No-Harm Physics-Informed Inverse Learning with Residual-Calibrated Uncertainty
Pith reviewed 2026-06-27 21:21 UTC · model grok-4.3
The pith
A learned PDE inverse solution is kept only if its residual-calibrated uncertainty radius is no larger than the baseline radius plus a safety margin.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Under a conditional stability estimate the sum of data, physics, boundary/initial-condition and optimization residuals produces an a posteriori reconstruction-error bound and a deterministic uncertainty radius; a learned reconstruction is therefore accepted only when R_learn ≤ R_base + ε_safe and is otherwise replaced by the baseline.
What carries the argument
The residual-calibrated uncertainty radius obtained by combining data, physics, boundary/initial-condition and optimization residuals under a conditional stability estimate, which supplies both the a posteriori error bound and the no-harm acceptance test.
If this is right
- The selector returns the baseline whenever a learned candidate is shifted, hallucinated or unfinished.
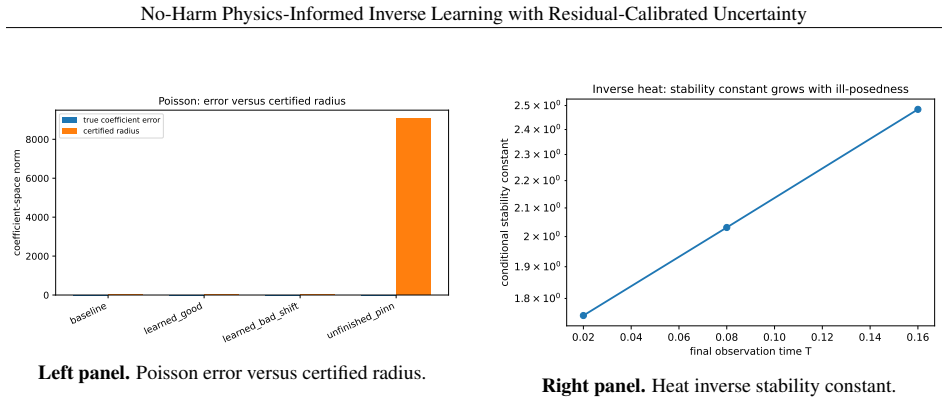
- The method grows conservative as the underlying inverse problem becomes more strongly ill-posed.
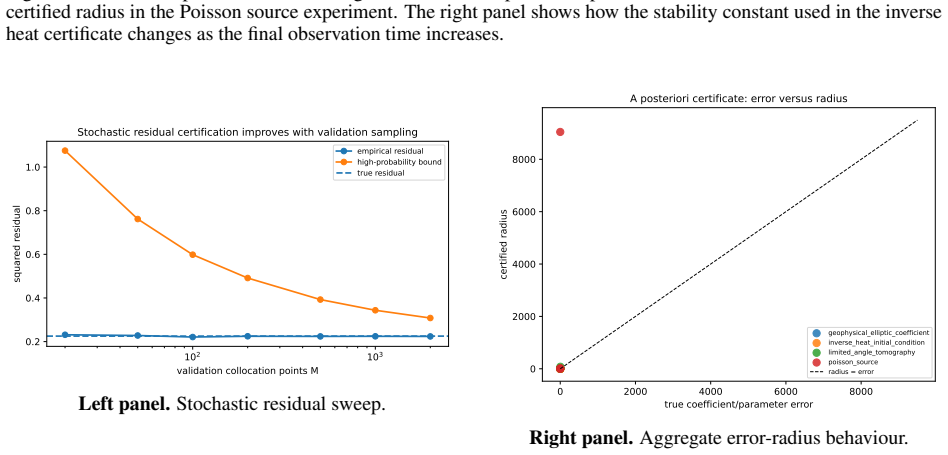
- High-probability certificates continue to hold when physics residuals are computed from independent random collocation points.
- The framework functions as an add-on certification layer rather than a new reconstruction architecture.
Where Pith is reading between the lines
- The same residual-to-radius conversion could be tested on forward problems or non-PDE inverse tasks whenever an analogous stability relation can be stated.
- The acceptance test supplies an automatic rejection signal that could be used to compare or prune different network architectures during training.
Load-bearing premise
A conditional stability estimate exists that turns the sum of the residuals into a bound on the reconstruction error.
What would settle it
A concrete inverse problem in which the combined residuals remain below a chosen threshold yet the true reconstruction error exceeds the radius predicted by the stability estimate.
