Frictional Q-Learning
Pith reviewed 2026-05-18 14:42 UTC · model grok-4.3
The pith
Frictional Q-Learning mitigates extrapolation errors in off-policy reinforcement learning by decomposing the replay buffer into tangential supported directions and normal error components using a friction analogy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Off-policy reinforcement learning suffers from extrapolation errors when a learned policy selects actions that are weakly supported in the replay buffer. From this perspective, the replay buffer is represented as a smooth, low-dimensional action manifold, where the support directions correspond to the tangential component, while the normal component captures the dominant first-order extrapolation error. This decomposition reveals an intrinsic anisotropy in value sensitivity that naturally induces a stability condition analogous to a friction threshold. Frictional Q-Learning encodes supported actions as tangent directions using a contrastive variational autoencoder and shows that an orthonorm
What carries the argument
The contrastive variational autoencoder encoding supported actions as tangent directions on the action manifold, combined with the friction threshold stability condition derived from the tangential-normal decomposition.
If this is right
- Robust and stable performance on standard continuous-control benchmarks compared with competitive baselines.
- The method enforces avoidance of actions with large normal components, reducing value estimation errors.
- Under local isometry assumptions, the orthogonal complement provides the normal directions for error correction.
- Value sensitivity exhibits anisotropy due to the manifold structure, leading to directional stability preferences.
Where Pith is reading between the lines
- This friction-based decomposition might extend to other off-policy methods like actor-critic algorithms beyond Q-learning.
- Applying the manifold representation to high-dimensional state spaces could test the scalability of the low-dimensional action manifold assumption.
- Investigating whether the contrastive VAE can be replaced with simpler density estimators would clarify the necessity of the variational approach.
Load-bearing premise
The replay buffer forms a smooth low-dimensional manifold where deviations to unsupported actions are dominated by first-order extrapolation errors in the normal direction.
What would settle it
Running Frictional Q-Learning on a benchmark where the replay buffer does not approximate a low-dimensional manifold and observing persistent instability or no performance gain would falsify the core manifold assumption.
Figures




read the original abstract
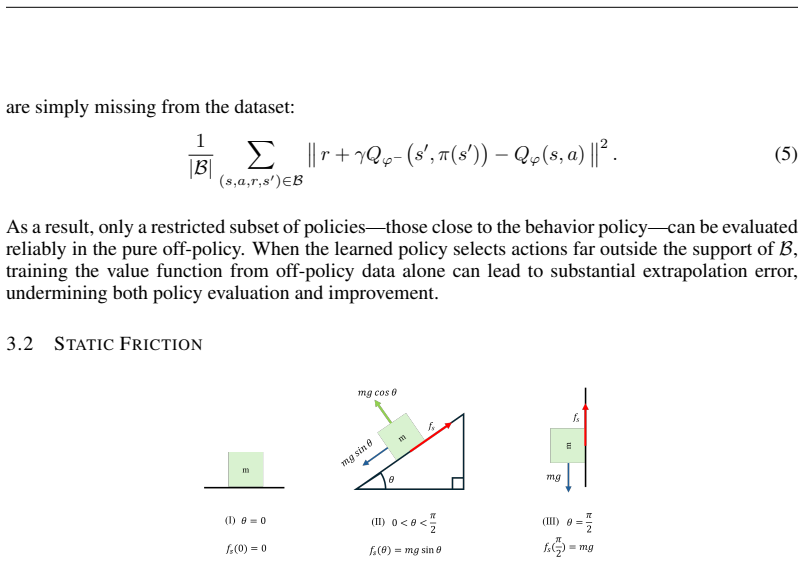
Off-policy reinforcement learning suffers from extrapolation errors when a learned policy selects actions that are weakly supported in the replay buffer. In this study, we address this issue by drawing an analogy to static friction. From this perspective, the replay buffer is represented as a smooth, low-dimensional action manifold, where the support directions correspond to the tangential component, while the normal component captures the dominant first-order extrapolation error. This decomposition reveals an intrinsic anisotropy in value sensitivity that naturally induces a stability condition analogous to a friction threshold. To mitigate deviations toward unsupported actions, we propose Frictional Q-Learning, an off-policy algorithm that encodes supported actions as tangent directions using a contrastive variational autoencoder. We further show that an orthonormal basis of the orthogonal complement corresponds to normal components under mild local isometry assumptions. Extensive empirical results on standard continuous-control benchmarks consistently demonstrate robust and stable performance compared with competitive baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes Frictional Q-Learning, an off-policy RL algorithm that models the replay buffer as a smooth low-dimensional action manifold. Supported actions are encoded as tangent directions via a contrastive variational autoencoder, while the normal component of an orthonormal basis of the orthogonal complement is claimed to capture first-order extrapolation error under mild local isometry assumptions. This decomposition is said to induce an intrinsic anisotropy in value sensitivity that yields a stability condition analogous to a static friction threshold. The paper reports robust and stable empirical performance on standard continuous-control benchmarks relative to competitive baselines.
