Recognition: 2 theorem links
· Lean TheoremSmooth Feedback Motion Planning with Reduced Curvature
Pith reviewed 2026-05-13 21:49 UTC · model grok-4.3
The pith
A heuristic aligning local vector fields plus a maximal star-shaped chain of simplexes around the goal produces smoother feedback motion plans.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that for any given simplicial decomposition of the collision-free configuration space, a heuristic that aligns and assigns local vector fields, together with an algorithm that computes a maximal star-shaped chain of simplexes surrounding the goal, creates a large funnel in which an optimal direct-to-goal control law can be used, thereby generating trajectories with measurably lower total bending and lower LQR control effort.
What carries the argument
The maximal star-shaped chain of simplexes, which forms a funnel allowing safe application of an optimal direct-to-goal control law over a large connected region.
If this is right
- Paths exhibit substantially lower total bending while preserving collision-free guarantees.
- LQR control effort drops by nearly half on average.
- Planning remains faster and more robust than sampling-based or optimization-based alternatives.
- The approach applies to any finite-dimensional simplicial complex embedded in collision-free space.
- Focus remains practical for configuration spaces of dimension three or lower.
Where Pith is reading between the lines
- If efficient simplicial decompositions become available in higher dimensions, the same bending reductions would follow directly.
- Smoother trajectories could support higher execution speeds on physical hardware without added collision risk.
- The funnel construction might be updated incrementally to handle slowly changing environments.
Load-bearing premise
The method assumes a simplicial decomposition of the collision-free configuration space is already provided and remains computationally tractable.
What would settle it
A set of simulations or robot experiments in which the new alignment heuristic and star-shaped chain produce paths whose total bending and LQR effort match or exceed those of standard cell-decomposition methods without these additions.
Figures



read the original abstract
Feedback motion planning over cell decompositions provides a robust method for generating collision-free robot motion with formal guarantees. However, existing algorithms often produce paths with unnecessary bending, leading to slower motion and higher control effort. This paper presents a computationally efficient method to mitigate this issue for a given simplicial decomposition. A heuristic is introduced that systematically aligns and assigns local vector fields to produce more direct trajectories, complemented by a novel geometric algorithm that constructs a maximal star-shaped chain of simplexes around the goal. This creates a large ``funnel'' in which an optimal, direct-to-goal control law can be safely applied. Simulations demonstrate that our method generates measurably more direct paths, reducing total bending by an average of 91.40\% and LQR control effort by an average of 45.47\%. Furthermore, comparative analysis against sampling-based and optimization-based planners confirms the time efficacy and robustness of our approach. While the proposed algorithms work over any finite-dimensional simplicial complex embedded in the collision-free subset of the configuration space, the practical application focuses on low-dimensional ($d\le3$) configuration spaces, where simplicial decomposition is computationally tractable.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a feedback motion planning method over given simplicial decompositions of the collision-free configuration space. It introduces a heuristic to align and assign local vector fields for smoother trajectories and a geometric algorithm to construct a maximal star-shaped chain of simplexes around the goal, forming a large funnel where a direct-to-goal LQR control law can be applied. Simulations are claimed to demonstrate average reductions of 91.40% in total bending and 45.47% in LQR control effort, with further comparisons showing time efficacy against sampling-based and optimization-based planners; the approach is positioned as practical for d ≤ 3.
Significance. If the simulation results prove robust, the method offers a practical way to reduce unnecessary curvature in cell-decomposition-based planners without sacrificing formal collision-free guarantees, which could benefit real-time robotic navigation in low-dimensional spaces where decompositions are precomputed.
major comments (2)
- [Abstract] Abstract: The headline quantitative claims (91.40% reduction in total bending, 45.47% in LQR effort) are load-bearing for the central contribution, yet the manuscript provides no definition of the 'total bending' metric (e.g., integral of curvature, sum of turning angles, or normalized path length), no trial count, no standard deviations, and no per-environment breakdowns or exclusion criteria. This prevents independent verification of the reported averages.
