A Robust Approach for LiDAR-Inertial Odometry Without Sensor-Specific Modeling
Pith reviewed 2026-05-18 18:34 UTC · model grok-4.3
The pith
A LiDAR-inertial odometry system achieves robustness without sensor-specific modeling by using simplified IMU integration and scan-to-map registration with novel regularization.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
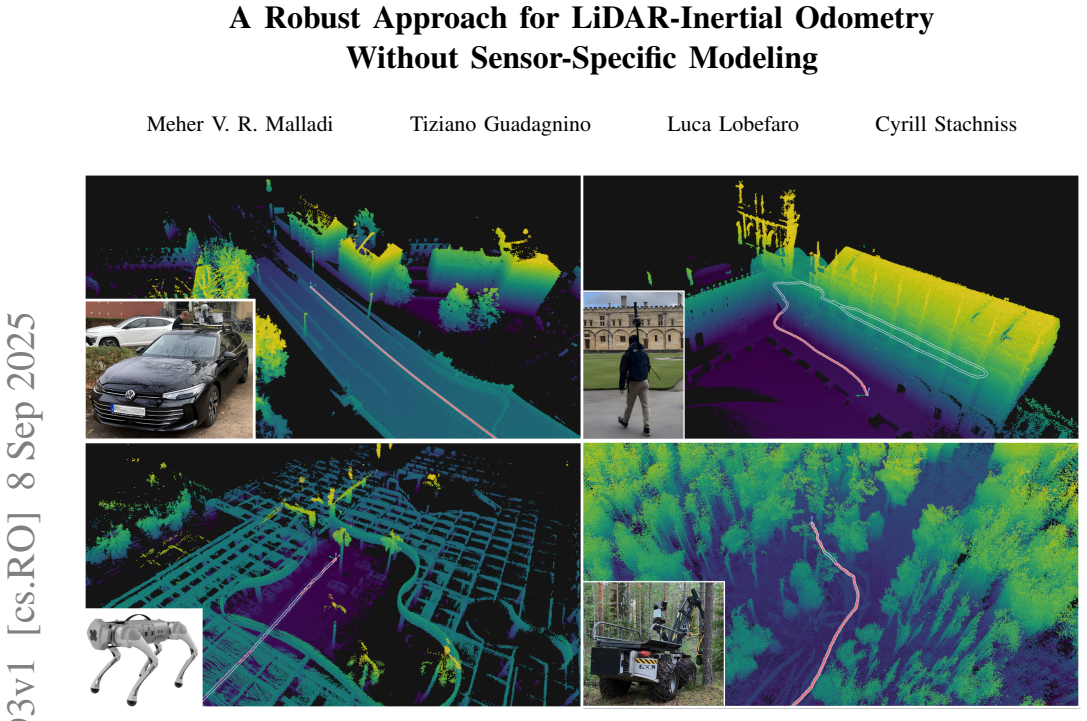
The paper claims that by using only a simplified motion model for IMU integration and performing direct scan-to-map LiDAR registration with an added novel regularization, a single configuration of the odometry system produces accurate and robust results across a wide range of sensors and environments, including solid-state LiDARs on cars in urban areas and spinning LiDARs on handheld devices in natural settings.
What carries the argument
The central mechanism is the simplified IMU motion model combined with scan-to-map registration that supports a novel regularization term to constrain the LiDAR scan matching.
If this is right
- Accurate odometry is obtained without iterative Kalman filtering or pre-integration in factor graphs.
- The same system configuration works for both urban driving and unstructured natural environments.
- Performance improves due to the regularization on LiDAR registration.
- The open-sourced code enables integration into various navigation stacks.
Where Pith is reading between the lines
- This could simplify the development of multi-sensor robotic systems by reducing the need for custom calibrations.
- The regularization technique might be adaptable to other registration-based odometry methods.
- In long-term deployments, this robustness could lead to fewer failures in changing conditions.
Load-bearing premise
The assumption that the simplified motion model and novel regularization together are sufficient to replace sensor-specific modeling and tuning while still delivering accurate odometry in all tested scenarios.
What would settle it
Observing significant drift or failure in odometry estimation on a previously untested LiDAR type or platform when using the exact same configuration would falsify the robustness without sensor-specific modeling.
