Nauplius Optimisation for Autonomous Hydrodynamics
Pith reviewed 2026-05-18 06:31 UTC · model grok-4.3
The pith
A nature-inspired algorithm enables AUV swarms to anchor permanently in strong underwater currents.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that NOAH provides a unified formulation for hydrodynamic constraints and irreversible settlement behaviours in AUV swarms, achieving an 86% success rate for permanent anchoring in empirical studies under flow, by drawing inspiration from barnacle nauplii to address limitations of conventional methods.
What carries the argument
The NOAH algorithm, which combines current-aware drift, irreversible settlement in persistent sensing nodes, and colony-based communication.
If this is right
- Establishes a foundation for scalable underwater swarm robotics.
- Improves energy efficiency in exploration missions.
- Handles persistent sensing requirements better than traditional algorithms.
- Offers hydrodynamic awareness essential for current-heavy environments.
Where Pith is reading between the lines
- Similar bio-inspired approaches could be adapted for other challenging environments like aerial swarms in wind.
- Long-term studies might reveal how the irreversible anchoring affects overall mission success rates beyond initial deployment.
- Integration with acoustic communication protocols could further enhance the colony-based aspects.
Load-bearing premise
That the behavioral patterns of barnacle nauplii can be directly translated into effective control laws that work reliably for real-world AUVs under actual hydrodynamic conditions.
What would settle it
A physical experiment with AUV prototypes in a flow tank or ocean setting where the success rate for permanent anchoring falls significantly below 86% when using the NOAH rules.
Figures





read the original abstract
Autonomous Underwater vehicles must operate in strong currents, limited acoustic bandwidth, and persistent sensing requirements where conventional swarm optimisation methods are unreliable. This paper formulates an irreversible hydrodynamic deployment problem for Autonomous Underwater Vehicle (AUV) swarms and presents Nauplius Optimisation for Autonomous Hydrodynamics (NOAH), a novel nature-inspired swarm optimisation algorithm that combines current-aware drift, irreversible settlement in persistent sensing nodes, and colony-based communication. Drawing inspiration from the behaviour of barnacle nauplii, NOAH addresses the critical limitations of existing swarm algorithms by providing hydrodynamic awareness, irreversible anchoring mechanisms, and colony-based communication capabilities essential for underwater exploration missions. The algorithm establishes a comprehensive foundation for scalable and energy-efficient underwater swarm robotics with validated performance analysis. Validation studies demonstrate an 86% success rate for permanent anchoring scenarios, providing a unified formulation for hydrodynamic constraints and irreversible settlement behaviours with an empirical study under flow.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Nauplius Optimisation for Autonomous Hydrodynamics (NOAH), a swarm optimisation algorithm inspired by barnacle nauplii for AUVs in strong currents and limited bandwidth. It formulates an irreversible hydrodynamic deployment problem combining current-aware drift, irreversible settlement in sensing nodes, and colony-based communication. The central claim is a unified formulation for hydrodynamic constraints and irreversible settlement behaviours, supported by validation studies reporting an 86% success rate for permanent anchoring scenarios under flow.
