Inverse Safety Filtering: Inferring Constraints from Safety Filters for Decentralized Coordination
Pith reviewed 2026-05-13 20:04 UTC · model grok-4.3
The pith
Agents can infer hidden safety constraints by observing the filtered actions of other agents.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Inverse safety filtering recovers the constraints implicit in another agent's safety-filtered actions; under sufficient conditions the inference converges, and when paired with a decentralized planner the overall system remains forward safe provided the constraint activation distance is sufficiently large.
What carries the argument
Inverse safety filtering, which exploits the known structure of a safety filter to work backwards from the observed filtered control to the underlying constraint set.
If this is right
- Constraints can be recovered online without direct communication.
- Inference converges under the given sufficient conditions.
- Decentralized planning maintains safety once the activation distance exceeds a threshold.
- The method applies to both simulated and physical multi-agent platforms such as quadruped robots.
Where Pith is reading between the lines
- The approach could scale to larger teams where bandwidth for explicit constraint sharing is limited.
- It opens the possibility of treating learned or black-box safety filters as sources of implicit constraints for downstream planners.
- Hardware validation on quadrupeds suggests the inference loop runs fast enough for real-time use.
Load-bearing premise
The sufficient conditions that allow constraint inference to succeed hold, and the activation distance is large enough for the decentralized planner to keep the system safe.
What would settle it
A counter-example in which the inference procedure fails to converge or recover the true constraint when the paper's stated sufficient conditions are satisfied, or a closed-loop trajectory in which safety is violated despite a large activation distance.
Figures





read the original abstract
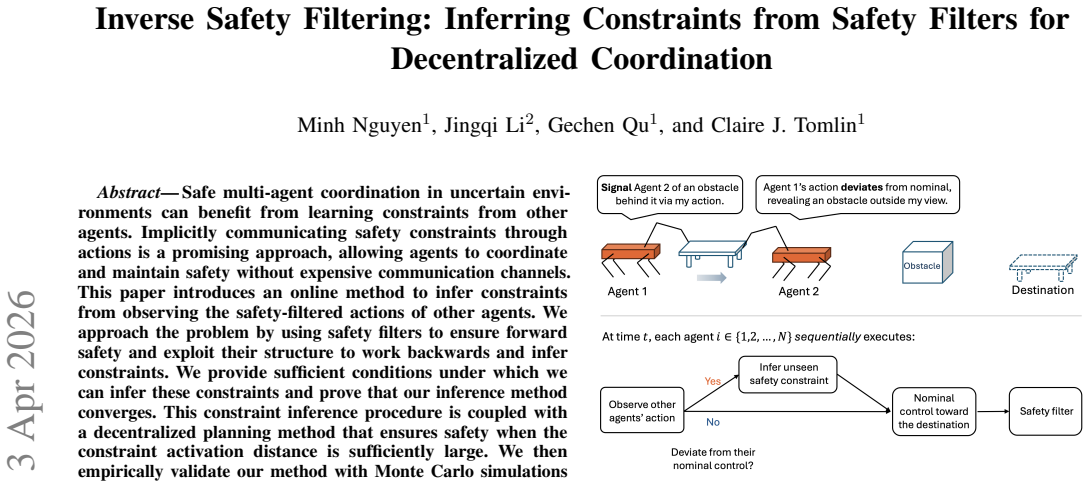
Safe multi-agent coordination in uncertain environments can benefit from learning constraints from other agents. Implicitly communicating safety constraints through actions is a promising approach, allowing agents to coordinate and maintain safety without expensive communication channels. This paper introduces an online method to infer constraints from observing the safety-filtered actions of other agents. We approach the problem by using safety filters to ensure forward safety and exploit their structure to work backwards and infer constraints. We provide sufficient conditions under which we can infer these constraints and prove that our inference method converges. This constraint inference procedure is coupled with a decentralized planning method that ensures safety when the constraint activation distance is sufficiently large. We then empirically validate our method with Monte Carlo simulations and hardware experiments with quadruped robots.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces an online method to infer safety constraints from observing safety-filtered actions of other agents in multi-agent coordination. It exploits the structure of safety filters to work backwards from filtered actions, provides sufficient conditions under which constraints can be inferred with a proof of convergence for the inference method, couples this with a decentralized planner that guarantees safety when the constraint activation distance is sufficiently large, and validates the approach via Monte Carlo simulations and hardware experiments on quadruped robots.