Figures
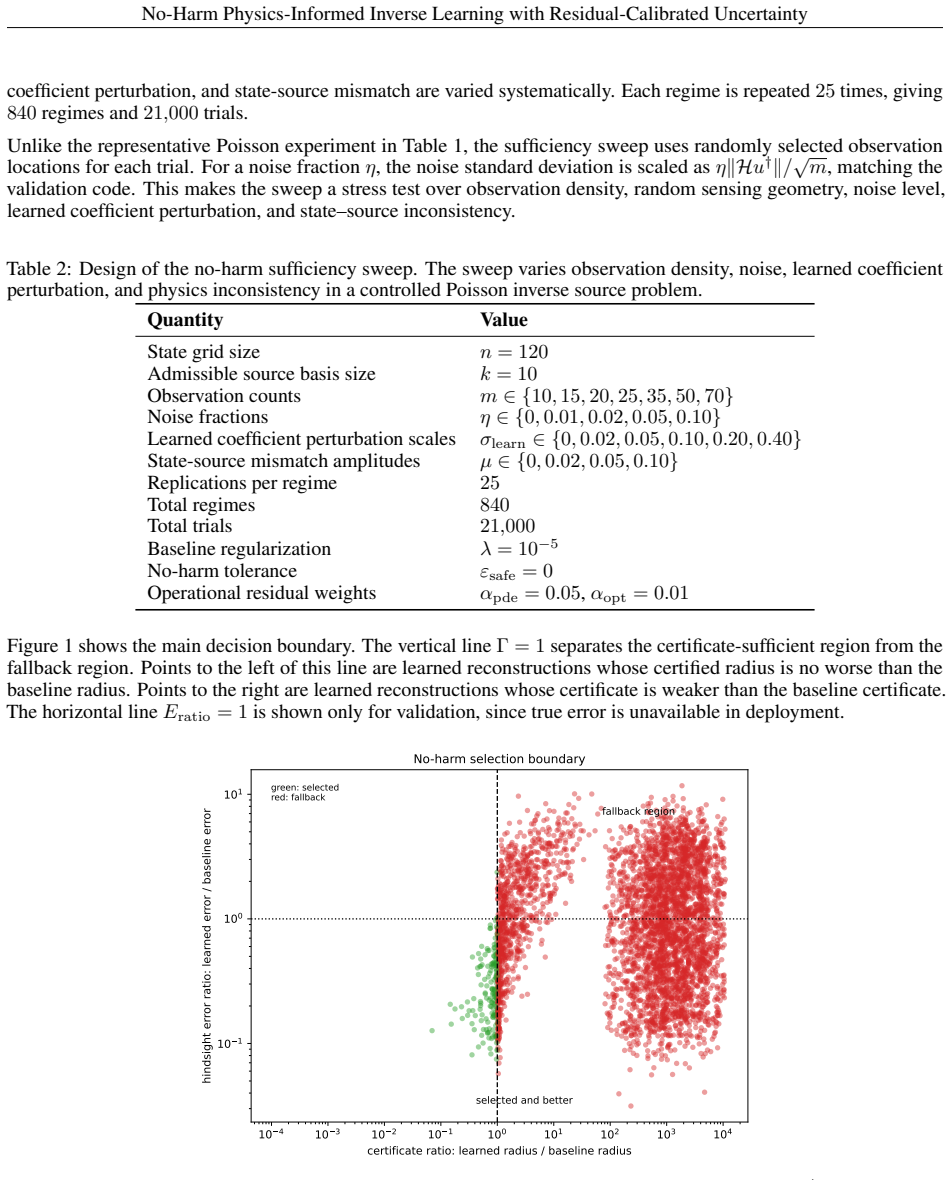
read the original abstract
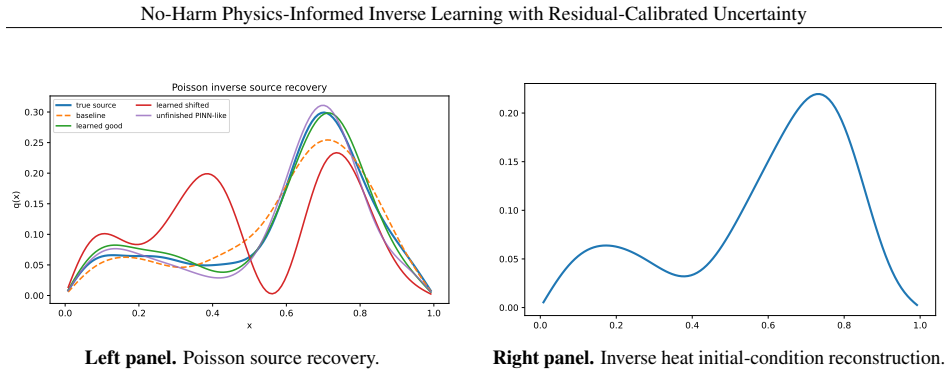
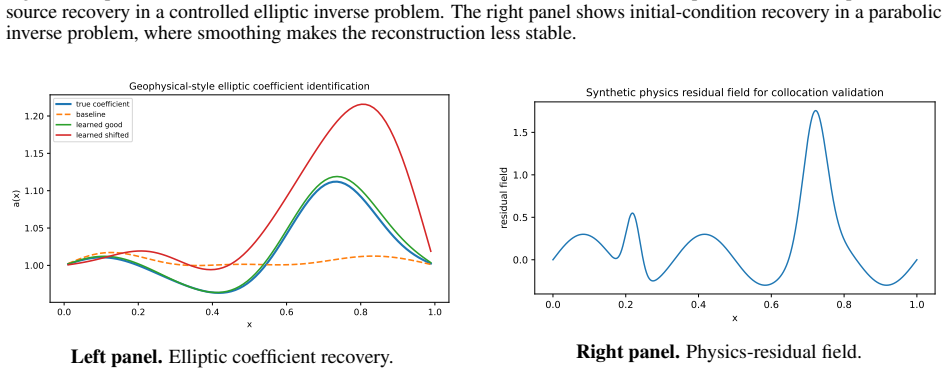
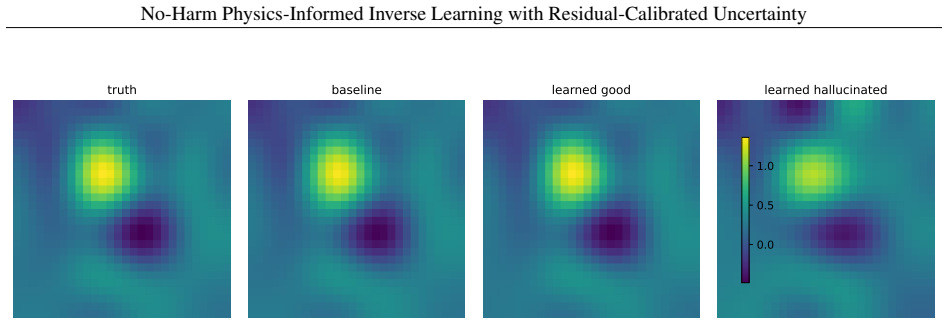
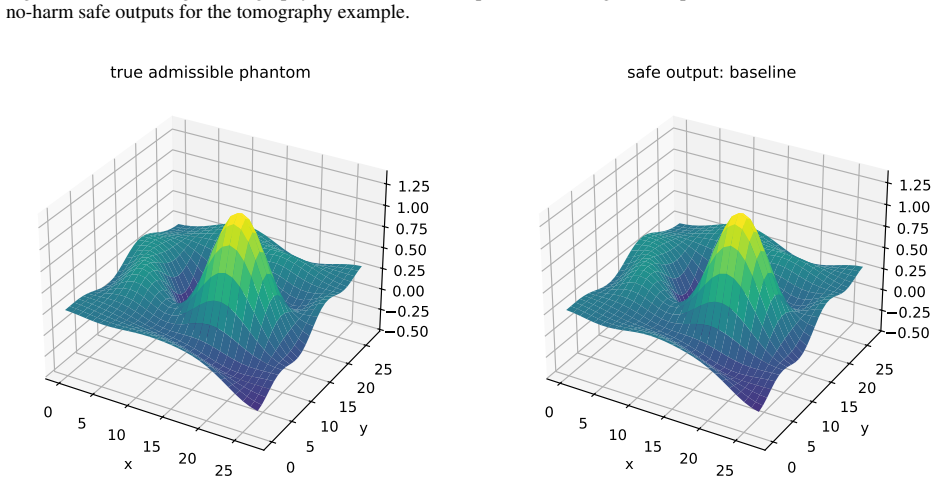
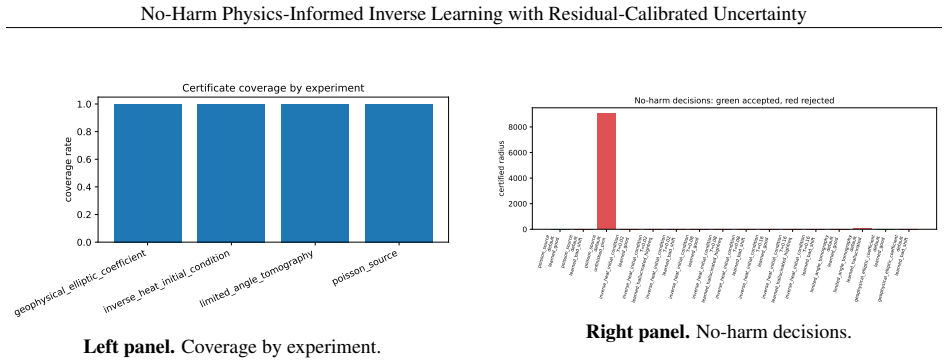
Physics-informed learning is increasingly used for partial differential equation (PDE)-governed inverse problems, but its reliability remains difficult to certify. This paper develops a no-harm certification-and-selection framework for physics-informed inverse learning. A learned reconstruction is accepted only when its residual-calibrated radius is no worse than the baseline radius, namely when $$R_{\mathrm{learn}}\le R_{\mathrm{base}}+\varepsilon_{\mathrm{safe}};$$otherwise, the method returns the baseline. The certificate combines data, physics, boundary or initial-condition, and optimization residuals. Under a conditional stability estimate, these residuals yield an a posteriori reconstruction-error bound and a deterministic uncertainty radius. A high-probability certificate is also derived for physics residuals estimated from independent random collocation points. Numerical tests on Poisson source recovery, inverse heat reconstruction, limited-angle tomography, elliptic coefficient identification, and stochastic residual validation show that the selector accepts certified improvements, rejects shifted, hallucinated, or unfinished candidates, and becomes conservative in strongly ill-posed regimes. The framework is therefore a certification-and-selection layer, not another reconstruction architecture.