Significance. If the manifold decomposition, local-isometry correspondence, and friction-threshold stability condition can be rigorously established, the work would supply a geometrically motivated mechanism for controlling extrapolation error in off-policy continuous-control RL. The contrastive-VAE encoding of tangent directions and the explicit friction analogy constitute a distinctive framing that could influence subsequent research on action-space geometry and value-function stability.
major comments (2)
- [Abstract and §3] Abstract and §3 (theoretical development): the central claims that the replay buffer constitutes a smooth low-dimensional action manifold, that support directions are exactly the tangential component, and that an orthonormal basis of the orthogonal complement corresponds to normal components under mild local isometry are asserted without derivation, error bounds, or explicit construction of the manifold from the replay buffer.
- [§4 and §5] §4 (algorithm) and §5 (experiments): the friction threshold is introduced as a free parameter whose value is not derived from the fitted manifold or from any previously computed quantity; no ablation or sensitivity analysis quantifies how performance depends on this choice, undermining the claim that the method is parameter-light relative to baselines.
minor comments (2)
- [§3] Notation for the contrastive VAE loss and the precise definition of the tangent/normal decomposition should be stated explicitly with consistent symbols across sections.
- [§5] Figure captions and axis labels in the experimental section would benefit from explicit indication of which baseline each curve corresponds to and whether shaded regions represent standard error or min/max.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback on our manuscript. We address each major comment in detail below and outline the revisions we plan to make.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (theoretical development): the central claims that the replay buffer constitutes a smooth low-dimensional action manifold, that support directions are exactly the tangential component, and that an orthonormal basis of the orthogonal complement corresponds to normal components under mild local isometry are asserted without derivation, error bounds, or explicit construction of the manifold from the replay buffer.
Authors: The theoretical claims in the abstract and §3 are derived under the stated mild local isometry assumptions, which allow us to identify the tangential and normal components with respect to the action manifold fitted via the contrastive VAE. However, we agree that providing an explicit step-by-step construction of the manifold from the replay buffer data and including error bounds would improve clarity. In the revised manuscript, we will expand §3 with a detailed derivation, including how the replay buffer points are used to learn the manifold and bounds on the first-order extrapolation error. revision: yes
-
Referee: [§4 and §5] §4 (algorithm) and §5 (experiments): the friction threshold is introduced as a free parameter whose value is not derived from the fitted manifold or from any previously computed quantity; no ablation or sensitivity analysis quantifies how performance depends on this choice, undermining the claim that the method is parameter-light relative to baselines.
Authors: The friction threshold is a hyperparameter motivated by the stability condition in §3, but we acknowledge that it is not automatically derived from the manifold. To strengthen the empirical validation and address the concern about parameter sensitivity, we will include an ablation study in the revised version of §5. This study will vary the threshold value and report performance metrics on the benchmarks, showing that the method maintains competitive performance across a range of values and remains relatively parameter-light compared to baselines that require more extensive tuning. revision: yes
Circularity Check
No significant circularity; derivation introduces novel components
full rationale
The paper's derivation chain begins with an explicit analogy to static friction and defines the replay buffer as a smooth low-dimensional action manifold with tangential support directions and normal extrapolation-error components. It then introduces a contrastive variational autoencoder to encode tangent directions and states that an orthonormal basis of the orthogonal complement corresponds to normal components under mild local isometry assumptions. These steps are presented as new modeling choices rather than reductions of outputs to previously fitted parameters or self-citations. No equation is shown to equal its input by construction, no parameter is fitted on a subset and then relabeled as a prediction, and no load-bearing uniqueness theorem is imported from prior author work. The empirical evaluation on standard continuous-control benchmarks therefore rests on independently stated assumptions and architectural innovations, rendering the central claims self-contained.
