Recognition: 2 theorem links
· Lean TheoremLLM-Generated Fault Scenarios for Evaluating Perception-Driven Lane Following in Autonomous Edge Systems
Pith reviewed 2026-05-13 22:54 UTC · model grok-4.3
The pith
A decoupled framework uses LLMs and diffusion models to generate fault scenarios that expose up to 99 percent worse performance in lane-following models on edge devices.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
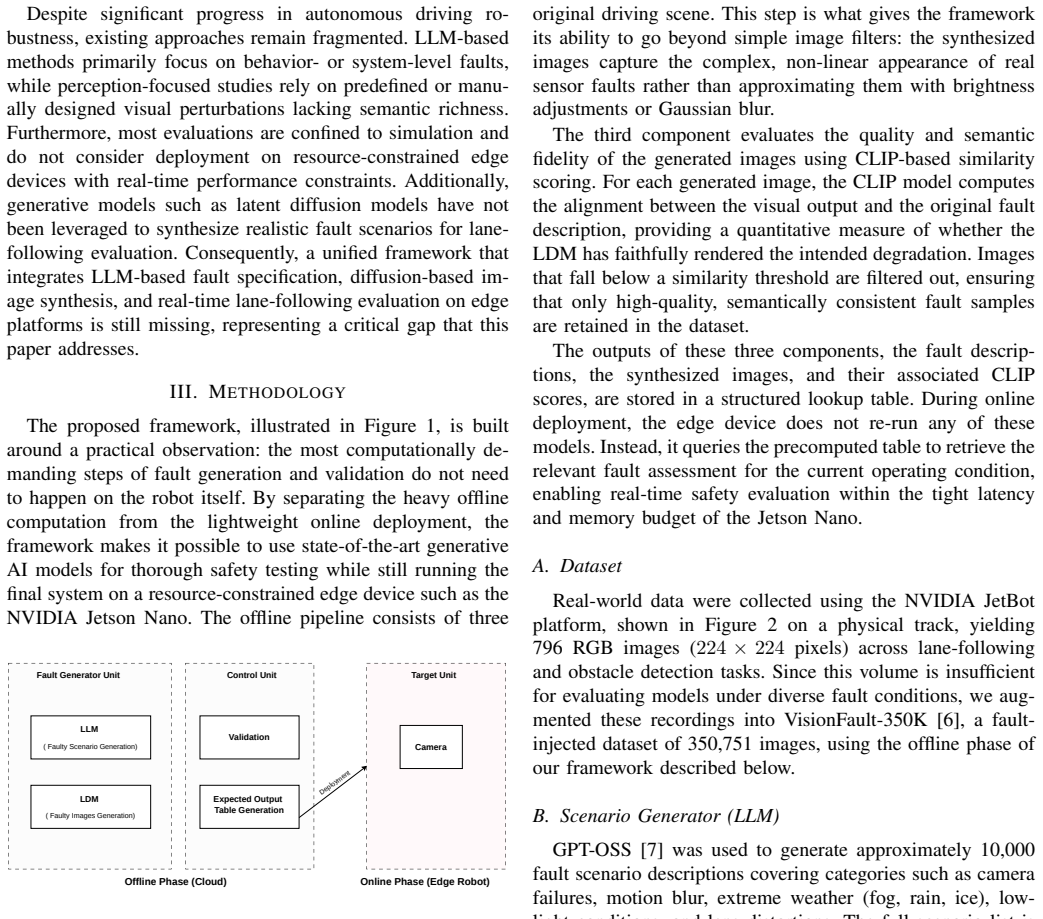
We introduce a decoupled offline-online fault injection framework. This architecture separates the validation process into two distinct phases: a computationally intensive Offline Phase and a lightweight Online Phase. In the offline phase, we employ Large Language Models (LLMs) to semantically generate structured fault scenarios and Latent Diffusion Models (LDMs) to synthesize high-fidelity sensor degradations. These complex fault dynamics are distilled into a pre-computed lookup table, enabling the edge device to perform real-time fault-aware inference without running heavy AI models locally. We extensively validated this framework on a ResNet18 lane-following model across 460 fault scénarï
What carries the argument
Decoupled offline-online fault injection framework that converts LLM-generated scenarios and LDM-synthesized degradations into a pre-computed lookup table for real-time edge inference.
If this is right
- Evaluation on clean data alone overestimates reliability of perception models for autonomous edge deployment.
- Edge hardware can perform fault-aware inference at runtime using only a precomputed lookup table.
- Systematic generation of diverse sensor degradations can surface robustness gaps absent from static datasets.
- Metrics such as RMSE and within-0.10 localization accuracy must be reported under controlled fault conditions to reflect deployment risk.
Where Pith is reading between the lines
- The same offline generation step could be applied to other perception tasks such as object detection or depth estimation.
- Direct comparison of the generated degradations against real sensor recordings from vehicles would test how closely the synthetic faults match physical conditions.
- The lookup-table approach might be combined with lightweight online adaptation so the model can adjust predictions once a fault type is detected.
Load-bearing premise
The assumption that LLM-generated fault scenarios and LDM-synthesized degradations are representative of real-world environmental hazards and sensor failures.