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a no-harm certification-and-selection framework for physics-informed inverse learning. It defines a residual-calibrated uncertainty radius from data, physics, boundary/initial-condition, and optimization residuals. Under a conditional stability estimate, this yields an a posteriori reconstruction-error bound. A learned reconstruction is accepted only if R_learn ≤ R_base + ε_safe; otherwise the baseline is returned. High-probability certificates are derived for random collocation points, and the approach is tested on Poisson source recovery, inverse heat, tomography, coefficient identification, and stochastic validation.
Significance. If the conditional stability estimates can be made rigorous with explicit constants for the target inverse problems, the framework offers a practical certification layer that prevents harm from unreliable learned reconstructions while allowing certified improvements. This addresses a central reliability gap in physics-informed methods for ill-posed inverse problems.
major comments (2)
- [Abstract] Abstract: The claim that the combined residuals yield an a posteriori reconstruction-error bound and deterministic uncertainty radius depends entirely on an unspecified conditional stability estimate. The manuscript invokes this estimate to convert residuals into the certified radius and the acceptance test but neither derives it, cites it with explicit constants, nor validates its tightness on the Poisson, heat, tomography, or coefficient-identification examples; this is load-bearing for the entire no-harm selector.
- [Numerical tests] Numerical experiments (as described in the abstract): The tests show the selector accepting certified improvements and rejecting shifted or hallucinated candidates, but provide no direct verification that the residual-derived radius bounds the true reconstruction error on any example; without this, the certification property remains conditional on the unverified stability premise.
minor comments (1)
- The safe margin ε_safe and the precise combination rule for the four residual types should be given explicit definitions and notation in the main text to improve readability.
Simulated Author's Rebuttal
We thank the referee for the thorough review and for highlighting the central role of the conditional stability estimate. We address the two major comments point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that the combined residuals yield an a posteriori reconstruction-error bound and deterministic uncertainty radius depends entirely on an unspecified conditional stability estimate. The manuscript invokes this estimate to convert residuals into the certified radius and the acceptance test but neither derives it, cites it with explicit constants, nor validates its tightness on the Poisson, heat, tomography, or coefficient-identification examples; this is load-bearing for the entire no-harm selector.
