Q-Net: Queue Length Estimation via Kalman-based Neural Networks
Pith reviewed 2026-05-21 22:05 UTC · model grok-4.3
The pith
Q-Net fuses loop-detector counts and floating-car speeds inside a state-space Kalman model to estimate queue lengths at signalized intersections.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Q-Net follows the standard Kalman predict-update cycle inside a state-space model that explicitly accounts for violations of traffic conservation. An AI component augments the filter by learning the time-varying Kalman gains directly from the two heterogeneous data sources. This structure preserves physical meaning in both the state transition and the measurement equations, supports real-time execution, and produces queue estimates that track formation and dissipation more accurately than baseline methods while reducing the impact of floating-car data delays.
What carries the argument
The AI-augmented Kalman filter that learns time-varying gains from loop-detector counts and aggregated floating-car speeds while retaining explicit state-evolution and measurement equations.
If this is right
- Queue formation and dissipation can be tracked in real time at signalized intersections without additional sensing hardware.
- Delays caused by the lower temporal resolution of floating-car data are reduced.
- The same trained model can be transferred to intersections of different lengths because the number of parameters does not grow with section size.
- Physical interpretability of state and measurement models is retained while still benefiting from data-driven gain adaptation.
Where Pith is reading between the lines
- The same structure could be tested on other traffic estimation tasks that combine fixed and mobile sensors, such as travel-time prediction on arterials.
- If the learned gains generalize across cities, agencies could deploy the method with minimal local calibration.
- Extending the state vector to include turning movements would be a direct next step to handle more complex intersections.
