Recognition: 2 theorem links
· Lean TheoremExtended Hybrid Timed Petri Nets with Semi-Supervised Anomaly Detection for Switched Systems, Modelling and Fault Detection
Pith reviewed 2026-05-13 17:07 UTC · model grok-4.3
The pith
An extended timed continuous Petri net with marking-dependent flows generates residuals that semi-supervised detectors use to identify faults in hybrid switched systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
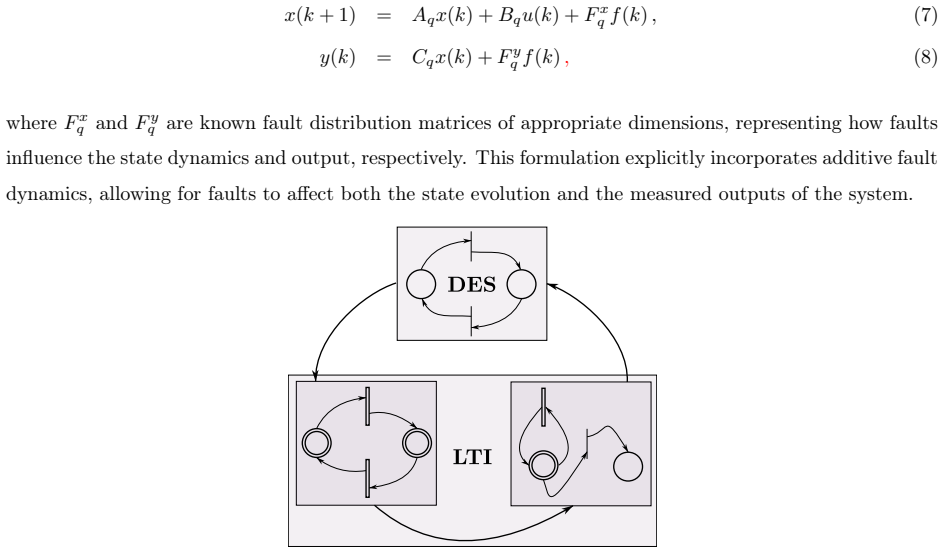
The central claim is that extending hybrid timed continuous Petri nets with marking-dependent flow functions creates an intrinsic coupling between discrete and continuous dynamics, allowing a mode-dependent hybrid observer whose stability is guaranteed by offline LMIs and whose residuals enable semi-supervised anomaly detectors trained solely on normal data to detect discrete, continuous, and hybrid faults with high accuracy and low false alarms.
What carries the argument
Extended Timed Continuous Petri Net (ETCPN) featuring marking-dependent flow functions that intrinsically couple discrete and continuous dynamics in switched systems.
If this is right
- The observer design ensures stability under arbitrary switching sequences via precomputed gains.
- Residuals from the model allow detection of three fault classes without requiring labeled fault examples.
- OC-SVM and SVDD achieve the best balance of detection rate and false alarm rate among tested methods.
- The approach confines computational load to offline LMI solving, supporting real-time monitoring.
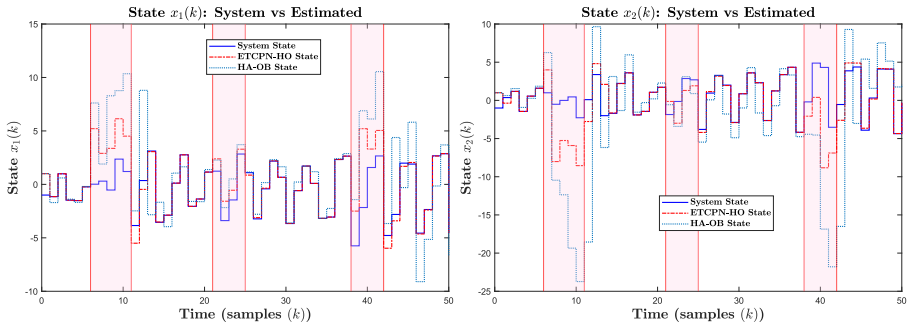
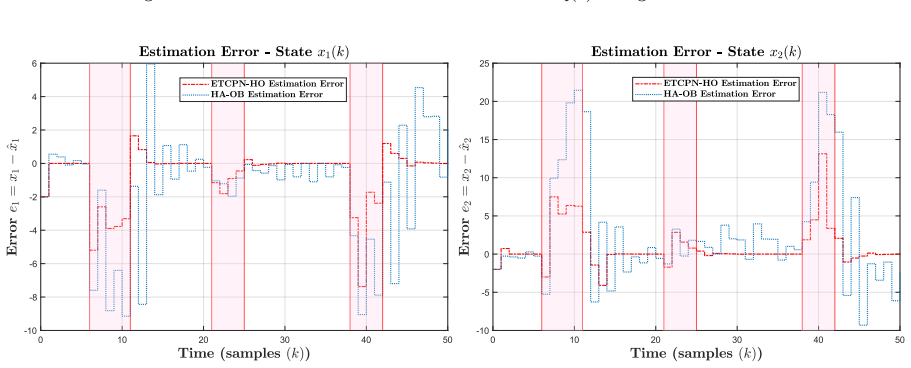
- Validation on simulated hybrid faults confirms robust performance and fast convergence.