Authors: We agree that the conditional stability estimate is the key link converting residuals into a certified radius and that its explicit form is load-bearing. The manuscript treats the estimate as a standard assumption from inverse-problems theory rather than deriving it anew. In revision we will (i) add a short dedicated subsection that cites the relevant conditional-stability results for each of the four example classes, including references that supply explicit constants or rates where they exist in the literature, and (ii) state more explicitly that the no-harm guarantee is conditional on the validity of the cited estimate. Deriving sharp constants from first principles for every test problem lies outside the scope of a certification-layer paper; we therefore treat this as a citation task rather than a derivation task. revision: partial
-
Referee: [Numerical tests] Numerical experiments (as described in the abstract): The tests show the selector accepting certified improvements and rejecting shifted or hallucinated candidates, but provide no direct verification that the residual-derived radius bounds the true reconstruction error on any example; without this, the certification property remains conditional on the unverified stability premise.
Authors: The numerical section is intended to demonstrate the selector’s decision rule rather than to furnish an independent empirical proof of the stability estimate. We nevertheless accept that a direct comparison would strengthen the presentation. In the revised manuscript we will add, for every example where the ground truth is known, a supplementary plot or table that juxtaposes the residual-calibrated radius against the observed reconstruction error, thereby providing an empirical check on whether the bound is respected in practice. revision: yes
Circularity Check
No significant circularity; framework defined from residuals under external assumption
full rationale
The derivation defines the no-harm selector explicitly as the comparison R_learn ≤ R_base + ε_safe, where the radius itself is constructed from the sum of data/physics/BC/optimization residuals once a conditional stability estimate is assumed. This construction does not reduce any claimed prediction to a fitted parameter or to a self-citation chain; the stability estimate is treated as an external input rather than derived or smuggled via prior work by the same author. No self-definitional, fitted-input, or renaming patterns appear in the abstract or described framework. The result is therefore self-contained against the stated assumptions.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Existence of a conditional stability estimate converting summed residuals into a reconstruction-error bound
Reference graph
Works this paper leans on
-
[1]
Engl, Martin Hanke, and Andreas Neubauer.Regularization of Inverse Problems, volume 375 of Mathematics and Its Applications
Heinz W. Engl, Martin Hanke, and Andreas Neubauer.Regularization of Inverse Problems, volume 375 of Mathematics and Its Applications. Kluwer Academic Publishers, Dordrecht, 1996
1996
-
[2]
Springer, New York, 2 edition, 2011
Andreas Kirsch.An Introduction to the Mathematical Theory of Inverse Problems, volume 120 ofApplied Mathematical Sciences. Springer, New York, 2 edition, 2011
2011
-
[3]
Springer, New York, 2005
Jari Kaipio and Erkki Somersalo.Statistical and Computational Inverse Problems, volume 160 ofApplied Mathematical Sciences. Springer, New York, 2005
2005
-
[4]
Society for Industrial and Applied Mathematics, Philadelphia, 2010
Per Christian Hansen.Discrete Inverse Problems: Insight and Algorithms. Society for Industrial and Applied Mathematics, Philadelphia, 2010
2010
-
[5]
Tikhonov and Vasiliy Y
Andrey N. Tikhonov and Vasiliy Y . Arsenin.Solutions of Ill-Posed Problems. Winston, Washington, DC, 1977
1977
-
[6]
Oktem, and Carola-Bibiane Sch
Simon Arridge, Peter Maass, Ozan "Oktem, and Carola-Bibiane Sch"onlieb. Solving inverse problems using data-driven models.Acta Numerica, 28:1–174, 2019
2019
-
[7]
Learned primal-dual reconstruction.IEEE Transactions on Medical Imaging, 37(6):1322–1332, 2018
Jonas Adler and Ozan "Oktem. Learned primal-dual reconstruction.IEEE Transactions on Medical Imaging, 37(6):1322–1332, 2018
2018
-
[8]
Fourier neural operator for parametric partial differential equations.International Conference on Learning Representations, 2021