Load-bearing premise
The state-space equations plus the learned gains are flexible enough to capture real queue dynamics even when traffic conservation does not hold exactly.
What would settle it
Compare Q-Net queue estimates against independent high-resolution ground truth, such as video-based vehicle trajectories, during periods of rapid queue growth and clearance; large systematic errors would refute the claim.
Figures








read the original abstract
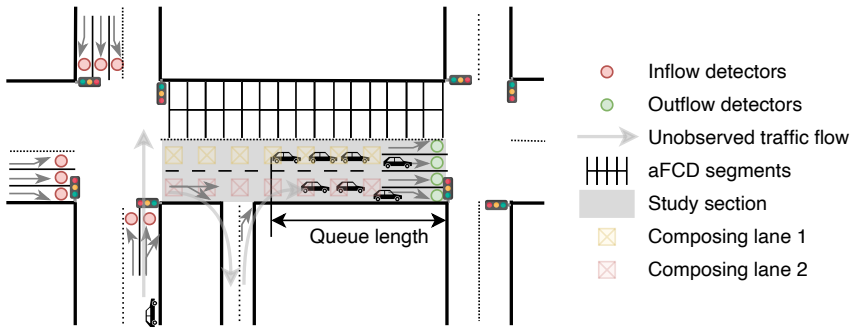
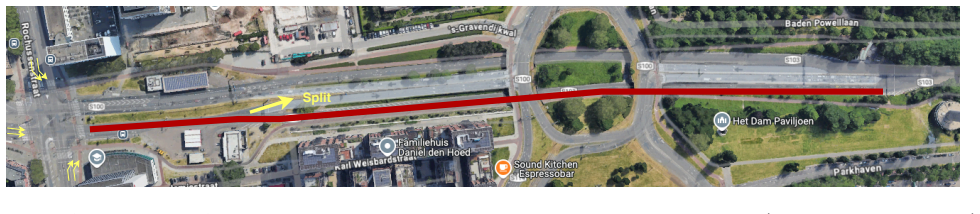
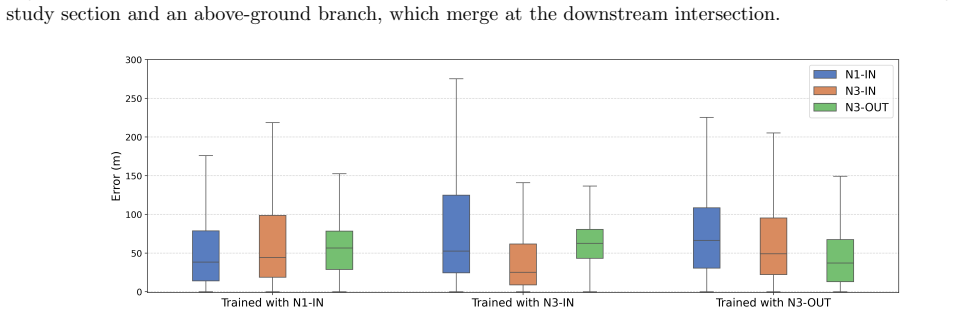
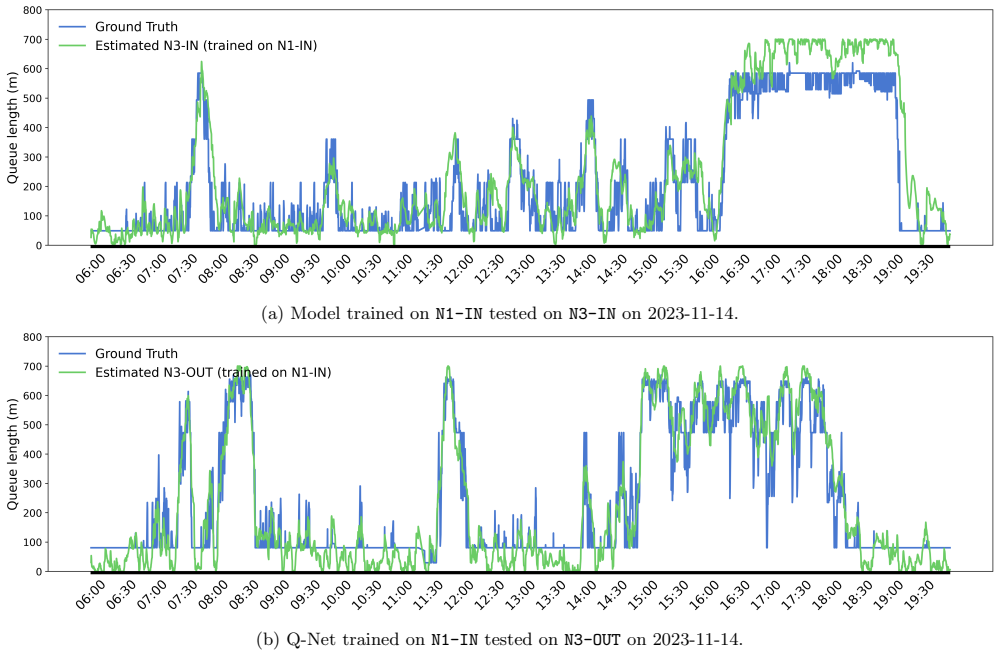
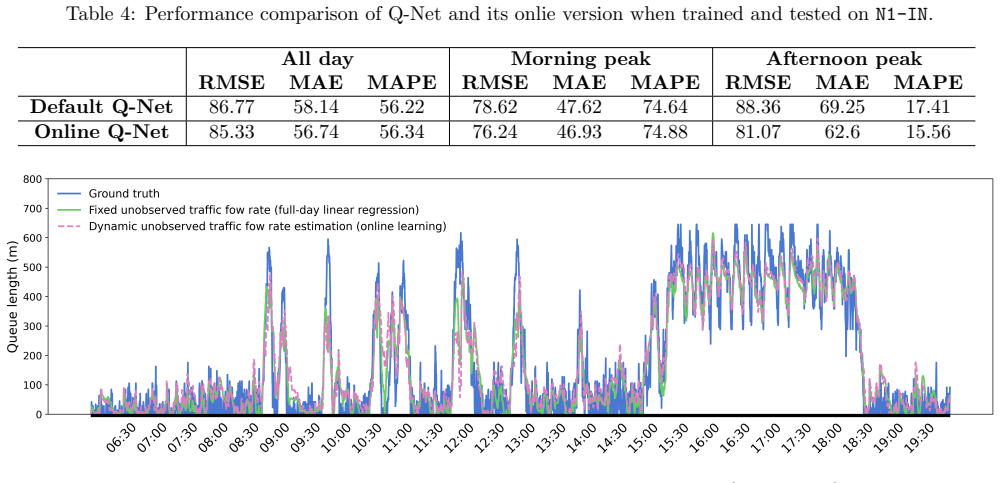
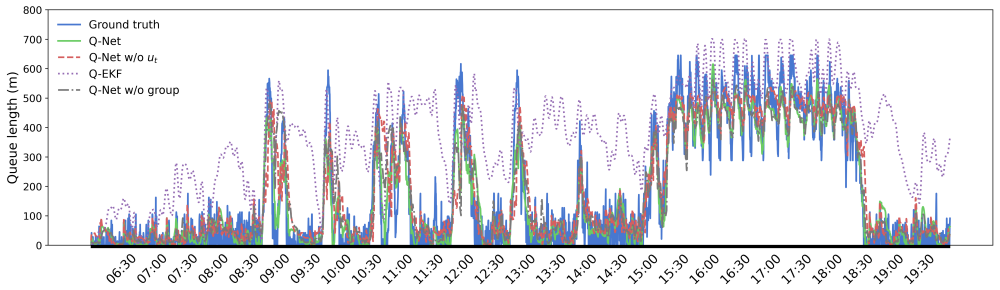
Estimating queue lengths at signalized intersections is a long-standing challenge in traffic management. Partial observability of vehicle flows complicates this task despite the availability of two privacy-preserving data sources: (i) aggregated vehicle counts from loop detectors near stop lines, and (ii) aggregated floating car data (aFCD) that provide segment-wise average speed measurements. However, how to integrate these sources with differing spatial and temporal resolutions for queue length estimation is rather unclear. Addressing this question, we present Q-Net: a queue estimation framework built upon a state-space formulation. This design addresses key challenges in queue modeling, such as violations of traffic conservation assumptions. Q-Net follows the Kalman predict-update structure and maintains physical interpretability in both the state evolution and measurement models. Q-Net uses an AI-augmented Kalman filter to learn time-varying gain dynamics from data. The framework supports real-time implementation and improves spatial transferability by grouping aFCD measurements into fixed-size local groups, making the number of learnable parameters independent of section length. Evaluations on urban main roads in Rotterdam, the Netherlands, show that Q-Net outperforms baseline methods, tracks queue formation and dissipation accurately, and mitigates aFCD-induced delays. By combining data efficiency, interpretability, real-time applicability, and spatial transferability, Q-Net makes accurate queue length estimation possible without costly sensing infrastructure like cameras or radar.