SDVDiag: Using Context-Aware Causality Mining for the Diagnosis of Connected Vehicle Functions
Pith reviewed 2026-05-13 18:28 UTC · model grok-4.3
The pith
Integrating human feedback and domain knowledge into causality mining raises diagnostic precision for connected vehicle systems from 14% to 100%.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
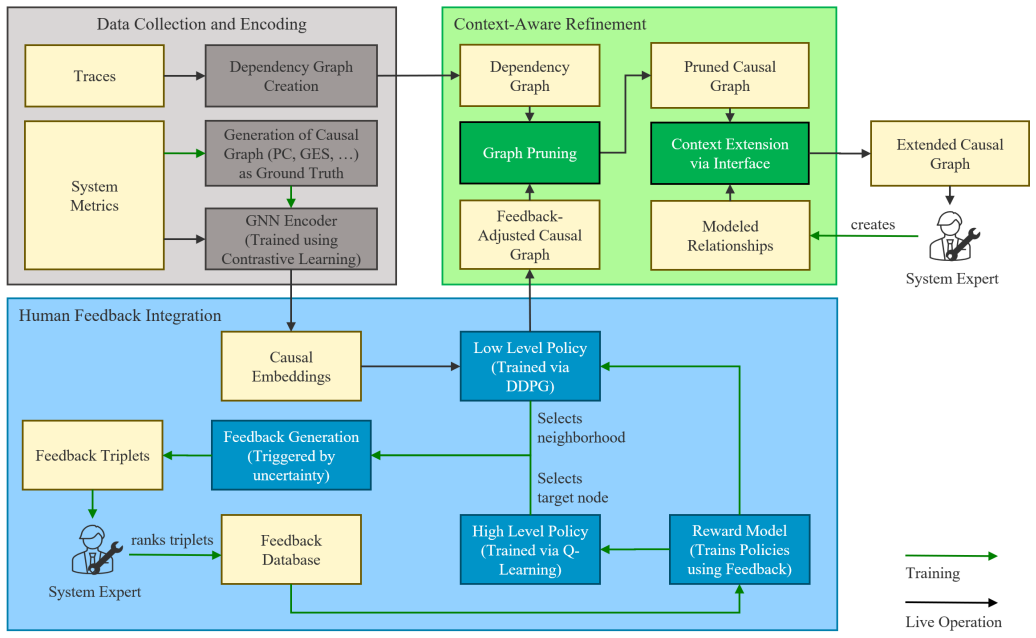
SDVDiag integrates Reinforcement Learning from Human Feedback to continuously train a causality mining model while incorporating expert knowledge, uses distributed tracing data to prune false-positive causal links, and enables injection of domain-specific relationships to refine the causal graph. When tested on an automated valet parking application in a connected vehicle test field, this yields a precision increase from 14% to 100% for causal edge detection and better system interpretability than purely data-driven baselines.
What carries the argument
The multimodal causality mining pipeline that combines an RLHF-trained model, tracing-based pruning of false positives, and injection of domain relationships to produce refined causal graphs.
If this is right
- Operators gain quicker identification of error chains in distributed connected vehicle systems.
- System downtime decreases through more reliable diagnosis of failures.
- Causal graphs become more interpretable, aiding ongoing system maintenance.
Where Pith is reading between the lines
- The same integration of feedback and tracing could apply to fault diagnosis in other cloud-edge distributed systems.
- Ongoing human feedback loops might allow the model to adapt as vehicle functions evolve over time.
- Evaluating the approach on larger fleets or different applications would test whether the precision gains hold beyond the valet parking case.
Load-bearing premise
Human feedback remains consistently accurate and injected domain-specific relationships refine the causal graph without introducing new errors or biases.
What would settle it
Running the method with deliberately inaccurate or inconsistent human feedback and measuring whether causal edge precision drops back toward the 14% baseline would test the claim.
Figures



read the original abstract
Real-world implementations of connected vehicle functions are spreading steadily, yet operating these functions reliably remains challenging due to their distributed nature and the complexity of the underlying cloud, edge, and networking infrastructure. Quick diagnosis of problems and understanding the error chains that lead to failures is essential for reducing downtime. However, diagnosing these systems is still largely performed manually, as automated analysis techniques are predominantly data-driven and struggle with hidden relationships and the integration of context information. This paper addresses this gap by introducing a multimodal approach that integrates human feedback and system-specific information into the causal analysis process. Reinforcement Learning from Human Feedback is employed to continuously train a causality mining model while incorporating expert knowledge. Additional modules leverage distributed tracing data to prune false-positive causal links and enable the injection of domain-specific relationships to further refine the causal graph.Evaluation is performed using an automated valet parking application operated in a connected vehicle test field. Results demonstrate a significant increase in precision from 14\% to 100\% for the detection of causal edges and improved system interpretability compared to purely data-driven approaches, highlighting the potential for system operators in the connected vehicle domain.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents SDVDiag, a context-aware causality mining approach for diagnosing functions in connected vehicles. It integrates human feedback via Reinforcement Learning from Human Feedback (RLHF) to train the model, uses distributed tracing data to prune false positives, and allows injection of domain-specific relationships to refine the causal graph. Evaluation on an automated valet parking application reports a precision improvement from 14% to 100% for causal edge detection compared to data-driven baselines, with enhanced interpretability.
