Relay-Based Coordination for Energy-Efficient Multi-Robot Pickup and Delivery
Pith reviewed 2026-05-18 15:50 UTC · model grok-4.3
The pith
Relay-based coordination through Voronoi-Steiner networks reduces multi-robot delivery travel by 31% on average
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
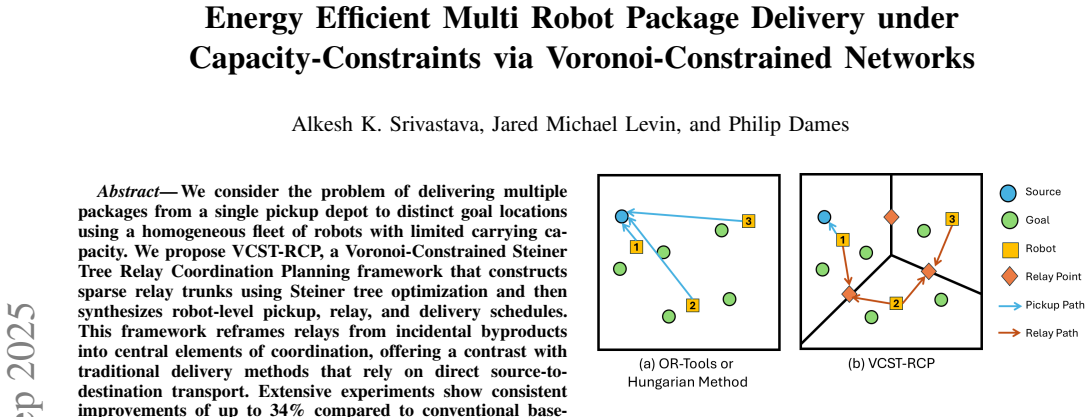
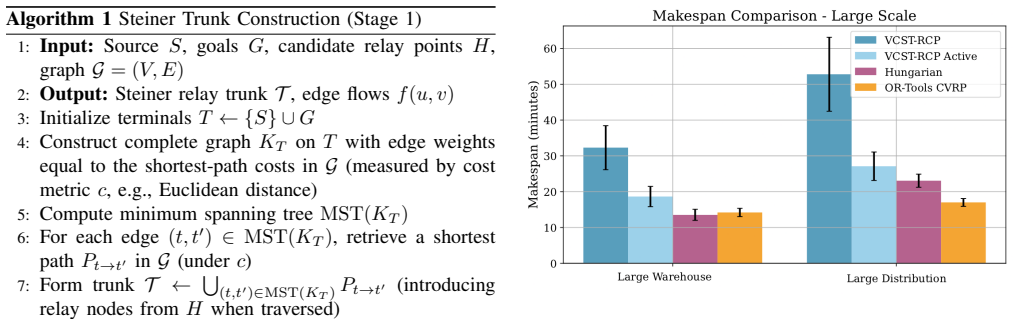
VCST-RCP operates in two stages: first constructing a sparse relay backbone by combining Voronoi-derived exchange interfaces with Steiner tree optimization, and second synthesizing robot-level pickup, relay, and delivery schedules under capacity and service-time constraints. This relay-based approach reduces redundant long-haul motion and achieves an average 31% reduction in total fleet travel distance compared to Hungarian assignment, with statistically significant improvements.
What carries the argument
The VCST-RCP framework that explicitly treats inter-robot relays as a design primitive and organizes package flow through a shared relay network constructed from Voronoi interfaces and Steiner trees.
If this is right
- Relay optimization provides substantially larger gains than adapting spatial partitioning alone.
- Total fleet travel distance drops by 31% on average and up to nearly 50% in tested instances.
- Delivery efficiency rises by over 50% when measured as packages delivered per kilometer.
- Statistically significant improvements hold across multiple problem scales with p less than 10 to the minus 3.
Where Pith is reading between the lines
- Extending the relay concept to dynamic environments could allow robots to adapt the backbone as new packages arrive.
- Adding modest handoff costs in the model might still retain most benefits if relay points are chosen to minimize extra motion.
- Physical robot tests could confirm if simulation gains persist when communication and synchronization delays are real.
Load-bearing premise
The assumption that inter-robot package handoffs at the computed relay points incur no extra time, energy, or failure costs beyond the modeled capacity and service-time constraints.
What would settle it
Running physical experiments with actual robots performing handoffs and measuring total energy consumption and delivery times to check if the 31% travel reduction holds under real-world conditions.