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Q-Net, a queue length estimation framework for signalized intersections that fuses loop-detector counts with aggregated floating-car data (aFCD) speeds inside a state-space model. It augments the standard Kalman predict-update cycle with a neural network that learns only the time-varying gains, while keeping the state-evolution and measurement equations physically interpretable. The design is claimed to mitigate violations of traffic conservation, support real-time operation, and achieve spatial transferability by grouping aFCD measurements into fixed-size local blocks whose parameter count is independent of section length. Experiments on urban roads in Rotterdam are reported to show that Q-Net outperforms baseline methods and tracks queue formation and dissipation accurately.
Significance. If the empirical claims are substantiated with detailed metrics, the work would offer a practical advance in traffic-state estimation: an interpretable, data-efficient alternative to camera- or radar-based systems that can be deployed with existing privacy-preserving sensors. The restriction of the neural component to gain learning, together with the fixed-size grouping mechanism, addresses two common obstacles to real-world adoption—loss of physical meaning and poor spatial generalization—while preserving the real-time Kalman structure.
major comments (3)
- [Abstract and §5] Abstract and §5 (Evaluation): the abstract states that evaluations on Rotterdam roads show outperformance and accurate tracking, yet the manuscript provides no quantitative metrics (RMSE, MAE, error bars), baseline details, ablation results, or statistical significance tests. Without these, the central empirical claim cannot be assessed.
