Provable Non-Convex Euclidean Distance Matrix Completion: Geometry, Reconstruction, and Robustness
Pith reviewed 2026-05-19 01:29 UTC · model grok-4.3
The pith
Riemannian gradient descent on rank-r Gram matrices recovers point configurations from partial distances with linear convergence when sampling exceeds a bound set by incoherence and rank.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By encoding observed distances as expansion coefficients in a non-orthogonal basis and optimizing over the space of rank-r Gram matrices, the authors show that Riemannian gradient descent converges linearly to the true low-rank solution with high probability, provided the sampling probability p satisfies p ≥ O(ν² r² log(n)/n). This holds under a Bernoulli model for which distances are observed. The proof relies on establishing a restricted isometry property for the associated symmetric linear operator through analysis of a second-order degenerate U-statistic. Initialization via one-step hard thresholding succeeds under the milder condition p ≥ O(ν r^{3/2} log^{3/4}(n)/n^{1/4}).
What carries the argument
Riemannian gradient descent on the manifold of rank-r positive semidefinite matrices, with the central analytic step being the restricted isometry property of the symmetric linear operator induced by the dual basis expansion of the observed distances.
Load-bearing premise
The true point configuration produces a Gram matrix that is exactly rank-r and whose incoherence parameter with respect to the distance operator remains bounded.
What would settle it
A configuration of points whose Gram matrix is exactly rank-r with bounded incoherence, yet Riemannian gradient descent fails to converge to the correct solution even when distances are observed at a probability meeting or exceeding the stated bound.
Figures






read the original abstract
The problem of recovering the configuration of points from their partial pairwise distances, referred to as the Euclidean Distance Matrix Completion (EDMC) problem, arises in a broad range of applications, including sensor network localization, molecular conformation, and manifold learning. In this paper, we propose a Riemannian optimization framework for solving the EDMC problem by formulating it as a low-rank matrix completion task over the space of positive semi-definite Gram matrices. The available distance measurements are encoded as expansion coefficients in a non-orthogonal basis, and optimization over the Gram matrix implicitly enforces geometric consistency through nonnegativity and the triangle inequality, a structure inherited from classical multidimensional scaling. Under a Bernoulli sampling model for observed distances, we prove that Riemannian gradient descent on the manifold of rank-$r$ matrices locally converges linearly with high probability when the sampling probability satisfies $p\geq O(\nu^2 r^2\log(n)/n)$, where $\nu$ is an EDMC-specific incoherence parameter. Furthermore, we provide an initialization candidate using a one-step hard thresholding procedure that yields convergence, provided the sampling probability satisfies $p \geq O(\nu r^{3/2}\log^{3/4}(n)/n^{1/4})$. A key technical contribution of this work is the analysis of a symmetric linear operator arising from a dual basis expansion in the non-orthogonal basis, which requires analysis of a second order degenerate U-statistic to establish an optimal restricted isometry property in the presence of coupled terms. Empirical evaluations on synthetic data demonstrate that our algorithm achieves competitive performance relative to state-of-the-art methods. Moreover, we provide a geometric interpretation of matrix incoherence tailored to the EDMC setting and provide robustness guarantees for our method.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formulates Euclidean Distance Matrix Completion (EDMC) as low-rank matrix completion over the manifold of positive semi-definite Gram matrices and develops a Riemannian gradient descent algorithm. Under a Bernoulli sampling model, it claims local linear convergence with high probability when the sampling probability satisfies p ≥ O(ν² r² log(n)/n), where ν is an EDMC-specific incoherence parameter. It also supplies a one-step hard-thresholding initialization that succeeds for p ≥ O(ν r^{3/2} log^{3/4}(n)/n^{1/4}), analyzes a symmetric linear operator via second-order degenerate U-statistics to obtain a restricted isometry property, provides a geometric interpretation of incoherence, and reports competitive empirical performance on synthetic data together with robustness guarantees.