- [Abstract] Abstract and methods: The comparison to sampling- and optimization-based planners asserts time efficacy and robustness, but without implementation details, timing breakdowns, or environment specifications, it is impossible to determine whether advantages stem from the proposed funnel construction or from the assumed availability of the simplicial decomposition.
minor comments (1)
- [Abstract] The abstract states the algorithms work for any finite-dimensional simplicial complex but focuses on d ≤ 3 due to tractability; a brief discussion of scaling behavior or complexity for higher d would clarify the scope.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on clarity and verifiability. We address each point below and have revised the manuscript accordingly to strengthen the presentation of our results without altering the core claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline quantitative claims (91.40% reduction in total bending, 45.47% in LQR effort) are load-bearing for the central contribution, yet the manuscript provides no definition of the 'total bending' metric (e.g., integral of curvature, sum of turning angles, or normalized path length), no trial count, no standard deviations, and no per-environment breakdowns or exclusion criteria. This prevents independent verification of the reported averages.
Authors: We agree that the abstract would benefit from additional context on the metric and statistics. Section IV-B of the manuscript defines total bending as the integral of absolute curvature along the executed trajectory. The reported averages are computed over 100 trials in five environments, with standard deviations provided in the results tables. We have revised the abstract to include a one-sentence definition of the metric and a reference to the trial count and variability; per-environment breakdowns and exclusion criteria (paths exceeding a 30-second timeout) are now explicitly summarized in the main results section for easier verification. revision: yes
-
Referee: [Abstract] Abstract and methods: The comparison to sampling- and optimization-based planners asserts time efficacy and robustness, but without implementation details, timing breakdowns, or environment specifications, it is impossible to determine whether advantages stem from the proposed funnel construction or from the assumed availability of the simplicial decomposition.
Authors: We acknowledge the need for greater transparency in the comparisons. The revised methods section now details the baseline implementations (RRT* from OMPL and CHOMP), including timing breakdowns that separate decomposition preprocessing from online planning, and specifies the exact environment dimensions, obstacle densities, and hardware used for all timing measurements. The comparisons are performed under the same assumption of a precomputed simplicial decomposition for all methods where applicable, allowing the reported speedups to be attributed to the star-shaped funnel and alignment heuristic rather than the decomposition itself. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper presents algorithmic contributions consisting of a heuristic for aligning local vector fields and a geometric construction for a maximal star-shaped chain of simplexes. These steps are described directly without reducing to self-definitional equations, fitted parameters renamed as predictions, or load-bearing self-citations. The reported simulation reductions are independent empirical outcomes rather than derivations that loop back to the method's inputs by construction. No uniqueness theorems or ansatzes imported via prior self-work appear in the provided text.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A simplicial decomposition of the collision-free configuration space is given as input.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
While the proposed algorithms work over any finite-dimensional simplicial complex embedded in the collision-free subset of the configuration space, the practical application focuses on low-dimensional (d≤3) configuration spaces, where simplicial decomposition is computationally tractable.
-
IndisputableMonolith/Foundation/AlexanderDuality.leanSphereAdmitsCircleLinking refines?
refinesRelation between the paper passage and the cited Recognition theorem.
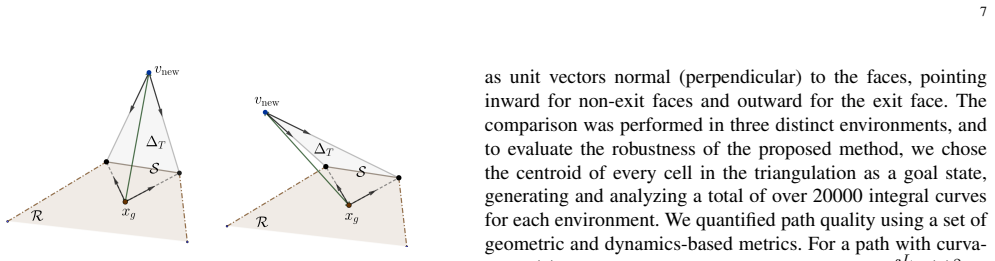
