Recognition: 2 theorem links
· Lean TheoremRascene: High-Fidelity 3D Scene Imaging with mmWave Communication Signals
Pith reviewed 2026-05-13 20:06 UTC · model grok-4.3
The pith
Rascene reconstructs high-precision 3D scenes from standard mmWave communication signals by fusing multiple frames with adaptive projection.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Rascene is an integrated sensing and communication framework that uses ubiquitous mmWave OFDM signals for 3D scene imaging. Individual radio frames are sparse and multipath-ambiguous, so the system applies multi-frame, spatially adaptive fusion with confidence-weighted forward projection to recover geometric consensus across arbitrary poses and produce high-fidelity 3D reconstructions.
What carries the argument
multi-frame spatially adaptive fusion with confidence-weighted forward projection, which aligns signals from different transmitter-receiver poses and combines them to extract consistent 3D geometry.
If this is right
- Enables 3D perception for autonomous driving and robot navigation in smoke, fog, and non-ideal lighting.
- Delivers low-cost 3D imaging by reusing existing mmWave communication hardware instead of dedicated radar.
- Supports scalable deployment without requiring licensed spectrum or bespoke sensing equipment.
- Allows reconstruction from signals collected at arbitrary poses without extra calibration steps.
Where Pith is reading between the lines
- The same fusion approach could be applied to ambient 5G signals for city-scale passive mapping without active transmissions.
- Accuracy might improve further if the method is combined with occasional optical measurements in a hybrid sensor suite.
- Real-time versions would require optimizing the fusion pipeline for lower latency on embedded platforms.
- Performance in highly dynamic scenes with moving objects remains an open extension beyond the static-scene tests.
Load-bearing premise
Multi-frame fusion of sparse, multipath-ambiguous radio frames can reliably recover accurate 3D geometry without specialized hardware or additional calibration.
What would settle it
Controlled experiments in which ground-truth 3D geometry is known show that Rascene point clouds deviate by more than a few centimeters from LiDAR references under realistic multipath conditions.
Figures













read the original abstract
Robust 3D environmental perception is critical for applications such as autonomous driving and robot navigation. However, optical sensors such as cameras and LiDAR often fail under adverse conditions, including smoke, fog, and non-ideal lighting. Although specialized radar systems can operate in these environments, their reliance on bespoke hardware and licensed spectrum limits scalability and cost-effectiveness. This paper introduces Rascene, an integrated sensing and communication (ISAC) framework that leverages ubiquitous mmWave OFDM communication signals for 3D scene imaging. To overcome the sparse and multipath-ambiguous nature of individual radio frames, Rascene performs multi-frame, spatially adaptive fusion with confidence-weighted forward projection, enabling the recovery of geometric consensus across arbitrary poses. Experimental results demonstrate that our method reconstructs 3D scenes with high precision, offering a new pathway toward low-cost, scalable, and robust 3D perception.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Rascene, an ISAC framework that uses ubiquitous mmWave OFDM communication signals for 3D scene imaging. To address the sparse and multipath-ambiguous nature of individual radio frames, it performs multi-frame, spatially adaptive fusion with confidence-weighted forward projection to recover geometric consensus across arbitrary poses, claiming high-precision 3D reconstruction without specialized hardware or calibration.
Significance. If the central claims are substantiated with quantitative evidence, the work would offer a scalable, low-cost pathway for robust 3D perception in adverse conditions by repurposing existing communication infrastructure, potentially impacting autonomous driving and robotics where optical sensors fail.
major comments (3)
- [Abstract] Abstract: the claim that the method 'reconstructs 3D scenes with high precision' is unsupported by any quantitative metrics, error analysis, or validation details, which is load-bearing for the central performance assertion.
- [Method] Method (multi-frame fusion description): no explicit formulation is given for how confidence weights are computed or how forward projection resolves pose variation and multipath ambiguities, leaving the key disambiguation step unsubstantiated.