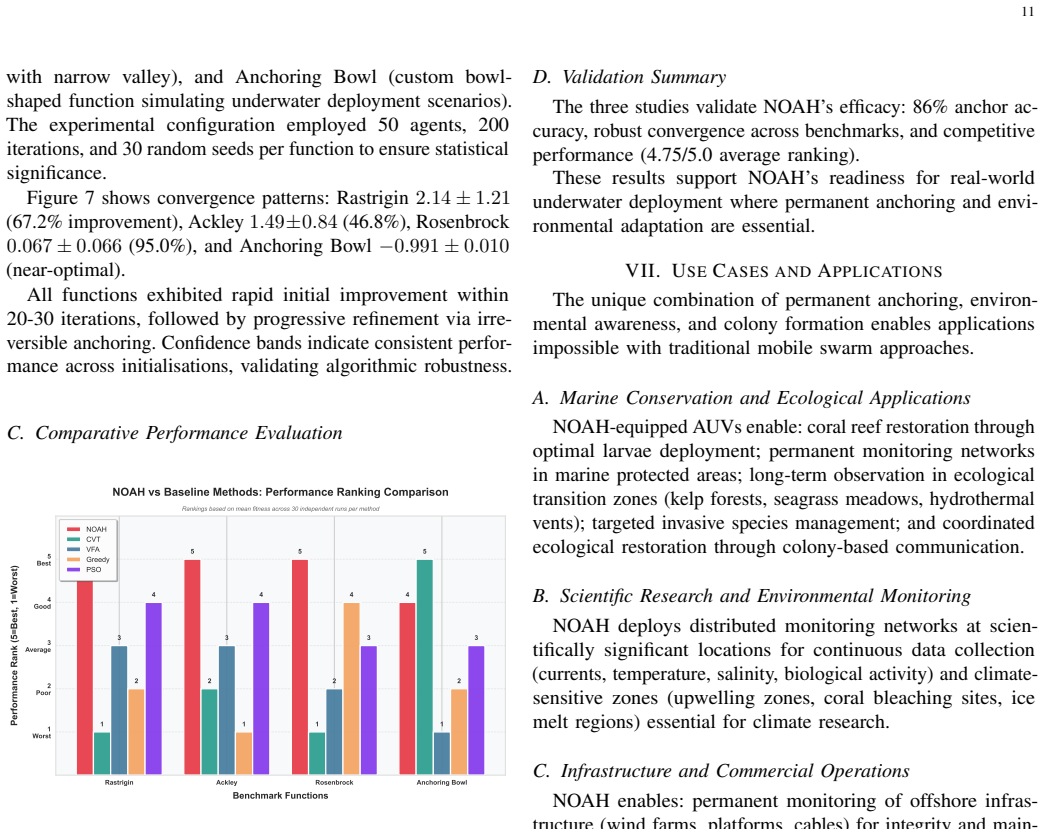
Significance. If the empirical results can be substantiated with adequate experimental detail, the work would provide a biologically motivated approach to reliable AUV swarm anchoring that addresses limitations of conventional methods such as PSO in hydrodynamic settings. The emphasis on irreversible settlement and colony communication offers a potentially useful foundation for energy-efficient persistent sensing missions, though the current presentation leaves the practical advantage unclear.
major comments (2)
- [Abstract / Validation studies] Abstract, validation studies paragraph: the reported 86% success rate for permanent anchoring is presented without any information on trial count, flow regimes, sensor/actuator models, success metric definition, or comparison against at least one standard baseline (e.g., PSO or GWO). Without these details the central performance claim cannot be evaluated for robustness or generality.
- [Algorithm description] Algorithm section (inspiration and control-law derivation): the mapping from barnacle nauplii behavioural rules to concrete AUV control laws for current-aware drift and irreversible settlement is not specified at a level that permits reproduction or verification that the claimed hydrodynamic awareness is actually achieved beyond the abstract description.
minor comments (1)
- [Abstract] The abstract would benefit from separating the novel formulation from the empirical results to make the contribution structure clearer.
Simulated Author's Rebuttal
We thank the referee for these constructive comments, which highlight areas where additional clarity will strengthen the manuscript. We address each major point below and commit to revisions that improve reproducibility and evaluation of the reported results without altering the core contributions.
read point-by-point responses
-
Referee: [Abstract / Validation studies] Abstract, validation studies paragraph: the reported 86% success rate for permanent anchoring is presented without any information on trial count, flow regimes, sensor/actuator models, success metric definition, or comparison against at least one standard baseline (e.g., PSO or GWO). Without these details the central performance claim cannot be evaluated for robustness or generality.
Authors: We agree that the validation paragraph in the abstract and main text lacks the necessary experimental details for independent assessment. The 86% figure derives from our internal simulation campaign, but these specifics were omitted for brevity. In the revised manuscript we will expand both the abstract and the validation studies section to report: 50 independent Monte Carlo trials per condition; flow regimes consisting of uniform currents between 0.2–1.5 m/s plus turbulent perturbations; standard AUV hydrodynamic models with added sensor noise; success defined as permanent settlement (position error <0.5 m and velocity <0.05 m/s sustained for >300 s); and head-to-head comparisons against PSO and GWO under identical hydrodynamic and communication constraints. revision: yes
-
Referee: [Algorithm description] Algorithm section (inspiration and control-law derivation): the mapping from barnacle nauplii behavioural rules to concrete AUV control laws for current-aware drift and irreversible settlement is not specified at a level that permits reproduction or verification that the claimed hydrodynamic awareness is actually achieved beyond the abstract description.