- [§3] §3 (Model Formulation): the assertion that the AI-augmented structure addresses violations of traffic conservation assumptions rests on the design choice alone; no explicit verification (e.g., residual analysis of flow conservation or comparison against a standard Kalman filter on the same data) is shown. This is load-bearing for the interpretability claim.
- [§4] §4 (Data and Implementation): the description of how the two heterogeneous data sources are synchronized and how the fixed-size grouping is performed lacks sufficient detail on temporal alignment, missing-data handling, and the exact neural-network architecture used for the gains. These choices directly affect reproducibility and the claimed spatial transferability.
minor comments (3)
- [§2] Notation: define the state vector x_k and the measurement vector z_k explicitly, including units, at the first appearance in §2 or §3.
- [Figures] Figures: ensure all queue-length time-series plots include the ground-truth reference, multiple runs or confidence bands, and clear axis labels with units.
- [References] References: add citations to recent Kalman-filter traffic papers that also learn gains or parameters to better situate the novelty.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. The comments highlight important areas for strengthening the empirical support, interpretability claims, and reproducibility of Q-Net. We address each major comment below and will incorporate the suggested improvements in the revised manuscript.
read point-by-point responses
-
Referee: [Abstract and §5] Abstract and §5 (Evaluation): the abstract states that evaluations on Rotterdam roads show outperformance and accurate tracking, yet the manuscript provides no quantitative metrics (RMSE, MAE, error bars), baseline details, ablation results, or statistical significance tests. Without these, the central empirical claim cannot be assessed.
Authors: We agree that the current presentation of results is insufficient for assessing the central claims. In the revision we will expand both the abstract and §5 to report RMSE, MAE, error bars, full baseline specifications, ablation studies, and statistical significance tests on the Rotterdam dataset. revision: yes
-
Referee: [§3] §3 (Model Formulation): the assertion that the AI-augmented structure addresses violations of traffic conservation assumptions rests on the design choice alone; no explicit verification (e.g., residual analysis of flow conservation or comparison against a standard Kalman filter on the same data) is shown. This is load-bearing for the interpretability claim.
Authors: The referee is correct that design alone does not substantiate the claim. We will add to §3 residual analysis of flow conservation and side-by-side comparisons against a standard Kalman filter on the same data to provide explicit verification of how the learned gains mitigate conservation violations. revision: yes
-
Referee: [§4] §4 (Data and Implementation): the description of how the two heterogeneous data sources are synchronized and how the fixed-size grouping is performed lacks sufficient detail on temporal alignment, missing-data handling, and the exact neural-network architecture used for the gains. These choices directly affect reproducibility and the claimed spatial transferability.
Authors: We accept that additional implementation details are required. The revised §4 will specify the temporal alignment procedure between loop-detector counts and aFCD speeds, the strategy for missing-data imputation, and the precise neural-network architecture (layers, activations, hyperparameters, and training protocol) used to predict the time-varying gains. revision: yes
Circularity Check
No significant circularity
full rationale
The paper derives Q-Net from a standard Kalman predict-update structure applied to a physically motivated state-space model that fuses loop-detector counts and aFCD speeds. The neural augmentation is restricted to learning time-varying gains from the two data sources, which does not reduce any claimed prediction or result to the inputs by construction. No self-citations, uniqueness theorems, or ansatzes imported from prior author work appear in the derivation chain. The framework remains self-contained: the state evolution and measurement models preserve interpretability independently of the learned gains, and spatial transferability follows directly from the fixed-size grouping design rather than from any fitted parameter renamed as output.
