Before Humans Join the Team: Diagnosing Coordination Failures in Healthcare Robot Team Simulation
Pith reviewed 2026-05-18 23:53 UTC · model grok-4.3
The pith
Team structure creates the main coordination bottlenecks in robot teams, more than knowledge or model ability, while trading off autonomy against stability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
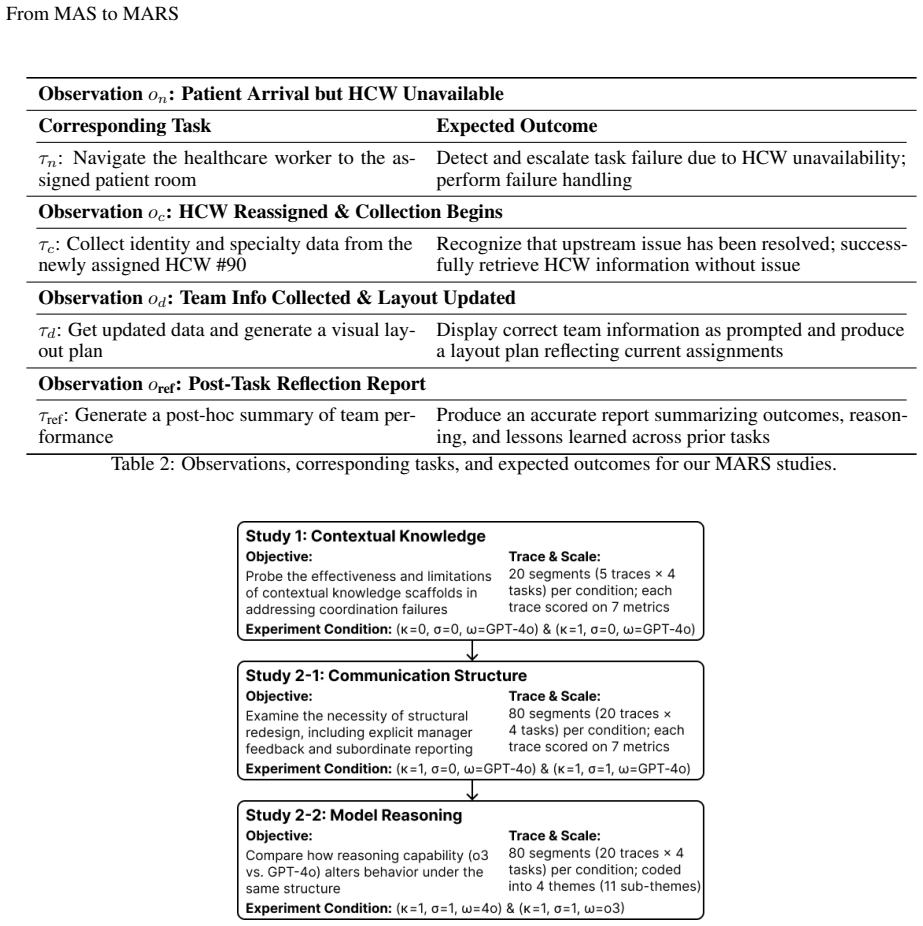
Using LLM agents to simulate all positions in a healthcare robot team, including the supervisory manager, two studies with different hierarchical configurations reveal that team structure rather than contextual knowledge or model capability is the primary bottleneck for coordination. The work exposes a tension between reasoning autonomy and system stability. Surfacing these failures in simulation prepares the ground for safe human integration into robot teams.
What carries the argument
LLM-agent based simulation of hierarchical healthcare robot teams to diagnose coordination behaviors and failure patterns under varying team structures.
If this is right
- Varying team hierarchies produces distinct coordination success and failure patterns.
- Adding more contextual knowledge does not resolve issues rooted in team structure.
- Increased reasoning autonomy in agents tends to decrease system stability.
- Simulation-based diagnosis allows identification of coordination issues prior to human participation in the team.
Where Pith is reading between the lines
- The simulation approach could extend to other high-stakes domains to test team designs before deployment.
- Real hardware tests might show whether the observed autonomy-stability tension persists beyond software agents.
- Designing transparent coordination protocols based on these structure findings could improve resilience in mixed human-robot teams.
Load-bearing premise
That the coordination behaviors and failure modes seen in LLM-agent simulations will generalize to real robotic hardware and human team members in healthcare environments.
