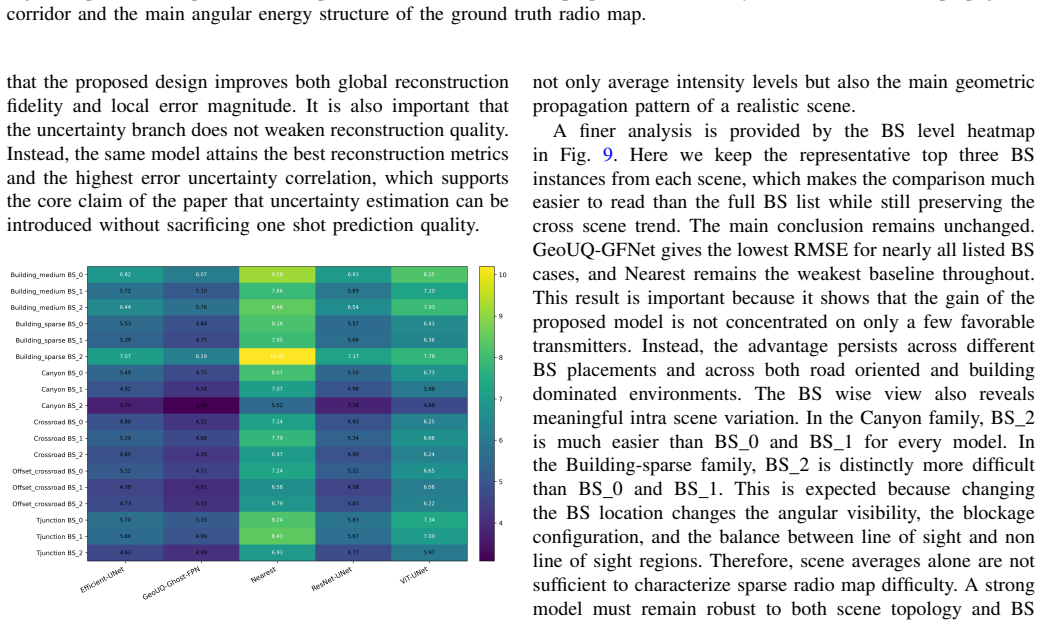
Sparse Gain Radio Map Reconstruction With Geometry Priors and Uncertainty-Guided Measurement Selection
Pith reviewed 2026-05-10 20:06 UTC · model grok-4.3
The pith
A lightweight network reconstructs dense urban radio maps from sparse measurements by combining building geometry with uncertainty estimates that guide where to sample next.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
GeoUQ-GFNet jointly predicts a dense gain radio map and a spatial uncertainty map from sparse measurements together with structured scene priors; the uncertainty map is then used to select additional measurements that yield greater reconstruction improvement than fixed sampling patterns under identical budgets, with strong performance maintained across diverse urban scenes and transmitter locations in the UrbanRT-RM benchmark.
What carries the argument
GeoUQ-GFNet, a lightweight network that ingests sparse measurements plus structured scene geometry priors to produce both a predicted dense gain radio map and a spatial uncertainty map whose values directly inform active selection of new measurement sites.
If this is right
- The proposed method delivers strong and consistent reconstruction performance across different scenes and transmitter placements generated with UrbanRT-RM.
- Uncertainty-guided active querying yields more effective reconstruction improvement than non-adaptive sampling for the same additional measurement budget.
- Combining explicit geometry priors with uncertainty estimation enables more efficient use of limited sensing resources for radio map construction in complex urban settings.
Where Pith is reading between the lines
- The same geometry-plus-uncertainty pattern could be tested on related spatial reconstruction tasks such as coverage or interference mapping.
- In operational networks the approach might lower the number of physical site visits required to maintain usable radio maps.
- Gains could shrink if real building materials or foliage introduce propagation effects absent from the ray-tracing model.
Load-bearing premise
Ray-tracing simulations in the UrbanRT-RM benchmark sufficiently represent the main propagation effects such as blockages and reflections that occur in actual city environments.
What would settle it
If physical drive-test measurements collected in a real urban street grid produce reconstruction errors substantially larger than those observed on the corresponding UrbanRT-RM scenes, or if uncertainty-guided selection fails to outperform random sampling when the input data come from real sensors.