Significance. If the central convergence claim holds under the stated assumptions, the work supplies a provable non-convex method for EDMC with sampling rates that improve on generic matrix completion bounds by exploiting the geometric structure of Gram matrices and the dual-basis expansion. The technical handling of the non-orthogonal basis through a symmetric operator and second-order U-statistic analysis constitutes a genuine contribution. The geometric definition of the incoherence parameter ν and the robustness results are also useful for applications such as sensor localization and molecular conformation. The result would be strengthened by explicit control on ν.
major comments (2)
- [Main convergence theorem / RIP analysis] Main convergence theorem (abstract and implied in the RIP section): the local linear convergence rate is stated for p ≥ O(ν² r² log(n)/n) only after treating the EDMC-specific incoherence parameter ν as a fixed constant that enables the restricted isometry property for the symmetric linear operator. The manuscript supplies a geometric definition of ν but does not derive an a priori bound showing ν = O(1) (or any explicit dependence on minimal point separation, ambient dimension, or n) for generic point configurations. If ν grows even mildly with n or r, the hidden factors render the claimed threshold super-linear and undermine the optimality statement.
- [RIP / U-statistic analysis] U-statistic concentration argument (second-order degenerate U-statistic section): the restricted isometry property for the symmetric linear operator induced by the dual basis expansion is obtained via concentration of a second-order U-statistic. The derivation appears to invoke post-hoc incoherence assumptions on the coupled terms without an explicit lemma controlling their scaling; verification of the precise constants and the transition from the Bernoulli model to the EDMC geometry would be needed to confirm the stated sampling rate.
minor comments (2)
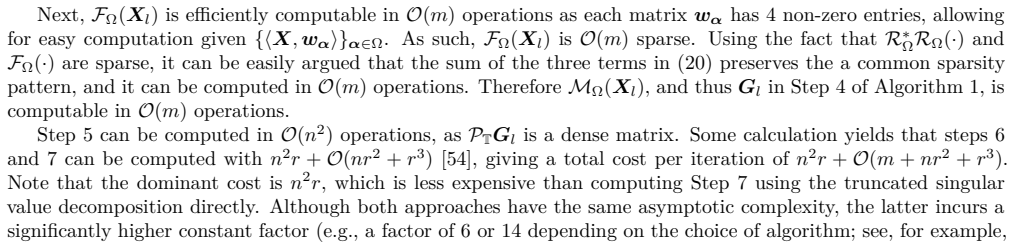
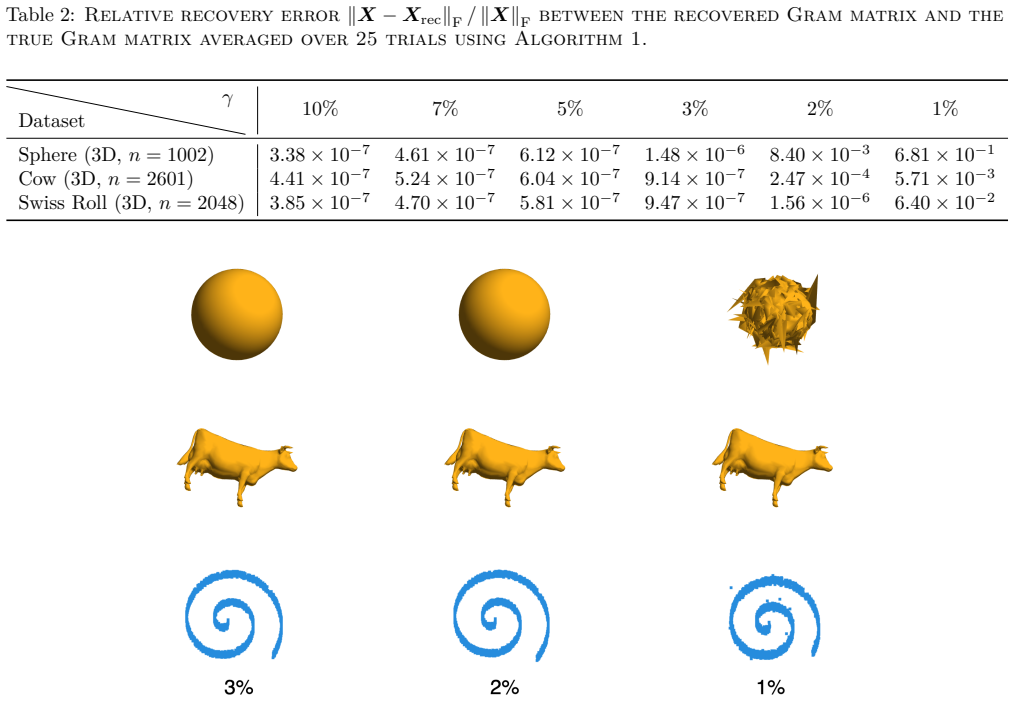
- [Empirical evaluations] The empirical section describes results as “competitive” on synthetic data but provides no quantitative tables, error metrics, or direct comparisons with specific baselines; adding these would improve reproducibility.