Figures





read the original abstract
We consider the problem of delivering multiple packages from a single depot to distinct goal locations using a homogeneous fleet of robots with limited carrying capacity. We propose VCST-RCP, a Voronoi-Constrained Steiner Tree Relay Coordination Planning framework that explicitly treats inter-robot relays as a design primitive. The approach operates in two stages: (i) constructing a sparse relay backbone by combining Voronoi-derived exchange interfaces with Steiner tree optimization, and (ii) synthesizing robot-level pickup, relay, and delivery schedules under capacity and service-time constraints. Unlike traditional methods that rely on direct source-to-destination transport, our framework organizes package flow through a shared relay network, reducing redundant long-haul motion. Extensive experiments across multiple scales show that VCST-RCP reduces total fleet travel distance by an average of 31% (up to nearly 50%) compared to Hungarian assignment and significantly outperforms OR-Tools CVRP, with statistically significant improvements (p < 10^{-3}). These gains translate into over 50% higher delivery efficiency (packages per kilometer), directly improving energy utilization. An ablation study further reveals that optimizing relay placement yields substantially larger improvements than adapting spatial partitioning alone, establishing relay design as the dominant factor governing system performance. Overall, the results demonstrate that relay-based coordination provides a scalable and effective framework for energy-aware multi-robot delivery in real-world logistics settings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes VCST-RCP, a two-stage Voronoi-Constrained Steiner Tree Relay Coordination Planning framework for multi-robot pickup and delivery from a depot to distinct goals with capacity-limited homogeneous robots. Stage (i) builds a sparse relay backbone via Voronoi-derived exchange interfaces combined with Steiner tree optimization; stage (ii) synthesizes per-robot pickup-relay-delivery schedules respecting capacity and service-time constraints. Experiments across scales report an average 31% (up to ~50%) reduction in total fleet travel distance versus Hungarian assignment, statistically significant outperformance of OR-Tools CVRP (p < 10^{-3}), and >50% higher delivery efficiency (packages per km), with an ablation attributing gains primarily to relay placement rather than spatial partitioning alone.
Significance. If the travel-distance reductions are shown to persist once synchronization and transfer costs are modeled, the work would offer a concrete, scalable primitive for energy-aware multi-robot logistics that moves beyond direct-assignment baselines. The explicit treatment of relays as a design variable and the ablation isolating its contribution are positive features; reproducible code or parameter-free derivations would further strengthen the contribution.
major comments (2)
- [Abstract / Experiments] Abstract and experimental section: the headline claim of 31% average travel-distance reduction (p < 10^{-3}) and the associated efficiency gains are presented without reported trial counts, variance or standard deviations, exact instance sizes (number of packages, robots, map scale), or explicit description of how capacity constraints were enforced during schedule synthesis. These omissions make the statistical significance and generalizability of the central performance result difficult to verify.
- [Method / Problem formulation] Two-stage construction (Voronoi-Steiner backbone followed by schedule synthesis): the model treats inter-robot handoffs at computed relay points as incurring zero extra time, energy, or motion cost beyond the stated capacity and service-time constraints. Because total fleet travel distance is the primary metric, any realistic synchronization (arrival-time windows, physical transfer, or forced waiting) can induce additional motion or longer paths that compound across multi-hop flows and may shrink or reverse the reported advantage over Hungarian assignment and OR-Tools CVRP.
minor comments (2)
- [Abstract] The abstract uses the phrase 'Voronoi-Constrained Steiner Tree' without a short inline definition or pointer to the specific Steiner-tree formulation employed; a one-sentence clarification would aid readers unfamiliar with the geometric construction.
- [Figures / Tables] Figure captions and table legends should explicitly state the number of random seeds or map realizations used for each reported average.
Simulated Author's Rebuttal
We are grateful to the referee for the constructive and detailed feedback on our manuscript. We address each major comment point by point below, indicating the revisions we plan to make.
read point-by-point responses
-
Referee: [Abstract / Experiments] Abstract and experimental section: the headline claim of 31% average travel-distance reduction (p < 10^{-3}) and the associated efficiency gains are presented without reported trial counts, variance or standard deviations, exact instance sizes (number of packages, robots, map scale), or explicit description of how capacity constraints were enforced during schedule synthesis. These omissions make the statistical significance and generalizability of the central performance result difficult to verify.