Axiom & Free-Parameter Ledger
free parameters (1)
- neural network parameters for time-varying Kalman gains
axioms (1)
- domain assumption State-space model can represent queue dynamics and address violations of traffic conservation assumptions
Reference graph
Works this paper leans on
-
[1]
Multivariate time-varying kalman filter approach for cycle-based maximum queue length estimation
Wanuji Abewickrema, Mehmet Yildirimoglu, and Jiwon Kim. Multivariate time-varying kalman filter approach for cycle-based maximum queue length estimation. Transportation research part C: emerging technologies, 154: 0 104238, 2023
work page 2023
-
[2]
Afzal Ahmed, Fatma Outay, Syeda Ofaq Raza Zaidi, Muhammad Adnan, and Dong Ngoduy. Examining queue-jumping phenomenon in heterogeneous traffic stream at signalized intersection using uav-based data. Personal and Ubiquitous Computing, 25: 0 93--108, 2021
work page 2021
-
[3]
Video-based traffic queue length estimation
Antonio Albiol, Alberto Albiol, and Jose M Mossi. Video-based traffic queue length estimation. In 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), pages 1928--1932. IEEE, 2011
work page 2011
-
[4]
Detecting queue length on urban arterials using floating car data (FCD)
Oru c Alt nta s . Detecting queue length on urban arterials using floating car data (FCD). PhD thesis, Middle East Technical University (Turkey), 2018
work page 2018
-
[5]
Real-time queue length estimation using event-based advance detector data
Chengchuan An, Yao-Jan Wu, Jingxin Xia, and Wei Huang. Real-time queue length estimation using event-based advance detector data. Journal of Intelligent Transportation Systems, 22 0 (4): 0 277--290, 2018
work page 2018
-
[6]
A survey and comparison of low-cost sensing technologies for road traffic monitoring
Marcin Bernas, Bart omiej P aczek, Wojciech Korski, Piotr Loska, Jaros aw Smy a, and Piotr Szyma a. A survey and comparison of low-cost sensing technologies for road traffic monitoring. Sensors, 18 0 (10): 0 3243, 2018
work page 2018
-
[7]
Latent-kalmannet: Learned kalman filtering for tracking from high-dimensional signals
Itay Buchnik, Guy Revach, Damiano Steger, Ruud JG Van Sloun, Tirza Routtenberg, and Nir Shlezinger. Latent-kalmannet: Learned kalman filtering for tracking from high-dimensional signals. IEEE Transactions on Signal Processing, 72: 0 352--367, 2023
work page 2023
-
[8]
Qing Cai, Zhongyu Wang, Lingyu Zheng, Bing Wu, and Yinhai Wang. Shock wave approach for estimating queue length at signalized intersections by fusing data from point and mobile sensors. Transportation Research Record, 2422 0 (1): 0 79--87, 2014
work page 2014
-
[9]
Driving behavior at signalized intersections operating under disordered traffic conditions
Ritvik Chauhan, Ashish Dhamaniya, and Shriniwas Arkatkar. Driving behavior at signalized intersections operating under disordered traffic conditions. Transportation research record, 2675 0 (12): 0 1356--1378, 2021
work page 2021
-
[10]
Cycle-by-cycle queue length estimation for signalized intersections using sampled trajectory data
Yang Cheng, Xiao Qin, Jing Jin, Bin Ran, and Jason Anderson. Cycle-by-cycle queue length estimation for signalized intersections using sampled trajectory data. Transportation research record, 2257 0 (1): 0 87--94, 2011
work page 2011
-
[11]
An exploratory shockwave approach to estimating queue length using probe trajectories
Yang Cheng, Xiao Qin, Jing Jin, and Bin Ran. An exploratory shockwave approach to estimating queue length using probe trajectories. Journal of intelligent transportation systems, 16 0 (1): 0 12--23, 2012
work page 2012
-
[12]
Improving noise assessment at intersections by modeling traffic dynamics
Estelle Chevallier, Arnaud Can, M Nadji, and Ludovic Leclercq. Improving noise assessment at intersections by modeling traffic dynamics. Transportation Research Part D: Transport and Environment, 14 0 (2): 0 100--110, 2009
work page 2009
-
[13]
Split-kalmannet: A robust model-based deep learning approach for state estimation