Axiom & Free-Parameter Ledger
free parameters (1)
- friction threshold
axioms (1)
- domain assumption mild local isometry assumptions
invented entities (1)
-
action manifold
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
replay buffer is represented as a smooth, low-dimensional action manifold, where the support directions correspond to the tangential component, while the normal component captures the dominant first-order extrapolation error
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
an orthonormal basis of the orthogonal complement corresponds to normal components under mild local isometry assumptions
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Contrastive Variational Autoencoder Enhances Salient Features
Abubakar Abid and James Zou. Contrastive variational autoencoder enhances salient features. arXiv preprint arXiv:1902.04601, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1902
-
[2]
The mechanics of n-player differentiable games
David Balduzzi, Sebastien Racaniere, James Martens, Jakob Foerster, Karl Tuyls, and Thore Graepel. The mechanics of n-player differentiable games. In Proceedings of the 35th International Conference on Machine Learning. PMLR, 2018
work page 2018
-
[3]
Dimitri P Bertsekas. Neuro-dynamic programming. In Encyclopedia of optimization, pp.\ 2555--2560. Springer, 2008
work page 2008
-
[4]
Maximum entropy reinforcement learning via energy-based normalizing flow, 2024
Chen-Hao Chao, Chien Feng, Wei-Fang Sun, Cheng-Kuang Lee, Simon See, and Chun-Yi Lee. Maximum entropy reinforcement learning via energy-based normalizing flow, 2024. URL https://arxiv.org/abs/2405.13629
-
[5]
Charles Augustin Coulomb. Th \'e orie des machines simples en ayant \'e gard au frottement de leurs parties et \`a la roideur des cordages . Bachelier, 1821
-
[6]
Improved deep reinforcement learning for robotics through distribution-based experience retention
Tim de Bruin, Jens Kober, Karl Tuyls, and Robert Babu s ka. Improved deep reinforcement learning for robotics through distribution-based experience retention. In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp.\ 3947--3952. IEEE, 2016
work page 2016
-
[7]
Addressing function approximation error in actor-critic methods
Scott Fujimoto, Herke Hoof, and David Meger. Addressing function approximation error in actor-critic methods. In International conference on machine learning, pp.\ 1587--1596. PMLR, 2018
work page 2018
-
[8]
Off-policy deep reinforcement learning without exploration
Scott Fujimoto, David Meger, and Doina Precup. Off-policy deep reinforcement learning without exploration. In International conference on machine learning, pp.\ 2052--2062. PMLR, 2019
work page 2052
-
[9]
Reinforcement learning with deep energy-based policies
Tuomas Haarnoja, Haoran Tang, Pieter Abbeel, and Sergey Levine. Reinforcement learning with deep energy-based policies. In Proceedings of the 34th International Conference on Machine Learning. PMLR, 2017
work page 2017
-
[10]
Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor
Tuomas Haarnoja, Aurick Zhou, Pieter Abbeel, and Sergey Levine. Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor. In International conference on machine learning, pp.\ 1861--1870. Pmlr, 2018
work page 2018
-
[11]
Selective experience replay for lifelong learning
David Isele and Akansel Cosgun. Selective experience replay for lifelong learning. In Proceedings of the AAAI conference on artificial intelligence, volume 32, 2018
work page 2018
-
[12]
Planning with Diffusion for Flexible Behavior Synthesis
Michael Janner, Yilun Du, Joshua B Tenenbaum, and Sergey Levine. Planning with diffusion for flexible behavior synthesis. arXiv preprint arXiv:2205.09991, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[13]
Policy gradient and actor--critic in continuous time
Yanwei Jia and Xun Yu Zhou. Policy gradient and actor--critic in continuous time. Journal of Machine Learning Research, 23 0 (84): 0 1--50, 2022
work page 2022
-
[14]
Yanwei Jia and Xun Yu Zhou. q-learning in continuous time. Journal of Machine Learning Research, 24 0 (130): 0 1--53, 2023
work page 2023
-
[15]
Hamilton--jacobi deep q-learning for continuous-time control
Jeongho Kim, Jaeuk Shin, and Insoon Yang. Hamilton--jacobi deep q-learning for continuous-time control. Journal of Machine Learning Research, 22 0 (262): 0 1--51, 2021
