Linearization-Based Feedback Stabilization of McKean-Vlasov PDEs
Pith reviewed 2026-05-19 04:22 UTC · model grok-4.3
The pith
A Riccati feedback law stabilizes McKean-Vlasov PDEs locally exponentially around a target stationary distribution.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors construct a stabilizing feedback operator from the solution of an algebraic Riccati equation associated to the linearized McKean-Vlasov operator after a ground-state transformation. This feedback, when applied to the full nonlinear PDE, yields local exponential convergence to the equilibrium in a suitable norm, with the rate determined by the choice of control parameters. The construction relies on spectral analysis and verification of the infinite-dimensional Hautus test for the transformed operator.
What carries the argument
The Riccati feedback law derived from the spectral analysis of the ground-state transformed linearized operator, which provides the stabilizing control input via a time-dependent potential.
If this is right
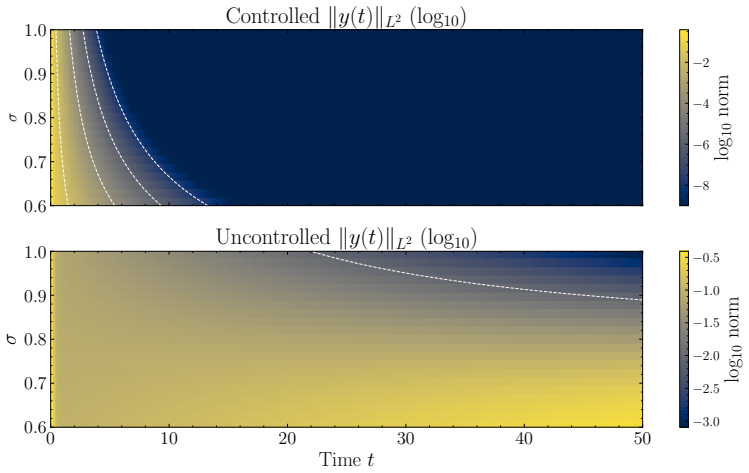
- Local exponential stabilization is achieved with a user-specified convergence rate.
- The strategy applies to the noisy Kuramoto model, O(2) spin model, and von Mises potentials as demonstrated numerically.
- Unstable equilibria can be stabilized and convergence to stationary distributions can be accelerated.
- The control is realized through a time-dependent potential acting on the torus.
Where Pith is reading between the lines
- The framework may extend to other mean-field models beyond the torus domain.
- Prescribing the rate could enable adaptive control in real-time applications of interacting systems.
- Further analysis might reveal how the method performs under parameter variations in the interaction kernel.
Load-bearing premise
The linearized operator around the target equilibrium must satisfy the infinite-dimensional Hautus test to permit construction of a stabilizing Riccati feedback.
What would settle it
A numerical simulation or analytical counterexample showing that the closed-loop system does not exhibit the predicted exponential decay rate for initial conditions near the equilibrium would falsify the stabilization claim.
Figures







read the original abstract
We develop a feedback control framework for stabilizing the McKean-Vlasov PDE on the torus. Our goal is to steer the dynamics toward a prescribed stationary distribution or accelerate convergence to it using a time-dependent control potential. We reformulate the controlled PDE in a weighted, zero-mean space and apply the ground-state transform to obtain a Schrodinger-type operator. The resulting operator framework enables spectral analysis, verification of the infinite-dimensional Hautus test, and construction of a Riccati-based feedback law derived from the linearized dynamics, yielding local exponential stabilization with a chosen convergence rate. We rigorously prove local exponential stabilization via maximal regularity arguments and nonlinear estimates. Numerical experiments on well-studied models in one and two dimensions (the noisy Kuramoto model for synchronization, the O(2) spin model in a magnetic field, and the von Mises attractive interaction potential) showcase the effectiveness of our control strategy, demonstrating convergence acceleration and stabilization of unstable equilibria.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a feedback stabilization framework for controlled McKean-Vlasov PDEs on the torus. It reformulates the system in a weighted zero-mean space, applies the ground-state transform to obtain a Schrödinger-type operator, performs spectral analysis to verify the infinite-dimensional Hautus test, constructs a Riccati-based feedback law from the linearized dynamics, and proves local exponential stabilization with a prescribed rate via maximal regularity and nonlinear perturbation estimates. Numerical illustrations are provided for the noisy Kuramoto model, O(2) spin model, and von Mises interaction potential.