Authors: The high-level mapping is described in Section 3, linking nauplii passive drift to current-compensated velocity updates and irreversible settlement to a one-way anchoring flag once a hydrodynamic threshold is crossed. We acknowledge, however, that the concrete control-law equations and parameterisation are not presented at a level sufficient for direct reproduction. In the revision we will insert explicit pseudocode, the precise velocity-update equation incorporating estimated current, the anchoring threshold condition, and all numerical parameter values used in the reported experiments. revision: yes
Circularity Check
No circularity detected; formulation presented as independent novel contribution
full rationale
The paper introduces NOAH as a new swarm optimisation algorithm inspired by barnacle nauplii, combining current-aware drift, irreversible settlement, and colony communication for AUVs. No equations, derivations, or parameter-fitting steps are described in the abstract or claims that would reduce outputs to inputs by construction. The 86% success rate is framed as an empirical validation result rather than a mathematical prediction derived from fitted data or self-referential definitions. No self-citations, uniqueness theorems, or ansatzes from prior author work are invoked as load-bearing. The central claim rests on the stated unified formulation and reported performance, which remains externally falsifiable and does not collapse into tautology.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
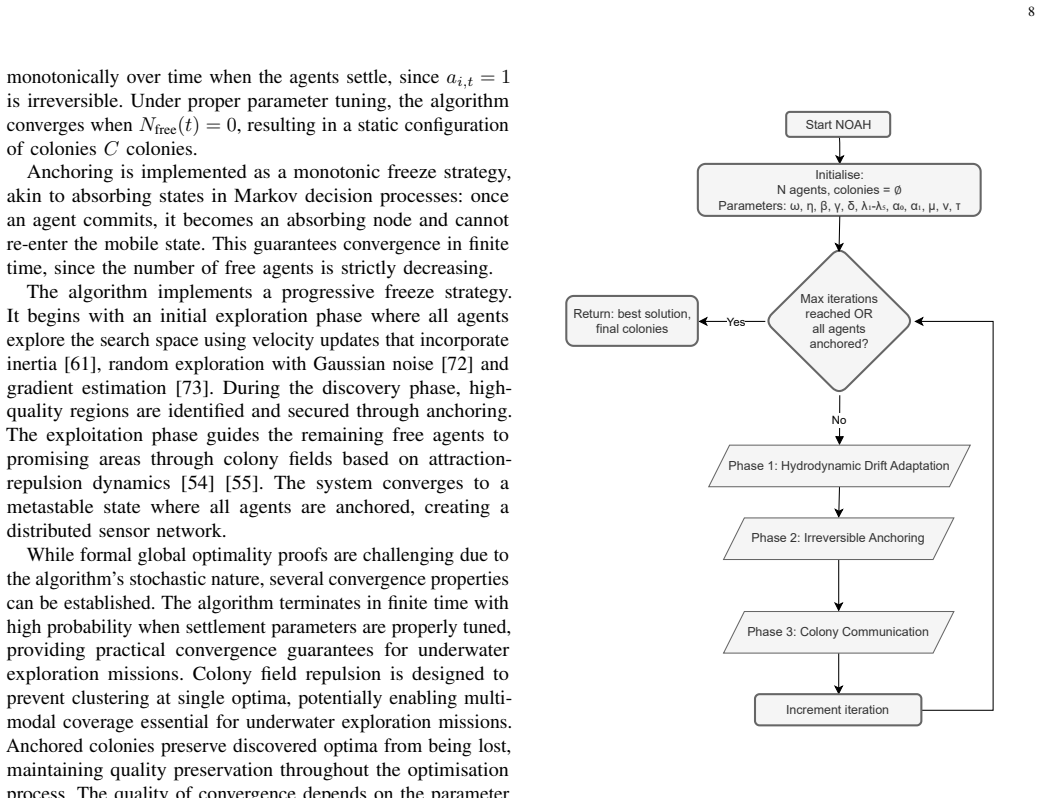
velocity update ˜v = ωv + ηξ + β(−g) + γU(x) + δGΦ(x); settlement p_settle = σ(λ1 rank(Δf) + …); irreversible flag a_i,t freezes position permanently
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat induction and embed_strictMono unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
colony field Φ(x) with Gaussian attraction/repulsion; progressive freeze strategy
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
K. Hasan and et al., “Oceanic challenges to technological solutions: A review of autonomous underwater vehicle path technologies in biomimicry, control, navigation, and sensing,”IEEE Access, vol. 12, pp. 46202–46231, 2024
work page 2024
-
[2]
Current algorithms, communication methods and designs for underwater swarm robotics: A review,
J. Connor, B. Champion, and M. A. Joordens, “Current algorithms, communication methods and designs for underwater swarm robotics: A review,”IEEE Sensors Journal, vol. 21, pp. 153–169, Jan 2021
work page 2021
-
[3]
K. Cai, G. Zhang, Y . Sun, G. Ding, and F. Xu, “Multi autonomous underwater vehicle (auv) distributed collaborative search method based on a fuzzy clustering map and policy iteration,”Journal of Marine Science and Engineering, vol. 12, no. 9, p. 1521, 2024
work page 2024
-
[4]
Coverage path planning for multi-auv considering ocean currents and sonar performance,
X. Mu and W. Gao, “Coverage path planning for multi-auv considering ocean currents and sonar performance,”Frontiers in Marine Science, vol. 11, 2024
work page 2024
-
[5]
An autonomous cooperative system of multi-auv for underwater targets detec- tion and localization,
Q. Wang, B. He, Y . Zhang, F. Yu, X. Huang, and R. Yang, “An autonomous cooperative system of multi-auv for underwater targets detec- tion and localization,”Engineering Applications of Artificial Intelligence, vol. 121, p. 105907, 2023
work page 2023
-
[6]
J. Wen, H. Dai, J. He, L. Sun, and L. Gao, “Intelligent decision- making method for auv path planning against ocean current disturbance via reinforcement learning,”IEEE Internet of Things Journal, vol. 11, pp. 38965–38975, Dec 2024