Figures
read the original abstract
Accurate odometry is a critical component in a robotic navigation stack, and subsequent modules such as planning and control often rely on an estimate of the robot's motion. Sensor-based odometry approaches should be robust across sensor types and deployable in different target domains, from solid-state LiDARs mounted on cars in urban-driving scenarios to spinning LiDARs on handheld packages used in unstructured natural environments. In this paper, we propose a robust LiDAR-inertial odometry system that does not rely on sensor-specific modeling. Sensor fusion techniques for LiDAR and inertial measurement unit (IMU) data typically integrate IMU data iteratively in a Kalman filter or use pre-integration in a factor graph framework, combined with LiDAR scan matching often exploiting some form of feature extraction. We propose an alternative strategy that only requires a simplified motion model for IMU integration and directly registers LiDAR scans in a scan-to-map approach. Our approach allows us to impose a novel regularization on the LiDAR registration, improving the overall odometry performance. We detail extensive experiments on a number of datasets covering a wide array of commonly used robotic sensors and platforms. We show that our approach works with the exact same configuration in all these scenarios, demonstrating its robustness. We have open-sourced our implementation so that the community can build further on our work and use it in their navigation stacks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a robust LiDAR-inertial odometry system that uses a simplified motion model for IMU integration and direct scan-to-map registration with a novel regularization term. It claims to perform consistently across different LiDAR types (solid-state and spinning) and platforms without any sensor-specific modeling or configuration changes, supported by experiments on multiple datasets and an open-source implementation.
Significance. If the results hold, this approach could have high significance for robotics by enabling easier deployment of odometry in varied settings, reducing the need for expert tuning and sensor-specific adaptations. The multi-dataset validation with fixed parameters and open-sourcing are strengths that support reproducibility.
major comments (2)
- §4 (Method): The description of the novel regularization term in the scan-to-map registration is load-bearing for the robustness claim; however, the manuscript lacks a detailed mathematical formulation or motivation for how this term specifically compensates for the simplifications in the IMU motion model across sensor types.
- §5 (Experiments): While the paper reports consistent performance with identical configuration, the results section should include quantitative comparisons to baseline methods that use sensor-specific modeling to demonstrate the advantage, particularly in terms of accuracy metrics like ATE or RPE on each dataset.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation and recommendation of minor revision. The comments are constructive and we address each one below, indicating the changes we will make to strengthen the presentation of the method and results.
read point-by-point responses
-
Referee: §4 (Method): The description of the novel regularization term in the scan-to-map registration is load-bearing for the robustness claim; however, the manuscript lacks a detailed mathematical formulation or motivation for how this term specifically compensates for the simplifications in the IMU motion model across sensor types.
Authors: We agree that a more explicit mathematical treatment would improve clarity. In the revised manuscript we will expand the relevant subsection of §4 to include the full derivation of the regularization term together with a dedicated motivation paragraph. The added material will show how the term bounds residual errors arising from the simplified IMU integration in a manner that does not depend on LiDAR-specific characteristics, thereby supporting the sensor-agnostic claim. revision: yes
-
Referee: §5 (Experiments): While the paper reports consistent performance with identical configuration, the results section should include quantitative comparisons to baseline methods that use sensor-specific modeling to demonstrate the advantage, particularly in terms of accuracy metrics like ATE or RPE on each dataset.
Authors: We concur that direct numerical comparisons would further illustrate the practical benefit of avoiding sensor-specific modeling. In the revised §5 we will add ATE and RPE results against representative sensor-specific baselines on the same datasets, while keeping our own configuration fixed. We will also note the additional tuning effort required by the baselines to maintain fairness. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper's core contribution is an alternative LiDAR-inertial odometry pipeline that uses a simplified IMU motion model plus direct scan-to-map registration with an added regularization term. This is presented as sufficient for robust performance without sensor-specific modeling or per-platform tuning. The derivation chain consists of high-level design choices justified by the resulting empirical performance across diverse datasets and platforms (all run with identical configuration). No equations or steps are shown that reduce a claimed prediction or first-principles result back to a fitted parameter or self-referential definition by construction. The approach is self-contained against external benchmarks via open-sourced code and multi-environment validation rather than internal circularity.