- [Experimental results] Experimental results: the abstract states 'experimental results demonstrate' high precision, yet the absence of reported error metrics, baselines, or ablation studies on multipath handling prevents assessment of whether the fusion actually recovers accurate geometry without calibration.
minor comments (1)
- [Abstract] Abstract: expand the acronym ISAC on first use for clarity.
Simulated Author's Rebuttal
We sincerely thank the referee for the thorough and constructive review. We address each major comment below and will revise the manuscript to incorporate the requested clarifications and quantitative support.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the method 'reconstructs 3D scenes with high precision' is unsupported by any quantitative metrics, error analysis, or validation details, which is load-bearing for the central performance assertion.
Authors: We agree that the abstract claim requires explicit quantitative backing. In the revised manuscript we will update the abstract to reference concrete metrics (e.g., mean point-to-point RMSE and standard deviation relative to ground-truth LiDAR) that appear in the experimental section, and we will add a short validation summary to make the performance assertion self-contained. revision: yes
-
Referee: [Method] Method (multi-frame fusion description): no explicit formulation is given for how confidence weights are computed or how forward projection resolves pose variation and multipath ambiguities, leaving the key disambiguation step unsubstantiated.
Authors: We acknowledge the need for explicit mathematics. We will insert the missing equations: confidence weights will be defined as a product of per-voxel SNR and cross-frame geometric consistency; forward projection will be formulated as a pose-transformed accumulation followed by a consensus filter that discards inconsistent multipath returns. These additions will directly substantiate the disambiguation mechanism. revision: yes
-
Referee: [Experimental results] Experimental results: the abstract states 'experimental results demonstrate' high precision, yet the absence of reported error metrics, baselines, or ablation studies on multipath handling prevents assessment of whether the fusion actually recovers accurate geometry without calibration.
Authors: We will expand the experimental section to include quantitative error metrics (RMSE, precision-recall curves), comparisons against single-frame and conventional radar baselines, and dedicated ablation studies isolating the multipath-handling and multi-frame fusion components. These additions will allow direct assessment of geometric accuracy without external calibration. revision: yes
Circularity Check
No circularity detected in derivation chain
full rationale
The abstract presents Rascene as a novel ISAC framework that applies multi-frame spatially adaptive fusion with confidence-weighted forward projection to mmWave OFDM signals. No equations, parameter fits, or self-citations are shown that would make any claimed prediction or geometric consensus equivalent to the inputs by construction. The method description remains independent of its outputs, with no self-definitional loops, fitted inputs renamed as predictions, or load-bearing self-citations. The derivation is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Zr(xr) = sum wr←i(xi,xr) Fi(xi) / (sum wr←i + ε) with wr←i = K_σ(˜xr←i,xr) · [α(Ci(xi))]^η
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
multi-frame, spatially adaptive fusion with confidence-weighted forward projection