Where Pith is reading between the lines
- This modeling choice could simplify controller design for hybrid systems by providing a unified representation usable beyond detection.
- If the residuals prove informative across real-world plants, the method might reduce the data requirements for industrial fault monitoring.
- Extending the framework to include online parameter updates could handle slowly drifting system parameters without retraining the detectors.
- Neighbouring problems such as hybrid system identification might benefit from the same marking-dependent flow structure.
Load-bearing premise
The hybrid observer remains stable for any switching pattern when its gains come from offline LMIs, and the residuals it produces carry enough information for detectors trained only on normal data to separate all fault types without raising many false alarms.
What would settle it
Running the system under rapid arbitrary mode switches while injecting one of the three fault types and observing whether the observer states diverge or the semi-supervised detectors produce detection rates below 80 percent with elevated false alarms.
Figures























read the original abstract
Hybrid physical systems combine continuous and discrete dynamics, which can be simultaneously affected by faults. Conventional fault detection methods often treat these dynamics separately, limiting their ability to capture interacting fault patterns. This paper proposes a unified fault detection framework for hybrid dynamical systems by integrating an Extended Timed Continuous Petri Net (ETCPN) model with semi-supervised anomaly detection. The proposed ETCPN extends existing Petri net formalisms by introducing marking-dependent flow functions, enabling intrinsic coupling between discrete and continuous dynamics. Based on this structure, a mode-dependent hybrid observer is designed, whose stability under arbitrary switching is ensured via Linear Matrix Inequalities (LMIs), solved offline to determine observer gains. The observer generates residuals that reflect discrepancies between the estimated and measured outputs. These residuals are processed using semi-supervised methods, including One-Class SVM (OC-SVM), Support Vector Data Description (SVDD), and Elliptic Envelope (EE), trained exclusively on normal data to avoid reliance on labeled faults. The framework is validated through simulations involving discrete faults, continuous faults, and hybrid faults. Results demonstrate high detection accuracy, fast convergence, and robust performance, with OC-SVM and SVDD providing the best trade-off between detection rate and false alarms. The framework is computationally efficient for real-time deployment, as the main complexity is confined to the offline LMI design phase.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an Extended Timed Continuous Petri Net (ETCPN) formalism that introduces marking-dependent flow functions to intrinsically couple discrete and continuous dynamics in hybrid switched systems. It designs a mode-dependent hybrid observer whose gains are computed offline via LMIs to guarantee stability under arbitrary switching, generates residuals from the observer, and feeds them to semi-supervised detectors (OC-SVM, SVDD, EE) trained exclusively on nominal data to identify discrete, continuous, and hybrid faults. Simulations are reported to show high detection accuracy, fast convergence, and good trade-offs between detection rate and false alarms, with the main computational burden confined to the offline LMI phase.
Significance. If the stability guarantee and residual informativeness hold without post-hoc tuning, the work would offer a unified modeling and detection framework that avoids treating discrete and continuous faults separately, potentially advancing fault diagnosis for switched hybrid systems by combining Petri-net structure with semi-supervised anomaly detection. The offline LMI design and normal-data-only training are practical strengths for real-time deployment.
major comments (2)
- [Observer design and stability] Observer design and stability section: The claim that the mode-dependent hybrid observer remains asymptotically stable under arbitrary switching when gains are obtained from offline per-mode LMIs is load-bearing for the central claim, yet the manuscript does not indicate whether a common quadratic Lyapunov matrix P > 0 is enforced across all modes or whether dwell-time constraints are imposed. For switched linear systems, independent per-mode LMIs without such coupling generally fail to guarantee arbitrary-switching stability, allowing potential divergence under rapid switching; this must be clarified with the explicit LMI formulation and common-P condition if used.