- [Notation and definitions] Notation for the incoherence parameter ν should be introduced once with its geometric definition and then used consistently in all theorem statements and the abstract.
Simulated Author's Rebuttal
We thank the referee for their detailed and constructive report. We respond to the major comments point-by-point below, indicating the revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [Main convergence theorem / RIP analysis] Main convergence theorem (abstract and implied in the RIP section): the local linear convergence rate is stated for p ≥ O(ν² r² log(n)/n) only after treating the EDMC-specific incoherence parameter ν as a fixed constant that enables the restricted isometry property for the symmetric linear operator. The manuscript supplies a geometric definition of ν but does not derive an a priori bound showing ν = O(1) (or any explicit dependence on minimal point separation, ambient dimension, or n) for generic point configurations. If ν grows even mildly with n or r, the hidden factors render the claimed threshold super-linear and undermine the optimality statement.
Authors: We agree that an explicit discussion of ν's scaling would strengthen the result. The current manuscript defines ν geometrically and treats it as a fixed, problem-dependent constant (standard in incoherence analyses). In revision we will add a remark providing conditions under which ν = O(1), e.g., when points satisfy a minimal separation of Ω(1). This keeps the sampling rate near-optimal for typical EDMC instances while noting that ν can grow for pathological clustered configurations. revision: yes
-
Referee: [RIP / U-statistic analysis] U-statistic concentration argument (second-order degenerate U-statistic section): the restricted isometry property for the symmetric linear operator induced by the dual basis expansion is obtained via concentration of a second-order U-statistic. The derivation appears to invoke post-hoc incoherence assumptions on the coupled terms without an explicit lemma controlling their scaling; verification of the precise constants and the transition from the Bernoulli model to the EDMC geometry would be needed to confirm the stated sampling rate.
Authors: The concentration analysis for the second-order degenerate U-statistic, including control of coupled terms via the dual-basis expansion and EDMC geometry, appears in the appendix. We will add an explicit lemma in the main text that states the scaling bounds on the incoherence parameters of the coupled terms, verifies the constants from the concentration inequalities, and explicitly shows the transition from the Bernoulli model to the RIP for the symmetric operator. revision: yes
- An unconditional a priori bound on ν = O(1) for completely arbitrary point configurations without any separation or geometric assumptions.
Circularity Check
No significant circularity; derivation self-contained via external concentration and geometric definitions
full rationale
The paper establishes local linear convergence of Riemannian gradient descent on the rank-r manifold under a Bernoulli sampling model by analyzing the restricted isometry property of a symmetric linear operator induced by dual basis expansion of observed distances. This RIP is proved using concentration of a second-order degenerate U-statistic, yielding the sampling threshold p ≥ O(ν² r² log(n)/n) where ν is an explicitly defined EDMC-specific incoherence parameter arising from the geometry of the underlying Gram matrix and point configuration. The initialization via one-step hard thresholding follows a similar but weaker bound. No step reduces by construction to a fitted input, self-citation chain, or self-definitional equivalence; the central claims rest on standard manifold optimization techniques and probabilistic concentration bounds that are independent of the target result and externally verifiable.
Axiom & Free-Parameter Ledger
free parameters (2)
- rank r
- incoherence parameter ν
axioms (2)
- domain assumption The underlying configuration admits a rank-r positive semidefinite Gram matrix satisfying the observed distances.