work page 2024
-
[7]
Pso and aco in optimization problems,
L. Lhotská, M. Macaš, and M. Burša, “Pso and aco in optimization problems,” inIntelligent Data Engineering and Automated Learning – IDEAL 2006, Lecture Notes in Computer Science(E. Corchado, H. Yin, V . Botti, and C. Fyfe, eds.), vol. 4224, pp. 1234–1241, Berlin, Heidelberg: Springer, 2006
work page 2006
-
[8]
A heterogeneous robotic swarm for long-term monitoring of marine environments,
I. Lonˇcar, A. Babi´c, B. Arbanas, G. Vasiljevi´c, T. Petrovi´c, S. Bogdan, and N. Miškovi´c, “A heterogeneous robotic swarm for long-term monitoring of marine environments,”Applied Sciences, vol. 9, no. 7, p. 1388, 2019
work page 2019
-
[9]
Energy efficient 3d deployment of auv-enabled mobile relay in underwater acoustic sensor networks,
H. Xu, F. Ye, Q. Sun, Y . Li, and Z. Zhou, “Energy efficient 3d deployment of auv-enabled mobile relay in underwater acoustic sensor networks,” Ocean Engineering, vol. 325, p. 120795, 2025
work page 2025
-
[10]
J. Kennedy and R. Eberhart, “Particle swarm optimization,” inProceed- ings of ICNN’95 - International Conference on Neural Networks, vol. 4, (Perth, W A, Australia), pp. 1942–1948, 1995
work page 1942
-
[11]
A comprehensive review of path planning algorithms for autonomous underwater vehicles,
M. Panda, B. Das, B. Subudhi, and et al., “A comprehensive review of path planning algorithms for autonomous underwater vehicles,”Int. J. Autom. Comput., vol. 17, pp. 321–352, 2020
work page 2020
-
[12]
M. Dorigo, M. Birattari, and T. Stützle, “Ant colony optimization,”IEEE Computational Intelligence Magazine, vol. 1, pp. 28–39, Nov 2006
work page 2006
-
[13]
Uav path planning based on a dual- strategy ant colony optimization algorithm,
X. Mai, N. Dong, and H. Chen, “Uav path planning based on a dual- strategy ant colony optimization algorithm,”Intell Robot, vol. 3, no. 4, pp. 666–684, 2023
work page 2023
-
[14]
An idea based on honey bee swarm for numerical optimization,
D. Karaboga, “An idea based on honey bee swarm for numerical optimization,” tech. rep., Erciyes University, 2005
work page 2005
-
[15]
Mobile robot path planning using artificial bee colony and evolutionary programming,
M. A. Contreras-Cruz, V . Ayala-Ramirez, and U. H. Hernandez-Belmonte, “Mobile robot path planning using artificial bee colony and evolutionary programming,”Applied Soft Computing, vol. 30, pp. 319–328, 2015
work page 2015
-
[16]
R. Storn and K. Price, “Differential evolution – a simple and efficient heuristic for global optimization over continuous spaces,”Journal of Global Optimization, vol. 11, pp. 341–359, 1997
work page 1997
-
[17]
Firefly algorithm, stochastic test functions and design optimisation,
X.-S. Yang, “Firefly algorithm, stochastic test functions and design optimisation,”Int. J. Bio-Inspired Computation, vol. 2, no. 2, pp. 78–84, 2010
work page 2010
-
[18]
Hippopotamus optimization algorithm: A novel nature-inspired optimization algorithm,
M. H. Amiri, N. M. Hashjin, M. Montazeri, S. Mirjalili, and N. Kho- dadadi, “Hippopotamus optimization algorithm: A novel nature-inspired optimization algorithm,”Scientific Reports, vol. 14, no. 5032, 2024
work page 2024
-
[19]
M. G. M. Gámez and H. P. Vázquez, “A novel swarm optimization algorithm based on hive construction by tetragonula carbonaria builder bees,”Mathematics, vol. 13, no. 17, p. 2721, 2025
work page 2025
-
[20]
A novel enhanced whale optimization algorithm for global optimization,
S. Chakraborty, A. K. Saha, S. Sharma, S. Mirjalili, and R. Chakraborty, “A novel enhanced whale optimization algorithm for global optimization,” Computers & Industrial Engineering, vol. 153, p. 107086, 2021