- [Simulation and validation] Simulation and validation section: The abstract and results claim high detection accuracy and robust performance for all three fault classes, but without explicit LMI conditions, residual definitions, quantitative tables (detection rates, false-alarm rates, convergence times), or ablation on the semi-supervised detectors, it is impossible to confirm that the reported performance is not the result of post-hoc parameter tuning on the test faults; this undermines the claim that residuals are sufficiently informative when detectors are trained only on normal data.
minor comments (2)
- [Modeling] Notation for the marking-dependent flow functions and the ETCPN incidence matrices should be defined more explicitly in the modeling section to avoid ambiguity when deriving the continuous dynamics.
- [Introduction] The paper should include a brief comparison table contrasting the proposed ETCPN with standard hybrid Petri nets (e.g., on coupling mechanism and fault modeling capability) to highlight the extension.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which help strengthen the manuscript. We address each major point below and agree that clarifications and additions are required for rigor. The revised version will incorporate explicit LMI formulations and quantitative simulation details.
read point-by-point responses
-
Referee: [Observer design and stability] Observer design and stability section: The claim that the mode-dependent hybrid observer remains asymptotically stable under arbitrary switching when gains are obtained from offline per-mode LMIs is load-bearing for the central claim, yet the manuscript does not indicate whether a common quadratic Lyapunov matrix P > 0 is enforced across all modes or whether dwell-time constraints are imposed. For switched linear systems, independent per-mode LMIs without such coupling generally fail to guarantee arbitrary-switching stability, allowing potential divergence under rapid switching; this must be clarified with the explicit LMI formulation and common-P condition if used.
Authors: We agree that the common Lyapunov matrix condition was not stated explicitly. The observer design uses a single common quadratic Lyapunov matrix P > 0 shared across all modes, with per-mode gains L_i computed offline via LMIs of the form (A_i - L_i C_i)^T P + P (A_i - L_i C_i) < 0 for each mode i. This common-P formulation guarantees asymptotic stability under arbitrary switching without dwell-time constraints. We will revise the manuscript to present the full set of LMIs, the common-P requirement, and the associated proof sketch. revision: yes
-
Referee: [Simulation and validation] Simulation and validation section: The abstract and results claim high detection accuracy and robust performance for all three fault classes, but without explicit LMI conditions, residual definitions, quantitative tables (detection rates, false-alarm rates, convergence times), or ablation on the semi-supervised detectors, it is impossible to confirm that the reported performance is not the result of post-hoc parameter tuning on the test faults; this undermines the claim that residuals are sufficiently informative when detectors are trained only on normal data.
Authors: We acknowledge the need for greater transparency. The revised manuscript will include: (i) the explicit LMI conditions and common P used for observer design, (ii) the precise residual definition r(k) = y(k) - C x̂(k), (iii) quantitative tables reporting detection rates, false-alarm rates, and convergence times for discrete, continuous, and hybrid faults under each detector (OC-SVM, SVDD, EE), and (iv) an ablation study on detector hyperparameters performed exclusively via cross-validation on normal training data. These additions will demonstrate that the reported performance stems from informative residuals rather than test-set tuning. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper introduces the ETCPN extension via marking-dependent flow functions, designs a mode-dependent hybrid observer whose gains are obtained by solving LMIs offline, generates residuals from the observer, and feeds them to semi-supervised anomaly detectors (OC-SVM, SVDD, EE) trained exclusively on normal data. None of these steps reduces a reported detection performance metric to a fitted quantity on the same fault test cases, nor does any central claim collapse by definition or self-citation to its own inputs. The LMI-based stability assertion and the anomaly-detection training protocol are independent of the final simulation results; whether the specific LMI formulation actually guarantees arbitrary-switching stability is a separate correctness question outside the scope of circularity analysis.