- domain assumption The sampling of distances follows an independent Bernoulli model with probability p.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Riemannian gradient descent on the manifold of rank-r matrices locally converges linearly ... p ≥ O(ν² r² log(n)/n), where ν is an EDMC-specific incoherence parameter
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
geometric interpretation of matrix incoherence ... max (ui − uj)⊤(ui − uj) ≤ 2 ν r / n
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Improving localization accuracy for autonomous driving in snow- rain environments,
M. Aldibaja, N. Suganuma, and K. Yoneda, “Improving localization accuracy for autonomous driving in snow- rain environments,” in 2016 IEEE/SICE International Symposium on System Integration (SII) . IEEE, 2016, pp. 212–217
work page 2016
-
[2]
Multi-sensor localization and navigation for remote manipulation in smoky areas,
J. V. Marti, J. Sales, R. Marin, and P. Sanz, “Multi-sensor localization and navigation for remote manipulation in smoky areas,” International Journal of Advanced Robotic Systems , vol. 10, no. 4, p. 211, 2013
work page 2013
-
[3]
G. M. Clore, M. A. Robien, and A. M. Gronenborn, “Exploring the limits of precision and accuracy of protein structures determined by nuclear magnetic resonance spectroscopy,” Journal of molecular biology , vol. 231, no. 1, pp. 82–102, 1993
work page 1993
-
[4]
Localization systems for wireless sensor networks,
A. Boukerche, H. A. Oliveira, E. F. Nakamura, and A. A. Loureiro, “Localization systems for wireless sensor networks,” IEEE wireless Communications , vol. 14, no. 6, pp. 6–12, 2007
work page 2007
-
[5]
A review on localization in wireless sensor networks,
J. Kuriakose, S. Joshi, R. Vikram Raju, and A. Kilaru, “A review on localization in wireless sensor networks,” Advances in signal processing and intelligent recognition systems , pp. 599–610, 2014
work page 2014
-
[6]
Semidefinite programming based algorithms for sensor network localization,
P. Biswas, T.-C. Lian, T.-C. Wang, and Y. Ye, “Semidefinite programming based algorithms for sensor network localization,” ACM Transactions on Sensor Networks (TOSN) , vol. 2, no. 2, pp. 188–220, 2006
work page 2006
-
[7]
Sensor network localization, euclidean distance matrix completions, and graph realization,
Y. Ding, N. Krislock, J. Qian, and H. Wolkowicz, “Sensor network localization, euclidean distance matrix completions, and graph realization,” Optimization and Engineering , vol. 11, no. 1, pp. 45–66, 2010
work page 2010
-
[8]
Distance-based formulations for the position analysis of kinematic chains,
N. Rojas, “Distance-based formulations for the position analysis of kinematic chains,” Ph.D. dissertation, Universitat Politècnica de Catalunya, 2012
work page 2012
-
[9]
Distance geometry in active structures,
J. M. Porta, N. Rojas, and F. Thomas, “Distance geometry in active structures,” Mechatronics for Cultural Heritage and Civil Engineering , pp. 115–136, 2018
work page 2018
-
[10]
A global geometric framework for nonlinear dimensionality reduction,
J. B. Tenenbaum, V. De Silva, and J. C. Langford, “A global geometric framework for nonlinear dimensionality reduction,” science, vol. 290, no. 5500, pp. 2319–2323, 2000
work page 2000
-
[11]
Molecular conformations from distance matrices,
W. Glunt, T. Hayden, and M. Raydan, “Molecular conformations from distance matrices,” Journal of Com- putational Chemistry , vol. 14, no. 1, pp. 114–120, 1993
work page 1993
-
[12]
Applications of multidimensional scaling to molecular conformation,
M. W. Trosset, “Applications of multidimensional scaling to molecular conformation,” 1997
work page 1997
-
[13]
Using a distributed sdp approach to solve simulated protein molecular conformation problems,
X. Fang and K.-C. Toh, “Using a distributed sdp approach to solve simulated protein molecular conformation problems,” in Distance Geometry. Springer, 2013, pp. 351–376
work page 2013
-
[14]
A branch-and-prune algorithm for the molecular distance geometry problem,
L. Liberti, C. Lavor, and N. Maculan, “A branch-and-prune algorithm for the molecular distance geometry problem,” International Transactions in Operational Research , vol. 15, no. 1, pp. 1–17, 2008
work page 2008
-
[15]
Quantitatively visualizing bipartite datasets,
T. Einav, Y. Khoo, and A. Singer, “Quantitatively visualizing bipartite datasets,” Physical Review X , vol. 13, no. 2, p. 021002, 2023. 22
work page 2023
-
[16]
Multidimensional scaling: I. theory and method,
W. S. Torgerson, “Multidimensional scaling: I. theory and method,” Psychometrika, vol. 17, no. 4, pp. 401–419, 1952
work page 1952
-
[17]