Authors: We acknowledge these omissions in the presentation of our experimental results. In the revised manuscript, we will expand the experimental section to include the number of independent trials conducted for each configuration, standard deviations and variances for the reported metrics (including the 31% average reduction), exact instance sizes (number of packages, robots, and map scales), and a clear description of how capacity constraints were enforced during schedule synthesis. These details will be added via an expanded table and accompanying text to improve verifiability and allow better assessment of generalizability. revision: yes
-
Referee: [Method / Problem formulation] Two-stage construction (Voronoi-Steiner backbone followed by schedule synthesis): the model treats inter-robot handoffs at computed relay points as incurring zero extra time, energy, or motion cost beyond the stated capacity and service-time constraints. Because total fleet travel distance is the primary metric, any realistic synchronization (arrival-time windows, physical transfer, or forced waiting) can induce additional motion or longer paths that compound across multi-hop flows and may shrink or reverse the reported advantage over Hungarian assignment and OR-Tools CVRP.
Authors: The referee is correct that our model assumes zero additional costs for inter-robot handoffs at the relay points, beyond the capacity and service-time constraints already stated. This is an explicit modeling choice to focus on the travel-distance savings enabled by the Voronoi-constrained Steiner tree backbone as the primary objective. We agree that realistic synchronization, waiting, or transfer costs could introduce overhead that affects the net gains. In the revision, we will add a limitations paragraph discussing this assumption, its rationale, and how it positions the reported results as an idealized baseline. We will also outline extensions for incorporating time windows and transfer costs in future work. revision: partial
- Empirically demonstrating whether the travel-distance reductions persist once synchronization and transfer costs are explicitly modeled would require new experiments and extensions beyond the scope of the current manuscript.
Circularity Check
No significant circularity: empirical evaluation against external baselines
full rationale
The paper presents VCST-RCP as a two-stage algorithmic procedure (Voronoi-Steiner relay backbone followed by capacity-constrained schedule synthesis) whose performance is measured via simulation against independent external solvers (Hungarian assignment, OR-Tools CVRP). The reported 31% travel-distance reduction and ablation results are direct outputs of these comparisons on generated problem instances, not re-expressions of fitted parameters or self-citations that define the metric by construction. No equations or load-bearing self-references collapse the claimed savings into the input data or prior author work; the derivation chain remains self-contained as a constructive planner evaluated externally.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Voronoi diagrams produce suitable exchange interfaces for multi-robot handoffs.
- standard math Steiner tree optimization yields a sparse, low-cost relay backbone under the problem constraints.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose VCST-RCP, a Voronoi-Constrained Steiner Tree Relay Coordination Planning framework
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
- [1]
-
[2]
A review on energy efficiency in autonomous mobile robots,
M. Wu, C. F. Yeong, E. L. M. Su, W. Holderbaum, and C. Yang, “A review on energy efficiency in autonomous mobile robots,”Robotic Intelligence and Automation, vol. 43, no. 6, pp. 648–668, 2023
work page 2023
-
[3]
The hungarian method for the assignment problem,
H. W. Kuhn, “The hungarian method for the assignment problem,” Naval research logistics quarterly, vol. 2, no. 1-2, pp. 83–97, 1955
work page 1955
-
[4]
On the capacitated vehicle routing problem,
T. K. Ralphs, L. Kopman, W. R. Pulleyblank, and L. E. Trotter, “On the capacitated vehicle routing problem,”Mathematical programming, vol. 94, no. 2, pp. 343–359, 2003
work page 2003
-
[5]
Amazon has more than 750,000 robots that sort, lift, and carry packages-see them in action,
T. Greenawalt, “Amazon has more than 750,000 robots that sort, lift, and carry packages-see them in action,” Oct 2024