Zongyi Li, Nikola Kovachki, Kamyar Azizzadenesheli, Burigede Liu, Kaushik Bhattacharya, Andrew Stuart, and Anima Anandkumar. Fourier neural operator for parametric partial differential equations.International Conference on Learning Representations, 2021
2021
-
[9]
Vegard Antun, Francesco Renna, Clarice Poon, Ben Adcock, and Anders C. Hansen. On instabilities of deep learning in image reconstruction and the potential costs of AI.Proceedings of the National Academy of Sciences of the United States of America, 117(48):30088–30095, 2020
2020
-
[10]
Maziar Raissi, Paris Perdikaris, and George Em Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational Physics, 378:686–707, 2019
2019
-
[11]
Kevrekidis, Lu Lu, Paris Perdikaris, Sifan Wang, and Liu Yang
George Em Karniadakis, Ioannis G. Kevrekidis, Lu Lu, Paris Perdikaris, Sifan Wang, and Liu Yang. Physics- informed machine learning.Nature Reviews Physics, 3(6):422–440, 2021
2021
-
[12]
udiger Verf
R"udiger Verf"urth.A Posteriori Error Estimation Techniques for Finite Element Methods. Oxford University Press, Oxford, 2013
2013
-
[13]
T. J. Sullivan.Introduction to Uncertainty Quantification, volume 63 ofTexts in Applied Mathematics. Springer, Cham, 2015
2015
-
[14]
Andrew M. Stuart. Inverse problems: A bayesian perspective.Acta Numerica, 19:451–559, 2010
2010
-
[15]
Scientific machine learning through physics-informed neural networks: Where we are and what’s next
Salvatore Cuomo, Vincenzo Schiano Di Cola, Fabio Giampaolo, Gianluigi Rozza, Maziar Raissi, and Francesco Piccialli. Scientific machine learning through physics-informed neural networks: Where we are and what’s next. Journal of Scientific Computing, 92(3):88, 2022
2022
-
[16]
Springer, Dordrecht, 2009
Michael Hinze, Ren’e Pinnau, Michael Ulbrich, and Stefan Ulbrich.Optimization with PDE Constraints, volume 23 ofMathematical Modelling: Theory and Applications. Springer, Dordrecht, 2009
2009
-
[17]
Birkh"auser, Basel, 2003
Wolfgang Bangerth and Rolf Rannacher.Adaptive Finite Element Methods for Differential Equations. Birkh"auser, Basel, 2003
2003
-
[18]
Wright.Numerical Optimization
Jorge Nocedal and Stephen J. Wright.Numerical Optimization. Springer, New York, 2 edition, 2006
2006
-
[19]
Bertsekas.Nonlinear Programming
Dimitri P. Bertsekas.Nonlinear Programming. Athena Scientific, Belmont, MA, 2 edition, 1999. 25 No-Harm Physics-Informed Inverse Learning with Residual-Calibrated Uncertainty
1999
-
[20]
Springer, New York, 2 edition, 2006
Victor Isakov.Inverse Problems for Partial Differential Equations, volume 127 ofApplied Mathematical Sciences. Springer, New York, 2 edition, 2006
2006
-
[21]
Carleman estimates for parabolic equations and applications.Inverse Problems, 25(12):123013, 2009
Masahiro Yamamoto. Carleman estimates for parabolic equations and applications.Inverse Problems, 25(12):123013, 2009
2009
-
[22]
Vapnik.Statistical Learning Theory
Vladimir N. Vapnik.Statistical Learning Theory. Wiley, New York, 1998
1998
-
[23]
Cambridge University Press, Cambridge, 2014
Shai Shalev-Shwartz and Shai Ben-David.Understanding Machine Learning: From Theory to Algorithms. Cambridge University Press, Cambridge, 2014
2014
-
[24]
Tyrrell Rockafellar and Roger J.-B
R. Tyrrell Rockafellar and Roger J.-B. Wets.Variational Analysis, volume 317 ofGrundlehren der mathematischen Wissenschaften. Springer, Berlin, 1998
1998
-
[25]
Error bounds and convergence analysis of feasible descent methods: A general approach.Annals of Operations Research, 46(1):157–178, 1993
Zhi-Quan Luo and Paul Tseng. Error bounds and convergence analysis of feasible descent methods: A general approach.Annals of Operations Research, 46(1):157–178, 1993
1993
-
[26]
Proximal alternating linearized minimization for nonconvex and nonsmooth problems.Mathematical Programming, 146(1–2):459–494, 2014
Jérôme Bolte, Shoham Sabach, and Marc Teboulle. Proximal alternating linearized minimization for nonconvex and nonsmooth problems.Mathematical Programming, 146(1–2):459–494, 2014
2014
-
[27]
Probability inequalities for sums of bounded random variables.Journal of the American Statistical Association, 58(301):13–30, 1963
Wassily Hoeffding. Probability inequalities for sums of bounded random variables.Journal of the American Statistical Association, 58(301):13–30, 1963. A Proofs of theoretical results This appendix gives the proofs of the theoretical results stated in the main text. The notation is the same as in Sections 2–7. Definitions and assumptions are not reproved. ...
1963
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.