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Enabling{high-quality}untethered virtual reality
Omid Abari, Dinesh Bharadia, Austin Duffield, and Dina Katabi. Enabling{high-quality}untethered virtual reality. In14th USENIX Symposium on Networked Systems Design and Implementation (NSDI 17), pages 531–544, 2017. 1, 2
work page 2017
-
[2]
3d tracking via body radio reflections
Fadel Adib, Zach Kabelac, Dina Katabi, and Robert C Miller. 3d tracking via body radio reflections. In11th USENIX Sym- posium on Networked Systems Design and Implementation (NSDI 14), pages 317–329, 2014
work page 2014
-
[3]
Capturing the human figure through a wall
Fadel Adib, Chen-Yu Hsu, Hongzi Mao, Dina Katabi, and Fr´edo Durand. Capturing the human figure through a wall. ACM Transactions on Graphics (TOG), 34(6):1–13, 2015. 1
work page 2015
-
[4]
Fadel Adib, Zachary Kabelac, and Dina Katabi.{Multi- Person}localization via{RF}body reflections. In12th USENIX Symposium on Networked Systems Design and Im- plementation (NSDI 15), pages 279–292, 2015. 2
work page 2015
-
[5]
Carlos Campos, Richard Elvira, Juan J G ´omez Rodr´ıguez, Jos´e MM Montiel, and Juan D Tard ´os. Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam.IEEE transactions on robotics, 37(6):1874– 1890, 2021. 2
work page 2021
-
[6]
Suma++: Efficient lidar-based semantic slam
Xieyuanli Chen, Andres Milioto, Emanuele Palazzolo, Philippe Giguere, Jens Behley, and Cyrill Stachniss. Suma++: Efficient lidar-based semantic slam. In2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 4530–4537. IEEE, 2019. 1, 2
work page 2019
- [7]
-
[8]
Learning implicit fields for generative shape modeling
Zhiqin Chen and Hao Zhang. Learning implicit fields for generative shape modeling. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 5939–5948, 2019. 2
work page 2019
-
[9]
Xiang Cheng, Dongliang Duan, Shijian Gao, and Liuqing Yang. Integrated sensing and communications (isac) for ve- hicular communication networks (vcn).IEEE Internet of Things Journal, 9(23):23441–23451, 2022. 2
work page 2022
-
[10]
Yuwei Cheng, Jingran Su, Mengxin Jiang, and Yimin Liu. A novel radar point cloud generation method for robot envi- ronment perception.IEEE Transactions on Robotics, 38(6): 3754–3773, 2022. 1, 2
work page 2022
-
[11]
Implicit functions in feature space for 3d shape reconstruc- tion and completion
Julian Chibane, Thiemo Alldieck, and Gerard Pons-Moll. Implicit functions in feature space for 3d shape reconstruc- tion and completion. InProceedings of the IEEE/CVF con- ference on computer vision and pattern recognition, pages 6970–6981, 2020. 2
work page 2020
-
[12]
Julian Chibane, Gerard Pons-Moll, et al. Neural unsigned distance fields for implicit function learning.Advances in Neural Information Processing Systems, 33:21638–21652,
-
[13]
Isac overview.Hyperfine Interactions, 225(1):1–8, 2014
J Dilling, R Kr ¨ucken, and G Ball. Isac overview.Hyperfine Interactions, 225(1):1–8, 2014. 2
work page 2014
-
[14]
Fuwang Dong, Fan Liu, Yuanhao Cui, Wei Wang, Kaifeng Han, and Zhiqin Wang. Sensing as a service in 6g percep- tive networks: A unified framework for isac resource allo- cation.IEEE Transactions on Wireless Communications, 22 (5):3522–3536, 2022. 2
work page 2022
-
[15]
Efficient continuous- time slam for 3d lidar-based online mapping
David Droeschel and Sven Behnke. Efficient continuous- time slam for 3d lidar-based online mapping. In2018 IEEE International Conference on Robotics and Automation (ICRA), pages 5000–5007. IEEE, 2018. 2
work page 2018
-
[16]
Lsd- slam: Large-scale direct monocular slam