Axiom & Free-Parameter Ledger
free parameters (1)
- Observer gains
axioms (1)
- domain assumption Existence of feasible LMIs that guarantee stability of the mode-dependent hybrid observer under arbitrary switching
invented entities (1)
-
Extended Timed Continuous Petri Net (ETCPN)
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The proposed ETCPN extends existing Petri net formalisms by introducing marking-dependent flow functions... stability under arbitrary switching is ensured via Linear Matrix Inequalities (LMIs)
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanalpha_pin_under_high_calibration unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
observer gains... solved offline to obtain the observer gains for each discrete mode
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Constrained computational hybrid controller for input affine hybrid dynamical systems,
A. Taghavian, A. Safi, and E. Khanmirza, “Constrained computational hybrid controller for input affine hybrid dynamical systems,”Journal of the Franklin Institute, vol. 361, no. 17, p. 107142, 2024
work page 2024
-
[2]
An efficient statistical-based approach for road traffic congestion monitoring,
Z. Abdelhafid, F. Harrou, and Y. Sun, “An efficient statistical-based approach for road traffic congestion monitoring,” in2017 5th International Conference on Electrical Engineering - Boumerdes (ICEE-B), 2017, pp. 1–5
work page 2017
-
[3]
Structural fault detection and isolation in hybrid systems,
H. Khorasgani and G. Biswas, “Structural fault detection and isolation in hybrid systems,”IEEE Trans- actions on Automation Science and Engineering, vol. 15, no. 4, pp. 1585–1599, 2018
work page 2018
-
[4]
A hybrid fault diagnosis strategy for chemical process startups,
Z. Wang, J. Zhao, and H. Shang, “A hybrid fault diagnosis strategy for chemical process startups,” Journal of Process Control, vol. 22, no. 7, pp. 1287–1297, 2012
work page 2012
-
[5]
Novel approach for industrial process anomaly detection based on process mining,
Y. Shi, N. Zhang, X. Song, H. Li, and Q. Zhu, “Novel approach for industrial process anomaly detection based on process mining,”Journal of Process Control, vol. 136, p. 103165, 2024
work page 2024
-
[6]
Observer-based fault-tolerant control for a class of hybrid impulsive systems,
H. Yang, B. Jiang, and V. Cocquempot, “Observer-based fault-tolerant control for a class of hybrid impulsive systems,”International Journal of Robust and Nonlinear Control, vol. 20, no. 4, pp. 448–459, 2010
work page 2010
-
[7]
Model-based diagnosis of hybrid systems using satisfiability modulo theory,
A. Diedrich, A. Maier, and O. Niggemann, “Model-based diagnosis of hybrid systems using satisfiability modulo theory,”Proceedings of the AAAI Conference on Artificial Intelligence, vol. 33, no. 01, pp. 1452–1459, Jul. 2019
work page 2019
-
[8]
Mode estimation of probabilistic hybrid systems,
M. W. Hofbaur and B. C. Williams, “Mode estimation of probabilistic hybrid systems,” inHybrid Systems: Computation and Control, C. J. Tomlin and M. R. Greenstreet, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 2002, pp. 253–266. 43
work page 2002
-
[9]
A new strategy of adaptive observer based fault isolation,
H. Liu, M. Zhong, and Y. Liu, “A new strategy of adaptive observer based fault isolation,”IFAC- PapersOnLine, vol. 51, no. 24, pp. 1373–1378, 2018, 10th IFAC Symposium on Fault Detection, Super- vision and Safety for Technical Processes SAFEPROCESS 2018
work page 2018
-
[10]
Y.-H. Lien, C.-C. Peng, and Y.-H. Chen, “Adaptive observer-based fault detection and fault-tolerant control of quadrotors under rotor failure conditions,”Applied Sciences, vol. 10, no. 10, 2020
work page 2020
-
[11]
Dynamic hybrid observer-based early slipping fault detection for high-speed train wheelsets,
S. Yin, T. Peng, C. Yang, C. Yang, Z. Chen, and W. Gui, “Dynamic hybrid observer-based early slipping fault detection for high-speed train wheelsets,”Control Engineering Practice, vol. 142, p. 105736, 2024
