Quality-guided UAV Surface Exploration for 3D Reconstruction
Pith reviewed 2026-05-21 18:30 UTC · model grok-4.3
The pith
A Next-Best-View planner for UAVs selects viewpoints using a reconstruction quality objective derived directly from TSDF uncertainty.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that new efficient methods for view generation and selection of viewpoint candidates, which are adaptive to user-defined quality requirements and fully exploit the uncertainty encoded in a TSDF representation, produce informed exploration decisions tailored to the predetermined objective and yield higher-quality 3D maps with better path efficiency than conventional NBV strategies.
What carries the argument
The quality-guided viewpoint selection process that converts TSDF uncertainty into an explicit reconstruction-quality objective for choosing the next camera pose.
If this is right
- Exploration paths adjust their density and order according to the chosen quality target.
- Final 3D maps reach higher accuracy with the same or fewer viewpoints.
- Overall flight distance decreases while coverage and map quality both improve.
- The same framework can serve different applications by simply changing the quality threshold.
Where Pith is reading between the lines
- The same uncertainty-to-quality mapping could be tried on ground robots or underwater vehicles by swapping the sensor model.
- Real flights might reveal whether wind or localization drift breaks the direct link between TSDF values and actual map error.
- Combining the quality objective with energy or safety costs could produce multi-objective planners that still stay goal-aware.
Load-bearing premise
Uncertainty values stored in the TSDF can be turned into a reliable guide for reconstruction quality without extra sensor calibration or post-processing steps.
What would settle it
A simulation run in which the final 3D reconstruction error does not decrease when the method follows the TSDF-derived quality scores, showing no advantage over standard coverage-driven NBV.
Figures



read the original abstract
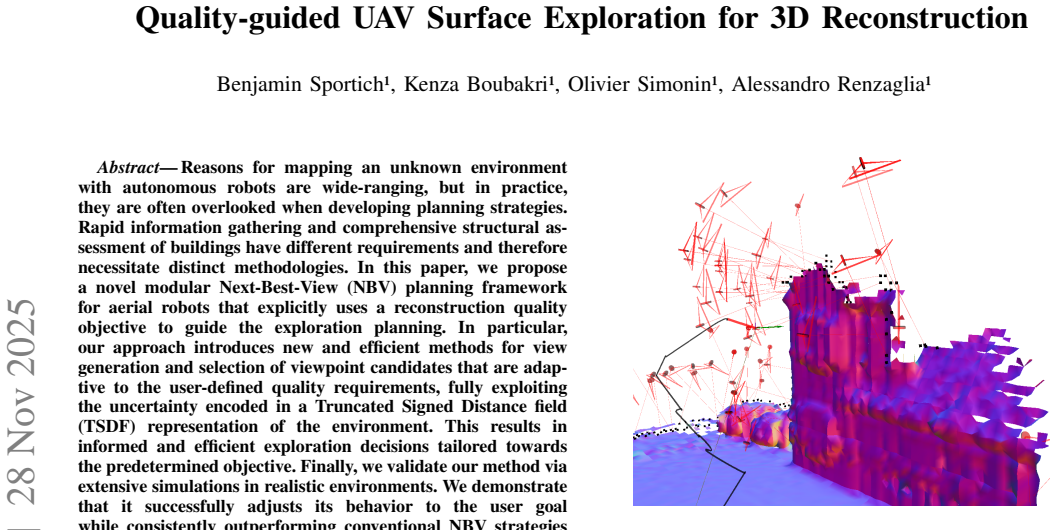
Reasons for mapping an unknown environment with autonomous robots are wide-ranging, but in practice, they are often overlooked when developing planning strategies. Rapid information gathering and comprehensive structural assessment of buildings have different requirements and therefore necessitate distinct methodologies. In this paper, we propose a novel modular Next-Best-View (NBV) planning framework for aerial robots that explicitly uses a reconstruction quality objective to guide the exploration planning. In particular, our approach introduces new and efficient methods for view generation and selection of viewpoint candidates that are adaptive to the user-defined quality requirements, fully exploiting the uncertainty encoded in a Truncated Signed Distance field (TSDF) representation of the environment. This results in informed and efficient exploration decisions tailored towards the predetermined objective. Finally, we validate our method via extensive simulations in realistic environments. We demonstrate that it successfully adjusts its behavior to the user goal while consistently outperforming conventional NBV strategies in terms of coverage, quality of the final 3D map and path efficiency.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a modular Next-Best-View (NBV) planning framework for UAVs that guides surface exploration for 3D reconstruction using a user-defined reconstruction quality objective. The core contribution is a set of methods for generating and selecting viewpoint candidates that adaptively exploit uncertainty information stored in a Truncated Signed Distance Field (TSDF) representation of the environment. The approach is claimed to produce exploration trajectories that are both more efficient and better aligned with the target reconstruction quality than standard NBV baselines. Validation is performed through extensive simulations in realistic environments, with reported improvements in coverage, final map quality, and path length.