Significance. If the sufficient conditions hold and the activation-distance threshold is practically satisfiable, the work offers a communication-free mechanism for implicit constraint sharing that preserves forward invariance in decentralized settings. The combination of a provably convergent inference procedure with an empirical demonstration on physical robots is a clear strength; the approach could extend safety-filter techniques to multi-agent scenarios where explicit communication is costly or unavailable.
major comments (2)
- [Abstract] Abstract: the decentralized planner's safety guarantee is stated to hold only when the constraint activation distance is 'sufficiently large,' yet no explicit bound, estimation procedure, or sensitivity analysis for this threshold is supplied. This quantity is load-bearing for the forward-invariance claim and for interpreting the Monte Carlo and quadruped results.
- [Abstract] Abstract: sufficient conditions for constraint inference and the associated convergence proof are asserted, but the manuscript provides no visible derivation or statement of those conditions, preventing verification that the inference step is sound and that the empirical trials satisfy them.
minor comments (1)
- [Abstract] The abstract mentions empirical validation but supplies no quantitative metrics, error bars, or comparison baselines, which would aid assessment of practical performance.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on arXiv:2604.02687. We address each major point below and have revised the manuscript to strengthen the presentation of the activation-distance bound and the inference conditions.
read point-by-point responses
-
Referee: [Abstract] Abstract: the decentralized planner's safety guarantee is stated to hold only when the constraint activation distance is 'sufficiently large,' yet no explicit bound, estimation procedure, or sensitivity analysis for this threshold is supplied. This quantity is load-bearing for the forward-invariance claim and for interpreting the Monte Carlo and quadruped results.
Authors: We agree that an explicit bound strengthens the claim. The revised manuscript derives a sufficient lower bound on the activation distance (new Theorem 3) in terms of the Lipschitz constants of the dynamics, the safety-filter margin, and the maximum disturbance. A corresponding estimation procedure and sensitivity analysis have been added to Section V-B, with additional Monte Carlo results showing graceful degradation near the bound. revision: yes
-
Referee: [Abstract] Abstract: sufficient conditions for constraint inference and the associated convergence proof are asserted, but the manuscript provides no visible derivation or statement of those conditions, preventing verification that the inference step is sound and that the empirical trials satisfy them.
Authors: The conditions appear in Assumption 1 and Theorem 2, with the full convergence proof in Appendix B. To improve visibility we have (i) expanded the abstract to list the key requirements (bounded disturbances and persistent excitation), (ii) added a concise derivation summary in Section III-C, and (iii) included a verification table (new Table II) confirming that all reported simulations and hardware trials satisfy the conditions. revision: yes
Circularity Check
No circularity detected; derivation is self-contained
full rationale
The paper states sufficient conditions for inferring constraints from safety-filtered actions and proves convergence of the inference procedure using the structure of safety filters. The decentralized planner is explicitly conditioned on the activation distance being sufficiently large, presented as an assumption rather than a derived claim. No load-bearing step reduces by construction to a fitted input, self-definition, or self-citation chain; the arguments rely on standard forward-invariance properties independent of the target results. Empirical validation with Monte Carlo and hardware experiments is separate from the theoretical claims.
Axiom & Free-Parameter Ledger
free parameters (1)
- constraint activation distance threshold
axioms (1)
- domain assumption Safety filters ensure forward safety of the system
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We provide sufficient conditions under which we can infer these constraints and prove that our inference method converges... when the constraint activation distance is sufficiently large.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