Figures








read the original abstract
Radio maps are important for environment-aware wireless communication, network planning, and radio resource optimization. However, dense radio map construction remains challenging when only a limited number of measurements are available, especially in complex urban environments with strong blockages, irregular geometry, and restricted sensing accessibility. Existing methods have explored interpolation, low-rank cartography, deep completion, and channel knowledge map (CKM) construction, but many of these methods insufficiently exploit explicit geometric priors or overlook the value of predictive uncertainty for subsequent sensing. In this paper, we study sparse gain radio map reconstruction from a geometry-aware and active sensing perspective. We first construct \textbf{UrbanRT-RM}, a controllable ray-tracing benchmark with diverse urban layouts, multiple base-station deployments, and multiple sparse sampling modes. We then propose \textbf{GeoUQ-GFNet}, a lightweight network that jointly predicts a dense gain radio map and a spatial uncertainty map from sparse measurements and structured scene priors. The predicted uncertainty is further used to guide active measurement selection under limited sensing budgets. Extensive experiments show that our proposed GeoUQ-GFNet method achieves strong and consistent reconstruction performance across different scenes and transmitter placements generated using UrbanRT-RM. Moreover, uncertainty-guided querying provides more effective reconstruction improvement than non-adaptive sampling under the same additional measurement budget. These results demonstrate the effectiveness of combining geometry-aware learning, uncertainty estimation, and benchmark-driven evaluation for sparse radio map reconstruction in complex urban environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces UrbanRT-RM, a controllable ray-tracing benchmark for urban radio maps with diverse layouts and transmitter placements, and proposes GeoUQ-GFNet, a lightweight network that jointly predicts dense gain radio maps and spatial uncertainty maps from sparse measurements plus structured scene priors. The uncertainty output is used to guide active measurement selection. Experiments on the benchmark claim strong consistent reconstruction performance across scenes and show that uncertainty-guided querying outperforms non-adaptive sampling under fixed additional measurement budgets.
Significance. If the empirical results hold under broader validation, the work would provide a useful benchmark and demonstrate the value of combining explicit geometry priors with predictive uncertainty for active sensing in radio map reconstruction. The controllable simulator-based benchmark enables reproducible comparisons, which is a strength for the field.
major comments (2)
- [Abstract and Experimental Evaluation] Abstract and Experimental Evaluation: The claim of achieving 'strong and consistent reconstruction performance ... in complex urban environments' rests exclusively on UrbanRT-RM ray-tracing simulations where geometry, blockages, and reflections are generated from the same simulator used for training data. No experiments use real measured radio maps, noisy/incomplete geometry priors (e.g., from LiDAR or maps), or sensitivity analysis to geometry mismatch, which directly undermines transferability of the reported gains and the superiority of uncertainty-guided selection.
- [Abstract] Abstract: The abstract asserts that 'uncertainty-guided querying provides more effective reconstruction improvement than non-adaptive sampling under the same additional measurement budget' yet reports no quantitative metrics, error bars, ablation tables, or statistical tests. This absence makes it impossible to evaluate the magnitude, consistency, or statistical reliability of the claimed advantage.
minor comments (2)
- [Abstract] The abstract refers to 'structured scene priors' without detailing their exact form (e.g., building footprints, material properties) or acquisition method, which affects reproducibility.
- [Method] Consider clarifying in the method section how the uncertainty map is computed and thresholded for measurement selection to avoid ambiguity in the active sensing procedure.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the value of the controllable UrbanRT-RM benchmark for reproducible evaluation. We address each major comment below and outline the revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [Abstract and Experimental Evaluation] Abstract and Experimental Evaluation: The claim of achieving 'strong and consistent reconstruction performance ... in complex urban environments' rests exclusively on UrbanRT-RM ray-tracing simulations where geometry, blockages, and reflections are generated from the same simulator used for training data. No experiments use real measured radio maps, noisy/incomplete geometry priors (e.g., from LiDAR or maps), or sensitivity analysis to geometry mismatch, which directly undermines transferability of the reported gains and the superiority of uncertainty-guided selection.
Authors: We acknowledge that the current evaluation relies entirely on the UrbanRT-RM simulator. This choice was deliberate to enable controlled, reproducible experiments with exact ground-truth dense maps across diverse layouts and transmitter placements—conditions that are difficult to obtain with real-world measurements. We agree that the lack of real measured data and explicit robustness tests to geometry mismatch limits claims about transferability. In the revised manuscript we will (1) add a dedicated limitations subsection discussing the simulation-to-real gap and the challenges of acquiring dense real radio maps, (2) report new sensitivity experiments that inject controlled noise and incompleteness into the geometry priors, and (3) quantify how these perturbations affect both reconstruction accuracy and the advantage of uncertainty-guided selection. We cannot, however, introduce new real-world measurement campaigns within the scope of this revision. revision: partial
-
Referee: [Abstract] Abstract: The abstract asserts that 'uncertainty-guided querying provides more effective reconstruction improvement than non-adaptive sampling under the same additional measurement budget' yet reports no quantitative metrics, error bars, ablation tables, or statistical tests. This absence makes it impossible to evaluate the magnitude, consistency, or statistical reliability of the claimed advantage.