Significance. If the central mapping from TSDF uncertainty to a controllable quality objective is shown to be robust and generalizable, the work would provide a practical advance for task-driven autonomous mapping. The modular design and explicit incorporation of user-specified quality targets address a gap between generic coverage-driven planners and application-specific requirements such as structural inspection. The simulation results, if accompanied by quantitative metrics and clear baselines, would strengthen the case for deploying such planners on real UAV platforms.
major comments (2)
- [Section 3 (Method)] The central claim that the method 'fully exploits the uncertainty encoded in a TSDF' to produce adaptive, quality-guided viewpoint selection rests on an unstated conversion from TSDF values (truncated distances and integration weights) into a scalar reconstruction-quality objective. No explicit formula, calibration procedure, or independence from sensor noise model is provided; without this step the claimed outperformance over conventional NBV may reduce to an implicit heuristic rather than a principled objective.
- [Section 5 (Experiments)] The simulation validation asserts consistent superiority in coverage, quality, and efficiency, yet the abstract and method description contain no quantitative metrics, baseline algorithms, or statistical analysis. A load-bearing claim of this form requires at least one table or figure reporting concrete numbers (e.g., mean coverage percentage, RMSE, path length) with standard deviations and direct comparison to at least two established NBV methods.
minor comments (2)
- [Abstract / Section 2] The abstract states that the framework is 'modular' but does not enumerate the modules or their interfaces; a short diagram or bullet list in Section 2 would clarify reusability.
- [Section 3] Notation for the quality objective and the TSDF-derived uncertainty term should be introduced once and used consistently; currently the same concept appears under slightly varying descriptions.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We have carefully reviewed the major comments and provide point-by-point responses below. Revisions have been made to clarify the method and strengthen the experimental presentation.
read point-by-point responses
-
Referee: [Section 3 (Method)] The central claim that the method 'fully exploits the uncertainty encoded in a TSDF' to produce adaptive, quality-guided viewpoint selection rests on an unstated conversion from TSDF values (truncated distances and integration weights) into a scalar reconstruction-quality objective. No explicit formula, calibration procedure, or independence from sensor noise model is provided; without this step the claimed outperformance over conventional NBV may reduce to an implicit heuristic rather than a principled objective.
Authors: We appreciate the referee for identifying this gap in clarity. The original manuscript described the use of TSDF uncertainty at a conceptual level but did not provide an explicit mathematical mapping to the scalar quality objective. In the revised version, we have added a new subsection (3.2) that presents the precise formula converting truncated signed distances and integration weights into the reconstruction quality score. We also describe the calibration procedure employed during map integration and include a brief analysis showing that the objective remains effective across moderate variations in sensor noise characteristics. These additions make the quality-guided selection explicitly principled rather than heuristic. revision: yes
-
Referee: [Section 5 (Experiments)] The simulation validation asserts consistent superiority in coverage, quality, and efficiency, yet the abstract and method description contain no quantitative metrics, baseline algorithms, or statistical analysis. A load-bearing claim of this form requires at least one table or figure reporting concrete numbers (e.g., mean coverage percentage, RMSE, path length) with standard deviations and direct comparison to at least two established NBV methods.