h(s, θ) = (s−θ)⊤Q(s−θ)−r² ... usafe = arg min ½∥u−unom∥² s.t. h(st+1,θ) ≥ (1−γ)h(st,θ)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Collaborative Navigation and Manipulation of a Cable-Towed Load by Multiple Quadrupedal Robots,
C. Yang, G. N. Sue, Z. Li, L. Yang, H. Shen, Y . Chi, A. Rai, J. Zeng, and K. Sreenath, “Collaborative Navigation and Manipulation of a Cable-Towed Load by Multiple Quadrupedal Robots,”IEEE Robotics and Automation Letters, vol. 7, pp. 10041–10048, Oct. 2022
work page 2022
-
[2]
Coverage control for mobile sensing networks,
J. Cortes, S. Martinez, T. Karatas, and F. Bullo, “Coverage control for mobile sensing networks,”IEEE Transactions on Robotics and Automation, vol. 20, pp. 243–255, Apr. 2004
work page 2004
-
[3]
Coordination and decentralized cooperation of multiple mobile manipulators,
O. Khatib, K. Yokoi, K. Chang, D. Ruspini, R. Holmberg, and A. Casal, “Coordination and decentralized cooperation of multiple mobile manipulators,”Journal of Robotic Systems, vol. 13, no. 11, pp. 755–764, 1996
work page 1996
-
[4]
Control barrier function based quadratic programs with application to adaptive cruise control,
A. D. Ames, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs with application to adaptive cruise control,” in53rd IEEE Conference on Decision and Control, pp. 6271–6278, Dec. 2014. ISSN: 0191-2216
work page 2014
-
[5]
Control Barrier Certificates for Safe Swarm Behavior,
U. Borrmann, L. Wang, A. D. Ames, and M. Egerstedt, “Control Barrier Certificates for Safe Swarm Behavior,”IFAC-PapersOnLine, vol. 48, pp. 68–73, Jan. 2015
work page 2015
-
[6]
J. Wang and X. Hu, “Distributed Consensus in Multi-vehicle Coopera- tive Control: Theory and Applications (Ren, W. and Beard, R.W.; 2008) [Book Shelf],”IEEE Control Systems Magazine, vol. 30, pp. 85–86, June 2010
work page 2008
-
[7]
Constraint Inference in Control Tasks from Expert Demonstrations via Inverse Optimization,
D. Papadimitriou and J. Li, “Constraint Inference in Control Tasks from Expert Demonstrations via Inverse Optimization,” in2023 62nd IEEE Conference on Decision and Control (CDC), pp. 1762–1769, Dec. 2023. ISSN: 2576-2370
work page 2023
-
[8]
Algorithms for inverse reinforcement learning.,
A. Y . Ng, S. Russell,et al., “Algorithms for inverse reinforcement learning.,” inIcml, vol. 1, p. 2, 2000
work page 2000
-
[9]
Inverse Constrained Reinforcement Learning,
S. Malik, U. Anwar, A. Aghasi, and A. Ahmed, “Inverse Constrained Reinforcement Learning,” inProceedings of the 38th International Conference on Machine Learning, pp. 7390–7399, PMLR, July 2021. ISSN: 2640-3498
work page 2021
-
[10]
T. L. Molloy, J. J. Ford, and T. Perez, “Online inverse optimal control for control-constrained discrete-time systems on finite and infinite horizons,”Automatica, vol. 120, p. 109109, Oct. 2020
work page 2020
-
[11]
Model-based inverse reinforcement learning for deterministic systems,
R. Self, M. Abudia, S. M. N. Mahmud, and R. Kamalapurkar, “Model-based inverse reinforcement learning for deterministic systems,” Automatica, vol. 140, p. 110242, June 2022
work page 2022
-
[12]
J. Li, C.-Y . Chiu, L. Peters, S. Sojoudi, C. Tomlin, and D. Fridovich- Keil, “Cost inference for feedback dynamic games from noisy par- tial state observations and incomplete trajectories,”arXiv preprint arXiv:2301.01398, 2023
-
[13]
S. Y . Soltanian and W. Zhang, “Peer-Aware Cost Estimation in Nonlinear General-Sum Dynamic Games for Mutual Learning and Intent Inference,” Apr. 2025. arXiv:2504.17129 [eess]
-
[14]
Learning Hyper- planes for Multi-Agent Collision Avoidance in Space,
F. Palafox, Y . Yu, and D. Fridovich-Keil, “Learning Hyper- planes for Multi-Agent Collision Avoidance in Space,” Nov. 2023. arXiv:2311.09439 [cs]
-
[15]
Learning constraints from demon- strations with grid and parametric representations,
G. Chou, D. Berenson, and N. Ozay, “Learning constraints from demon- strations with grid and parametric representations,”The International Journal of Robotics Research, vol. 40, no. 10-11, pp. 1255–1283, 2021
work page 2021
-
[16]
Maximum Likelihood Constraint Inference for Inverse Reinforcement Learning,
D. R. R. Scobee and S. S. Sastry, “Maximum Likelihood Constraint Inference for Inverse Reinforcement Learning,” inInternational Con- ference on Learning Representations, Sept. 2019
work page 2019
-
[17]