work page 2024
-
[12]
J.-J. Yan, C. Deng, W.-W. Che, and X.-X. Liu, “Fault estimation for cyber–physical systems with inter- mittent measurement transmissions via a hybrid observer approach,”Journal of the Franklin Institute, vol. 361, no. 3, pp. 1497–1509, 2024
work page 2024
-
[13]
Identification of hybrid dynamic systems via a sparse regression algorithm,
N. Novelli, P. Belardinelli, and S. Lenci, “Identification of hybrid dynamic systems via a sparse regression algorithm,”Nonlinear Dynamics, vol. 113, no. 16, pp. 20565–20588, Aug. 2025
work page 2025
-
[14]
A piecewise switched linear approach for traffic flow modeling,
A. Zeroual, N. Messai, S. Kechida, and F. Hamdi, “A piecewise switched linear approach for traffic flow modeling,”International Journal of Automation and Computing, vol. 14, no. 6, pp. 729–741, Dec. 2017
work page 2017
-
[15]
Calibration and validation of a switched linear macroscopic traffic model,
——, “Calibration and validation of a switched linear macroscopic traffic model,” in2015 3rd Inter- national Conference on Control, Engineering & Information Technology (CEIT). IEEE, 2015, pp. 1–5
work page 2015
-
[16]
Stability, control and fault diagnosis of switched linear parameter varying systems: A survey,
Y. Zhu, J. Che, F. Wu, X. Chen, W. Zheng, and D. Zhou, “Stability, control and fault diagnosis of switched linear parameter varying systems: A survey,”IEEE/CAA Journal of Automatica Sinica, vol. 12, no. 9, pp. 1745–1761, 2025
work page 2025
-
[17]
Traffic congestion detection based on hybrid observer and glr test,
F. Harrou, A. Zeroual, and Y. Sun, “Traffic congestion detection based on hybrid observer and glr test,” in2018 Annual American Control Conference (ACC), 2018, pp. 604–609
work page 2018
-
[18]
Y. Chen, Y.-E. Wang, and D. Wu, “Hybrid state observer-based event-triggered control for switched linear systems with quantized input,”Journal of the Franklin Institute, vol. 358, no. 17, pp. 9086–9109, 2021
work page 2021
-
[19]
A discussion on fault detection for a class of hybrid petri nets,
D. Lefebvre and E. Aguayo-Lara, “A discussion on fault detection for a class of hybrid petri nets,” IFAC-PapersOnLine, vol. 50, no. 1, pp. 6837–6842, 2017, 20th IFAC World Congress
work page 2017
-
[20]
Modeling and stability analysis of state-switched hybrid systems via differential petri nets,
G. Davrazos and N. T. Koussoulas, “Modeling and stability analysis of state-switched hybrid systems via differential petri nets,”Simulation Modelling Practice and Theory, vol. 15, no. 8, pp. 879–893, 2007. 44
work page 2007
-
[21]
F. Chen, L. Wang, B. Jiang, and C. Wen, “A novel hybrid petri net model for urban intersection and its application in signal control strategy,”Journal of the Franklin Institute, vol. 351, no. 8, pp. 4357–4380, 2014
work page 2014
-
[22]
K. Renganathan and V. Bhaskar, “An observer based approach for achieving fault diagnosis and fault tolerant control of systems modeled as hybrid petri nets,”ISA Transactions, vol. 50, no. 3, pp. 443–453, 2011
work page 2011
-
[23]
Transforming time petri nets into heterogeneous petri nets for hybrid system monitoring,
L. Hatte, P. Ribot, and E. Chanthery, “Transforming time petri nets into heterogeneous petri nets for hybrid system monitoring,”IFAC-PapersOnLine, vol. 58, no. 4, pp. 646–651, 2024, 12th IFAC Symposium on Fault Detection, Supervision and Safety for Technical Processes SAFEPROCESS 2024
work page 2024
-
[24]
C. Petri, “Kommunikation mit automaten,” Ph.D. dissertation, TU Darmstadt, 1962
work page 1962
-
[25]
Hybrid timed petri net framework for switched dynamical system mod- elling,
H. Fatiha and Z. Abdelhafid, “Hybrid timed petri net framework for switched dynamical system mod- elling,” in2024 12th International Conference on Systems and Control (ICSC), 2024, pp. 306–311