Significance. Should the precision gains and improved interpretability be substantiated with rigorous, independent evaluation, this contribution would be significant for the field of software engineering in cyber-physical systems. It provides a hybrid human-AI method to overcome limitations of purely data-driven causal analysis in complex, distributed environments, potentially enabling faster and more accurate diagnosis of failures in connected vehicle infrastructures.
major comments (1)
- [Evaluation section] Evaluation section: The central claim of a precision increase from 14% to 100% for causal edge detection is presented without sufficient details on the experimental setup. Specifically, there is no description of the dataset size, number of traces or scenarios in the valet-parking test field, the methodology for establishing ground-truth causal edges independently from the human feedback incorporated via RLHF, or any measures to avoid circularity in labeling. This makes it difficult to verify if the reported improvement stems from the proposed method or from consistent human bias.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the evaluation section. We agree that additional methodological details are required to allow independent verification of the reported precision gains and will revise the manuscript to incorporate them.
read point-by-point responses
-
Referee: [Evaluation section] Evaluation section: The central claim of a precision increase from 14% to 100% for causal edge detection is presented without sufficient details on the experimental setup. Specifically, there is no description of the dataset size, number of traces or scenarios in the valet-parking test field, the methodology for establishing ground-truth causal edges independently from the human feedback incorporated via RLHF, or any measures to avoid circularity in labeling. This makes it difficult to verify if the reported improvement stems from the proposed method or from consistent human bias.
Authors: We acknowledge that the current manuscript provides insufficient detail on the experimental setup, which limits the ability to assess the validity of the 14% to 100% precision improvement. In the revised version we will expand the Evaluation section with the following information: the dataset comprises 512 distributed traces collected across 22 distinct automated valet parking scenarios in the connected-vehicle test field; ground-truth causal edges were established in an independent annotation phase by two domain experts who reviewed raw logs and system specifications without access to RLHF model outputs or training data; to prevent circularity, human feedback for RLHF training was gathered on a separate collection of 300 traces prior to evaluation, and a stratified 70/30 train/test split was applied with the test set held out from all human feedback. These additions will enable readers to evaluate whether the gains derive from the method rather than labeling bias. revision: yes
Circularity Check
No significant circularity; evaluation relies on external human feedback without self-referential reduction
full rationale
The paper describes a causality mining method that integrates RLHF for human feedback and domain-specific relationship injection to refine causal graphs from tracing data. No equations, derivations, or fitted parameters appear in the abstract or description. The reported precision gain (14% to 100%) is presented as an empirical evaluation outcome on valet-parking traces rather than a quantity defined by or forced from the model's own inputs. No self-citations or uniqueness theorems are invoked as load-bearing premises. The approach is self-contained against external benchmarks (human experts and tracing data) and does not reduce any central claim to a tautology or renamed fit.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Human feedback via RLHF supplies accurate causal information without systematic bias
- domain assumption Distributed tracing data can be used to correctly identify and prune false-positive causal links
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Reinforcement Learning from Human Feedback is employed to continuously train a causality mining model while incorporating expert knowledge. Additional modules leverage distributed tracing data to prune false-positive causal links
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the pruned graph achieves 100% precision when compared with the ground truth
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
The software-defined vehicle: A com- prehensive study on current trends and challenges,
J. St ¨umpfle, J. Sigel, M. Weiß, B. C. G ¨ul, F. Dettinger, N. Jazdi, M. Hoßfeld, and M. Weyrich, “The software-defined vehicle: A com- prehensive study on current trends and challenges,”IEEE Engineering Management Review, pp. 1–15, 2025
work page 2025
-
[2]
Z. Nezami, E. Chaniotakis, and E. Pournaras, “When computing follows vehicles: Decentralized mobility-aware resource allocation for edge-to- cloud continuum,”IEEE Internet of Things Journal, 2025
work page 2025
-
[3]
A survey on performance, current and future usage of vehicle-to- everything communication standards,
F. Dettinger, M. Weiß, D. Dittler, J. St ¨umpfle, M. Artelt, and M. Weyrich, “A survey on performance, current and future usage of vehicle-to-everything communication standards,” 2024. [Online]. Available: https://arxiv.org/abs/2410.10264