Uncertainty-aware constraint inference in inverse constrained reinforcement learning,
S. Xu and G. Liu, “Uncertainty-aware constraint inference in inverse constrained reinforcement learning,” inThe Twelfth International Conference on Learning Representations, 2024
work page 2024
-
[18]
Safety Verification of Hybrid Systems Using Barrier Certificates,
S. Prajna and A. Jadbabaie, “Safety Verification of Hybrid Systems Using Barrier Certificates,” inHybrid Systems: Computation and Control(R. Alur and G. J. Pappas, eds.), (Berlin, Heidelberg), pp. 477– 492, Springer, 2004
work page 2004
-
[19]
Hamilton-Jacobi reachability: A brief overview and recent advances,
S. Bansal, M. Chen, S. Herbert, and C. J. Tomlin, “Hamilton-Jacobi reachability: A brief overview and recent advances,” in2017 IEEE 56th Annual Conference on Decision and Control (CDC), pp. 2242–2253, Dec. 2017
work page 2017
-
[20]
Control Barrier Functions: Theory and Applications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control Barrier Functions: Theory and Applications,” in 2019 18th European Control Conference (ECC), pp. 3420–3431, June 2019
work page 2019
-
[21]
The Safety Filter: A Unified View of Safety-Critical Control in Autonomous Systems,
K.-C. Hsu, H. Hu, and J. F. Fisac, “The Safety Filter: A Unified View of Safety-Critical Control in Autonomous Systems,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 7, pp. 47–72, July
-
[22]
Publisher: Annual Reviews
-
[23]
K. P. Wabersich, A. J. Taylor, J. J. Choi, K. Sreenath, C. J. Tomlin, A. D. Ames, and M. N. Zeilinger, “Data-Driven Safety Filters: Hamilton- Jacobi Reachability, Control Barrier Functions, and Predictive Methods for Uncertain Systems,”IEEE Control Systems Magazine, vol. 43, pp. 137–177, Oct. 2023
work page 2023
-
[24]
Safety-Critical Model Predictive Control with Discrete-Time Control Barrier Function,
J. Zeng, B. Zhang, and K. Sreenath, “Safety-Critical Model Predictive Control with Discrete-Time Control Barrier Function,” in2021 Amer- ican Control Conference (ACC), pp. 3882–3889, May 2021. ISSN: 2378-5861
work page 2021
-
[25]
J. Kim, R. T. Fawcett, V . R. Kamidi, A. D. Ames, and K. A. Hamed, “Layered Control for Cooperative Locomotion of Two Quadrupedal Robots: Centralized and Distributed Approaches,”IEEE Transactions on Robotics, vol. 39, pp. 4728–4748, Dec. 2023
work page 2023
-
[26]
A. Pallar, G. Li, M. Sarvaiya, and G. Loianno, “Optimal Trajectory Planning for Cooperative Manipulation with Multiple Quadrotors Using Control Barrier Functions,” in2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 2808–2814, May 2025
work page 2025
-
[27]
Multi-UA V Collaborative Transportation of Payloads With Obstacle Avoidance,
A. Hegde and D. Ghose, “Multi-UA V Collaborative Transportation of Payloads With Obstacle Avoidance,”IEEE Control Systems Letters, vol. 6, pp. 926–931, 2022
work page 2022
-
[28]
Distributed multi-robot formation control in dynamic environments,
J. Alonso-Mora, E. Montijano, T. N ¨ageli, O. Hilliges, M. Schwager, and D. Rus, “Distributed multi-robot formation control in dynamic environments,”Autonomous Robots, vol. 43, pp. 1079–1100, June 2019
work page 2019
-
[29]
Safety barrier certificates for heterogeneous multi-robot systems,
L. Wang, A. Ames, and M. Egerstedt, “Safety barrier certificates for heterogeneous multi-robot systems,” in2016 American Control Conference (ACC), pp. 5213–5218, July 2016. ISSN: 2378-5861
work page 2016
-
[30]
Legibility and predictability of robot motion,
A. D. Dragan, K. C. Lee, and S. S. Srinivasa, “Legibility and predictability of robot motion,” in2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), pp. 301–308, Mar
-
[31]
M. Bujarbaruah, Y . R. St¨urz, C. Holda, K. H. Johansson, and F. Borrelli, “Learning Environment Constraints in Collaborative Robotics: A Decen- tralized Leader-Follower Approach,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1636–1641, Sept. 2021. ISSN: 2153-0866
work page 2021
-
[32]
S. P. Boyd and L. Vandenberghe,Convex optimization. Cambridge New York Melbourne New Delhi Singapore: Cambridge University Press, version 29 ed., 2023
work page 2023
-
[33]
D. Fridovich-Keil, E. Ratner, L. Peters, A. D. Dragan, and C. J. Tomlin, “Efficient iterative linear-quadratic approximations for nonlinear multi- player general-sum differential games,” in2020 IEEE International Conference on Robotics and Automation (ICRA), pp. 1475–1481, IEEE, 2020
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.