work page 2024
-
[26]
Challenges in application of petri nets in manufacturing systems,
I. Grobelna and A. Karatkevich, “Challenges in application of petri nets in manufacturing systems,” Electronics, vol. 10, no. 18, 2021
work page 2021
-
[27]
C. Kahraman and F. Tüysüz,Manufacturing System Modeling Using Petri Nets. Berlin, Heidelberg: Springer Berlin Heidelberg, 2010, pp. 95–124
work page 2010
-
[28]
A petri net model for electrical power systems operating procedures,
G. Vescio, P. Riccobon, U. Grasselli, and F. De Angelis, “A petri net model for electrical power systems operating procedures,” in2015 Annual Reliability and Maintainability Symposium (RAMS), 2015, pp. 1–6
work page 2015
-
[29]
Modelling and controlling traffic behaviour with continuous petri nets,
J. Júlvez and R. Boel, “Modelling and controlling traffic behaviour with continuous petri nets,”IFAC Proceedings Volumes, vol. 38, no. 1, pp. 43–48, 2005, 16th IFAC World Congress
work page 2005
-
[30]
Modeling and analysis of urban traffic system based on colored petri nets,
X. Liang, Y. Dang, and Y. Hou, “Modeling and analysis of urban traffic system based on colored petri nets,” in2021 IEEE International Conference on Networking, Sensing and Control (ICNSC), vol. 1, 2021, pp. 1–6
work page 2021
-
[31]
Petri nets for systems and synthetic biology,
M. Heiner, D. Gilbert, and R. Donaldson, “Petri nets for systems and synthetic biology,” inFormal Methods for Computational Systems Biology, M. Bernardo, P. Degano, and G. Zavattaro, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 2008, pp. 215–264
work page 2008
-
[32]
A petri net extension for systems of concurrent com- municating agents with durable actions,
K. Mecheraoui, I. A. Lomazova, and N. Belala, “A petri net extension for systems of concurrent com- municating agents with durable actions,”Journal of Parallel and Distributed Computing, vol. 155, pp. 14–23, 2021. 45
work page 2021
-
[33]
N.Ali, S.Punnekkat, andA.Rauf, “Modelingandsafetyanalysisforcollaborativesafety-criticalsystems using hierarchical colored petri nets,”Journal of Systems and Software, vol. 210, p. 111958, 2024
work page 2024
-
[34]
R. David and H. Alla,Discrete, Continuous, and Hybrid Petri Nets. Berlin/Heidelberg: Springer- Verlag, 2005
work page 2005
-
[35]
Continuous and hybrid petri nets,
H. ALLA and R. DAVID, “Continuous and hybrid petri nets,”Journal of Circuits, Systems and Com- puters, vol. 08, no. 01, pp. 159–188, 1998
work page 1998
-
[36]
Differentialpetrinets: representingcontinuoussystemsinadiscrete- event world,
I.DemongodinandN.Koussoulas, “Differentialpetrinets: representingcontinuoussystemsinadiscrete- event world,”IEEE Transactions on Automatic Control, vol. 43, no. 4, pp. 573–579, 1998
work page 1998
-
[37]
A hybrid Petri nets model of networked manufactur- ing systems and its control system architecture,
F. Chan, Z. Wang, J. Zhang, and F. T. Chan, “A hybrid Petri nets model of networked manufactur- ing systems and its control system architecture,”Journal of Manufacturing Technology Management, vol. 16, no. 1, pp. 36–52, Jan. 2005
work page 2005
-
[38]
G. Cavone, M. Dotoli, N. Epicoco, M. Franceschelli, and C. Seatzu, “Hybrid petri nets to re-design low- automated production processes: the case study of a sardinian bakery,”IFAC-PapersOnLine, vol. 51, no. 7, pp. 265–270, 2018, 14th IFAC Workshop on Discrete Event Systems WODES 2018
work page 2018
-
[39]
On modelling urban transportation networks via hybrid petri nets,
A. D. Febbraro and N. Sacco, “On modelling urban transportation networks via hybrid petri nets,” Control Engineering Practice, vol. 12, no. 10, pp. 1225–1239, 2004, analysis and Design of Hybrid Systems
work page 2004
-
[40]
J. Mishra, P. K. Behera, M. Pattnaik, and B. C. Babu, “A multi-agent petri net model power man- agement strategy for wind–solar-battery driven dc microgrid,”Sustainable Energy Technologies and Assessments, vol. 55, p. 102859, 2023