What would settle it
Running the same scenarios on physical robots with different team structures and checking if the coordination failure patterns match those from the simulations.
Figures
read the original abstract
As humans move toward collaborating with coordinated robot teams, understanding how these teams coordinate and fail is essential for building trust and ensuring safety. However, exposing human collaborators to coordination failures during early-stage development is costly and risky, particularly in high-stakes domains such as healthcare. We adopt an agent-simulation approach in which all team roles, including the supervisory manager, are instantiated as LLM agents, allowing us to diagnose coordination failures before humans join the team. Using a controllable healthcare scenario, we conduct two studies with different hierarchical configurations to analyze coordination behaviors and failure patterns. Our findings reveal that team structure, rather than contextual knowledge or model capability, constitutes the primary bottleneck for coordination, and expose a tension between reasoning autonomy and system stability. By surfacing these failures in simulation, we prepare the groundwork for safe human integration. These findings inform the design of resilient robot teams with implications for process-level evaluation, transparent coordination protocols, and structured human integration. Supplementary materials, including codes, task agent setup, trace outputs, and annotated examples of coordination failures and reasoning behaviors, are available at: https://byc-sophie.github.io/mas-to-mars/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an LLM-agent simulation framework to diagnose coordination failures in healthcare robot teams prior to human involvement. All roles, including the supervisory manager, are instantiated as LLM agents in a controllable healthcare scenario. Two studies examine different hierarchical team configurations to analyze coordination behaviors and failure patterns. The central claims are that team structure (rather than contextual knowledge or model capability) is the primary bottleneck for coordination and that a tension exists between reasoning autonomy and system stability. Supplementary code, traces, and annotated failure examples are provided to support safer human-robot team integration.
Significance. If the findings are substantiated, the work offers a practical simulation-based method for early identification of coordination risks in high-stakes multi-robot systems, with potential value for process-level evaluation and human integration protocols in healthcare robotics. The open release of code and trace outputs supports reproducibility, which is a positive contribution. However, the absence of quantitative metrics and controlled comparisons currently limits the strength and generalizability of the conclusions.
major comments (2)
- [Abstract and Studies] Abstract and Studies sections: The claim that 'team structure, rather than contextual knowledge or model capability, constitutes the primary bottleneck for coordination' lacks direct comparative evidence. The two studies alter only hierarchical configurations; no conditions are reported that hold structure fixed while varying prompt context depth, knowledge injection, or backbone model (e.g., GPT-4 vs. smaller models). Without these ablations, the ranking of bottlenecks rests on the untested assumption that other factors were already near-optimal.
- [Abstract and Results] Abstract and Results: The manuscript states clear findings on coordination failures and the autonomy-stability tension but supplies no quantitative metrics, statistical tests, baseline comparisons, or details on how failures were coded and quantified. This prevents verification of whether the observed patterns support the central claims.
minor comments (2)
- [Methods] Ensure that all LLM prompts, agent role definitions, and failure annotation criteria are fully specified in the main text or supplementary materials for replicability.
- [Scenario Description] Clarify the exact healthcare scenario tasks and success/failure criteria used in the simulations.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. The comments highlight important opportunities to strengthen the evidential basis for our claims. We address each major comment below and will incorporate revisions to improve quantitative support and comparative analysis while preserving the exploratory nature of the simulation framework.
read point-by-point responses
-
Referee: [Abstract and Studies] Abstract and Studies sections: The claim that 'team structure, rather than contextual knowledge or model capability, constitutes the primary bottleneck for coordination' lacks direct comparative evidence. The two studies alter only hierarchical configurations; no conditions are reported that hold structure fixed while varying prompt context depth, knowledge injection, or backbone model (e.g., GPT-4 vs. smaller models). Without these ablations, the ranking of bottlenecks rests on the untested assumption that other factors were already near-optimal.
Authors: We agree that explicit ablations would provide stronger support for ranking the bottlenecks. In the reported studies the backbone model and base prompt context were deliberately held constant across all hierarchical conditions precisely to isolate the effect of team structure; the consistent emergence of structure-specific failure patterns under these fixed conditions is what grounds our claim. To directly address the concern we will add a limited ablation in the revised manuscript comparing performance under the same hierarchy with GPT-4 versus a smaller model (GPT-3.5-turbo) and with an enriched versus baseline context prompt, reporting the resulting coordination outcomes. revision: yes
-
Referee: [Abstract and Results] Abstract and Results: The manuscript states clear findings on coordination failures and the autonomy-stability tension but supplies no quantitative metrics, statistical tests, baseline comparisons, or details on how failures were coded and quantified. This prevents verification of whether the observed patterns support the central claims.