Significance. If the central claims hold, the work supplies a systematic linearization-based method for local stabilization of nonlocal mean-field PDEs with explicit convergence rate, extending Riccati theory and maximal regularity techniques to this setting. The combination of ground-state transform, Hautus verification, and rigorous nonlinear estimates is a technical strength; the numerical examples on standard synchronization models further support applicability to interacting particle systems.
major comments (2)
- [§3] §3 (Spectral analysis and Hautus test): The verification that the linearized operator (after ground-state transform and reformulation in the weighted zero-mean space) satisfies the infinite-dimensional Hautus test is asserted to enable the algebraic Riccati equation and stabilizing feedback, but the precise range condition (unstable eigenvalues lying in the range of the control operator) is not shown explicitly for the target equilibria or kernels; this check is load-bearing for the existence of the feedback operator and must be uniform in the prescribed rate.
- [§4] §4 (Feedback construction): The domain of the resulting Riccati feedback operator is not specified with sufficient precision (e.g., relative to the maximal regularity space), which is required to close the nonlinear estimates in the subsequent local stabilization proof.
minor comments (2)
- [§2] The notation distinguishing the original McKean-Vlasov variable from the transformed Schrödinger variable could be made more consistent across sections to improve readability.
- [§4] A brief remark on how the chosen convergence rate enters the Riccati equation would clarify the dependence of the feedback gain on this parameter.
Simulated Author's Rebuttal
We thank the referee for the thorough reading and constructive comments on our manuscript. The suggestions help clarify key technical points in the spectral analysis and feedback construction. We address each major comment below and will revise the manuscript to incorporate the requested details while preserving the core results on linearization-based stabilization of McKean-Vlasov PDEs.
read point-by-point responses
-
Referee: §3 (Spectral analysis and Hautus test): The verification that the linearized operator (after ground-state transform and reformulation in the weighted zero-mean space) satisfies the infinite-dimensional Hautus test is asserted to enable the algebraic Riccati equation and stabilizing feedback, but the precise range condition (unstable eigenvalues lying in the range of the control operator) is not shown explicitly for the target equilibria or kernels; this check is load-bearing for the existence of the feedback operator and must be uniform in the prescribed rate.
Authors: We agree that an explicit verification of the range condition strengthens the argument. In Section 3, the infinite-dimensional Hautus test is established via the spectral decomposition of the ground-state transformed operator, showing that the unstable spectrum is finite and that the control operator acts nontrivially on the corresponding eigenspaces for the chosen kernels. To address the referee's point directly, we will add a new lemma in the revised Section 3 that explicitly confirms, for each target equilibrium (uniform distribution and synchronized states) and admissible control potentials, that every unstable eigenvalue lies in the range of the control operator. The argument will be shown to hold uniformly for stabilization rates below the spectral gap of the linearized operator, using the explicit form of the eigenfunctions on the torus. This addition closes the gap without altering the existing proofs. revision: yes
-
Referee: §4 (Feedback construction): The domain of the resulting Riccati feedback operator is not specified with sufficient precision (e.g., relative to the maximal regularity space), which is required to close the nonlinear estimates in the subsequent local stabilization proof.