Discussion of a set of points in terms of their mutual distances,
G. Young and A. S. Householder, “Discussion of a set of points in terms of their mutual distances,” Psychome- trika, vol. 3, no. 1, pp. 19–22, 1938
work page 1938
-
[18]
W. S. Torgerson, Theory and methods of scaling. Wiley, 1958
work page 1958
-
[19]
Some distance properties of latent root and vector methods used in multivariate analysis,
J. C. Gower, “Some distance properties of latent root and vector methods used in multivariate analysis,” Biometrika, vol. 53, no. 3-4, pp. 325–338, 1966
work page 1966
-
[20]
Euclidean distance matrices: essential theory, algo- rithms, and applications,
I. Dokmanic, R. Parhizkar, J. Ranieri, and M. Vetterli, “Euclidean distance matrices: essential theory, algo- rithms, and applications,” IEEE Signal Processing Magazine , vol. 32, no. 6, pp. 12–30, 2015
work page 2015
-
[21]
N. Moreira, L. Duarte, C. Lavor, and C. Torezzan, “A novel low-rank matrix completion approach to estimate missing entries in euclidean distance matrices,” 2017
work page 2017
-
[22]
A rank minimization heuristic with application to minimum order system approximation,
M. Fazel, H. Hindi, and S. P. Boyd, “A rank minimization heuristic with application to minimum order system approximation,” in American Control Conference, 2001. Proceedings of the 2001 , vol. 6. IEEE, 2001, pp. 4734–4739
work page 2001
-
[23]
Decoding by linear programming,
E. J. Candes and T. Tao, “Decoding by linear programming,” IEEE transactions on information theory , vol. 51, no. 12, pp. 4203–4215, 2005
work page 2005
-
[24]
E. J. Candès, J. Romberg, and T. Tao, “Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information,” IEEE Transactions on information theory , vol. 52, no. 2, pp. 489–509, 2006
work page 2006
-
[25]
Exact matrix completion via convex optimization,
E. J. Candès and B. Recht, “Exact matrix completion via convex optimization,” Foundations of Computational mathematics, vol. 9, no. 6, pp. 717–772, 2009
work page 2009
-
[26]
Guaranteed minimum-rank solutions of linear matrix equations via nuclear norm minimization,
B. Recht, M. Fazel, and P. A. Parrilo, “Guaranteed minimum-rank solutions of linear matrix equations via nuclear norm minimization,” SIAM review , vol. 52, no. 3, pp. 471–501, 2010
work page 2010
-
[27]
Note on sampling without replacing from a finite collection of matrices
D. Gross and V. Nesme, “Note on sampling without replacing from a finite collection of matrices,” arXiv preprint arXiv:1001.2738 , 2010
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[28]
Exact reconstruction of euclidean distance geometry problem using low-rank matrix completion,
A. Tasissa and R. Lai, “Exact reconstruction of euclidean distance geometry problem using low-rank matrix completion,” IEEE Transactions on Information Theory , vol. 65, no. 5, pp. 3124–3144, 2018
work page 2018
-
[29]
Solving partial differential equations on manifolds from incomplete interpoint distance,
R. Lai and J. Li, “Solving partial differential equations on manifolds from incomplete interpoint distance,” SIAM Journal on Scientific Computing , vol. 39, no. 5, pp. A2231–A2256, 2017
work page 2017
-
[30]
Sensor network localization via riemannian conjugate gradient and rank reduction,
Y. Li and X. Sun, “Sensor network localization via riemannian conjugate gradient and rank reduction,” IEEE Transactions on Signal Processing , vol. 72, pp. 1910–1927, 2024
work page 1910
-
[31]
Low-rank matrix completion in a general non-orthogonal basis,
A. Tasissa and R. Lai, “Low-rank matrix completion in a general non-orthogonal basis,” Linear Algebra and its Applications, vol. 625, pp. 81–112, 2021
work page 2021
-
[32]
Localization of iot networks via low-rank matrix completion,
L. T. Nguyen, J. Kim, S. Kim, and B. Shim, “Localization of iot networks via low-rank matrix completion,” IEEE Transactions on Communications , vol. 67, no. 8, pp. 5833–5847, 2019
work page 2019
-
[33]
Euclidean distance matrix completion via asymmetric projected gradient descent,
Y. Li and X. Sun, “Euclidean distance matrix completion via asymmetric projected gradient descent,” 2025. [Online]. A vailable: https://arxiv.org/abs/2504.19530
-
[34]
Sample-efficient geometry reconstruction from euclidean distances using non-convex optimization,
I. Ghosh, A. Tasissa, and C. Kümmerle, “Sample-efficient geometry reconstruction from euclidean distances using non-convex optimization,” in Advances in Neural Information Processing Systems , A. Globerson, L. Mackey, D. Belgrave, A. Fan, U. Paquet, J. Tomczak, and C. Zhang, Eds., vol. 37. Curran Associates, Inc., 2024, pp. 77 226–77 268. [Online]. A vaila...