Geon Choi, Jeonghun Park, Nir Shlezinger, Yonina C Eldar, and Namyoon Lee. Split-kalmannet: A robust model-based deep learning approach for state estimation. IEEE transactions on vehicular technology, 72 0 (9): 0 12326--12331, 2023
work page 2023
-
[14]
Real-time queue-end detection on freeways with floating car data: Practice-ready algorithm
Tu-Uyen J Dinh, Romain Billot, Eric Pillet, and Nour-Eddin El Faouzi. Real-time queue-end detection on freeways with floating car data: Practice-ready algorithm. Transportation Research Record, 2470 0 (1): 0 46--56, 2014
work page 2014
-
[15]
Traffic detector handbook: Third edition---volume ii
Federal Highway Administration . Traffic detector handbook: Third edition---volume ii. Technical Report FHWA-HRT-06-139, U.S. Department of Transportation, Federal Highway Administration, Washington, DC, 2006. URL https://www.fhwa.dot.gov/publications/research/operations/its/06139/chapt5b.cfm. Accessed: 2025-09-18
work page 2006
-
[16]
Identification and analysis of queue spillovers in city street networks
Nikolas Geroliminis and Alexander Skabardonis. Identification and analysis of queue spillovers in city street networks. IEEE Transactions on Intelligent Transportation Systems, 12 0 (4): 0 1107--1115, 2011
work page 2011
-
[17]
Multi-sensor traffic data fusion for congestion detection and tracking
J Gitahi, M Hahn, M Storz, C Bernhard, M Feldges, and R Nordentoft. Multi-sensor traffic data fusion for congestion detection and tracking. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 43: 0 173--180, 2020
work page 2020
-
[18]
A queue length estimation and prediction model for long freeway off-ramps
Seiran Heshami and Lina Kattan. A queue length estimation and prediction model for long freeway off-ramps. Journal of Intelligent Transportation Systems, 25 0 (1): 0 122--134, 2021
work page 2021
-
[19]
Lessons learned from field operational test of integrated network management in amsterdam
SP Hoogendoorn, J Van Kooten, and R Adams. Lessons learned from field operational test of integrated network management in amsterdam. Transportation Research Record, 2554 0 (1): 0 111--119, 2016
work page 2016
-
[20]
Simon Hu, Qishen Zhou, Junyi Li, Yibing Wang, Claudio Roncoli, Lihui Zhang, and Lewis Lehe. High time-resolution queue profile estimation at signalized intersections based on extended kalman filtering. IEEE Transactions on Intelligent Transportation Systems, 23 0 (11): 0 21274--21290, 2022
work page 2022
-
[21]
Subcycle waveform modeling of traffic intersections using recurrent attention networks
Yashaswi Karnati, Rahul Sengupta, Anand Rangarajan, and Sanjay Ranka. Subcycle waveform modeling of traffic intersections using recurrent attention networks. IEEE Transactions on Intelligent Transportation Systems, 23 0 (3): 0 2538--2548, 2021
work page 2021
-
[22]
Seunghyeon Lee, Kun Xie, Dong Ngoduy, and Mehdi Keyvan-Ekbatani. An advanced deep learning approach to real-time estimation of lane-based queue lengths at a signalized junction. Transportation research part C: emerging technologies, 109: 0 117--136, 2019
work page 2019
-
[23]
Backpressure control with estimated queue lengths for urban network traffic
Li Li, Victor Okoth, and Saif Eddin Jabari. Backpressure control with estimated queue lengths for urban network traffic. IET Intelligent Transport Systems, 15 0 (2): 0 320--330, 2021
work page 2021
-
[24]
Kalman filter and its application
Qiang Li, Ranyang Li, Kaifan Ji, and Wei Dai. Kalman filter and its application. In 2015 8th international conference on intelligent networks and intelligent systems (ICINIS), pages 74--77. IEEE, 2015
work page 2015
-
[25]
Michael James Lighthill and G Be Whitham. On kinematic waves i. flood movement in long rivers. ii a theory of traffic flow on long crowded roads. Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences, 229 0 (1178): 0 281--345, 1955
work page 1955
-
[26]
Real-time queue length estimation for congested signalized intersections