Axiom & Free-Parameter Ledger
free parameters (1)
- regularization parameter
axioms (1)
- domain assumption A simplified motion model is adequate for IMU integration in the sensor fusion process.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanembed_strictMono_of_one_lt unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we assume a constant linear acceleration and angular velocity motion between successive LiDAR frames... Euler integration yields... Δp = v(t)Δt + ½aΔt², ΔR = exp([ωΔt]×)
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we set β = β₀(1 + σ_a²)... only one parameter needs to be set: the maximum expected jerk j
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
BIEVR-LIO: Robust LiDAR-Inertial Odometry through Bump-Image-Enhanced Voxel Maps
BIEVR-LIO improves robustness of LiDAR-inertial odometry by representing maps as voxel-wise oriented height images and sampling points only from geometrically informative regions.
Reference graph
Works this paper leans on
-
[1]
M. Bloesch, M. Burri, S. Omari, M. Hutter, and R. Siegwart. Iterated extended kalman filter based visual-inertial odometry using direct photometric feedback.Intl. Journal of Robotics Research (IJRR), 36(10):1053–1072, 2017
work page 2017
-
[2]
M. Bloesch, C. Gehring, P. Fankhauser, M. Hutter, M.A. Hoepflinger, and R. Siegwart. State estimation for legged robots on unstable and slippery terrain. InProc. of the IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2013
work page 2013
-
[3]
M. Brossard, A. Barrau, P. Chauchat, and S. Bonnabel. Associating uncertainty to extended poses for on lie group imu preintegration with rotating earth.IEEE Trans. on Robotics (TRO), 38(2):998–1015, 2022
work page 2022
-
[4]
-AR” denotes disabling the adaptive regularization and “-DD
K. Chen, B.T. Lopez, A.a. Agha-mohammadi, and A. Mehta. Direct lidar odometry: Fast localization with dense point clouds.IEEE Robotics and Automation Letters, 7(2):2000–2007, 2022. Method Bridge Roundabout Town Aeva Avia Aeva Avia Aeva Avia -AR 134.10 / 1.00 134.14 / 0.14 38.47 / 0.957.93/0.1345.57 / 1.06 12.54 /0.24 Ours132.77/ 0.97 133.89 / 0.14 38.54 /...
work page 2000
-
[5]
K. Chen, R. Nemiroff, and B.T. Lopez. Direct lidar-inertial odometry: Lightweight lio with continuous-time motion correction. InProc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2023
work page 2023
- [6]
-
[7]
C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza. On-manifold preintegration for real-time visual–inertial odometry.IEEE Trans. on Robotics (TRO), 33(1):1–21, 2017
work page 2017
- [8]
-
[9]
G. Grisetti, T. Guadagnino, I. Aloise, M. Colosi, B. Della Corte, and D. Schlegel. Least Squares Optimization: From Theory to Practice. Robotics, 9(3), 2020
work page 2020
-
[10]
T. Guadagnino, B. Mersch, S. Gupta, I. Vizzo, G. Grisetti, and C. Stachniss. KISS-SLAM: A Simple, Robust, and Accurate 3D LiDAR SLAM System With Enhanced Generalization Capabilities. In Proc. of the IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2025
work page 2025
-
[11]
T. Guadagnino, B. Mersch, I. Vizzo, S. Gupta, M. Malladi, L. Lobe- faro, G. Doisy, and C. Stachniss. Kinematic-ICP: Enhancing LiDAR Odometry with Kinematic Constraints for Wheeled Mobile Robots Moving on Planar Surfaces. InProc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2025
work page 2025
-
[12]
P. Gui, L. Tang, and S. Mukhopadhyay. Mems based imu for tilting measurement: Comparison of complementary and kalman filter based data fusion. InProc. of the IEEE Intl. Conf. on Industrial Electronics and Applications (ICIEA), 2015
work page 2015
-
[13]
C. Hertzberg, R. Wagner, U. Frese, and L. Schr ¨oder. Integrating generic sensor fusion algorithms with sound state representations through encapsulation of manifolds.Information Fusion, 14(1):57– 77, 2013
work page 2013
-
[14]