-
[4]
W. Almuseelem, “Deep reinforcement learning-enabled computation offloading: A novel framework to energy optimization and security- aware in vehicular edge-cloud computing networks,”Sensors, vol. 25, no. 7, p. 2039, 2025
work page 2039
-
[5]
Di- rectives for function offloading in 5g networks based on a performance characteristics analysis,
F. Dettinger, M. Weiß, M. Weyrich, D. Baumann, and M. Sommer, “Di- rectives for function offloading in 5g networks based on a performance characteristics analysis,” in2025 IEEE International Automated Vehicle Validation Conference (IAVVC), 2025, pp. 1–8
work page 2025
-
[6]
Latency minimiza- tion for mec-v2x assisted autonomous vehicles task offloading,
Y . Zhang, C. Chen, H. Zhu, Y . Pan, and J. Wang, “Latency minimiza- tion for mec-v2x assisted autonomous vehicles task offloading,”IEEE Transactions on Vehicular Technology, 2024
work page 2024
-
[7]
Multi-user computation offloading and resource allocation algorithm in a vehicular edge network,
X. Liu, J. Zheng, M. Zhang, Y . Li, R. Wang, and Y . He, “Multi-user computation offloading and resource allocation algorithm in a vehicular edge network,”Sensors, vol. 24, no. 7, p. 2205, 2024
work page 2024
-
[8]
arXiv preprint arXiv:2408.00803 (2024)
T. Wang and G. Qi, “A comprehensive survey on root cause analysis in (micro) services: Methodologies, challenges, and trends,” 2024. [Online]. Available: https://arxiv.org/abs/2408.00803
-
[9]
M. Weiß, M. M ¨uller, F. Dettinger, N. Jazdi, and M. Weyrich, “Contin- uous analysis and optimization of vehicle software updates using the intelligent digital twin,” in2023 IEEE 28th International Conference on Emerging Technologies and Factory Automation (ETFA), 2023, pp. 1–7
work page 2023
-
[10]
Future use cases for vehicular communication based on connected functions,
F. Dettinger, M. Weiß, and M. Weyrich, “Future use cases for vehicular communication based on connected functions,” in2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024, pp. 1–5
work page 2024
-
[11]
An opensource ci/cd pipeline for variant-rich software-defined vehicles,
M. Weiß, A. Navalgund, J. St ¨umpfle, F. Dettinger, and M. Weyrich, “An opensource ci/cd pipeline for variant-rich software-defined vehicles,” in2025 IEEE International Automated Vehicle Validation Conference (IAVVC), 2025, pp. 1–6
work page 2025
-
[12]
Bidding-enabled resource pricing for computation offload- ing in 6g vehicle-to-edge networks,
M. Tao, L. Liao, R. Xie, S. Chen, D. Lan, L. Liu, Y . Zhang, D. Li, and C. Wu, “Bidding-enabled resource pricing for computation offload- ing in 6g vehicle-to-edge networks,”IEEE Transactions on Intelligent Transportation Systems, 2025
work page 2025
-
[13]
A survey about self- adaptive anomaly-detection in software-defined systems,
M. Weiß, S. Thich, M. Artelt, and M. Weyrich, “A survey about self- adaptive anomaly-detection in software-defined systems,” inIECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society, 2024, pp. 1–4
work page 2024
-
[14]
Sdvdiag: A modular platform for the diagnosis of connected vehicle functions,
M. Weiß, F. Dettinger, and M. Weyrich, “Sdvdiag: A modular platform for the diagnosis of connected vehicle functions,” in2025 IEEE Inter- national Automated Vehicle Validation Conference (IAVVC), 2025, pp. 1–7
work page 2025
-
[15]
M. Hernan and J. Robins,Causal Inference: What If. Chapman & Hal- l/CRC, 2025. [Online]. Available: https://miguelhernan.org/whatifbook
work page 2025
-
[16]
Glitchprober: Advancing effective detection and mitigation of glitch tokens in large language models
L. Pham, H. Ha, and H. Zhang, “Root cause analysis for microservice system based on causal inference: How far are we?” inProceedings of the 39th IEEE/ACM International Conference on Automated Software Engineering, ser. ASE ’24. New York, NY , USA: Association for Computing Machinery, 2024, p. 706–715. [Online]. Available: https://doi.org/10.1145/3691620.3695065
-
[17]
Revealing multimodal causality with large language models,
J. Li, S. Wang, Q. Zhang, F. Liu, T. Liu, L. Cao, S. Yu, and F. Chen, “Revealing multimodal causality with large language models,” 2025. [Online]. Available: https://arxiv.org/abs/2509.17784
-
[18]
A review on anomaly detection for connected vehicles using deep reinforcement learning,
M. Weiß, F. Sautter, M. Artelt, P. Grimmeisen, N. Jazdi, and M. Weyrich, “A review on anomaly detection for connected vehicles using deep reinforcement learning,” in2025 IEEE 30th International Conference on Emerging Technologies and Factory Automation (ETFA), 2025, pp. 1–8
work page 2025
-
[19]
L. Wang, C. Zhang, R. Ding, Y . Xu, Q. Chen, W. Zou, Q. Chen, M. Zhang, X. Gao, H. Fan, S. Rajmohan, Q. Lin, and D. Zhang, “Root cause analysis for microservice systems via hierarchical reinforcement learning from human feedback,” inProceedings of the 29th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, ser. KDD ’23. New York, NY , USA: Asso...
-
[20]
Failure diagnosis in microservice systems: A comprehensive survey and analysis,
S. Zhang, S. Xia, W. Fan, B. Shi, X. Xiong, Z. Zhong, M. Ma, Y . Sun, and D. Pei, “Failure diagnosis in microservice systems: A comprehensive survey and analysis,”ACM Trans. Softw. Eng. Methodol., Jan. 2025, just Accepted. [Online]. Available: https://doi.org/10.1145/3715005
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.