Authors: We acknowledge that greater precision on the domain is needed for rigor. The Riccati feedback is obtained from the solution of the algebraic Riccati equation associated with the linearized operator in the weighted zero-mean space. In the revised manuscript we will explicitly define the domain of the feedback operator as the intersection of the domain of the linearized generator with the maximal regularity space (specifically, functions whose time derivative lies in L^2(0,T; H^{-1}) and whose spatial regularity satisfies the appropriate Sobolev embedding). We will also insert a short proposition verifying that this domain is invariant under the nonlinear perturbation and that the feedback term maps into the control space, thereby allowing the nonlinear estimates in the local stabilization theorem to close directly. These clarifications will be added to Section 4 without changing the overall proof strategy. revision: yes
Circularity Check
No circularity: standard linear control theory applied to transformed operator with explicit verification steps
full rationale
The derivation begins with reformulation of the controlled McKean-Vlasov PDE into a weighted zero-mean space, applies the ground-state transform to obtain a Schrödinger-type operator, performs spectral analysis, verifies the infinite-dimensional Hautus test for the linearized operator, constructs the Riccati feedback, and closes the local exponential stabilization via maximal regularity and nonlinear perturbation estimates. Each step invokes external functional-analytic tools (maximal regularity, Riccati theory) rather than reducing the target stabilization claim to a fitted parameter, self-referential definition, or unverified self-citation chain. The Hautus test is treated as a model-dependent condition to be checked after spectral analysis, not smuggled in as an ansatz or renamed known result; the nonlinear estimates are independent of the linear feedback construction. No load-bearing premise collapses to the paper's own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The linearized McKean-Vlasov operator satisfies the infinite-dimensional Hautus test after the ground-state transform.
- standard math Maximal regularity holds for the controlled parabolic operator on the torus.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We reformulate the controlled PDE in a weighted, zero-mean space and apply the ground-state transform to obtain a Schrödinger-type operator. The resulting operator framework enables spectral analysis, verification of the infinite-dimensional Hautus test, and construction of a Riccati-based feedback law
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 3.1 (Hautus δ-stabilisation). ... If the shape functions αj solve ∇·(μ̄∇αj)=ψj ... then (L,B) satisfies the infinite-dimensional Hautus test
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
J. A. Acebr´ on, L. L. Bonilla, Conrad J. P´ erez V., F. Ritort, and R. Spigler. The kuramoto model: A simple paradigm for synchronization phenomena. Rev. Mod. Phys., 77:137–185, Apr 2005
work page 2005
-
[2]
Control of high-dimensional collective dynamics by deep neural feedback laws and kinetic modelling
Giacomo Albi, Sara Bicego, and Dante Kalise. Control of high-dimensional collective dynamics by deep neural feedback laws and kinetic modelling. Journal of Computational Physics , page 114229, 2025
work page 2025
-
[3]
Giacomo Albi, Young-Pil Choi, Massimo Fornasier, and Dante Kalise. Mean field control hierarchy. Applied Mathematics & Optimization , 76(1):93–135, 2017
work page 2017
-
[4]
Luigi Ambrosio, Nicola Gigli, and Giuseppe Savar´ e.Gradient flows: in metric spaces and in the space of probability measures. Springer, 2005
work page 2005
-
[5]
A maximum principle for SDEs of mean-field type
Daniel Andersson and Boualem Djehiche. A maximum principle for SDEs of mean-field type. Applied Mathematics & Optimization , 63(3):341–356, 2011
work page 2011
-
[6]
Well-posedness and stationary solutions of McKean-Vlasov (S) PDEs
Letizia Angeli, Julien Barr´ e, Martin Kolodziejczyk, and Michela Ottobre. Well-posedness and stationary solutions of McKean-Vlasov (S) PDEs. Journal of Mathematical Analysis and Applications, 526(2):127301, 2023
work page 2023
-
[7]