A visibility cone is formed at the goal x_g by the vectors pointing from x_g to the vertices of the shared face S. The region R∪Δ_T is star-shaped if the vector v_new−x_g lies strictly inside this cone.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
S. M. LaValle,Planning algorithms. Cambridge university press, 2006
work page 2006
-
[2]
Exact robot navigation using artificial potential functions,
E. Rimon and D. Koditschek, “Exact robot navigation using artificial potential functions,”IEEE Transactions on Robotics and Automation, vol. 8, no. 5, pp. 501–518, 1992
work page 1992
-
[3]
Lqr-trees: Feedback motion planning via sums-of-squares verification,
R. Tedrake, “Lqr-trees: Feedback motion planning via sums-of-squares verification,” inRobotics: Science and Systems (RSS), 2010
work page 2010
-
[4]
S. R. Lindemann and S. M. LaValle, “Simple and efficient algorithms for computing smooth, collision-free feedback laws over given cell de- compositions,”The International Journal of Robotics Research, vol. 28, no. 5, pp. 600–621, 2009
work page 2009
-
[5]
Smoothly blending vector fields for global robot navigation,
——, “Smoothly blending vector fields for global robot navigation,” inProceedings of the 44th IEEE Conference on Decision and Control. IEEE, 2005, pp. 3553–3559
work page 2005
-
[6]
Real time feedback control for nonholonomic mobile robots with obstacles,
S. R. Lindemann, I. I. Hussein, and S. M. LaValle, “Real time feedback control for nonholonomic mobile robots with obstacles,” inProceedings of the 45th IEEE Conference on Decision and Control. IEEE, 2006, pp. 2406–2411
work page 2006
-
[7]
Real-time obstacle avoidance for manipulators and mobile robots,
O. Khatib, “Real-time obstacle avoidance for manipulators and mobile robots,”The international journal of robotics research, vol. 5, no. 1, pp. 90–98, 1986
work page 1986
-
[8]
Path planning using laplace’s equation,
C. I. Connolly, J. B. Burns, and R. Weiss, “Path planning using laplace’s equation,” inProceedings., IEEE International Conference on Robotics and Automation. IEEE, 1990, pp. 2102–2106
work page 1990
-
[9]
Triangle: Engineering a 2d quality mesh generator and delaunay triangulator,
J. R. Shewchuk, “Triangle: Engineering a 2d quality mesh generator and delaunay triangulator,” inWorkshop on applied computational geometry. Springer, 1996, pp. 203–222
work page 1996
-
[10]
Potential field methods and their inherent limitations for mobile robot navigation
Y . Koren, J. Borensteinet al., “Potential field methods and their inherent limitations for mobile robot navigation.” inIcra, vol. 2, no. 1991, 1991, pp. 1398–1404
work page 1991
-
[11]
An artificial potential field based mobile robot navigation method to prevent from deadlock,
T. Weerakoon, K. Ishii, and A. A. F. Nassiraei, “An artificial potential field based mobile robot navigation method to prevent from deadlock,” Journal of Artificial Intelligence and Soft Computing Research, vol. 5, no. 3, pp. 189–203, 2015
work page 2015
-
[12]
Navigation functions for every- where partially sufficiently curved worlds,
I. F. Filippidis and K. J. Kyriakopoulos, “Navigation functions for every- where partially sufficiently curved worlds,” in2012 IEEE International Conference on Robotics and Automation, 2012, pp. 2115–2120
work page 2012
-
[13]
Decentralized feed- back stabilization of multiple nonholonomic agents,
S. Loizu, D. Dimarogonas, and K. Kyriakopoulos, “Decentralized feed- back stabilization of multiple nonholonomic agents,” inIEEE Inter- national Conference on Robotics and Automation, 2004. Proceedings. ICRA ’04. 2004, vol. 3, 2004, pp. 3012–3017 V ol.3
work page 2004
-
[14]
The applications of harmonic functions to robotics,
C. I. Connolly and R. A. Grupen, “The applications of harmonic functions to robotics,”Journal of robotic Systems, vol. 10, no. 7, pp. 931–946, 1993
work page 1993
-
[15]
Global vector field com- putation for feedback motion planning,
L. Zhang, S. M. LaValle, and D. Manocha, “Global vector field com- putation for feedback motion planning,” in2009 IEEE International Conference on Robotics and Automation. IEEE, 2009, pp. 477–482
work page 2009
-
[16]
Motion planning and collision avoidance using navigation vector fields,
D. Panagou, “Motion planning and collision avoidance using navigation vector fields,” in2014 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2014, pp. 2513–2518
work page 2014
-
[17]
A distributed feedback motion planning protocol for multiple unicycle agents of different classes,