work page 2023
-
[41]
C. Brinkrolf, L. Ochel, and R. Hofestädt, “Vanesa: An open-source hybrid functional petri net modeling and simulation environment in systems biology,”Biosystems, vol. 210, p. 104531, 2021
work page 2021
-
[42]
Modeling and analysis using hybrid petri nets,
L. Ghomri and H. Alla, “Modeling and analysis using hybrid petri nets,”Nonlinear Analysis: Hybrid Systems, vol. 1, no. 2, pp. 141–153, 2007, nonlinear Hybrid Control Systems
work page 2007
-
[43]
Using Petri Net Tools to Study Properties and Dynamics of Biological Systems,
M. Peleg, D. Rubin, and R. B. Altman, “Using Petri Net Tools to Study Properties and Dynamics of Biological Systems,”Journal of the American Medical Informatics Association, vol. 12, no. 2, pp. 181–199, Mar. 2005
work page 2005
-
[44]
Fault diagnosis in discrete event systems modeled by signal interpreted petri nets,
A. Köhler and P. Zhang, “Fault diagnosis in discrete event systems modeled by signal interpreted petri nets,”IFAC-PapersOnLine, vol. 56, no. 2, pp. 4576–4581, 2023, 22nd IFAC World Congress. 46
work page 2023
-
[45]
Modeling and analyzing cyber physical systems using high level petri nets,
X. He, “Modeling and analyzing cyber physical systems using high level petri nets,” in2018 IEEE International Conference on Software Quality, Reliability and Security Companion (QRS-C), 2018, pp. 469–476
work page 2018
-
[46]
Z. Jiang, H. Wang, and W. Wang, “A petri net strategy for fault diagnosis and location in power distribution systems to prevent local power shortages,”IEEE Access, vol. 12, pp. 161038–161053, 2024
work page 2024
-
[47]
Trust-based petri net model for fault detection and treatment in automated manufacturing systems,
E. A. Alzalab, A. M. El-Sherbeeny, M. A. El-Meligy, and H. T. Rauf, “Trust-based petri net model for fault detection and treatment in automated manufacturing systems,”IEEE Access, vol. 9, pp. 157997– 158009, 2021
work page 2021
-
[48]
Fault diagnosis for discrete events systems described by partially observed petri nets,
F. Arichi, B. Cherki, M. Djemai, and S. Djouadi, “Fault diagnosis for discrete events systems described by partially observed petri nets,”ISA Transactions, vol. 128, pp. 220–228, 2022
work page 2022
-
[49]
Diagnosabilization of time petri net for timed fault,
C. Coquand, Y. Pencolé, and A. Subias, “Diagnosabilization of time petri net for timed fault,”IFAC- PapersOnLine, vol. 56, no. 2, pp. 8648–8653, 2023, 22nd IFAC World Congress
work page 2023
-
[50]
B. I. de Freitas and J. C. Basilio, “Online fault diagnosis of discrete event systems modeled by labeled petri nets using labeled priority petri nets*,”IFAC-PapersOnLine, vol. 55, no. 28, pp. 329–336, 2022, 16th IFAC Workshop on Discrete Event Systems WODES 2022
work page 2022
-
[51]
H. Zhang, “Robust fault diagnosis for discrete-time switched system with unknown state delays subject to component faults,”Information Technology and Control, vol. 48, no. 1, pp. 146–159, 2019
work page 2019
-
[52]
M. G. Kazemi and M. Montazeri, “A new hybrid robust fault detection of switching systems by combina- tion of observer and bond graph method,”International Journal of Electrical and Computer Engineering (IJECE), vol. 8, no. 4, 2018
work page 2018
-
[53]
Actuator fault detection for the discrete-time switched systems based on delta operator approach,
D. Du, Y. Wu, Y. Yang, and Z. Mao, “Actuator fault detection for the discrete-time switched systems based on delta operator approach,”Optimal Control Applications and Methods, vol. 43, no. 2, pp. 476–494, 2022
work page 2022
-
[54]
On-line switched robust fault detection framework for switched systems with unknown inputs,
R. E. Harabi, M. Atitallah, and M. N. Abdelkrim, “On-line switched robust fault detection framework for switched systems with unknown inputs,”Measurement and Control, p. 00202940251339800, 2025
work page 2025
-
[55]