Authors: We accept that the absence of quantitative summaries limits immediate verifiability. The current work is exploratory and centers on qualitative trace analysis with annotated failure examples supplied in the supplementary materials. In revision we will add a new subsection in Results that reports (i) the proportion of simulation runs exhibiting each major failure category, (ii) a simple coordination-success score per hierarchy, and (iii) the inter-annotator agreement for the failure-coding scheme. These additions will be accompanied by a brief description of the coding protocol without altering the primary qualitative emphasis of the studies. revision: yes
Circularity Check
No significant circularity: findings emerge from direct simulation observations rather than reduction to inputs.
full rationale
The paper derives its claims about team structure as the primary coordination bottleneck through two simulation studies that instantiate LLM agents in varying hierarchical healthcare scenarios and directly observe failure patterns and autonomy-stability tensions in the generated traces. No load-bearing steps reduce by construction to fitted parameters, self-definitions, or self-citation chains; the results are presented as empirical outputs from the agent interactions themselves, with supplementary code and traces provided for reproducibility. This constitutes a self-contained observational analysis without the enumerated circular patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption LLM agents instantiated as team roles can produce coordination behaviors and failures representative of actual robotic systems
Reference graph
Works this paper leans on
-
[1]
A survey on llm-based multi-agent systems: workflow, infrastructure, and challenges
Xinyi Li, Sai Wang, Siqi Zeng, Yu Wu, and Yi Yang. A survey on llm-based multi-agent systems: workflow, infrastructure, and challenges. Vicinagearth, 1(1):9, 2024
work page 2024
-
[2]
ChatDev: Communicative Agents for Software Development, June 2024
Chen Qian, Wei Liu, Hongzhang Liu, Nuo Chen, Yufan Dang, Jiahao Li, Cheng Yang, Weize Chen, Yusheng Su, Xin Cong, Juyuan Xu, Dahai Li, Zhiyuan Liu, and Maosong Sun. ChatDev: Communicative Agents for Software Development, June 2024
work page 2024
-
[3]
Yilun Du, Shuang Li, Antonio Torralba, Joshua B. Tenenbaum, and Igor Mordatch. Improving Factuality and Reasoning in Language Models through Multiagent Debate, May 2023
work page 2023
-
[4]
Khanh-Tung Tran, Dung Dao, Minh-Duong Nguyen, Quoc-Viet Pham, Barry O’Sullivan, and Hoang D. Nguyen. Multi-Agent Collaboration Mechanisms: A Survey of LLMs, January 2025
work page 2025
-
[5]
AutoGen: Enabling Next-Gen LLM Applications via Multi-Agent Conversation
Qingyun Wu, Gagan Bansal, Jieyu Zhang, Yiran Wu, Beibin Li, Erkang Zhu, Li Jiang, Xiaoyun Zhang, Shaokun Zhang, Jiale Liu, Ahmed Hassan Awadallah, Ryen W. White, Doug Burger, and Chi Wang. AutoGen: Enabling Next-Gen LLM Applications via Multi-Agent Conversation, October 2023. arXiv:2308.08155 [cs]
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[6]
CrewAI. Crewai. https://www.crewai.com/, 2025. Accessed: 2025-05-02
work page 2025
-
[7]
Situating robots in the emergency department
Angelique Taylor, Sachiko Matsumoto, and Laurel D Riek. Situating robots in the emergency department. In AAAI Spring Symposium on Applied AI in Healthcare: Safety, Community, and the Environment, 2020. 9 From MAS to MARS
work page 2020
-
[8]
Jen-tse Huang, Jiaxu Zhou, Tailin Jin, Xuhui Zhou, Zixi Chen, Wenxuan Wang, Youliang Yuan, Maarten Sap, and Michael R Lyu. On the resilience of multi-agent systems with malicious agents. arXiv preprint arXiv:2408.00989, 2024
-
[9]