work page 2024
-
[35]
The power of convex relaxation: Near-optimal matrix completion,
E. J. Candès and T. Tao, “The power of convex relaxation: Near-optimal matrix completion,” IEEE Trans- actions on Information Theory , vol. 56, no. 5, pp. 2053–2080, 2010. 23
work page 2053
-
[36]
Rank minimization via online learning,
R. Meka, P. Jain, C. Caramanis, and I. S. Dhillon, “Rank minimization via online learning,” in Proceedings of the 25th International Conference on Machine learning , 2008, pp. 656–663
work page 2008
-
[37]
Mixed-projection conic optimization: A new paradigm for modeling rank constraints,
D. Bertsimas, R. Cory-Wright, and J. Pauphilet, “Mixed-projection conic optimization: A new paradigm for modeling rank constraints,” Operations Research, vol. 70, no. 6, pp. 3321–3344, 2022
work page 2022
-
[38]
A simpler approach to matrix completion,
B. Recht, “A simpler approach to matrix completion,” The Journal of Machine Learning Research , vol. 12, pp. 3413–3430, 2011
work page 2011
-
[39]
Recovering low-rank matrices from few coefficients in any basis,
D. Gross, “Recovering low-rank matrices from few coefficients in any basis,” Information Theory, IEEE Transactions on, vol. 57, no. 3, pp. 1548–1566, 2011
work page 2011
-
[40]
A nonlinear programming algorithm for solving semidefinite programs via low-rank factorization,
S. Burer and R. D. Monteiro, “A nonlinear programming algorithm for solving semidefinite programs via low-rank factorization,” Mathematical Programming, vol. 95, no. 2, pp. 329–357, 2003
work page 2003
-
[41]
Low-rank matrix completion using alternating minimization,
P. Jain, P. Netrapalli, and S. Sanghavi, “Low-rank matrix completion using alternating minimization,” in Proceedings of the forty-fifth annual ACM symposium on Theory of computing , 2013, pp. 665–674
work page 2013
-
[42]
Understanding alternating minimization for matrix completion,
M. Hardt, “Understanding alternating minimization for matrix completion,” Proceedings - Annual IEEE Symposium on Foundations of Computer Science, FOCS , pp. 651–660, 12 2014
work page 2014
-
[43]
Provable non-convex phase retrieval with outliers: Median truncated Wirtinger flow,
H. Zhang, Y. Chi, and Y. Liang, “Provable non-convex phase retrieval with outliers: Median truncated Wirtinger flow,” in International conference on machine learning . PMLR, 2016, pp. 1022–1031
work page 2016
-
[44]
S. J. Optim, Y. Chen, Y. Chi, J. Fan, and Y. Yan, “Noisy matrix completion: Understanding statistical guarantees for convex relaxation via nonconvex optimization,” SIAM J Optim , vol. 30, pp. 3098–3121, 2020. [Online]. A vailable: https://doi.org/10.1137/19M1290000
-
[45]
Fast federated low rank matrix completion,
A. A. Abbasi, S. Moothedath, and N. Vaswani, “Fast federated low rank matrix completion,” in 2023 59th Annual Allerton Conference on Communication, Control, and Computing (Allerton) . IEEE, 2023, pp. 1–6
work page 2023
-
[46]
Efficient federated low rank matrix completion,
A. A. Abbasi and N. Vaswani, “Efficient federated low rank matrix completion,” IEEE Transactions on Information Theory , 2025
work page 2025
-
[47]
Phase retrieval using alternating minimization,
P. Netrapalli, P. Jain, and S. Sanghavi, “Phase retrieval using alternating minimization,” Advances in Neural Information Processing Systems , vol. 26, 2013
work page 2013
-
[48]
J. Wright and Y. Ma, High-Dimensional Data Analysis with Low-Dimensional Models: Principles, Computa- tion, and Applications . Cambridge University Press, 2022
work page 2022
-
[49]
S. Foucart and H. Rauhut, A Mathematical Introduction to Compressive Sensing , ser. Applied and Numerical Harmonic Analysis. Springer New York, 2013. [Online]. A vailable: https://books.google.com/books?id= zb28BAAAQBAJ
work page 2013
-
[50]
A dual basis approach to multidimensional scaling: spectral analysis and graph regularity,