work page 2024
-
[6]
F. K. Hwang and D. S. Richards, “Steiner tree problems,”Networks, vol. 22, no. 1, pp. 55–89, 1992
work page 1992
-
[7]
Capacitated vehicle routing problem (cvrp) – google or-tools
Google Developers, “Capacitated vehicle routing problem (cvrp) – google or-tools.”https://developers.google.com/opti mization/routing/cvrp, 2025. Accessed: 2025-09-13
work page 2025
-
[8]
The traveling salesman problem,
M. J ¨unger, G. Reinelt, and G. Rinaldi, “The traveling salesman problem,”Handbooks in operations research and management science, vol. 7, pp. 225–330, 1995
work page 1995
-
[9]
The multiple traveling salesman problem: an overview of formulations and solution procedures,
T. Bektas, “The multiple traveling salesman problem: an overview of formulations and solution procedures,”omega, vol. 34, no. 3, pp. 209– 219, 2006
work page 2006
- [10]
-
[11]
The vehicle routing problem: A taxonomic review,
B. Eksioglu, A. V . Vural, and A. Reisman, “The vehicle routing problem: A taxonomic review,”Computers & Industrial Engineering, vol. 57, no. 4, pp. 1472–1483, 2009
work page 2009
-
[12]
Conflict-based search for optimal multi-agent pathfinding,
G. Sharon, R. Stern, A. Felner, and N. R. Sturtevant, “Conflict-based search for optimal multi-agent pathfinding,”Artificial intelligence, vol. 219, pp. 40–66, 2015
work page 2015
-
[13]
The increasing cost tree search for optimal multi-agent pathfinding,
G. Sharon, R. Stern, M. Goldenberg, and A. Felner, “The increasing cost tree search for optimal multi-agent pathfinding,”Artificial intel- ligence, vol. 195, pp. 470–495, 2013
work page 2013
-
[14]
Efficient sat approach to multi-agent path finding under the sum of costs objective,
P. Surynek, A. Felner, R. Stern, and E. Boyarski, “Efficient sat approach to multi-agent path finding under the sum of costs objective,” inProceedings of the twenty-second european conference on artificial intelligence, pp. 810–818, 2016
work page 2016
-
[15]
Multi-agent path planning and network flow,
J. Yu and S. M. LaValle, “Multi-agent path planning and network flow,” inAlgorithmic Foundations of Robotics X: Proceedings of the Tenth Workshop on the Algorithmic Foundations of Robotics, pp. 157– 173, Springer, 2013
work page 2013
-
[16]
A review of graph-based multi-agent pathfinding solvers: From classical to beyond classical,
J. Gao, Y . Li, X. Li, K. Yan, K. Lin, and X. Wu, “A review of graph-based multi-agent pathfinding solvers: From classical to beyond classical,”Knowledge-Based Systems, vol. 283, p. 111121, 2024
work page 2024
-
[17]
O. Salzman and R. Stern, “Research challenges and opportunities in multi-agent path finding and multi-agent pickup and delivery problems,” inProceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems, pp. 1711–1715, 2020
work page 2020
-
[18]
Suboptimal variants of the conflict-based search algorithm for the multi-agent pathfinding problem,
M. Barer, G. Sharon, R. Stern, and A. Felner, “Suboptimal variants of the conflict-based search algorithm for the multi-agent pathfinding problem,” inProceedings of the International Symposium on Combi- natorial Search, vol. 5, pp. 19–27, 2014
work page 2014
-
[19]
S. D. Han and J. Yu, “Ddm: Fast near-optimal multi-robot path planning using diversified-path and optimal sub-problem solution database heuristics,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 1350–1357, 2020
work page 2020
-
[20]
Task and path planning for multi- agent pickup and delivery,
M. Liu, H. Ma, J. Li, and S. Koenig, “Task and path planning for multi- agent pickup and delivery,” inProceedings of the International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2019
work page 2019
-
[21]
Lifelong Multi-Agent Path Finding for Online Pickup and Delivery Tasks
H. Ma, J. Li, T. Kumar, and S. Koenig, “Lifelong multi-agent path finding for online pickup and delivery tasks,”arXiv preprint arXiv:1705.10868, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[22]
B. D. Song, J. Kim, and J. R. Morrison, “Rolling horizon path planning of an autonomous system of uavs for persistent cooperative service: Milp formulation and efficient heuristics,”Journal of Intelligent & Robotic Systems, vol. 84, no. 1, pp. 241–258, 2016
work page 2016
-
[23]