S. Yahia, S. Bedoui, and K. Abderrahim, “Actuator fault tolerant control in switched systems: A com- prehensive approach integrating clustering, classification, and lmi-based compensation,”IEEE Access, vol. 13, pp. 44090–44106, 2025. 47
work page 2025
-
[56]
J.-H. Song and K.-H. Kim, “A practical approach to localize simultaneous triple open-switches for a pwm inverter-fed permanent magnet synchronous machine drive system,”Energies, vol. 11, no. 1, 2018
work page 2018
-
[57]
Sensor fault detection and fault-tolerant control for buck converter via affine switched systems,
J. Li, K. Pan, Q. Su, and X.-Q. Zhao, “Sensor fault detection and fault-tolerant control for buck converter via affine switched systems,”IEEE Access, vol. 7, pp. 47124–47134, 2019
work page 2019
-
[58]
J. Li, K. Pan, and Q. Su, “Robust fault detection and adaptive parameter identification for dc-dc converters via switched systems,”International Journal of Adaptive Control and Signal Processing, vol. 34, no. 11, pp. 1642–1657, 2020
work page 2020
-
[59]
A survey of timed automata for the development of real-time systems,
M. T. B. Waez, J. Dingel, and K. Rudie, “A survey of timed automata for the development of real-time systems,”Computer Science Review, vol. 9, pp. 1–26, 2013
work page 2013
-
[60]
Petri nets and automatic control: A historical perspective,
A. Giua and M. Silva, “Petri nets and automatic control: A historical perspective,”Annual Reviews in Control, vol. 45, pp. 223–239, 2018
work page 2018
-
[61]
Extended timed petri net modelling approach for a class of hybrid dynamic systems,
H. Fatiha and Z. Abdelhafid, “Extended timed petri net modelling approach for a class of hybrid dynamic systems,” in2024 International Conference of the African Federation of Operational Research Societies (AFROS), 2024, pp. 1–6
work page 2024
-
[62]
C. Vardakis, I. Dimolitsas, D. Spatharakis, D. Dechouniotis, A. Zafeiropoulos, and S. Papavassiliou, “A petri net-based framework for modeling and simulation of resource scheduling policies in edge cloud continuum,”Simulation Modelling Practice and Theory, vol. 141, p. 103098, 2025
work page 2025
-
[63]
Gradient-based controllers for timed continuous petri nets,
D. Lefebvre, E. Leclercq, F. Druaux, and P. Thomas, “Gradient-based controllers for timed continuous petri nets,”International Journal of Systems Science, vol. 46, no. 9, pp. 1661–1678, 2015
work page 2015
-
[64]
Hybrid observer design for linear switched system via differential petri nets,
F. Hamdi, N. Manamanni, N. Messai, and K. Benmahammed, “Hybrid observer design for linear switched system via differential petri nets,”Nonlinear Analysis: Hybrid Systems, vol. 3, no. 3, pp. 310–322, 2009
work page 2009
-
[65]
Estimating the support of a high-dimensional distribution,
B. Schölkopf, J. C. Platt, J. Shawe-Taylor, A. J. Smola, and R. C. Williamson, “Estimating the support of a high-dimensional distribution,”Neural Computation, vol. 13, no. 7, pp. 1443–1471, 2001
work page 2001
-
[66]
Support vector domain description,
D. M. Tax and R. P. Duin, “Support vector domain description,”Pattern Recognition Letters, vol. 20, no. 11, pp. 1191–1199, 1999
work page 1999
-
[67]
A fast algorithm for the minimum covariance determinant esti- mator,
P. J. Rousseeuw and K. V. Driessen, “A fast algorithm for the minimum covariance determinant esti- mator,”Technometrics, vol. 41, no. 3, pp. 212–223, 1999
work page 1999
-
[68]
Support Vector Data Description,
D. M. Tax and R. P. Duin, “Support Vector Data Description,”Machine Learning, vol. 54, no. 1, pp. 45–66, Jan. 2004. 48
work page 2004
-
[69]
Road traffic density estimation and congestion detection with a hybrid observer-based strategy,
A. Zeroual, F. Harrou, and Y. Sun, “Road traffic density estimation and congestion detection with a hybrid observer-based strategy,”Sustainable Cities and Society, vol. 46, p. 101411, 2019. 49
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.