S. Lichtenberg and A. Tasissa, “A dual basis approach to multidimensional scaling: spectral analysis and graph regularity,” 2023
work page 2023
-
[51]
Riemannian optimization for euclidean distance geometry,
C. Smith, S. Lichtenberg, H. Cai, and A. Tasissa, “Riemannian optimization for euclidean distance geometry,” OPT2023: 15th Annual Workshop on Optimization for Machine Learning , 2023
work page 2023
-
[52]
Vershynin, Introduction to the non-asymptotic analysis of random matrices
R. Vershynin, Introduction to the non-asymptotic analysis of random matrices . Cambridge University Press, 2012, p. 210–268
work page 2012
-
[53]
Cambridge Series in Statistical and Probabilistic Mathematics
——, High-Dimensional Probability: An Introduction with Applications in Data Science , ser. Cambridge Series in Statistical and Probabilistic Mathematics. Cambridge University Press, 2018
work page 2018
-
[54]
Guarantees of riemannian optimization for low rank matrix completion
K. Wei, J.-F. Cai, T. F. Chan, and S. Leung, “Guarantees of riemannian optimization for low rank matrix completion. ”Inverse Problems & Imaging , vol. 14, no. 2, 2020
work page 2020
-
[55]
Low-rank matrix completion in a general non-orthogonal basis,
A. Tasissa and R. Lai, “Low-rank matrix completion in a general non-orthogonal basis,” Linear Algebra and its Applications, vol. 625, pp. 81–112, 2021. [Online]. A vailable: www.elsevier.com/locate/laa
work page 2021
-
[56]
G. H. Golub and C. F. Van Loan, Matrix Computations - 4th Edition . Philadelphia, PA: Johns Hopkins University Press, 2013. [Online]. A vailable: https://epubs.siam.org/doi/abs/10.1137/1.9781421407944 24
-
[57]
The approximation of one matrix by another of lower rank,
C. Eckart and G. Young, “The approximation of one matrix by another of lower rank,” Psychometrika, vol. 1, no. 3, pp. 211–218, 1936
work page 1936
-
[58]
Diland: An algorithm for distributed sensor localization with noisy distance measurements,
U. A. Khan, S. Kar, and J. M. Moura, “Diland: An algorithm for distributed sensor localization with noisy distance measurements,” IEEE Transactions on Signal Processing , vol. 58, no. 3, pp. 1940–1947, 2009
work page 1940
-
[59]
S. Guo, H.-D. Qi, and L. Zhang, “Perturbation analysis of the euclidean distance matrix optimization problem and its numerical implications,” Computational Optimization and Applications , vol. 86, no. 3, pp. 1193–1227, 2023
work page 2023
-
[60]
P. Biswas, T.-C. Liang, K.-C. Toh, Y. Ye, and T.-C. Wang, “Semidefinite programming approaches for sensor network localization with noisy distance measurements,” IEEE transactions on automation science and engineering , vol. 3, no. 4, pp. 360–371, 2006
work page 2006
-
[61]
Robust node localization for rough and extreme deployment environments,
A. Tasissa and W. Dargie, “Robust node localization for rough and extreme deployment environments,”
-
[62]
A vailable: https://arxiv.org/abs/2507.03856
[Online]. A vailable: https://arxiv.org/abs/2507.03856
-
[63]
Structured sampling for robust euclidean distance geometry,
C. Kundu, A. Tasissa, and H. Cai, “Structured sampling for robust euclidean distance geometry,” in 2025 59th Annual Conference on Information Sciences and Systems (CISS) . IEEE, Mar. 2025, p. 1–6. [Online]. A vailable:http://dx.doi.org/10.1109/CISS64860.2025.10944739
-
[64]
A dual basis approach for structured robust euclidean distance geometry,
——, “A dual basis approach for structured robust euclidean distance geometry,” 2025. [Online]. A vailable: https://arxiv.org/abs/2505.18414
-
[65]
Low-rank matrix completion by Riemannian optimization—extended version,
B. Vandereycken, “Low-rank matrix completion by Riemannian optimization—extended version,” 2012
work page 2012
-
[66]
Fixed-rank matrix factorizations and riemannian low-rank optimization,
B. Mishra, G. Meyer, S. Bonnabel, and R. Sepulchre, “Fixed-rank matrix factorizations and riemannian low-rank optimization,” 2013