Jakob Engel, Thomas Sch ¨ops, and Daniel Cremers. Lsd- slam: Large-scale direct monocular slam. InEuropean con- ference on computer vision, pages 834–849. Springer, 2014. 2
work page 2014
-
[17]
Jakob Engel, Vladlen Koltun, and Daniel Cremers. Direct sparse odometry.IEEE transactions on pattern analysis and machine intelligence, 40(3):611–625, 2017. 1, 2
work page 2017
-
[18]
Learning shape templates with structured implicit functions
Kyle Genova, Forrester Cole, Daniel Vlasic, Aaron Sarna, William T Freeman, and Thomas Funkhouser. Learning shape templates with structured implicit functions. InPro- ceedings of the IEEE/CVF international conference on com- puter vision, pages 7154–7164, 2019. 2
work page 2019
-
[19]
Through fog high-resolution imag- ing using millimeter wave radar
Junfeng Guan, Sohrab Madani, Suraj Jog, Saurabh Gupta, and Haitham Hassanieh. Through fog high-resolution imag- ing using millimeter wave radar. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 11464–11473, 2020. 1
work page 2020
-
[20]
Zhenyao He, Wei Xu, Hong Shen, Derrick Wing Kwan Ng, Yonina C. Eldar, and Xiaohu You. Full-duplex communi- cation for isac: Joint beamforming and power optimization. IEEE Journal on Selected Areas in Communications, 41(9): 2920–2936, 2023. 2
work page 2023
-
[21]
Real-time loop closure in 2d lidar slam
Wolfgang Hess, Damon Kohler, Holger Rapp, and Daniel Andor. Real-time loop closure in 2d lidar slam. In2016 IEEE international conference on robotics and automation (ICRA), pages 1271–1278. IEEE, 2016. 1, 2
work page 2016
-
[22]
Point-to-voxel knowledge distillation for lidar se- mantic segmentation
Yuenan Hou, Xinge Zhu, Yuexin Ma, Chen Change Loy, and Yikang Li. Point-to-voxel knowledge distillation for lidar se- mantic segmentation. InProceedings of the IEEE/CVF con- ference on computer vision and pattern recognition, pages 8479–8488, 2022. 2
work page 2022
-
[23]
Towards foundational models for single-chip radar
Tianshu Huang, Akarsh Prabhakara, Chuhan Chen, Jay Karhade, Deva Ramanan, Matthew O’toole, and Anthony Rowe. Towards foundational models for single-chip radar. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 24655–24665, 2025. 1
work page 2025
-
[24]
3d gaussian splatting for real-time radiance field rendering.ACM Trans
Bernhard Kerbl, Georgios Kopanas, Thomas Leimk ¨uhler, and George Drettakis. 3d gaussian splatting for real-time radiance field rendering.ACM Trans. Graph., 42(4):139–1,
-
[25]
Musa Furkan Keskin, Mohammad Mahdi Mojahedian, Je- sus O Lacruz, Carina Marcus, Olof Eriksson, Andrea Gior- getti, Joerg Widmer, and Henk Wymeersch. Fundamental trade-offs in monostatic isac: A holistic investigation to- wards 6g.IEEE Transactions on Wireless Communications,
-
[26]
Spotfi: Decimeter level localization using wifi
Manikanta Kotaru, Kiran Joshi, Dinesh Bharadia, and Sachin Katti. Spotfi: Decimeter level localization using wifi. In Proceedings of the 2015 ACM conference on special interest group on data communication, pages 269–282, 2015. 2 9
work page 2015
-
[27]
Enabling visual recognition at radio frequency
Haowen Lai, Gaoxiang Luo, Yifei Liu, and Mingmin Zhao. Enabling visual recognition at radio frequency. InProceed- ings of the 30th Annual International Conference on Mobile Computing and Networking, pages 388–403, 2024. 1, 2, 7
work page 2024
-
[28]
Rf-based 3d slam rivaling vision approaches
Haowen Lai, Zhiwei Zheng, and Mingmin Zhao. Rf-based 3d slam rivaling vision approaches. InProceedings of the 31th Annual International Conference on Mobile Computing and Networking (MobiCom), pages 170–185, 2025. 7
