Improved visual-information-driven model for crowd simulation and its modular application
Pith reviewed 2026-05-22 22:28 UTC · model grok-4.3
The pith
A data-driven crowd simulation model with refined visual-information extraction and explicit exit cues works across multiple scenarios without retraining.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The model incorporates refined visual-information extraction and explicit exit cues so that core navigational features are captured well enough for the same trained system to perform across four fundamental modules and a composite scenario, matching real-world pedestrian trajectories and exceeding the classical knowledge-driven model.
What carries the argument
Data-driven crowd simulation model using refined visual-information extraction together with explicit exit cues, applied modularly to separate and combined layouts.
If this is right
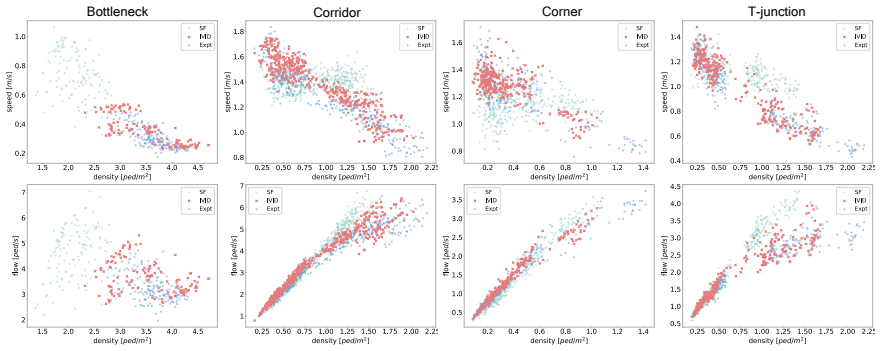
- The model reproduces pedestrian movement patterns observed in real experiments for bottleneck, corridor, corner, and T-junction modules.
- It outperforms the classical knowledge-driven model in the same modules.
- A modular construction allows the same model to handle a composite scenario built from the basic modules.
- Performance remains consistent without retraining when the scenario changes among the tested layouts.
Where Pith is reading between the lines
- A single model that works on basic modules could let planners test many layout variants with less custom work.
- The emphasis on visual and exit cues might extend naturally to settings where people must choose among several visible routes.
- If the approach holds in larger or dynamic spaces, it could reduce reliance on purely rule-based simulators for emergency planning.
Load-bearing premise
The refined visual-information extraction and explicit exit cues capture core navigational features sufficiently to enable flexibility across multiple scenarios without scenario-specific retraining.
What would settle it
A direct comparison in one of the tested modules or the composite scenario where the model deviates from recorded pedestrian paths or loses its advantage over the classical model.
Figures










read the original abstract
Crowd movement simulation is crucial for pedestrian safety management and facility design. Data-driven models offer the potential to improve realism and predictive accuracy, but most are developed for a single scenario, limiting their flexibility. We propose a data-driven crowd simulation model that incorporates refined visual-information extraction and explicit exit cues, aiming to improve flexibility across multiple scenarios by more effectively capturing core navigational features. The model is tested on four fundamental modules (bottleneck, corridor, corner, and T-junction) and further evaluated in a composite scenario using a modular approach. Results show that our model performs well across these scenarios, aligning with pedestrian movement in real-world experiments, and outperforms the classical knowledge-driven model in these scenarios. The research outcomes can provide inspiration for the development of data-driven crowd simulation models and advance the application of data-driven approaches.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a data-driven crowd simulation model incorporating refined visual-information extraction and explicit exit cues to improve flexibility across multiple scenarios without scenario-specific retraining. It evaluates the model on four fundamental modules (bottleneck, corridor, corner, T-junction) and a composite scenario via a modular approach, claiming alignment with real-world pedestrian experiments and outperformance over classical knowledge-driven models.
Significance. If the reported flexibility and outperformance hold under rigorous validation, the work could advance data-driven crowd simulation by addressing the common limitation of scenario-specific development, with potential benefits for pedestrian safety and facility design. The modular application strategy is a constructive element for practical reuse. However, the absence of any quantitative metrics, validation procedures, or experimental details prevents confirmation of these contributions.
major comments (1)
- [Abstract] Abstract: the central claims that the model 'performs well across these scenarios, aligning with pedestrian movement in real-world experiments, and outperforms the classical knowledge-driven model' are presented without any reported quantitative metrics (e.g., trajectory errors, density distributions), statistical tests, held-out test details, or comparison methodology; this absence is load-bearing for the primary contribution of cross-scenario superiority.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on strengthening the presentation of our results. We address the concern regarding quantitative support for the claims below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claims that the model 'performs well across these scenarios, aligning with pedestrian movement in real-world experiments, and outperforms the classical knowledge-driven model' are presented without any reported quantitative metrics (e.g., trajectory errors, density distributions), statistical tests, held-out test details, or comparison methodology; this absence is load-bearing for the primary contribution of cross-scenario superiority.