Authors: We agree that the abstract would be strengthened by including concrete quantitative support. While the full experimental section already contains the relevant tables, error bars, and statistical comparisons, we will revise the abstract to report representative metrics (e.g., average NMSE reduction and consistency across scenes) together with a brief reference to the detailed results and figures. This change will allow readers to assess the magnitude and reliability of the improvement directly from the abstract. revision: yes
- Experiments on real measured radio maps (acquiring dense ground-truth radio maps in complex urban environments is resource-intensive and outside the current simulation-focused scope of the work)
Circularity Check
No significant circularity; claims rest on empirical evaluation of a proposed network on a self-generated benchmark.
full rationale
The paper constructs UrbanRT-RM as a ray-tracing benchmark and proposes GeoUQ-GFNet to predict dense radio maps plus uncertainty from sparse inputs plus geometry priors, then uses uncertainty for active sampling. All load-bearing claims are experimental performance numbers on held-out scenes from that same benchmark. No equations, loss functions, or derivations are shown that define a target quantity in terms of itself or rename a fitted parameter as a prediction. Self-citations, if present, are not load-bearing for the core reconstruction or selection logic. The derivation chain is therefore self-contained and non-circular by the stated criteria.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Ray-tracing simulations capture the dominant effects of urban blockages and reflections for gain map reconstruction.
invented entities (2)
-
UrbanRT-RM benchmark
no independent evidence
-
GeoUQ-GFNet
no independent evidence
Reference graph
Works this paper leans on
-
[1]
An I2I Inpainting Approach for Efficient Channel Knowledge Map Construction,
Z. Jin, L. You, J. Wang, X.-G. Xia, and X. Gao, “An I2I Inpainting Approach for Efficient Channel Knowledge Map Construction,”IEEE Trans. Wireless Commun., vol. 24, no. 2, pp. 1415–1429, Feb. 2025
work page 2025
-
[2]
Beamckm: A framework of channel knowledge map construction for multi-antenna systems,
H. Wang, X. Shi, H. Zhang, Y . Cao, S. Yang, J. Wang, and K. Huang, “BeamCKM: A Framework of Channel Knowledge Map Construction for Multi-Antenna Systems,”arXiv preprint arXiv:2511.18376, 2025
-
[3]
Beamckmdiff: Beam- aware channel knowledge map construction via diffusion transformer,
L. Zhao, Y . Wang, X. Wang, Z. Fei, and Y . Zeng, “BeamCKMD- iff: Beam-Aware Channel Knowledge Map Construction via Diffusion Transformer,”arXiv preprint arXiv:2601.10207, 2026
-
[4]
Beamforming- Codebook-Aware Channel Knowledge Map Construction for Multi- Antenna Systems,
H. Wang, X. Shi, H. Zhang, Y . Cao, and J. Wang, “Beamforming- Codebook-Aware Channel Knowledge Map Construction for Multi- Antenna Systems,”arXiv preprint arXiv:2505.16132, 2025
-
[5]
Channel Knowledge Map Construction via Guided Flow Matching,
Z. Huang, Y . Zeng, S. Fu, X. Xu, and H. Du, “Channel Knowledge Map Construction via Guided Flow Matching,” unpublished manuscript / preprint, 2025
work page 2025
-
[6]
Channel Knowledge Map Construction via Physics-Inspired Diffusion Model Without Prior Observations,
Y . Zhu, X. Liao, Z. Gao, L. Zeng, and Y . Zeng, “Channel Knowledge Map Construction via Physics-Inspired Diffusion Model Without Prior Observations,”arXiv preprint arXiv:2512.02757, 2025
-
[7]
Channel Knowledge Maps for 6G Wireless Networks: Construction, Applications, and Future Challenges,
X. Liu, S. Sun, M. Tao, A. Kaushik, and H. Yan, “Channel Knowledge Maps for 6G Wireless Networks: Construction, Applications, and Future Challenges,” review manuscript, 2025
work page 2025
-
[8]
Channel Knowledge Map-Aided Channel Prediction With Measurements-Based Evaluation,