A Fokker–Planck control framework for stochastic systems
Mario Annunziato and Alfio Borz` ı. A Fokker–Planck control framework for stochastic systems. EMS Surveys in Mathematical Sciences , 5(1):65–98, 2018
work page 2018
-
[8]
M. Soledad Aronna and F. Tr¨ oltzsch. First and second order optimality conditions for the control of Fokker-Planck equations. ESAIM: COCV, 27:15, 2021
work page 2021
-
[9]
Exact controllability of Fokker–Planck equations and McKean–Vlasov SDEs
Viorel Barbu. Exact controllability of Fokker–Planck equations and McKean–Vlasov SDEs. SIAM Journal on Control and Optimization , 61(3):1805–1818, 2023
work page 2023
-
[10]
S. Becker and A. Menegaki. Spectral gap in mean-field O(n)-model. Comm. Math. Phys. , 380(3):1361–1400, 2020
work page 2020
-
[11]
Representation and control of infinite dimensional systems
Alain Bensoussan, Giuseppe Da Prato, Michel C Delfour, and Sanjoy K Mitter. Representation and control of infinite dimensional systems . Springer, 2007
work page 2007
-
[12]
Mean Field Games and Mean Field Type Control
Alain Bensoussan, Jens Frehse, and Philip Yam. Mean Field Games and Mean Field Type Control. Springer, New York, 2013
work page 2013
-
[13]
Dynamical aspects of mean field plane rotators and the Kuramoto model
Lorenzo Bertini, Giambattista Giacomin, and Khashayar Pakdaman. Dynamical aspects of mean field plane rotators and the Kuramoto model. Journal of Statistical Physics , 138:270–290, 2010. 22
work page 2010
-
[14]
Stability of stationary states for mean field models with multichromatic interaction potentials
Benedetta Bertoli, Benjamin D Goddard, and Grigorios A Pavliotis. Stability of stationary states for mean field models with multichromatic interaction potentials. IMA Journal of Applied Mathematics, 89(5):833–859, 2024
work page 2024
- [15]
-
[16]
Andr´ e Blaqui` ere. Controllability of Fokker-Planck equations, the Schr¨ odinger system under related stochastic optimal control. Dynamics and Control , 2(3):235–253, 1992
work page 1992
-
[17]
Mean-field Pontryagin maximum principle
Mattia Bongini, Massimo Fornasier, Francesco Rossi, and Francesco Solombrino. Mean-field Pontryagin maximum principle. Journal of Optimization Theory and Applications , 175(1):1–38, 2017
work page 2017
-
[18]
T. Breiten, K. Kunisch, and L. Pfeiffer. Control strategies for the Fokker-Planck equation. ESAIM: COCV, 24(2), 2018
work page 2018
-
[19]
T. Breiten and K. K. Kunisch. Improving the convergence rates for the kinetic Fokker-Planck equation by optimal control. SIAM J. Control Optim. , 61(3):1557–1581, 2023
work page 2023
-
[20]
Ren´ e Carmona, Fran¸ cois Delarue, et al.Probabilistic theory of mean field games with applications I-II, volume 3. Springer, 2018
work page 2018
-
[21]
Control of McKean-Vlasov dynamics versus mean field games
Ren´ e Carmona, Fran¸ cois Delarue, and Aim´ e Lachapelle. Control of McKean-Vlasov dynamics versus mean field games. Mathematics and Financial Economics , 7:131–166, 2013
work page 2013
-
[22]
J. A. Carrillo, R. S. Gvalani, G. A. Pavliotis, and A. Schlichting. Long-time behaviour and phase transitions for the McKean-Vlasov equation on the torus. Archive for Rational Mechanics and Analysis, 235:635–690, 2020
work page 2020
-
[23]
Jos´ e A. Carrillo, Robert J. McCann, and C´ edric Villani. Kinetic equilibration rates for granular media and related equations: entropy dissipation and mass transportation estimates. Revista Matem´ atica Iberoamericana, 19(3):971–1018, 2003
work page 2003
-
[24]
The McKean–Vlasov equation in finite volume
Lina Chayes and Vladimir Panferov. The McKean–Vlasov equation in finite volume. Journal of Statistical Physics , 138(1–3):351–380, 2010
work page 2010
-
[25]
Li Chen, Yucheng Wang, and Valeriia Zhidkova. Optimal control for Kuramoto model: from many-particle liouville equation to diffusive mean-field problem. arXiv preprint arXiv:2504.09425, 2025
-
[26]
Jean-Michel Coron. Control and nonlinearity. Number 136 in 1. American Mathematical Soc., 2007
work page 2007
-
[27]
An introduction to infinite-dimensional linear systems theory , volume 21
Ruth F Curtain and Hans Zwart. An introduction to infinite-dimensional linear systems theory , volume 21. Springer Science & Business Media, 2012
work page 2012
-
[28]