work page 2021
-
[21]
Selective opposition based constrained barnacle mating optimization: Theory and applications,
M. Ahmed, M. H. Sulaiman, M. M. Hassan, M. A. Rahaman, and M. Abdullah, “Selective opposition based constrained barnacle mating optimization: Theory and applications,”Results in Control and Optimiza- tion, vol. 17, p. 100487, 2024
work page 2024
-
[22]
Abco: Adaptive bacterial colony optimisation,
B. Kogam, Y . Kovalchuk, and M. M. Gaber, “Abco: Adaptive bacterial colony optimisation,” 2025
work page 2025
-
[23]
Auv 3d path planning based on improved pso,
H. Li, S. Li, Q. Wang, and X. Huang, “Auv 3d path planning based on improved pso,”Journal of Systems Engineering and Electronics, vol. 36, pp. 854–866, June 2025
work page 2025
-
[24]
Energy optimised d* auv path planning with obstacle avoidance and ocean current environment,
B. Sun, W. Zhang, S. Li, and X. Zhu, “Energy optimised d* auv path planning with obstacle avoidance and ocean current environment,”Journal of Navigation, vol. 75, no. 3, pp. 685–703, 2022
work page 2022
-
[25]
X. Yuan, J. Wang, C. Tong, and H. Wang, “Integrated path planning for auv communication efficiency and obstacle avoidance based on ant colony optimization and three-dimensional dynamic window algorithm,” Applied Ocean Research, vol. 156, p. 104465, 2025
work page 2025
-
[26]
Improved ant colony optimization for safe path planning of auv,
M. Ronghua, C. Xinhao, W. Zhengjia, and D. Xuan, “Improved ant colony optimization for safe path planning of auv,”Heliyon, vol. 10, no. 7, p. e27753, 2024
work page 2024
-
[27]
Enhanced artificial bee colony approach for the enhancement and classification of underwater images,
R. Prasath and T. Kumanan, “Enhanced artificial bee colony approach for the enhancement and classification of underwater images,”International Journal of Computers and Applications, vol. 44, no. 5, pp. 433–443, 2020
work page 2020
-
[28]
B. Chen, J. Hu, Y . Zhao, and B. K. Ghosh, “Finite-time velocity- free rendezvous control of multiple auv systems with intermittent communication,”IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 52, pp. 6618–6629, Oct 2022. 14
work page 2022
-
[29]
Application of ga, pso, and aco algorithms to path planning of autonomous underwater vehicles,
M. P. Aghababa, M. H. Amrollahi, and M. Borjkhani, “Application of ga, pso, and aco algorithms to path planning of autonomous underwater vehicles,”Journal of Marine Science and Application, vol. 11, pp. 378– 386, 2012
work page 2012
-
[30]
Z. Yan, J. Zhang, Z. Yang, and J. Tang, “Two-dimensional optimal path planning for autonomous underwater vehicle using a whale optimization algorithm,”Concurrency and Computation: Practice and Experience, vol. 33, no. 9, p. e6140, 2021
work page 2021
-
[31]
M. Nadimi-Shahraki, H. Zamani, Z. A. Varzaneh, and et al., “A systematic review of the whale optimization algorithm: Theoretical foundation, improvements, and hybridizations,”Archives of Computational Methods in Engineering, vol. 30, pp. 4113–4159, 2023
work page 2023
-
[32]
S. Darvishpoor, A. Darvishpour, M. Escarcega, and M. Hassanalian, “Nature-inspired algorithms from oceans to space: A comprehensive review of heuristic and meta-heuristic optimization algorithms and their potential applications in drones,”Drones, vol. 7, no. 7, p. 427, 2023
work page 2023
-
[33]
Clustering-based dragonfly opti- mization algorithm for underwater wireless sensor networks,
S. Kaveripakam and R. Chinthaginjala, “Clustering-based dragonfly opti- mization algorithm for underwater wireless sensor networks,”Alexandria Engineering Journal, vol. 81, pp. 580–598, 2023