X. Wang, Y . Shi, T. Wang, Y . Huang, Z. Hu, L. Chen, and Z. Jiang, “Channel Knowledge Map-Aided Channel Prediction With Measurements-Based Evaluation,”IEEE Trans. Commun., vol. 73, no. 5, pp. 3622–3636, May 2025
work page 2025
-
[9]
Z. Wu, D. Wu, S. Fu, Y . Qiu, and Y . Zeng, “CKMImageNet: A Dataset for AI-Based Channel Knowledge Map Towards Environment-Aware Communication and Sensing,”arXiv preprint arXiv:2504.09849, 2025
-
[10]
6d channel knowledge map construction via bidirectional wireless gaussian splatting,
J. Zhou, C. Hu, G. Wu, Z. Ren, H. Hu, J. Zhang, R. Zhang, and J. Xu, “6D Channel Knowledge Map Construction via Bidirectional Wireless Gaussian Splatting,”arXiv preprint arXiv:2510.26166, 2025
-
[11]
Point cloud environment-based channel knowledge map construction,
Y . Wang, W. Guo, C. Huang, G. Chen, Y . Zhang, and S. Cui, “Point Cloud Environment-Based Channel Knowledge Map Construction,” arXiv preprint arXiv:2506.21112, 2025
-
[12]
Y . Wang, C. Huang, S. Zhang, G. Chen, W. Guo, S. Lan, L. Xu, X. Cheng, X. Tang, and S. Cui, “Towards Precise Channel Knowledge Map: Exploiting Environmental Information from 2D Visuals to 3D Point Clouds,”arXiv preprint arXiv:2510.08140, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[13]
Channel Knowledge Map-Assisted Routing Scheme for Low-Altitude Economy,
J. Liu, G. Ding, Y . Xu, J. Gu, H. Wang, J. Wang, and X. Zhou, “Channel Knowledge Map-Assisted Routing Scheme for Low-Altitude Economy,” IEEE Trans. V eh. Technol., early access, 2025
work page 2025
-
[14]
Deep Learning-Based CKM Construction with Image Super-Resolution,
S. Wang, X. Xu, and Y . Zeng, “Deep Learning-Based CKM Construction with Image Super-Resolution,”arXiv preprint arXiv:2411.08887, 2025
-
[15]
Generating CKM Using Others’ Data: Cross-AP CKM Inference with Deep Learning,
Z. Dai, D. Wu, X. Xu, and Y . Zeng, “Generating CKM Using Others’ Data: Cross-AP CKM Inference with Deep Learning,”IEEE Trans. V eh. Technol., early access, 2025
work page 2025
-
[16]
Generative CKM Construction using Partially Observed Data with Diffusion Model,
S. Fu, Z. Wu, D. Wu, and Y . Zeng, “Generative CKM Construction using Partially Observed Data with Diffusion Model,” inProc. IEEE VTC2025-Spring, 2025
work page 2025
-
[17]
X. Shi, H. Wang, Y . Cao, H. Zhang, S. Yang, and J. Wang, “Leveraging Channel Knowledge Map for Multi-User Hierarchical Beam Training Under Position Uncertainty,”arXiv preprint arXiv:2511.22902, 2025
-
[18]
AIGC-Based Radio Map Con- struction for Channel Estimation in Low-Altitude Economy,
B. Yang, W. Zhang, and S. Zhang, “AIGC-Based Radio Map Con- struction for Channel Estimation in Low-Altitude Economy,” inProc. IEEE/CIC Int. Conf. Commun. China Workshops, 2025
work page 2025
-
[19]
Deep Learning Based Channel Estimation for Deep-Space Communications,
L. Cai, G. Xu, Q. Zhang, Z. Song, and W. Zhang, “Deep Learning Based Channel Estimation for Deep-Space Communications,”IEEE Trans. V eh. Technol., vol. 74, no. 12, pp. 19743–19755, Dec. 2025. 13
work page 2025
-
[20]
R. Sun, N. Cheng, C. Li, W. Quan, H. Zhou, Y . Wang, W. Zhang, and X. Shen, “A Comprehensive Survey of Knowledge-Driven Deep Learning for Intelligent Wireless Network Optimization in 6G,”IEEE Commun. Surveys Tuts., vol. 28, pp. 1099–1135, 2026
work page 2026
-
[21]
Radio Map-Based Beamforming Assisted With Reduced Pilots,
B. Yang, W. Wang, and W. Zhang, “Radio Map-Based Beamforming Assisted With Reduced Pilots,”IEEE Trans. Wireless Commun., vol. 24, no. 10, pp. 8878–8891, Oct. 2025
work page 2025
-
[22]
Performance Anal- ysis of LEO Satellite-Assisted Deep Space Communication Systems,
M. Gao, G. Xu, Z. Song, Q. Zhang, and W. Zhang, “Performance Anal- ysis of LEO Satellite-Assisted Deep Space Communication Systems,” IEEE Trans. Aerosp. Electron. Syst., vol. 61, no. 5, pp. 12628–12648, Oct. 2025