Donald A. Dawson. Critical dynamics and fluctuations for a mean-field model of cooperative behavior. Journal of Statistical Physics , 31(1):29–85, 1983
work page 1983
-
[29]
A. Fleig and R. Guglielmi. Optimal control of the Fokker-Planck equation with space-dependent controls. Journal of Optimization Theory and Applications , 174, Aug. 2017. 23
work page 2017
-
[30]
J. Garnier, G. Papanicolaou, and T.-W. Yang. Consensus convergence with stochastic effects. Vietnam J. Math. , 45(1-2):51–75, 2017
work page 2017
-
[31]
Opinion dynamics and bounded confidence models, analysis, and simulation
Rainer Hegselmann and Ulrich Krause. Opinion dynamics and bounded confidence models, analysis, and simulation. Journal of Artifical Societies and Social Simulation (JASSS) vol , 5(3), 2002
work page 2002
-
[32]
Minyi Huang, Roland P. Malham´ e, and Peter E. Caines. Large population stochastic dynamic games: closed-loop McKean-Vlasov systems and the Nash certainty equivalence principle. Communications in Information & Systems , 6(3):221 – 252, 2006
work page 2006
-
[33]
A spectral approach to optimal control of the Fokker-Planck equation
Dante Kalise, Lucas M Moschen, Grigorios A Pavliotis, and Urbain Vaes. A spectral approach to optimal control of the Fokker-Planck equation. IEEE Control Systems Letters , 2025
work page 2025
-
[34]
Perturbation theory for linear operators , volume 132
Tosio Kato. Perturbation theory for linear operators , volume 132. Springer Science & Business Media, 2013
work page 2013
-
[35]
Jean-Michel Lasry and Pierre-Louis Lions. Mean field games. Japanese journal of mathematics , 2(1):229–260, 2007
work page 2007
-
[36]
Non-homogeneous boundary value problems and applications: Vol
Jacques Louis Lions and Enrico Magenes. Non-homogeneous boundary value problems and applications: Vol. 1 , volume 181. Springer Science & Business Media, 2012
work page 2012
-
[37]
Logarithmic Sobolev inequalities for some nonlinear PDE’s
Florient Malrieu. Logarithmic Sobolev inequalities for some nonlinear PDE’s. Stochastic processes and their applications, 95(1):109–132, 2001
work page 2001
-
[38]
H. P. McKean. Propagation of chaos for a class of non-linear parabolic equations. Lecture Series in Differential Equations, Volume 2 (ed. A. K. Aziz), no. 19 in Van Nostrand Mathematical Studies, pages 177–194, 1969
work page 1969
-
[39]
A class of Markov processes associated with nonlinear parabolic equations
Henry P McKean Jr. A class of Markov processes associated with nonlinear parabolic equations. Proceedings of the National Academy of Sciences , 56(6):1907–1911, 1966
work page 1907
-
[40]
Bayesian nonparametric inference in McKean-Vlasov models
Richard Nickl, Grigorios A Pavliotis, and Kolyan Ray. Bayesian nonparametric inference in McKean-Vlasov models. The Annals of statistics , 53(1):170–193, 2025
work page 2025
-
[41]
A martingale approach to the law of large numbers for weakly interacting stochastic processes
Klaus Oelschl¨ ager. A martingale approach to the law of large numbers for weakly interacting stochastic processes. Annals of Probability, 12(2):458–479, 1984
work page 1984
-
[42]
Linearization of ergodic McKean SDEs and applica- tions
Grigorios A Pavliotis and Andrea Zanoni. Linearization of ergodic McKean SDEs and applica- tions. arXiv preprint arXiv:2501.13655 , 2025
-
[43]
Information-theoretic description of a feedback-control Kuramoto model
Damian R Sowinski, Adam Frank, and Gourab Ghoshal. Information-theoretic description of a feedback-control Kuramoto model. Physical Review Research, 6(4):043188, 2024
work page 2024
-
[44]
Stability of incoherence in a population of coupled oscillators
Steven H Strogatz and Renato E Mirollo. Stability of incoherence in a population of coupled oscillators. Journal of Statistical Physics , 63:613–635, 1991
work page 1991
-
[45]
Topics in propagation of chaos
Alain-Sol Sznitman. Topics in propagation of chaos. Ecole d’´ et´ e de probabilit´ es de Saint-Flour XIX—1989, 1464:165–251, 1991
work page 1989
-
[46]
On asymptotic behaviors of the solution of a nonlinear diffusion equation
Yoshihisa Tamura. On asymptotic behaviors of the solution of a nonlinear diffusion equation. J. Fac. Sci. Univ. Tokyo Sect. IA Math. , 31:195–221, 1984. 24
work page 1984
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.