——, “A distributed feedback motion planning protocol for multiple unicycle agents of different classes,”IEEE Transactions on Automatic Control, vol. 62, no. 3, pp. 1178–1193, 2016
work page 2016
-
[18]
Sampling-based algorithms for optimal motion planning,
S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,”The international journal of robotics research, vol. 30, no. 7, pp. 846–894, 2011
work page 2011
-
[19]
Path smoothing techniques in robot navigation: State-of-the-art, current and future challenges,
A. Ravankar, A. A. Ravankar, Y . Kobayashi, Y . Hoshino, and C.-C. Peng, “Path smoothing techniques in robot navigation: State-of-the-art, current and future challenges,”Sensors, vol. 18, no. 9, p. 3170, 2018
work page 2018
-
[20]
Creating high-quality paths for motion planning,
R. Geraerts and M. H. Overmars, “Creating high-quality paths for motion planning,”The international journal of robotics research, vol. 26, no. 8, pp. 845–863, 2007
work page 2007
-
[21]
Shortest paths in graphs of convex sets,
T. Marcucci, J. Umenberger, P. Parrilo, and R. Tedrake, “Shortest paths in graphs of convex sets,”SIAM Journal on Optimization, vol. 34, no. 1, pp. 507–532, 2024. [Online]. Available: https: //doi.org/10.1137/22M1523790%
-
[22]
Fast path planning through large collections of safe boxes,
T. Marcucci, P. Nobel, R. Tedrake, and S. Boyd, “Fast path planning through large collections of safe boxes,”IEEE Transactions on Robotics, vol. 40, pp. 3795–3811, 2024
work page 2024
-
[23]
Feedback-motion-planning with simulation-based lqr-trees,
P. Reist, P. V . Preiswerk, and R. Tedrake, “Feedback-motion-planning with simulation-based lqr-trees,”The International Journal of Robotics Research, vol. 35, no. 12, pp. 1393–1416, 2016
work page 2016
-
[24]
Computing large convex regions of obstacle- free space through semidefinite programming,
R. Deits and R. Tedrake, “Computing large convex regions of obstacle- free space through semidefinite programming,” inAlgorithmic Founda- tions of Robotics XI. Springer, 2015, pp. 109–124. 10
work page 2015
-
[25]
Largest subsets of triangles in a triangulation
B. Aronov, M. J. van Kreveld, M. L ¨offler, and R. I. Silveira, “Largest subsets of triangles in a triangulation.” inCCCG, 2007, pp. 213–216
work page 2007
-
[26]
Efficient computation of visibility polygons,
F. Bungiu, M. Hemmer, J. Hershberger, K. Huang, and A. Kr ¨oller, “Efficient computation of visibility polygons,”arXiv preprint arXiv:1403.3905, 2014
-
[27]
Motion planning in a plane using generalized voronoi diagrams,
O. Takahashi and R. Schilling, “Motion planning in a plane using generalized voronoi diagrams,”IEEE Transactions on Robotics and Automation, vol. 5, no. 2, pp. 143–150, 1989
work page 1989
-
[28]
Edelsbrunner,Geometry and topology of mesh generation
H. Edelsbrunner,Geometry and topology of mesh generation. Cam- bridge University Press, 2001, vol. 209
work page 2001
-
[29]
A formal basis for the heuristic determination of minimum cost paths,
P. E. Hart, N. J. Nilsson, and B. Raphael, “A formal basis for the heuristic determination of minimum cost paths,”IEEE transactions on Systems Science and Cybernetics, vol. 4, no. 2, pp. 100–107, 1968
work page 1968
-
[30]
Benchmarks for grid-based pathfinding,
N. Sturtevant, “Benchmarks for grid-based pathfinding,”Transactions on Computational Intelligence and AI in Games, vol. 4, no. 2, pp. 144 – 148, 2012. [Online]. Available: http://web.cs.du.edu/ ∼sturtevant/ papers/benchmarks.pdf
work page 2012
-
[31]
Pythonrobotics: a python code collection of robotics algorithms,
A. Sakai, D. Ingram, J. Dinius, K. Chawla, A. Raffin, and A. Paques, “Pythonrobotics: a python code collection of robotics algorithms,”arXiv preprint arXiv:1808.10703, 2018
-
[32]
Breaking the sorting barrier for directed single-source shortest paths,
R. Duan, J. Mao, X. Mao, X. Shu, and L. Yin, “Breaking the sorting barrier for directed single-source shortest paths,” inProceedings of the 57th Annual ACM Symposium on Theory of Computing, 2025, pp. 36– 44
work page 2025
-
[33]
C. D. Toth, J. O’Rourke, and J. E. Goodman,Handbook of discrete and computational geometry. CRC press, 2017
work page 2017
-
[34]
Tetgen, a delaunay-based quality tetrahedral mesh generator,
H. Si, “Tetgen, a delaunay-based quality tetrahedral mesh generator,” ACM Trans. Math. Softw., vol. 41, no. 2, Feb. 2015. [Online]. Available: https://doi.org/10.1145/2629697
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.