Authors: We agree that the abstract would be strengthened by explicitly summarizing the quantitative metrics that support the claims. The manuscript body reports trajectory matching errors, density distribution comparisons, and outperformance metrics against the classical model across the four modules and composite scenario, with validation against real pedestrian data. We will revise the abstract to include these specific metrics, along with a brief note on the comparison methodology, to make the contribution self-contained. revision: yes
Circularity Check
No significant circularity; derivation self-contained against external benchmarks
full rationale
The provided abstract and placeholder full-text reference contain no equations, parameter-fitting procedures, self-citations, or derivation steps that reduce a claimed prediction to its own inputs by construction. The model is described as data-driven and tested on modular scenarios with comparison to a classical knowledge-driven baseline, but no load-bearing step is exhibited that would qualify under the enumerated patterns. This is the normal honest finding when concrete technical details (training data, held-out metrics, or explicit ansatzes) are absent from the inspected text.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The IVID model comprises three key components: feature extraction, velocity-prediction neural network (VPNN), and rolling forecast... visual information extraction method and exit cues
-
IndisputableMonolith/Foundation/DimensionForcing.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
modular approach... assemble these fundamental modules into diverse complex scenarios, similar to building with Lego
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
D. Helbing, I. Farkas, T. Vicsek, Simulating dynamical features of escape panic, Nature 407 (6803) (2000) 487–490. 22
work page 2000
- [2]
-
[3]
P. Fiorini, Z. Shiller, Motion planning in dynamic environments using velocity obstacles, The International Journal of Robotics Research 17 (7) (1998) 760–772
work page 1998
-
[4]
J. van den Berg, M. Lin, D. Manocha, Reciprocal velocity obstacles for real-time multi- agent navigation, in: 2008 IEEE International Conference on Robotics and Automation, 2008, pp. 1928–1935
work page 2008
-
[5]
Modeling of pedestrian movement around 90 and 180 degree bends
B. Steffen, A. Seyfried, Modeling of pedestrian movement around 90 and 180 degree bends (2009).arXiv:0912.0610
work page internal anchor Pith review Pith/arXiv arXiv 2009
-
[6]
J. Ma, W. Song, J. Zhang, S. Lo, G. Liao, k-nearest-neighbor interaction induced self- organized pedestrian counter flow, Physica A: Statistical Mechanics and its Applications 389 (10) (2010) 2101–2117
work page 2010
-
[7]
W. Zeng, P. Chen, H. Nakamura, M. Iryo-Asano, Application of social force model to pedestrian behavior analysis at signalized crosswalk, Transportation Research Part C: Emerging Technologies 40 (2014) 143–159
work page 2014
-
[8]
W. Zeng, P. Chen, G. Yu, Y . Wang, Specification and calibration of a microscopic model for pedestrian dynamic simulation at signalized intersections: A hybrid approach, Trans- portation Research Part C: Emerging Technologies 80 (2017) 37–70
work page 2017
-
[9]
W. Xie, E. W. M. Lee, T. Li, M. Shi, R. Cao, Y . Zhang, A study of group effects in pedestrian crowd evacuation: Experiments, modelling and simulation, Safety Science 133 (2021) 105029
work page 2021
-
[10]
W. Xie, E. W. M. Lee, Y . Y . Lee, Self-organisation phenomena in pedestrian counter flows and its modelling, Safety Science 155 (2022) 105875
work page 2022
-
[11]
J. Lee, T. Kim, J. Chung, J. Kim, Modeling lane formation in pedestrian counter flow and its effect on capacity, KSCE Journal of Civil Engineering 20 (3) (2016) 1099–1108, publisher Copyright: © 2016, Korean Society of Civil Engineers and Springer-Verlag Berlin Heidelberg
work page 2016
-
[12]
D. Helbing, I. J. Farkas, P. Molnar, T. Vicsek, Simulation of pedestrian crowds in normal and evacuation situations, Pedestrian and evacuation dynamics 21 (2) (2002) 21–58. 23
work page 2002
-
[13]
X. Song, K. Chen, X. Li, J. Sun, B. Hou, Y . Cui, B. Zhang, G. Xiong, Z. Wang, Pedestrian trajectory prediction based on deep convolutional lstm network, IEEE Transactions on Intelligent Transportation Systems 22 (6) (2021) 3285–3302
work page 2021
-
[14]
Y . Ma, E. W. Lee, Z. Hu, M. Shi, R. K. Yuen, An intelligence-based approach for pre- diction of microscopic pedestrian walking behavior, IEEE Transactions on Intelligent Transportation Systems 20 (10) (2019) 3964–3980