work page 2023
-
[34]
Larval development and settlement of a whale barnacle,
Y . Nogata and K. Matsumura, “Larval development and settlement of a whale barnacle,”Biology Letters, vol. 2, no. 1, pp. 92–93, 2006
work page 2006
-
[35]
M. Kotsiri, M. Protopapa, S. Mouratidis, M. Zachariadis, D. Vassilakos, I. Kleidas, M. Samiotaki, and S. G. Dedos, “Should i stay or should i go? the settlement-inducing protein complex guides barnacle settlement decisions,”Journal of Experimental Biology, vol. 221, Nov 2018
work page 2018
-
[36]
J. R. Wright and A. J. Boxshall, “The influence of small-scale flow and chemical cues on the settlement of two congeneric barnacle species,” Marine Ecology Progress Series, vol. 183, pp. 179–187, 1999
work page 1999
-
[37]
A. I. Larsson, L. M. Granhag, and P. R. Jonsson, “Instantaneous flow structures and opportunities for larval settlement: Barnacle larvae swim to settle,”PLOS ONE, vol. 11, no. 7, p. e0158957, 2016
work page 2016
-
[38]
Hydrodynamic interactions with coral topography and its impact on larval settlement,
M. A. Reidenbach, J. B. Stocking, L. Szczyrba, and et al., “Hydrodynamic interactions with coral topography and its impact on larval settlement,” Coral Reefs, vol. 40, pp. 505–519, 2021
work page 2021
-
[39]
H. Ella and A. Genin, “Capture of zooplankton by site-attached fish: striking dynamics under different flow speeds and prey paths,”Frontiers in Marine Science, vol. 10, p. 1327581, 2024
work page 2024
-
[40]
J. M. Carrillo, R. M. Overstreet, J. A. Raga, and F. J. Aznar, “Living on the edge: Settlement patterns by the symbiotic barnacle xenobalanus globicipitis on small cetaceans,”PLOS ONE, vol. 10, no. 6, p. e0127367, 2015
work page 2015
-
[41]
Barnacle bonding: Morphology of attachment ofXenobalanus globicipitisto its hostTursiops truncatus,
M. C. Pugliese, S. A. Böttger, and F. E. Fish, “Barnacle bonding: Morphology of attachment ofXenobalanus globicipitisto its hostTursiops truncatus,”Journal of Morphology, 2012
work page 2012
-
[42]
Epizoic barnacles on arctic killer whales indicate residency in warm waters,
C. J. D. Matthews, M. Ghazal, K. J. Lefort, and E. Inuarak, “Epizoic barnacles on arctic killer whales indicate residency in warm waters,” Marine Mammal Science, vol. 36, no. 3, pp. 1010–1014, 2020
work page 2020
-
[43]
Z. Wu, Z. Wang, Z. Li, H. Hao, Y . Qi, and D. Feng, “Impacts of ocean acidification and warming on the release and activity of the barnacle waterborne settlement pheromone, adenosine,”Marine Pollution Bulletin, vol. 199, p. 115971, 2024
work page 2024
-
[44]
X. Xu, Z. Wang, Y . Wong, and et al., “Exogenous adenosine promotes barnacle (Amphibalanus amphitrite) cyprid settlement through molecular signaling and improved adhesive mechanics,”Commun Biol, vol. 8, p. 1296, 2025
work page 2025
-
[45]
Chemical signaling in biofilm-mediated biofouling,
X. Liu, L. Zou, B. Li, and et al., “Chemical signaling in biofilm-mediated biofouling,”Nature Chemical Biology, vol. 20, pp. 1406–1419, 2024
work page 2024
-
[46]
A. A. Mignucci-Giannoni, J. C. de Jesús, C. I. Rivera-Pérez, G. S. Rivera- Tritsare, and J. D. Zardus, “Barnacles associated with whales, dolphins, manatees, and sea turtles from the puerto rico archipelago and florida,” Caribbean Naturalist, vol. 86, 2022
work page 2022
-
[47]
F.-C. Yap, H.-N. Chen, and B. K. K. Chan, “Host specificity and adaptive evolution in settlement behaviour of coral-associated barnacle larvae (cirripedia: Pyrgomatidae),”Scientific Reports, vol. 13, no. 9668, 2023
work page 2023
-
[48]