work page 2025
-
[29]
Tay- lor, Mathias Unberath, Ming-Yu Liu, and Chen-Hsuan Lin
Zhaoshuo Li, Thomas M ¨uller, Alex Evans, Russell H. Tay- lor, Mathias Unberath, Ming-Yu Liu, and Chen-Hsuan Lin. Neuralangelo: High-fidelity neural surface reconstruction. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 8456–8465,
-
[30]
Megasam: Accurate, fast and robust structure and motion from casual dynamic videos
Zhengqi Li, Richard Tucker, Forrester Cole, Qianqian Wang, Linyi Jin, Vickie Ye, Angjoo Kanazawa, Aleksander Holyn- ski, and Noah Snavely. Megasam: Accurate, fast and robust structure and motion from casual dynamic videos. InPro- ceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 10486–10496, 2025. 1
work page 2025
-
[31]
Francesca Meneghello, Cheng Chen, Carlos Cordeiro, and Francesco Restuccia. Toward integrated sensing and com- munications in ieee 802.11 bf wi-fi networks.IEEE Commu- nications Magazine, 61(7):128–133, 2023. 2
work page 2023
-
[32]
Occupancy networks: Learning 3d reconstruction in function space
Lars Mescheder, Michael Oechsle, Michael Niemeyer, Se- bastian Nowozin, and Andreas Geiger. Occupancy networks: Learning 3d reconstruction in function space. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 4460–4470, 2019. 2
work page 2019
-
[33]
Ben Mildenhall, Pratul P Srinivasan, Matthew Tancik, Jonathan T Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as neural radiance fields for view syn- thesis.Communications of the ACM, 65(1):99–106, 2021. 1, 2
work page 2021
-
[34]
Dtam: Dense tracking and mapping in real-time
Richard A Newcombe, Steven J Lovegrove, and Andrew J Davison. Dtam: Dense tracking and mapping in real-time. In2011 international conference on computer vision, pages 2320–2327. IEEE, 2011. 2
work page 2011
-
[35]
Mulls: Versatile lidar slam via multi-metric lin- ear least square
Yue Pan, Pengchuan Xiao, Yujie He, Zhenlei Shao, and Zesong Li. Mulls: Versatile lidar slam via multi-metric lin- ear least square. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 11633–11640. IEEE, 2021. 2
work page 2021
-
[36]
Deepsdf: Learning con- tinuous signed distance functions for shape representation
Jeong Joon Park, Peter Florence, Julian Straub, Richard Newcombe, and Steven Lovegrove. Deepsdf: Learning con- tinuous signed distance functions for shape representation. InProceedings of the IEEE/CVF conference on computer vi- sion and pattern recognition, pages 165–174, 2019. 2
work page 2019
-
[37]
High resolution point clouds from mmwave radar
Akarsh Prabhakara, Tao Jin, Arnav Das, Gantavya Bhatt, Lilly Kumari, Elahe Soltanaghai, Jeff Bilmes, Swarun Ku- mar, and Anthony Rowe. High resolution point clouds from mmwave radar. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 4135–4142, 2023. 1, 2
work page 2023
-
[38]
Christoph B Rist, David Emmerichs, Markus Enzweiler, and Dariu M Gavrila. Semantic scene completion using local deep implicit functions on lidar data.IEEE transactions on pattern analysis and machine intelligence, 44(10):7205– 7218, 2021. 2
work page 2021
-
[39]
Elahe Soltanaghaei, Avinash Kalyanaraman, and Kamin Whitehouse. Multipath triangulation: Decimeter-level wifi localization and orientation with a single unaided receiver. In Proceedings of the 16th annual international conference on mobile systems, applications, and services, pages 376–388,
-
[40]
Siwis: Fine-grained human detection using single wifi device
Kunzhe Song, Qijun Wang, Shichen Zhang, and Huacheng Zeng. Siwis: Fine-grained human detection using single wifi device. InProceedings of the 30th Annual International Con- ference on Mobile Computing and Networking, pages 1439– 1454, 2024. 2