work page 2025
-
[23]
Automatic Radio Map Adaptation for Indoor Localization Using Smartphones,
C. Wu, Z. Yang, and C. Xiao, “Automatic Radio Map Adaptation for Indoor Localization Using Smartphones,”IEEE Trans. Mobile Comput., vol. 17, no. 3, pp. 517–531, Mar. 2018
work page 2018
-
[24]
Bayesian Active Learning for Sample Efficient 5G Radio Map Reconstruction,
K. D. Polyzos, A. Sadeghi, W. Ye, S. Sleder, K. Houssou, J. Calder, Z.-L. Zhang, and G. B. Giannakis, “Bayesian Active Learning for Sample Efficient 5G Radio Map Reconstruction,”IEEE Trans. Wireless Commun., vol. 23, no. 12, pp. 19382–19396, Dec. 2024
work page 2024
-
[25]
D. Romero, D. Lee, and G. B. Giannakis, “Blind Radio Tomography,” IEEE Trans. Signal Process., vol. 66, no. 8, pp. 2055–2069, Apr. 2018
work page 2055
-
[26]
A Data-Driven Transfer Learning Method for Indoor Radio Map Estimation,
R. K. Jaiswal, M. Elnourani, S. Deshmukh, and B. Beferull-Lozano, “A Data-Driven Transfer Learning Method for Indoor Radio Map Estimation,”IEEE Trans. V eh. Technol., vol. 75, no. 3, pp. 4261–4277, Mar. 2026
work page 2026
-
[27]
Accuracy vs. Resolution in Radio Tomography,
R. K. Martin, A. Folkerts, and T. Heinl, “Accuracy vs. Resolution in Radio Tomography,”IEEE Trans. Signal Process., vol. 62, no. 10, pp. 2480–2490, May 2014
work page 2014
-
[28]
Adaptive Bayesian Radio Tomography,
D. Lee, D. Berberidis, and G. B. Giannakis, “Adaptive Bayesian Radio Tomography,”IEEE Trans. Signal Process., vol. 67, no. 8, pp. 1964– 1979, Apr. 2019
work page 1964
-
[29]
Aerial Base Station Placement via Propagation Radio Maps,
D. Romero, P. Q. Viet, and R. Shrestha, “Aerial Base Station Placement via Propagation Radio Maps,”IEEE Trans. Commun., vol. 72, no. 9, pp. 5349–5364, Sep. 2024
work page 2024
-
[30]
Environment-Aware Hybrid Beamforming by Leveraging Channel Knowledge Map,
D. Wu, Y . Zeng, S. Jin, and R. Zhang, “Environment-Aware Hybrid Beamforming by Leveraging Channel Knowledge Map,”IEEE Trans. Wireless Commun., vol. 23, no. 5, pp. 4990–5005, May 2024
work page 2024
-
[31]
Generative AI on SpectrumNet: An Open Benchmark of Multiband 3- D Radio Maps,
S. Zhang, S. Jiang, W. Lin, Z. Fang, K. Liu, H. Zhang, and K. Chen, “Generative AI on SpectrumNet: An Open Benchmark of Multiband 3- D Radio Maps,”IEEE Trans. Cogn. Commun. Netw., vol. 11, no. 2, pp. 886–899, Apr. 2025
work page 2025
-
[32]
High-Efficiency Urban 3D Radio Map Estimation Based on Sparse Measurements,
X. Chen, X. Zhong, Z. Zhang, L. Dai, and S. Zhou, “High-Efficiency Urban 3D Radio Map Estimation Based on Sparse Measurements,”IEEE Trans. V eh. Technol., vol. 74, no. 10, pp. 16488–16493, Oct. 2025
work page 2025
-
[33]
How Much Data Is Needed for Channel Knowledge Map Construction?,
X. Xu and Y . Zeng, “How Much Data Is Needed for Channel Knowledge Map Construction?,”IEEE Trans. Wireless Commun., vol. 23, no. 10, pp. 13011–13021, Oct. 2024
work page 2024
-
[34]
Channel Gain Cartography for Cognitive Radios Leveraging Low Rank and Sparsity,
D. Lee, S.-J. Kim, and G. B. Giannakis, “Channel Gain Cartography for Cognitive Radios Leveraging Low Rank and Sparsity,”IEEE Trans. Wireless Commun., vol. 16, no. 9, pp. 5953–5966, Sep. 2017
work page 2017
-
[35]
Deep Completion Autoencoders for Radio Map Estimation,
Y . Teganya and D. Romero, “Deep Completion Autoencoders for Radio Map Estimation,”IEEE Trans. Wireless Commun., vol. 21, no. 3, pp. 1710–1724, Mar. 2022
work page 2022
-
[36]
Deep Spectrum Cartography: Completing Radio Map Tensors Using Learned Neural Models,
S. Shrestha, X. Fu, and M. Hong, “Deep Spectrum Cartography: Completing Radio Map Tensors Using Learned Neural Models,”IEEE Trans. Signal Process., vol. 70, pp. 1170–1185, 2022
work page 2022
-
[37]
Deep-Learning-Based Radio Map Recon- struction for V2X Communications,