Henry X Liu, Xinkai Wu, Wenteng Ma, and Heng Hu. Real-time queue length estimation for congested signalized intersections. Transportation research part C: emerging technologies, 17 0 (4): 0 412--427, 2009
work page 2009
-
[27]
A multisource data approach for estimating vehicle queue length at metered on-ramps
Xiaoling Luo, Xiaobo Ma, Matthew Munden, Yao-Jan Wu, and Yangsheng Jiang. A multisource data approach for estimating vehicle queue length at metered on-ramps. Journal of Transportation Engineering, Part A: Systems, 148 0 (2): 0 04021117, 2022
work page 2022
-
[28]
Athanasios Matzoros and Dirck Van Vliet. A model of air pollution from road traffic, based on the characteristics of interrupted flow and junction control: Part i—model description. Transportation Research Part A: Policy and Practice, 26 0 (4): 0 315--330, 1992
work page 1992
-
[29]
Mobiliteitsscan . Floating car data (fcd). URL https://mobiliteitsscan-info.nl/analyse/modulegroepen/modulegroep-externe-bronnen/floating-car-data/. Accessed: 2025-05-21
work page 2025
-
[30]
J \"u rgen M \"U CK. Using detectors near the stop-line to estimate traffic flows. Traffic engineering & control, 43 0 (11): 0 429--434, 2002
work page 2002
-
[31]
i am sick and tired of this congestion
Haidar Nadrian, Mohammad Hossein Taghdisi, Kowsar Pouyesh, Maryam Khazaee-Pool, and Towhid Babazadeh. “i am sick and tired of this congestion”: Perceptions of sanandaj inhabitants on the family mental health impacts of urban traffic jam. Journal of Transport & Health, 14: 0 100587, 2019
work page 2019
-
[32]
Optimal control for reducing congestion and improving safety in freeway systems
Cecilia Pasquale, Simona Sacone, Silvia Siri, and Markos Papageorgiou. Optimal control for reducing congestion and improving safety in freeway systems. IEEE Transactions on Intelligent Transportation Systems, 19 0 (11): 0 3613--3625, 2018
work page 2018
-
[33]
Recursive constrained state estimation using modified extended kalman filter
Jagdeesan Prakash, Biao Huang, and Sirish L Shah. Recursive constrained state estimation using modified extended kalman filter. Computers & chemical engineering, 65: 0 9--17, 2014
work page 2014
-
[34]
Kalmannet: Neural network aided kalman filtering for partially known dynamics
Guy Revach, Nir Shlezinger, Xiaoyong Ni, Adria Lopez Escoriza, Ruud JG Van Sloun, and Yonina C Eldar. Kalmannet: Neural network aided kalman filtering for partially known dynamics. IEEE Transactions on Signal Processing, 70: 0 1532--1547, 2022
work page 2022
-
[35]
Rtsnet: Learning to smooth in partially known state-space models
Guy Revach, Xiaoyong Ni, Nir Shlezinger, Ruud JG Van Sloun, and Yonina C Eldar. Rtsnet: Learning to smooth in partially known state-space models. IEEE Transactions on Signal Processing, 71: 0 4441--4456, 2023
work page 2023
-
[36]
Mobile phones as traffic probes: practices, prospects and issues
Geoff Rose. Mobile phones as traffic probes: practices, prospects and issues. Transport Reviews, 26 0 (3): 0 275--291, 2006
work page 2006
-
[37]
Rahul Sengupta, Yashaswi Karnati, Anand Rangarajan, and Sanjay Ranka. Tqam: Temporal attention for cycle-wise queue length estimation using high-resolution loop detector data. In 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), pages 3313--3320. IEEE, 2021
work page 2021
-
[38]
Qiang Shang, Yingping Tang, and Longjiao Yin. A hybrid model for missing traffic flow data imputation based on clustering and attention mechanism optimizing lstm and adaboost. Scientific Reports, 14 0 (1): 0 26473, 2024
work page 2024
-
[39]
Anuj Sharma, Darcy M Bullock, and James A Bonneson. Input--output and hybrid techniques for real-time prediction of delay and maximum queue length at signalized intersections. Transportation Research Record, 2035 0 (1): 0 69--80, 2007
work page 2035
-
[40]
Kalman filtering with state constraints: a survey of linear and nonlinear algorithms