Mert Cemri, Melissa Z. Pan, Shuyi Yang, Lakshya A. Agrawal, Bhavya Chopra, Rishabh Tiwari, Kurt Keutzer, Aditya Parameswaran, Dan Klein, Kannan Ramchandran, Matei Zaharia, Joseph E. Gonzalez, and Ion Stoica. Why Do Multi-Agent LLM Systems Fail?, April 2025
work page 2025
-
[10]
Parshin Shojaee, Iman Mirzadeh, Keivan Alizadeh, Maxwell Horton, Samy Bengio, and Mehrdad Farajtabar. The illusion of thinking: Understanding the strengths and limitations of reasoning models via the lens of problem complexity. arXiv preprint arXiv:2506.06941, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[11]
Liu, Kevin Lin, John Hewitt, Ashwin Paranjape, Michele Bevilacqua, Fabio Petroni, and Percy Liang
Ryan Liu, Jiayi Geng, Addison J Wu, Ilia Sucholutsky, Tania Lombrozo, and Thomas L Griffiths. Mind your step (by step): Chain-of-thought can reduce performance on tasks where thinking makes humans worse. arXiv preprint arXiv:2410.21333, 2024
-
[12]
Langgraph: Multi-agent workflows
LangChain. Langgraph: Multi-agent workflows. https://blog.langchain.com/ langgraph-multi-agent-workflows/ , 2025. Accessed: 2025-08-01
work page 2025
-
[13]
Autogen driven multi agent framework for iterative crime data analysis and prediction, 2025
Syeda Kisaa Fatima, Tehreem Zubair, Noman Ahmed, and Asifullah Khan. Autogen driven multi agent framework for iterative crime data analysis and prediction, 2025
work page 2025
-
[14]
Can large language models be trusted paper reviewers? a feasibility study, 2025
Chuanlei Li, Xu Hu, Minghui Xu, Kun Li, Yue Zhang, and Xiuzhen Cheng. Can large language models be trusted paper reviewers? a feasibility study, 2025
work page 2025
-
[15]
Optimizing collaboration of llm based agents for finite element analysis, 2024
Chuan Tian and Yilei Zhang. Optimizing collaboration of llm based agents for finite element analysis, 2024
work page 2024
-
[16]
Reinforce llm reasoning through multi-agent reflection, 2025
Yurun Yuan and Tengyang Xie. Reinforce llm reasoning through multi-agent reflection, 2025
work page 2025
-
[17]
Rema: Learning to meta-think for llms with multi-agent reinforcement learning, 2025
Ziyu Wan, Yunxiang Li, Xiaoyu Wen, Yan Song, Hanjing Wang, Linyi Yang, Mark Schmidt, Jun Wang, Weinan Zhang, Shuyue Hu, and Ying Wen. Rema: Learning to meta-think for llms with multi-agent reinforcement learning, 2025
work page 2025
-
[18]
Ragen: Understanding self-evolution in llm agents via multi-turn reinforcement learning, 2025
Zihan Wang, Kangrui Wang, Qineng Wang, Pingyue Zhang, Linjie Li, Zhengyuan Yang, Xing Jin, Kefan Yu, Minh Nhat Nguyen, Licheng Liu, Eli Gottlieb, Yiping Lu, Kyunghyun Cho, Jiajun Wu, Li Fei-Fei, Lijuan Wang, Yejin Choi, and Manling Li. Ragen: Understanding self-evolution in llm agents via multi-turn reinforcement learning, 2025
work page 2025
-
[19]
Naveen Krishnan. Advancing multi-agent systems through model context protocol: Architecture, implementation, and applications, 2025
work page 2025
-
[20]
Pengfei He, Yue Xing, Shen Dong, Juanhui Li, Zhenwei Dai, Xianfeng Tang, Hui Liu, Han Xu, Zhen Xiang, Charu C. Aggarwal, and Hui Liu. Comprehensive vulnerability analysis is necessary for trustworthy llm-mas, 2025
work page 2025
-
[21]
OpenAI. Gpt-4o system card. https://openai.com/index/gpt-4o-system-card/ , 2024. Accessed: 2025- 08-01
work page 2024
-
[22]
OpenAI. Gpt-4o system card. https://openai.com/index/introducing-o3-and-o4-mini/ , 2025. Ac- cessed: 2025-08-01
work page 2025
-
[23]
Discovery of grounded theory: Strategies for qualitative research
Barney Glaser and Anselm Strauss. Discovery of grounded theory: Strategies for qualitative research. Routledge, 2017. 10
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.