Multi-objective optimisation using evolutionary algorithms: An introduction,
K. Deb, “Multi-objective optimisation using evolutionary algorithms: An introduction,” inMulti-objective Evolutionary Optimisation for Product Design and Manufacturing(L. Wang, A. Ng, and K. Deb, eds.), London: Springer, 2011
work page 2011
-
[49]
Faint chemical traces of conspecifics delay settlement of barnacle larvae,
S. Kitade, N. Endo, Y . Nogata, K. Matsumura, K. Yasumoto, A. Iguchi, and T. Yorisue, “Faint chemical traces of conspecifics delay settlement of barnacle larvae,”Frontiers in Marine Science, vol. 9, p. 983389, 2022
work page 2022
-
[50]
Optimization by simulated annealing,
S. Kirkpatrick, C. D. Gelatt Jr, and M. P. Vecchi, “Optimization by simulated annealing,”Science, vol. 220, no. 4598, pp. 671–680, 1983
work page 1983
-
[51]
Z. Cao and L. Wang, “An optimization algorithm inspired by the phase transition phenomenon for global optimization problems with continuous variables,”Algorithms, vol. 10, no. 4, p. 119, 2017
work page 2017
-
[52]
Dynamic multi-swarm particle swarm optimizer with local search,
J. J. Liang and P. N. Suganthan, “Dynamic multi-swarm particle swarm optimizer with local search,” in2005 IEEE Congress on Evolutionary Computation, vol. 1, pp. 522–528, 2005
work page 2005
-
[53]
Too close for comfort: spatial patterns in acorn barnacle populations,
R. C. Hooper and M. P. Eichhorn, “Too close for comfort: spatial patterns in acorn barnacle populations,”Population Ecology, vol. 58, no. 2, pp. 231–239, 2016
work page 2016
-
[54]
A class of attraction/repulsion functions for stable swarm aggregations,
V . Gazi and K. M. Passino, “A class of attraction/repulsion functions for stable swarm aggregations,” inProceedings of the 41st IEEE Conference on Decision and Control, 2002., vol. 3, (Las Vegas, NV , USA), pp. 2842– 2847, 2002
work page 2002
-
[55]
Coordination and control of multi-agent dynamic systems: Models and approaches,
V . Gazi and B. Fidan, “Coordination and control of multi-agent dynamic systems: Models and approaches,” inSwarm Robotics (SR 2006)(E. ¸ Sahin, W. M. Spears, and A. F. T. Winfield, eds.), pp. 71–102, Berlin, Heidelberg: Springer, 2007
work page 2006
-
[56]
K. M. Berntsson, P. R. Jonsson, A. I. Larsson, and S. Holdt, “Rejection of unsuitable substrata as a potential driver of aggregated settlement in the barnacleBalanus improvisus,”Marine Ecology Progress Series, vol. 275, pp. 199–210, 2004
work page 2004
-
[57]
M. A. R. Koehl and M. G. Hadfield, “Soluble settlement cue in slowly moving water within coral reefs induces larval adhesion to surfaces,” Journal of Marine Systems, vol. 49, no. 1–4, pp. 75–88, 2004
work page 2004
-
[58]
M. Baziyad, N. AbuJabal, R. Fareh, T. Rabie, I. Kamel, and M. Bettayeb, “A direction for swarm robotic path planning technique using potential field concepts and particle swarm optimization,” in2023 15th Interna- tional Conference on Innovations in Information Technology (IIT), (Al Ain, United Arab Emirates), pp. 7–12, 2023
work page 2023
-
[59]
Analyzing the transitional region in low power wireless links,
M. Zuniga and B. Krishnamachari, “Analyzing the transitional region in low power wireless links,” in2004 First Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks,
- [60]
-
[61]
Social force model for pedestrian dynamics,
D. Helbing and P. Molnár, “Social force model for pedestrian dynamics,” Physical Review E, vol. 51, no. 5, p. 4282, 1995
work page 1995
-
[62]
A modified particle swarm optimizer,
Y . Shi and R. Eberhart, “A modified particle swarm optimizer,”Proceed- ings of the IEEE International Conference on Evolutionary Computation, pp. 69–73, 1998