work page 2021
-
[16]
Auto-Encoding Variational Bayes
Diederik P Kingma and Max Welling. Auto-encoding variational bayes. arXiv preprint arXiv:1312.6114, 2013
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[17]
Vijay Konda and John Tsitsiklis. Actor-critic algorithms. Advances in neural information processing systems, 12, 1999
work page 1999
-
[18]
Continuous control with deep reinforcement learning
Timothy P Lillicrap, Jonathan J Hunt, Alexander Pritzel, Nicolas Heess, Tom Erez, Yuval Tassa, David Silver, and Daan Wierstra. Continuous control with deep reinforcement learning. arXiv preprint arXiv:1509.02971, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[19]
Stein variational policy gradient
Yang Liu, Prasanna Ramachandran, Qiang Liu, Jian Peng, et al. Stein variational policy gradient. In Proceedings of the 33rd Conference on Uncertainty in Artificial Intelligence. AUAI Press, 2017
work page 2017
-
[20]
Stochastic hamiltonian gradient methods for smooth games
Nicolas Loizou, Sharan Vaswani, Volkan Cevher, and Simon Lacoste-Julien. Stochastic hamiltonian gradient methods for smooth games. In Proceedings of the 37th International Conference on Machine Learning. PMLR, 2020
work page 2020
-
[21]
Philosophiae naturalis principia mathematica, volume 1
Isaac Newton. Philosophiae naturalis principia mathematica, volume 1. G. Brookman, 1833
-
[22]
Off-policy temporal-difference learning with function approximation
Doina Precup, Richard S Sutton, and Sanjoy Dasgupta. Off-policy temporal-difference learning with function approximation. In ICML, pp.\ 417--424, 2001
work page 2001
-
[23]
Stable-baselines3: Reliable reinforcement learning implementations
Antonin Raffin, Ashley Hill, Adam Gleave, Anssi Kanervisto, Maximilian Ernestus, and Noah Dormann. Stable-baselines3: Reliable reinforcement learning implementations. Journal of machine learning research, 22 0 (268): 0 1--8, 2021
work page 2021
-
[24]
Deterministic policy gradient algorithms
David Silver, Guy Lever, Nicolas Heess, Thomas Degris, Daan Wierstra, and Martin Riedmiller. Deterministic policy gradient algorithms. In International conference on machine learning, pp.\ 387--395. Pmlr, 2014
work page 2014
-
[25]
Emanuel Todorov, Tom Erez, and Yuval Tassa. Mujoco: A physics engine for model-based control. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.\ 5026--5033, 2012. doi:10.1109/IROS.2012.6386109
-
[26]
Mark Towers, Ariel Kwiatkowski, Jordan Terry, John U. Balis, Gianluca De Cola, Tristan Deleu, Manuel Goulão, Andreas Kallinteris, Markus Krimmel, Arjun KG, Rodrigo Perez-Vicente, Andrea Pierré, Sander Schulhoff, Jun Jet Tai, Hannah Tan, and Omar G. Younis. Gymnasium: A standard interface for reinforcement learning environments, 2024. URL https://arxiv.org...
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[27]
Reinforcement learning in continuous time and space: A stochastic control approach
Hao Wang and Xun Yu Zhou. Reinforcement learning in continuous time and space: A stochastic control approach. Journal of Machine Learning Research, 21 0 (178): 0 1--34, 2020
work page 2020
-
[28]
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION format.date year duplicate empty "emp...
-
[29]
\@ifxundefined[1] #1\@undefined \@firstoftwo \@secondoftwo \@ifnum[1] #1 \@firstoftwo \@secondoftwo \@ifx[1] #1 \@firstoftwo \@secondoftwo [2] @ #1 \@temptokena #2 #1 @ \@temptokena \@ifclassloaded agu2001 natbib The agu2001 class already includes natbib coding, so you should not add it explicitly Type <Return> for now, but then later remove the command n...
-
[30]
\@lbibitem[] @bibitem@first@sw\@secondoftwo \@lbibitem[#1]#2 \@extra@b@citeb \@ifundefined br@#2\@extra@b@citeb \@namedef br@#2 \@nameuse br@#2\@extra@b@citeb \@ifundefined b@#2\@extra@b@citeb @num @parse #2 @tmp #1 NAT@b@open@#2 NAT@b@shut@#2 \@ifnum @merge>\@ne @bibitem@first@sw \@firstoftwo \@ifundefined NAT@b*@#2 \@firstoftwo @num @NAT@ctr \@secondoft...
-
[31]
@open @close @open @close and [1] URL: #1 \@ifundefined chapter * \@mkboth \@ifxundefined @sectionbib * \@mkboth * \@mkboth\@gobbletwo \@ifclassloaded amsart * \@ifclassloaded amsbook * \@ifxundefined @heading @heading NAT@ctr thebibliography [1] @ \@biblabel @NAT@ctr \@bibsetup #1 @NAT@ctr @ @openbib .11em \@plus.33em \@minus.07em 4000 4000 `\.\@m @bibit...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.