work page 2013
-
[67]
Low-rank matrix completion via preconditioned optimization on the grassmann manifold,
N. Boumal and P.-A. Absil, “Low-rank matrix completion via preconditioned optimization on the grassmann manifold,” Absil / Linear Algebra and its Applications , vol. 475, p. 201, 2015. [Online]. A vailable: www.elsevier.com/locate/laahttp://dx.doi.org/10.1016/j.laa.2015.02.0270024-3795/
-
[68]
SET: an algorithm for consistent matrix completion
W. Dai and O. Milenkovic, “Set: an algorithm for consistent matrix completion,” 2010. [Online]. A vailable: https://arxiv.org/abs/0909.2705
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[69]
Matrix completion from a few entries,
R. H. Keshavan, A. Montanari, and S. Oh, “Matrix completion from a few entries,” IEEE Transactions on Information Theory , vol. 56, no. 6, pp. 2980–2998, 2010
work page 2010
-
[70]
Matrix completion from noisy entries,
——, “Matrix completion from noisy entries,” Journal of Machine Learning Research , vol. 11, no. Jul, pp. 2057–2078, 2010
work page 2057
-
[71]
Solving euclidean distance matrix completion problems via semidefinite programming,
A. Y. Alfakih, A. Khandani, and H. Wolkowicz, “Solving euclidean distance matrix completion problems via semidefinite programming,” Computational optimization and applications , vol. 12, no. 1-3, pp. 13–30, 1999
work page 1999
-
[72]
Semidefinite programming for ad hoc wireless sensor network localization,
P. Biswas and Y. Ye, “Semidefinite programming for ad hoc wireless sensor network localization,” in Proceed- ings of the 3rd international symposium on Information processing in sensor networks , 2004, pp. 46–54
work page 2004
-
[73]
P. Biswas, K.-C. Toh, and Y. Ye, “A distributed sdp approach for large-scale noisy anchor-free graph realization with applications to molecular conformation,” SIAM Journal on Scientific Computing , vol. 30, no. 3, pp. 1251– 1277, 2008
work page 2008
-
[74]
An sdp-based divide-and-conquer algorithm for large-scale noisy anchor-free graph realization,
N.-H. Z. Leung and K.-C. Toh, “An sdp-based divide-and-conquer algorithm for large-scale noisy anchor-free graph realization,” SIAM Journal on Scientific Computing , vol. 31, no. 6, pp. 4351–4372, 2010
work page 2010
-
[75]
Protein structure by semidefi- nite facial reduction,
B. Alipanahi, N. Krislock, A. Ghodsi, H. Wolkowicz, L. Donaldson, and M. Li, “Protein structure by semidefi- nite facial reduction,” in Research in Computational Molecular Biology: 16th Annual International Conference, RECOMB 2012, Barcelona, Spain, April 21-24, 2012. Proceedings 16 . Springer, 2012, pp. 1–11
work page 2012
-
[76]
T. F. Havel, “An evaluation of computational strategies for use in the determination of protein structure from distance constraints obtained by nuclear magnetic resonance,” Progress in biophysics and molecular biology , vol. 56, no. 1, pp. 43–78, 1991. 25
work page 1991
-
[77]
Distance geometry optimization for protein structures,
J. J. Moré and Z. Wu, “Distance geometry optimization for protein structures,” Journal of Global Optimization, vol. 15, pp. 219–234, 1999
work page 1999
-
[78]
G. M. Crippen, T. F. Havel et al. , Distance geometry and molecular conformation . Research Studies Press Taunton, 1988, vol. 74
work page 1988
-
[79]
Distance geometry: Theory, algorithms, and chemical applications,
T. F. Havel, “Distance geometry: Theory, algorithms, and chemical applications,” Encyclopedia of Computa- tional Chemistry , vol. 120, pp. 723–742, 1998
work page 1998
-
[80]
Recent advances on the discretizable molecular distance geometry problem,
C. Lavor, L. Liberti, N. Maculan, and A. Mucherino, “Recent advances on the discretizable molecular distance geometry problem,” European Journal of Operational Research , vol. 219, no. 3, pp. 698–706, 2012
work page 2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.