S. Roger, M. Brambilla, B. Camajori Tedeschini, C. Botella-Mascarell, M. Cobos, and M. Nicoli, “Deep-Learning-Based Radio Map Recon- struction for V2X Communications,”IEEE Trans. V eh. Technol., vol. 73, no. 3, pp. 3863–3876, Mar. 2024
work page 2024
-
[38]
Distributed Spectrum Sensing for Cognitive Radio Networks by Exploiting Sparsity,
J. A. Bazerque and G. B. Giannakis, “Distributed Spectrum Sensing for Cognitive Radio Networks by Exploiting Sparsity,”IEEE Trans. Signal Process., vol. 58, no. 3, pp. 1847–1862, Mar. 2010
work page 2010
-
[39]
X. Chen, J. Wang, and Q. Huang, “Dynamic Spectrum Cartography: Reconstructing Spatial-Spectral-Temporal Radio Frequency Map via Tensor Completion,”IEEE Trans. Signal Process., vol. 73, pp. 1184– 1199, 2025
work page 2025
-
[40]
Paying Deformable Attention to Sparse Spatial Observations for Deep Radio Map Estimation,
K. Liu, C. Qiu, K. Chen, Q. Zheng, L. Song, and Y . Wang, “Paying Deformable Attention to Sparse Spatial Observations for Deep Radio Map Estimation,”IEEE Trans. Cogn. Commun. Netw., vol. 12, pp. 1436– 1450, 2026
work page 2026
-
[41]
Radio Map Reconstruction Based on Deep Denoising Regularization for UA V Communications,
H. Zhao, Q. Hao, Y . He, H. Huang, H. Sari, F. Adachi, and G. Gui, “Radio Map Reconstruction Based on Deep Denoising Regularization for UA V Communications,”IEEE Trans. V eh. Technol., vol. 74, no. 6, pp. 9876–9881, Jun. 2025
work page 2025
-
[42]
Radio Map-Assisted Approach for Interference- Aware Predictive UA V Communications,
B. Li and J. Chen, “Radio Map-Assisted Approach for Interference- Aware Predictive UA V Communications,”IEEE Trans. Wireless Com- mun., vol. 23, no. 11, pp. 16725–16741, Nov. 2024
work page 2024
-
[43]
RadioDiff: An Effective Generative Diffusion Model for Sampling-Free Dynamic Radio Map Construction,
X. Wang, K. Tao, N. Cheng, Z. Yin, Z. Li, Y . Zhang, and X. Shen, “RadioDiff: An Effective Generative Diffusion Model for Sampling-Free Dynamic Radio Map Construction,”IEEE Trans. Cogn. Commun. Netw., vol. 11, no. 2, pp. 738–750, Apr. 2025
work page 2025
-
[44]
Intelligent Reflecting Surface Enhanced Indoor Robot Path Planning: A Radio Map-Based Approach,
X. Mu, Y . Liu, L. Guo, J. Lin, and R. Schober, “Intelligent Reflecting Surface Enhanced Indoor Robot Path Planning: A Radio Map-Based Approach,”IEEE Trans. Wireless Commun., vol. 20, no. 7, pp. 4732– 4747, Jul. 2021
work page 2021
-
[45]
KAN-Based Interpretable Radio Map Prediction Framework With Symbolic Data Fusion,
C. Liao, X. Ge, M. He, Y . Zheng, and S. Liu, “KAN-Based Interpretable Radio Map Prediction Framework With Symbolic Data Fusion,”IEEE Trans. Cogn. Commun. Netw., vol. 12, pp. 1788–1802, 2026
work page 2026
-
[46]
Kernel-Based Adaptive Online Reconstruction of Coverage Maps With Side Information,
M. Kasparick, R. L. G. Cavalcante, S. Valentin, S. Stanczak, and M. Yukawa, “Kernel-Based Adaptive Online Reconstruction of Coverage Maps With Side Information,”IEEE Trans. V eh. Technol., vol. 65, no. 7, pp. 5461–5473, Jul. 2016
work page 2016
-
[47]
Learn- ing Power Spectrum Maps From Quantized Power Measurements,
D. Romero, S.-J. Kim, G. B. Giannakis, and R. Lopez-Valcarce, “Learn- ing Power Spectrum Maps From Quantized Power Measurements,”IEEE Trans. Signal Process., vol. 65, no. 10, pp. 2547–2560, May 2017
work page 2017
-
[48]
Leveraging Transfer Learning for Radio Map Estimation via Mixture of Experts,
R. K. Jaiswal, M. Elnourani, S. Deshmukh, and B. Beferull-Lozano, “Leveraging Transfer Learning for Radio Map Estimation via Mixture of Experts,”IEEE Trans. Cogn. Commun. Netw., vol. 12, pp. 846–863, 2026
work page 2026
-
[49]
Location-Free Spectrum Cartography,
Y . Teganya, D. Romero, L. M. Lopez Ramos, and B. Beferull-Lozano, “Location-Free Spectrum Cartography,”IEEE Trans. Signal Process., vol. 67, no. 15, pp. 4013–4028, Aug. 2019
work page 2019
-
[50]