work page 2019
-
[15]
J. Ma, W. guo Song, Z. ming Fang, S. ming Lo, G. xuan Liao, Experimental study on microscopic moving characteristics of pedestrians in built corridor based on digital image processing, Building and Environment 45 (10) (2010) 2160–2169
work page 2010
-
[16]
X. Liu, W. Song, J. Zhang, Extraction and quantitative analysis of microscopic evacuation characteristics based on digital image processing, Physica A: Statistical Mechanics and its Applications 388 (13) (2009) 2717–2726
work page 2009
- [17]
-
[18]
Y . Ma, E. W. M. Lee, R. K. K. Yuen, An artificial intelligence-based approach for sim- ulating pedestrian movement, IEEE Transactions on Intelligent Transportation Systems 17 (11) (2016) 3159–3170
work page 2016
-
[19]
X. Zhao, L. Xia, J. Zhang, W. Song, Artificial neural network based modeling on uni- directional and bidirectional pedestrian flow at straight corridors, Physica A: Statistical Mechanics and its Applications 547 (2020) 123825
work page 2020
-
[20]
X. Zhao, J. Zhang, W. Song, A radar-nearest-neighbor based data-driven approach for crowd simulation, Transportation Research Part C: Emerging Technologies 129 (2021) 103260
work page 2021
- [21]
- [22]
-
[23]
H. Li, Z. Liu, B. Zhou, Modeling analysis of t-shaped crowd flow based on artificial neural network, in: CIBDA 2022; 3rd International Conference on Computer Information and Big Data Applications, 2022, pp. 1–5. 24
work page 2022
- [24]
-
[25]
R. Bastien, P. Romanczuk, A model of collective behavior based purely on vision, Science Advances 6 (6) (2020) eaay0792
work page 2020
-
[26]
G. Courtine, M. Schieppati, Human walking along a curved path. i. body trajectory, seg- ment orientation and the effect of vision, European Journal of Neuroscience 18 (1) (2003) 177–190
work page 2003
-
[27]
J. Ma, W. Song, Z. Fang, S. Lo, G. Liao, Experimental study on microscopic moving characteristics of pedestrians in built corridor based on digital image processing, Building and Environment 45 (10) (2010) 2160–2169
work page 2010
-
[28]
D. Yanagisawa, A. Kimura, A. Tomoeda, R. Nishi, Y . Suma, K. Ohtsuka, K. Nishinari, Introduction of frictional and turning function for pedestrian outflow with an obstacle, Physical Review E 80 (3) (sep 2009)
work page 2009
-
[29]
Helbing, Traffic and related self-driven many-particle systems, Rev
D. Helbing, Traffic and related self-driven many-particle systems, Rev. Mod. Phys. 73 (2001) 1067–1141
work page 2001
-
[30]
W. Xie, E. W. M. Lee, Y . Y . Lee, Simulation of spontaneous leader–follower behaviour in crowd evacuation, Automation in Construction 134 (2022) 104100
work page 2022
- [31]
-
[32]
S. Bai, J. Z. Kolter, V . Koltun, An empirical evaluation of generic convolutional and recurrent networks for sequence modeling, arXiv preprint arXiv:1803.01271 (2018)
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[33]
T. Salimans, D. P. Kingma, Weight normalization: A simple reparameterization to ac- celerate training of deep neural networks, Advances in neural information processing systems 29 (2016)
work page 2016
-
[34]
V . Nair, G. E. Hinton, Rectified linear units improve restricted boltzmann machines, in: Icml, 2010
work page 2010
-
[35]
N. Srivastava, G. Hinton, A. Krizhevsky, I. Sutskever, R. Salakhutdinov, Dropout: a simple way to prevent neural networks from overfitting, The journal of machine learning research 15 (1) (2014) 1929–1958. 25
work page 2014
-
[36]
D. P. Kingma, J. Ba, Adam: A method for stochastic optimization (2017).arXiv: 1412.6980
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[37]
M. Chraibi, M. Freialdenhoven, A. Schadschneider, A. Seyfried, Modeling the desired direction in a force-based model for pedestrian dynamics, in: V . V . Kozlov, A. P. Buslaev, A. S. Bugaev, M. V . Yashina, A. Schadschneider, M. Schreckenberg (Eds.), Traffic and Granular Flow ’11, Springer Berlin Heidelberg, Berlin, Heidelberg, 2013, pp. 263–275
work page 2013
- [38]
-
[39]
S. Hoogendoorn, P. Bovy, Pedestrian route-choice and activity scheduling theory and models, Transportation Research Part B: Methodological 38 (2) (2004) 169–190
work page 2004
-
[40]
M. Haghani, M. Sarvi, Pedestrian crowd tactical-level decision making during emergency evacuations, Journal of Advanced Transportation 50 (8) (2016) 1870–1895
work page 2016
-
[41]
Z. Fu, K. Jiang, C. Xie, Y . Xu, J. Huang, D. Yang, Summary and reflections on pedestrian trajectory prediction in the field of autonomous driving, IEEE Transactions on Intelligent Vehicles (2024) 1–33
work page 2024
- [42]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.