work page 2024
-
[41]
Kunzhe Song, Maxime Zingraff, and Huacheng Zeng. Spectrum shortage for radio sensing? leveraging ambient 5g signals for human activity detection.arXiv preprint arXiv:2603.03579, 2026. 2
-
[42]
mmtrack: Passive multi-person localization using commod- ity millimeter wave radio
Chenshu Wu, Feng Zhang, Beibei Wang, and KJ Ray Liu. mmtrack: Passive multi-person localization using commod- ity millimeter wave radio. InIEEE INFOCOM 2020-IEEE Conference on Computer Communications, pages 2400–
work page 2020
-
[43]
4d gaussian splatting for real-time dynamic scene render- ing
Guanjun Wu, Taoran Yi, Jiemin Fang, Lingxi Xie, Xiaopeng Zhang, Wei Wei, Wenyu Liu, Qi Tian, and Xinggang Wang. 4d gaussian splatting for real-time dynamic scene render- ing. InProceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition (CVPR), pages 20310– 20320, 2024. 2
work page 2024
-
[44]
Kai Wu, Jacopo Pegoraro, Francesca Meneghello, J Andrew Zhang, Jesus O Lacruz, Joerg Widmer, Francesco Restuc- cia, Michele Rossi, Xiaojing Huang, Daqing Zhang, et al. Sensing in bistatic isac systems with clock asynchronism: A signal processing perspective.IEEE Signal Processing Mag- azine, 41(5):31–43, 2024. 2
work page 2024
-
[45]
Zhaoyang Xia, You-Chen Liu, Xin Li, Xinge Zhu, Yuexin Ma, Yikang Li, Yuenan Hou, and Y . Qiao. Scpnet: Semantic scene completion on point cloud.2023 IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition (CVPR), pages 17642–17651, 2023. 2
work page 2023
-
[46]
Person-in-wifi 3d: End-to-end multi- person 3d pose estimation with wi-fi
Kangwei Yan, Fei Wang, Bo Qian, Han Ding, Jinsong Han, and Xing Wei. Person-in-wifi 3d: End-to-end multi- person 3d pose estimation with wi-fi. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 969–978, 2024. 2
work page 2024
-
[47]
Ruibin Zhang, Donglai Xue, Yuhan Wang, Ruixu Geng, and Fei Gao. Towards dense and accurate radar perception via efficient cross-modal diffusion model.IEEE Robotics and Automation Letters, 2024. 1, 2
work page 2024
-
[48]
Emotion recognition using wireless signals
Mingmin Zhao, Fadel Adib, and Dina Katabi. Emotion recognition using wireless signals. InProceedings of the 22nd annual international conference on mobile computing and networking, pages 95–108, 2016. 2
work page 2016
-
[49]
Xinge Zhu, Hui Zhou, Tai Wang, Fangzhou Hong, Yuexin Ma, Wei Li, Hongsheng Li, and Dahua Lin. Cylindrical and asymmetrical 3d convolution networks for lidar segmenta- tion.2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 9934–9943, 2020. 2 10 Rascene: High-Fidelity 3D Scene Imaging with mmWave Communication Signals Supplem...
work page 2021
-
[50]
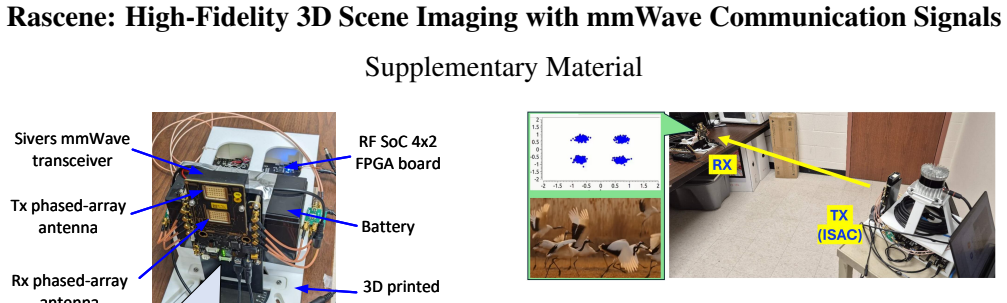
Monostatic ISAC Hardware We built a monostatic ISAC prototype using commercial off-the-shelf (COTS) components, enabling joint commu- nication and sensing within a compact device. Fig. 13 shows our monostatic ISAC prototype, with its parameters summarized in Tab. 7. The system consists of two primary COTS modules: (i) an AMD/Xilinx RFSoC 4x2 FPGA board, a...
-
[51]
Data Collection Platform.To collect paired RF-LiDAR data, we mounted our custom-designed ISAC device, an Ouster OS0-128 Li- DAR, and a TDK ICM-20948 IMU on a movable cart. The final dataset contains synchronized RF-LiDAR frame pairs collected from 20 indoor environments spanning di- verse layouts, clutter levels, and construction materials such as drywall...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.