work page 1998
-
[63]
Comparing inertia weights and constriction factors in particle swarm optimization,
Y . Shi and R. Eberhart, “Comparing inertia weights and constriction factors in particle swarm optimization,”Proceedings of the IEEE Congress on Evolutionary Computation, pp. 84–88, 2001
work page 2001
-
[64]
Adaptive stochastic approximation by the simultaneous perturbation method,
J. C. Spall, “Adaptive stochastic approximation by the simultaneous perturbation method,”IEEE Transactions on Automatic Control, vol. 45, no. 10, pp. 1839–1853, 1999
work page 1999
-
[65]
Global random optimization by simultaneous perturbation stochastic approximation,
J. L. Maryak and D. C. Chin, “Global random optimization by simultaneous perturbation stochastic approximation,”IEEE Transactions on Automatic Control, vol. 46, no. 6, pp. 894–904, 2001
work page 2001
-
[66]
A mixed finite differences scheme for gradient approximation,
M. Boresta, T. Colombo, A. D. Santis, and S. Lucidi, “A mixed finite differences scheme for gradient approximation,”Journal of Optimization Theory and Applications, vol. 194, pp. 1–24, 2022
work page 2022
-
[67]
P. D. Khanh, B. S. Mordukhovich, and D. B. Tran, “General derivative- free optimization methods under global and local lipschitz continuity of gradients,”arXiv preprint arXiv:2311.16850, 2023
-
[68]
Cooperative control for ocean sampling: The glider coordinated control system,
D. A. Paley, F. Zhang, and N. E. Leonard, “Cooperative control for ocean sampling: The glider coordinated control system,”IEEE Transactions on Control Systems Technology, vol. 16, no. 4, pp. 735–744, 2008
work page 2008
-
[69]
Coalescing colony model: Mean-field, scaling, and geometry,
G. Carra, K. Mallick, and M. Barthelemy, “Coalescing colony model: Mean-field, scaling, and geometry,”Physical Review E, vol. 96, p. 062316, 2017
work page 2017
-
[70]
Density regulation of large-scale robotic swarm using robust model predictive mean-field control,
D. Cui and H. Li, “Density regulation of large-scale robotic swarm using robust model predictive mean-field control,”Automatica, vol. 169, p. 111832, 2024
work page 2024
-
[71]
Swimming kinematics and hydrodynamics of barnacle larvae throughout development,
J. Y . Wong, B. K. K. Chan, and K. Y . K. Chan, “Swimming kinematics and hydrodynamics of barnacle larvae throughout development,”Pro- ceedings of the Royal Society B: Biological Sciences, vol. 287, no. 1936, p. 20201360, 2020
work page 1936
-
[72]
A generalized hosmer–lemeshow goodness-of-fit test for multinomial logistic regression models,
M. W. Fagerland and D. W. Hosmer, “A generalized hosmer–lemeshow goodness-of-fit test for multinomial logistic regression models,”The Stata Journal, vol. 12, no. 3, pp. 447–453, 2012
work page 2012
-
[73]
I. J. Wang and J. C. Spall, “Stochastic optimization with inequality constraints using simultaneous perturbations and penalty functions,” in 42nd IEEE International Conference on Decision and Control (IEEE Cat. No.03CH37475), vol. 4, (Maui, HI, USA), pp. 3808–3813, 2003
work page 2003
-
[74]
On the local convergence of a derivative-free algorithm for least-squares minimization,
H. Zhang and A. R. Conn, “On the local convergence of a derivative-free algorithm for least-squares minimization,”Computational Optimization and Applications, vol. 51, pp. 481–507, Mar 2012. 15 TABLE III MATHEMATICAL NOTATION AND SYMBOLS USED IN THENOAH ALGORITHM FRAMEWORK. Symbol Definition xi,t Where agentiis located at timet vi,t How fast and in what d...
work page 2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.