Y . Zeng, X. Xu, S. Jin, and R. Zhang, “Simultaneous Navigation and Radio Mapping for Cellular-Connected UA V With Deep Reinforcement Learning,”IEEE Trans. Wireless Commun., vol. 20, no. 7, pp. 4205– 4220, Jul. 2021
work page 2021
-
[51]
Space-Frequency- Interpolated Radio Map,
K. Sato, K. Suto, K. Inage, K. Adachi, and T. Fujii, “Space-Frequency- Interpolated Radio Map,”IEEE Trans. V eh. Technol., vol. 70, no. 1, pp. 714–725, Jan. 2021
work page 2021
-
[52]
Spectrum Surveying: Active Radio Map Estimation With Autonomous UA Vs,
R. Shrestha, D. Romero, and S. P. Chepuri, “Spectrum Surveying: Active Radio Map Estimation With Autonomous UA Vs,”IEEE Trans. Wireless Commun., vol. 22, no. 1, pp. 627–640, Jan. 2023
work page 2023
-
[53]
Theoretical Analysis of the Radio Map Estimation Problem,
D. Romero, T. N. Ha, R. Shrestha, and M. Franceschetti, “Theoretical Analysis of the Radio Map Estimation Problem,”IEEE Trans. Wireless Commun., vol. 23, no. 10, pp. 13722–13737, Oct. 2024
work page 2024
-
[54]
X. Li, S. Zhang, H. Li, X. Li, L. Xu, H. Xu, H. Mei, G. Zhu, N. Qi, and M. Xiao, “RadioGAT: A Joint Model-Based and Data- Driven Framework for Multi-Band Radiomap Reconstruction via Graph Attention Networks,”IEEE Trans. Wireless Commun., vol. 23, no. 11, pp. 17777–17792, Nov. 2024
work page 2024
-
[55]
Radiomap Inpainting for Restricted Areas Based on Propagation Priority and Depth Map,
S. Zhang, T. Yu, B. Choi, F. Ouyang, and Z. Ding, “Radiomap Inpainting for Restricted Areas Based on Propagation Priority and Depth Map,” IEEE Trans. Wireless Commun., vol. 23, no. 8, pp. 9330–9344, Aug. 2024
work page 2024
-
[56]
RadioUNet: Fast Radio Map Estimation With Convolutional Neural Networks,
R. Levie, C. Yapar, G. Kutyniok, and G. Caire, “RadioUNet: Fast Radio Map Estimation With Convolutional Neural Networks,”IEEE Trans. Wireless Commun., vol. 20, no. 6, pp. 4001–4015, Jun. 2021
work page 2021
-
[57]
See-Through Walls: Motion Tracking Using Variance-Based Radio Tomography Networks,
J. Wilson and N. Patwari, “See-Through Walls: Motion Tracking Using Variance-Based Radio Tomography Networks,”IEEE Trans. Mobile Comput., vol. 10, no. 5, pp. 612–621, May 2011
work page 2011
-
[58]
6G Internet of Things: A Comprehensive Survey,
D. C. Nguyen, M. Ding, P. N. Pathirana, A. Seneviratne, J. Li, D. Niyato, O. Dobre, and H. V . Poor, “6G Internet of Things: A Comprehensive Survey,”IEEE Internet Things J., vol. 9, no. 1, pp. 359–383, Jan. 2022
work page 2022
-
[59]
GhostNet: More Features From Cheap Operations,
K. Han, Y . Wang, Q. Tian, J. Guo, C. Xu, and C. Xu, “GhostNet: More Features From Cheap Operations,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit., pp. 1580–1589, 2020
work page 2020
-
[60]
KAN: Kolmogorov–Arnold Networks,
Z. Liu, Y . Wang, S. Vaidya, F. Ruehle, J. Halverson, M. Solja ˇci´c, T. Y . Hou, and M. Tegmark, “KAN: Kolmogorov–Arnold Networks,” inProc. Int. Conf. Learn. Represent., 2025
work page 2025
-
[61]
Optimizing Space-Air-Ground Integrated Networks by Artificial Intelligence,
N. Kato, Z. M. Fadlullah, F. Tang, B. Mao, S. Tani, A. Okamura, and J. Liu, “Optimizing Space-Air-Ground Integrated Networks by Artificial Intelligence,”IEEE Wireless Commun., vol. 26, no. 4, pp. 140–147, Aug. 2019
work page 2019
-
[62]
Space-Air-Ground Integrated Network: A Survey,
J. Liu, Y . Shi, Z. M. Fadlullah, and N. Kato, “Space-Air-Ground Integrated Network: A Survey,”IEEE Commun. Surveys Tuts., vol. 20, no. 4, pp. 2714–2741, 2018
work page 2018
-
[63]
A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems,
W. Saad, M. Bennis, and M. Chen, “A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems,” IEEE Netw., vol. 34, no. 3, pp. 134–142, May 2020
work page 2020
-
[64]
Sionna RT: Differentiable Ray Tracing for Radio Propagation Modeling,