Authors: We agree that concrete quantitative evidence is essential for supporting the performance claims. Although Section 5 already contains simulation results in realistic environments, we have revised the manuscript to include a new summary table (Table 1) that reports mean coverage percentage, final map RMSE, and total path length, each accompanied by standard deviations over repeated trials. The table provides direct numerical comparisons against two standard NBV baselines (a frontier-based planner and an information-gain-driven planner). We have also added a short statistical significance analysis and updated the abstract to reference these quantitative improvements. revision: yes
Circularity Check
No circularity in derivation chain; method is forward and self-contained
full rationale
The paper describes a modular NBV planning framework that selects viewpoints by directly exploiting TSDF-encoded uncertainty to meet user-defined reconstruction quality goals. No equations, parameter fits, or derivations appear in the abstract or context that reduce any claimed prediction or result to a fitted input or self-citation by construction. The approach is presented as an algorithmic contribution with simulation validation, without self-referential loops, uniqueness theorems imported from prior author work, or renaming of known patterns as new derivations. The central claim therefore stands as an independent engineering method rather than a tautological restatement of its inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Z(M)=ξ(M) ∑ w_i / |M| ... d^*=sqrt(1/Z*) ... view generation samples at distances relative to d* interval
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
TSDF representation ... uncertainty encoded in Truncated Signed Distance field
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Exploration and mapping with groups of robots: Recent trends,
A. Quattrini Li, “Exploration and mapping with groups of robots: Recent trends,”Current Robotics Reports, vol. 1, no. 4, 2020. Parameter profile House Coverage Tunnel Coverage House Path length Tunnel Path length House Map Error Tunnel Map Error House Zpost Tunnel Zpost Ours (d ∗ ∈[4;5]) 9507 (86.3%) 54850 (71.5%) 228.6 411.8 3,74% 4,84% 0.83 0.71 Online-...
work page 2020
-
[2]
FUEL: Fast UA V explo- ration using incremental frontier structure and hierarchical planning,
B. Zhou, Y . Zhang, X. Chen, and S. Shen, “FUEL: Fast UA V explo- ration using incremental frontier structure and hierarchical planning,” IEEE Robotics and Autom. Letters, vol. 6, no. 2, pp. 779–786, 2021
work page 2021
-
[3]
A multirobot system for 3-d surface reconstruction with centralized and distributed architectures,
G. Hardouin, J. Moras, F. Morbidi, J. Marzat, and E. M. Mouaddib, “A multirobot system for 3-d surface reconstruction with centralized and distributed architectures,”IEEE Transactions on Robotics, vol. 39, no. 4, pp. 2623–2638, 2023
work page 2023
-
[4]
An efficient sampling-based method for online informative path planning in unknown environments,
L. Schmid, M. Pantic, R. Khanna, L. Ott, R. Siegwart, and J. Nieto, “An efficient sampling-based method for online informative path planning in unknown environments,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 1500–1507, 2020
work page 2020
-
[5]
A frontier-based approach for autonomous exploration,
B. Yamauchi, “A frontier-based approach for autonomous exploration,” inIEEE International Symposium on Computational Intelligence in Robotics and Automation, 1997, pp. 146–151
work page 1997
-
[6]
Receding horizon path planning for 3d exploration and surface inspection,
A. Bircheret al., “Receding horizon path planning for 3d exploration and surface inspection,”Autonomous Robots, 2018
work page 2018
-
[7]
Efficient autonomous exploration planning of large-scale 3-D environments,
M. Selin, M. Tiger, D. Duberg, F. Heintz, and P. Jensfelt, “Efficient autonomous exploration planning of large-scale 3-D environments,” Robotics and Automation Letters, vol. 4, no. 2, pp. 1699–1706, 2019
work page 2019
-
[8]
Combining stochastic optimization and frontiers for aerial multi-robot exploration of 3D terrains,
A. Renzaglia, J. Dibangoye, V . Le Doze, and O. Simonin, “Combining stochastic optimization and frontiers for aerial multi-robot exploration of 3D terrains,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019, pp. 4121–4126
work page 2019
-
[9]
A comparison of volumetric information gain metrics for active 3d object reconstruction,