Dan Simon. Kalman filtering with state constraints: a survey of linear and nonlinear algorithms. IET control theory & applications, 4 0 (8): 0 1303--1318, 2010
work page 2010
-
[41]
Does traffic congestion slow the economy? Journal of Planning Literature, 26 0 (4): 0 391--404, 2011
Matthias Sweet. Does traffic congestion slow the economy? Journal of Planning Literature, 26 0 (4): 0 391--404, 2011
work page 2011
-
[42]
Robust queue length estimation for ramp metering in a connected vehicle environment
Yu Tang, Kaan Ozbay, and Li Jin. Robust queue length estimation for ramp metering in a connected vehicle environment. In 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), pages 4402--4407. IEEE, 2023
work page 2023
-
[43]
Muhammad Umair, Muhammad Umar Farooq, Rana Hammad Raza, Qian Chen, and Baher Abdulhai. Efficient video-based vehicle queue length estimation using computer vision and deep learning for an urban traffic scenario. Processes, 9 0 (10): 0 1786, 2021
work page 2021
-
[44]
Validation of floating car data for transport policy analysis and transport models
Han van der Loop, Marco Kouwenhoven, and Peter van Bekkum. Validation of floating car data for transport policy analysis and transport models. Technical report, KiM Netherlands Institute for Transport Policy Analysis, 2017. URL https://www.kimnet.nl/publicaties/papers/2017/10/04/validation-of-floating-car-data-for-transport-policy-analysis-and-transport-m...
work page 2017
-
[45]
Estimating the vehicle accumulation: Data-fusion of loop-detector flow and floating car speed data
PB van Erp, Victor L Knoop, and Serge P Hoogendoorn. Estimating the vehicle accumulation: Data-fusion of loop-detector flow and floating car speed data. In Proceedings of the 97th TRB Annual Meeting, Washington, DC, USA, pages 7--11, 2018
work page 2018
-
[46]
Real-time estimation of vehicle-count within signalized links
Georgios Vigos, Markos Papageorgiou, and Yibing Wang. Real-time estimation of vehicle-count within signalized links. Transportation Research Part C: Emerging Technologies, 16 0 (1): 0 18--35, 2008
work page 2008
-
[47]
Kalman filtering method for real-time queue length estimation in a connected vehicle environment
Yi Wang, Zhihong Yao, Yang Cheng, Yangsheng Jiang, and Bin Ran. Kalman filtering method for real-time queue length estimation in a connected vehicle environment. Transportation Research Record, 2675 0 (10): 0 578--589, 2021
work page 2021
-
[48]
Zhongyu Wang, Qing Cai, Bing Wu, Lingyu Zheng, and Yinhai Wang. Shockwave-based queue estimation approach for undersaturated and oversaturated signalized intersections using multi-source detection data. Journal of Intelligent Transportation Systems, 21 0 (3): 0 167--178, 2017
work page 2017
-
[49]
Fo Vo Webster. Traffic signal settings. Technical report, 1958
work page 1958
-
[50]
Queue length estimation for a metered on-ramp using mesoscopic simulation
Guangchuan Yang, Zong Tian, Daobin Wang, and Hao Xu. Queue length estimation for a metered on-ramp using mesoscopic simulation. Transportation Letters, 11 0 (10): 0 570--579, 2019
work page 2019
-
[51]
Juyuan Yin, Jian Sun, and Keshuang Tang. A kalman filter-based queue length estimation method with low-penetration mobile sensor data at signalized intersections. Transportation Research Record, 2672 0 (45): 0 253--264, 2018
work page 2018
-
[52]
Various methods for queue length and traffic volume estimation using probe vehicle trajectories
Yan Zhao, Jianfeng Zheng, Wai Wong, Xingmin Wang, Yuan Meng, and Henry X Liu. Various methods for queue length and traffic volume estimation using probe vehicle trajectories. Transportation Research Part C: Emerging Technologies, 107: 0 70--91, 2019
work page 2019
-
[53]
Yan Zhao, Wai Wong, Jianfeng Zheng, and Henry X Liu. Maximum likelihood estimation of probe vehicle penetration rates and queue length distributions from probe vehicle data. IEEE Transactions on Intelligent Transportation Systems, 23 0 (7): 0 7628--7636, 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.