E. Jelavic, T. Kapgen, S. Kerscher, D. Jud, and M. Hutter. Harveri : A small (semi-)autonomous precision tree harvester. InProc. of the ICRA Workshop on Innovation in F orestry Robotics: Research and Industry Adoption, 2022
work page 2022
-
[15]
M. Jung, W. Yang, D. Lee, H. Gil, G. Kim, and A. Kim. Helipr: Heterogeneous lidar dataset for inter-lidar place recognition under spatiotemporal variations.Intl. Journal of Robotics Research (IJRR), 43(12):1867–1883, 2024
work page 2024
- [16]
- [17]
- [18]
-
[19]
K. Li, M. Li, and U.D. Hanebeck. Towards high-performance solid-state-lidar-inertial odometry and mapping.IEEE Robotics and Automation Letters (RA-L), 6(3):5167–5174, 2021
work page 2021
-
[20]
H.J. Luinge and P.H. Veltink. Measuring orientation of human body segments using miniature gyroscopes and accelerometers.Medical and Biological Engineering and Computing, 43(2):273–282, 2005
work page 2005
- [21]
-
[22]
M.V . Malladi, N. Chebrolu, I. Scacchetti, L. Lobefaro, T. Guadagnino, B. Casseau, H. Oh, L. Freißmuth, M. Karppinen, J. Schweier, S. Leutenegger, J. Behley, C. Stachniss, and M. Fallon. DigiForests: A Longitudinal LiDAR Dataset for Forestry Robotics. InProc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2025
work page 2025
- [23]
-
[24]
H. Oh, N. Chebrolu, M. Mattamala, L. Freissmuth, and M. Fallon. Evaluation and Deployment of LiDAR-based Place Recognition in Dense Forests. InProc. of the IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2024
work page 2024
-
[25]
G. Ou, D. Li, and H. Li. Leg-kilo: Robust kinematic-inertial-lidar odometry for dynamic legged robots.IEEE Robotics and Automation Letters (RA-L), 9(10):8194–8201, 2024
work page 2024
-
[26]
P. Pfreundschuh, H. Oleynikova, C. Cadena, R. Siegwart, and O. An- dersson. Coin-lio: Complementary intensity-augmented lidar inertial odometry. InProc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2024
work page 2024
-
[27]
S. Rusinkiewicz and M. Levoy. Efficient variants of the ICP algorithm. InProc. of Intl. Conf. on 3-D Digital Imaging and Modeling, 2001
work page 2001
-
[28]
T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus. LIO- SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. InProc. of the IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2020
work page 2020
-
[29]
J. Sol `a. Quaternion kinematics for the error-state kalman filter.arXiv preprint, arXiv:1711.02508, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[30]
A micro Lie theory for state estimation in robotics,
J. Sol `a, J. Deray, and D. Atchuthan. A micro lie theory for state estimation in robotics.arXiv preprint, arXiv:1812.01537, 2021
-
[31]
Y . Tao, M. ´A. Mu ˜noz-Ba˜n´on, L. Zhang, J. Wang, L.F.T. Fu, and M. Fallon. The oxford spires dataset: Benchmarking large-scale lidar-visual localisation, reconstruction and radiance field methods. Intl. Journal of Robotics Research (IJRR), 2025
work page 2025
- [32]
-
[33]
I. Vizzo, B. Mersch, L. Nunes, L. Wiesmann, T. Guadagnino, and C. Stachniss. Toward Reproducible Version-Controlled Perception Platforms: Embracing Simplicity in Autonomous Vehicle Dataset Ac- quisition. InProc. of the IEE Intl. Conf. on Intelligent Transportation Systems (ITSC) Workshop: Building Reliable Datasets for Autonomous V ehicles, 2023
work page 2023
-
[34]
L. Wiesmann, E. Marks, S. Gupta, T. Guadagnino, J. Behley, and C. Stachniss. Efficient LiDAR Bundle Adjustment for Multi-Scan Alignment Utilizing Continuous-Time Trajectories.arXiv preprint, arXiv:2412.11760, 2024
- [35]
-
[36]
Y . Wu, T. Guadagnino, L. Wiesmann, L. Klingbeil, C. Stachniss, and H. Kuhlmann. LIO-EKF: High frequency LiDAR-inertial odometry using extended Kalman filters. InProc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2024
work page 2024
- [37]
-
[38]
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang. Fast-lio2: Fast direct lidar-inertial odometry.IEEE Trans. on Robotics (TRO), 38:2053– 2073, 2021
work page 2053
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.