J. Hoydis, F. A ¨ıt Aoudia, S. Cammerer, M. Nimier-David, N. Binder, G. Marcus, and A. Keller, “Sionna RT: Differentiable Ray Tracing for Radio Propagation Modeling,” inProc. IEEE Globecom Workshops (GC Wkshps), pp. 317–321, 2023. 14
work page 2023
-
[65]
Z. Zeng, K. Wang, Z. Zhang, and Y . Xiu, “GAC-KAN: An Ultra- Lightweight GNSS Interference Classifier for GenAI-Powered Con- sumer Edge Devices,”arXiv preprint arXiv:2602.11186, 2026
-
[66]
Z. Zeng, Y . Zhao, K. Wang, D. Niyato, Y . Xiu, L. Chen, Z. Zhang, and N. Wei, “PhyG-MoE: A Physics-Guided Mixture-of-Experts Framework for Energy-Efficient GNSS Interference Recognition,”arXiv preprint arXiv:2601.12798, 2026
-
[67]
Z. Zeng, Y . Zhao, K. Wang, D. Niyato, H. Shu, J. Zhao, Y . Huang, Y . Xiu, Z. Zhang, and N. Wei, “SKANet: A Cognitive Dual-Stream Framework with Adaptive Modality Fusion for Robust Compound GNSS Interference Classification,”arXiv preprint arXiv:2601.12791, 2026
-
[68]
Z. Zeng, H. Shu, K. Wang, L. Chen, A. Hussain, Y . Huang, J. Zhao, Y . Xiu, and Z. Zhang, “JSR-GFNet: Jamming-to-Signal Ratio-Aware Dynamic Gating for Interference Classification in future Cognitive Global Navigation Satellite Systems,”arXiv preprint arXiv:2602.00042, 2026
-
[69]
Robust Optimization for Movable Antenna-Aided Cell- Free ISAC With Time Synchronization Errors,
Y . Xiuet al., “Robust Optimization for Movable Antenna-Aided Cell- Free ISAC With Time Synchronization Errors,”IEEE Trans. Wireless Commun., vol. 25, pp. 10082–10097, 2026
work page 2026
-
[70]
Y . Xiuet al., “Power Source Allocation for RIS-aided Integrating Sensing, Communication, and Power Transfer Communication Systems Based on NOMA,”IEEE Trans. Mob. Comput., pp. 1–14, 2026
work page 2026
-
[71]
Movable Antenna-Aided Cooperative ISAC Network with Time Synchronization Error and Imperfect CSI,
Y . Xiuet al., “Movable Antenna-Aided Cooperative ISAC Network with Time Synchronization Error and Imperfect CSI,”IEEE Trans. Commun., p. 1, 2025
work page 2025
-
[72]
Latency Minimization for Movable Relay-Aided D2D- MEC Communication Systems,
Y . Xiuet al., “Latency Minimization for Movable Relay-Aided D2D- MEC Communication Systems,”IEEE Trans. Mob. Comput., vol. 25, no. 1, pp. 533–549, 2026
work page 2026
-
[73]
Secure Enhancement for RIS-Aided UA V with ISAC: Robust Design and Resource Allocation,
Y . Xiu, W. Lyu, P. L. Yeoh, Y . Ai, and N. Wei, “Secure Enhancement for RIS-Aided UA V with ISAC: Robust Design and Resource Allocation,” IEEE Trans. V eh. Technol., pp. 1–16, 2025
work page 2025
-
[74]
Crosstalk-Resilient Beamforming for Movable Antenna Enabled Integrated Sensing and Communication,
Z. Zhang, Y . Xiu, Z. Dong, J. Yin, M. J. Khabbaz, C. Assi, and N. Wei, “Crosstalk-Resilient Beamforming for Movable Antenna Enabled Integrated Sensing and Communication,”IEEE Wireless Commun. Lett., p. 1, 2026
work page 2026
-
[75]
Distortion- Aware Hybrid Beamforming for Integrated Sensing and Communica- tion,
Z. Zhang, Y . Xiu, P. L. Yeoh, G. Liu, Z. Wu, and N. Wei, “Distortion- Aware Hybrid Beamforming for Integrated Sensing and Communica- tion,”IEEE Commun. Lett., vol. 30, pp. 682–686, 2026
work page 2026
-
[76]
Movable An- tenna Enhanced Secure Simultaneous Wireless Information and Power Transfer,
X. Dong, W. Lyu, R. Yang, Y . Xiu, W. Mei, and Z. Zhang, “Movable An- tenna Enhanced Secure Simultaneous Wireless Information and Power Transfer,”IEEE Commun. Lett., vol. 29, no. 10, pp. 2356–2360, 2025
work page 2025
-
[77]
Y . Xiuet al., “Robust Beamforming Design for Near-Field DMA- NOMA mmWave Communications With Imperfect Position Informa- tion,”IEEE Trans. Wireless Commun., vol. 24, no. 2, pp. 1678–1692, 2025
work page 2025
-
[78]
Flexible WMMSE Beamforming for MU-MIMO Mov- able Antenna Communications,
S. Yanget al., “Flexible WMMSE Beamforming for MU-MIMO Mov- able Antenna Communications,”IEEE Trans. Signal Process., vol. 73, pp. 4479–4491, 2025
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.