J. Delmericoet al., “A comparison of volumetric information gain metrics for active 3d object reconstruction,”Autonomous Robots, 2018
work page 2018
-
[10]
S. Pan and H. Wei, “A global max-flow-based multi-resolution next- best-view method for reconstruction of 3d unknown objects,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 714–721, 2022
work page 2022
-
[11]
Adaptive view planning for aerial 3D reconstruc- tion,
C. Peng and V . Isler, “Adaptive view planning for aerial 3D reconstruc- tion,” inIEEE Int. Conf. Rob. & Autom. (ICRA), 2019, pp. 2981–87
work page 2019
-
[12]
B. Tanget al., “Bubble explorer: Fast uav exploration in large- scale and cluttered 3D-environments using occlusion-free spheres,” in IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2023
work page 2023
-
[13]
J. Yu, H. Shen, J. Xu, and T. Zhang, “ECHO: An efficient heuristic viewpoint determination method on frontier-based autonomous explo- ration for quadrotors,”IEEE Robotics and Automation Letters, vol. 8, no. 8, pp. 5047–5054, 2023
work page 2023
-
[14]
Octomap: an efficient probabilistic 3d mapping framework based on octrees,
A. Hornunget al., “Octomap: an efficient probabilistic 3d mapping framework based on octrees,”Autonomous Robots, vol. 34, no. 3, pp. 189–206, 2013
work page 2013
-
[15]
A volumetric method for building complex models from range images,
B. Curless and M. Levoy, “A volumetric method for building complex models from range images,” inProceedings of the 23rd Annual Conference on Computer Graphics and Interactive Techniques, ser. SIGGRAPH ’96, 1996, p. 303–312
work page 1996
-
[16]
CHOMP: Gradient optimization techniques for efficient motion planning,
N. Ratliff, M. Zucker, J. A. Bagnell, and S. Srinivasa, “CHOMP: Gradient optimization techniques for efficient motion planning,” in IEEE Int. Conf. on Robotics and Automation, 2009, pp. 489–494
work page 2009
-
[17]
V oxblox: Incremental 3d euclidean signed distance fields for on-board mav planning,
H. Oleynikova, Z. Taylor, M. Fehr, J. Nieto, and R. Siegwart, “V oxblox: Incremental 3d euclidean signed distance fields for on-board mav planning,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017, pp. 1366–1373
work page 2017
-
[18]
V oxfield: Non-projective signed distance fields for online planning and 3d reconstruction,
Y . Pan, Y . Kompis, L. Bartolomei, R. Mascaro, C. Stachniss, and M. Chli, “V oxfield: Non-projective signed distance fields for online planning and 3d reconstruction,” inIEEE/RSJ International Confer- ence on Intelligent Robots and Systems (IROS), 2022, pp. 5331–5338
work page 2022
-
[19]
Fiesta: Fast incremental euclidean distance fields for online motion planning of aerial robots,
L. Han, F. Gao, B. Zhou, and S. Shen, “Fiesta: Fast incremental euclidean distance fields for online motion planning of aerial robots,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019, pp. 4423–4430
work page 2019
-
[20]
The surface edge explorer (SEE): A measurement-direct approach to next best view planning,
R. Border and J. D. Gammell, “The surface edge explorer (SEE): A measurement-direct approach to next best view planning,”The Int. Journal of Robotics Research, vol. 43, no. 10, pp. 1506–1532, 2022
work page 2022
-
[21]
Kinectfusion: Real-time dense surface mapping and tracking,
R. Newcombeet al., “Kinectfusion: Real-time dense surface mapping and tracking,” in10th IEEE international symposium on mixed and augmented reality, 2011, pp. 127–136
work page 2011
-
[22]
Continuous-time trajectory optimization for online UA V replanning,
H. Oleynikova, M. Burri, Z. Taylor, J. Nieto, R. Siegwart, and E. Galceran, “Continuous-time trajectory optimization for online UA V replanning,” inIEEE/RSJ Int. Conf. Intel. Robots & Syst. (IROS), 2016
work page 2016
-
[23]
Safe local exploration for replanning in cluttered unknown environments for micro-aerial vehicles,
H. Oleynikova, Z. Taylor, R. Siegwart, and J. Nieto, “Safe local exploration for replanning in cluttered unknown environments for micro-aerial vehicles,”IEEE Robotics and Automation Letters, 2018
work page 2018
-
[24]
Ufoexplorer: Fast and scalable sampling- based exploration with a graph-based planning structure,
D. Duberg and P. Jensfelt, “Ufoexplorer: Fast and scalable sampling- based exploration with a graph-based planning structure,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2487–2494, 2022
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.