X. Wang and H. Kopfer, “Rolling horizon planning for a dynamic collaborative routing problem with full-truckload pickup and delivery requests,”Flexible Services and Manufacturing Journal, vol. 27, no. 4, pp. 509–533, 2015
work page 2015
-
[24]
S. Kemna, J. G. Rogers, C. Nieto-Granda, S. Young, and G. S. Sukhatme, “Multi-robot coordination through dynamic voronoi par- titioning for informative adaptive sampling in communication- constrained environments,” in2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 2124–2130, IEEE, 2017
work page 2017
-
[25]
A. K. Srivastava, G. P. Kontoudis, D. Sofge, and M. Otte, “Distributed multi-robot information gathering using path-based sensors in entropy- weighted voronoi regions,” inInternational Symposium on Distributed Autonomous Robotic Systems, pp. 286–299, Springer, 2022
work page 2022
-
[26]
Anchor-oriented localized voronoi partitioning for gps-denied multi-robot coverage,
A. Munir, E. Latif, and R. Parasuraman, “Anchor-oriented localized voronoi partitioning for gps-denied multi-robot coverage,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3395–3402, IEEE, 2024
work page 2024
-
[27]
J. Hu, H. Niu, J. Carrasco, B. Lennox, and F. Arvin, “V oronoi- based multi-robot autonomous exploration in unknown environments via deep reinforcement learning,”IEEE Transactions on Vehicular Technology, vol. 69, no. 12, pp. 14413–14423, 2020
work page 2020
-
[28]
V oronoi-based coverage control with connec- tivity maintenance for robotic sensor networks,
W. Luo and K. Sycara, “V oronoi-based coverage control with connec- tivity maintenance for robotic sensor networks,” in2019 International Symposium on Multi-Robot and Multi-Agent Systems (MRS), pp. 148– 154, IEEE, 2019
work page 2019
-
[29]
A voronoi diagram-based workspace partition for weak cooperation of multi-robot system in orchard,
J. Kim and H. I. Son, “A voronoi diagram-based workspace partition for weak cooperation of multi-robot system in orchard,”IEEE Access, vol. 8, pp. 20676–20686, 2020
work page 2020
-
[30]
S.-K. Huang, W.-J. Wang, and C.-H. Sun, “A path planning strategy for multi-robot moving with path-priority order based on a generalized voronoi diagram,”Applied Sciences, vol. 11, no. 20, p. 9650, 2021
work page 2021
-
[31]
K. Lee and K. Lee, “Adaptive centroidal voronoi tessellation with agent dropout and reinsertion for multi-agent non-convex area cover- age,”IEEE Access, vol. 12, pp. 5503–5516, 2024
work page 2024
-
[32]
Gm-vpc: An algorithm for multi- robot coverage of known spaces using generalized voronoi partition,
V . G. Nair and K. Guruprasad, “Gm-vpc: An algorithm for multi- robot coverage of known spaces using generalized voronoi partition,” Robotica, vol. 38, no. 5, pp. 845–860, 2020
work page 2020
-
[33]
Distributed voronoi partitioning for multi-robot systems with limited range sensors,
K. Guruprasad and P. Dasgupta, “Distributed voronoi partitioning for multi-robot systems with limited range sensors,” in2012 IEEE/RSJ international conference on intelligent robots and systems, pp. 3546– 3552, IEEE, 2012
work page 2012
-
[34]
Distributed multi-target search and tracking using the phd filter,
P. M. Dames, “Distributed multi-target search and tracking using the phd filter,”Autonomous robots, vol. 44, no. 3, pp. 673–689, 2020
work page 2020
-
[35]
The zermelo–voronoi diagram: A dynamic partition problem,
E. Bakolas and P. Tsiotras, “The zermelo–voronoi diagram: A dynamic partition problem,”Automatica, vol. 46, no. 12, pp. 2059–2067, 2010
work page 2059
-
[36]
A. K. Srivastava, J. M. Levin, A. Derrico, and P. Dames, “DELIVER: A system for llm-guided coordinated multi-robot pickup and delivery using voronoi-based relay planning,”arXiv preprint arXiv:2508.19114, 2025
-
[37]
Anytime multi-task multi-agent pickup and delivery under energy constraint,
F. Kudo and K. Cai, “Anytime multi-task multi-agent pickup and delivery under energy constraint,”IEEE Robotics and Automation Letters, vol. 9, pp. 10145–10152, Nov 2024
work page 2024
-
[38]
Review of autonomous mobile robots for the warehouse environment,
R. Keith and H. M. La, “Review of autonomous mobile robots for the warehouse environment,”arXiv preprint arXiv:2406.08333, 2024
-
[39]
K. Bujel, F. Lai, M. Szczecinski, W. So, and M. Fernandez, “Solving high volume capacitated vehicle routing problem with time win- dows using recursive-dbscan clustering algorithm,”arXiv preprint arXiv:1812.02300, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.