What would settle it
Run the identical ResNet18 lane-following model on a physical vehicle in actual fog and measure whether localization accuracy falls to 31 percent and RMSE rises by 99 percent relative to clear conditions.
Figures






read the original abstract
Deploying autonomous vision systems on edge devices faces a critical challenge: resource constraints prevent real-time and predictable execution of comprehensive safety tests. Existing validation methods depend on static datasets or manual fault injection, failing to capture the diverse environmental hazards encountered in real-world deployment. To address this, we introduce a decoupled offline-online fault injection framework. This architecture separates the validation process into two distinct phases: a computationally intensive Offline Phase and a lightweight Online Phase. In the offline phase, we employ Large Language Models (LLMs) to semantically generate structured fault scenarios and Latent Diffusion Models (LDMs) to synthesize high-fidelity sensor degradations. These complex fault dynamics are distilled into a pre-computed lookup table, enabling the edge device to perform real-time fault-aware inference without running heavy AI models locally. We extensively validated this framework on a ResNet18 lane-following model across 460 fault scenarios. Results show that while the model achieves a baseline R^2 of approximately 0.85 on clean data, our generated faults expose significant robustness degradation, with RMSE increasing by up to 99% and within-0.10 localization accuracy dropping to as low as 31.0% under fog conditions, demonstrating the inadequacy of normal-data evaluation for real-world edge AI deployment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a decoupled offline-online fault injection framework for evaluating lane-following perception models on edge devices. LLMs generate structured fault scenarios and LDMs synthesize sensor degradations in an offline phase; these are distilled into a lookup table that enables lightweight, real-time fault-aware inference online. The framework is evaluated on a ResNet18 lane-following model across 460 generated scenarios, reporting a clean-data baseline R² of approximately 0.85 that degrades under faults (RMSE increases up to 99%, within-0.10 localization accuracy falls to 31% under fog), arguing that standard clean-data evaluation is inadequate for real-world edge deployment.
Significance. If the synthetic faults are shown to be representative, the work would usefully demonstrate the limitations of clean-data testing for safety-critical autonomous perception and supply a practical architecture that offloads heavy computation while preserving real-time capability on constrained hardware. The distillation step into a lookup table is a concrete engineering contribution that directly addresses edge deployment constraints.
major comments (2)
- [Abstract and Experiments section] Abstract and Experiments section: The central claim that normal-data evaluation is inadequate for real-world edge deployment rests on the representativeness of the LLM-generated scenarios and LDM degradations, yet no quantitative validation (FID, perceptual similarity scores, or correlation with real sensor/failure logs) is supplied to link the 460 synthetic cases to physical distributions; this assumption is load-bearing for translating the reported 99% RMSE rise and 31% accuracy drop into deployment-risk conclusions.
- [Experiments section] Experiments section: The headline metrics (R² ≈ 0.85 clean, up to 99% RMSE increase, 31% accuracy under fog) are reported across 460 scenarios without error bars, variance estimates, or explicit criteria for scenario selection and fault-parameter ranges, making it impossible to judge whether the observed degradations are statistically robust or sensitive to particular generation choices.
minor comments (1)
- [Methods] The construction and lookup-table access protocol for the distilled fault parameters should be given a formal algorithmic description or pseudocode to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which helps clarify the need for stronger justification of our synthetic fault scenarios and improved statistical reporting. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract and Experiments section] Abstract and Experiments section: The central claim that normal-data evaluation is inadequate for real-world edge deployment rests on the representativeness of the LLM-generated scenarios and LDM degradations, yet no quantitative validation (FID, perceptual similarity scores, or correlation with real sensor/failure logs) is supplied to link the 460 synthetic cases to physical distributions; this assumption is load-bearing for translating the reported 99% RMSE rise and 31% accuracy drop into deployment-risk conclusions.
Authors: We agree that the absence of quantitative metrics such as FID scores or explicit correlations with real sensor logs limits the strength of claims about real-world representativeness. The current work focuses on generating diverse, semantically plausible faults via LLMs and LDMs to demonstrate potential robustness gaps rather than claiming exact distributional match. In the revision we will add a dedicated subsection in Experiments detailing the LLM prompt templates, LDM conditioning parameters, and qualitative visual comparisons of synthesized degradations. We will also include a limitations paragraph noting that full correlation with proprietary real-world failure logs is outside the present scope and would require industry collaboration. revision: partial
-
Referee: [Experiments section] Experiments section: The headline metrics (R² ≈ 0.85 clean, up to 99% RMSE increase, 31% accuracy under fog) are reported across 460 scenarios without error bars, variance estimates, or explicit criteria for scenario selection and fault-parameter ranges, making it impossible to judge whether the observed degradations are statistically robust or sensitive to particular generation choices.
Authors: We accept this criticism. The revised manuscript will expand the Experiments section to report error bars (standard deviation across scenario subsets) and bootstrap-based variance estimates for the key metrics. We will also explicitly state the scenario selection criteria (balanced coverage of weather, lighting, and fault severity categories) and the numerical ranges used for fault parameters in the LLM generation prompts. These additions will be accompanied by a table summarizing the parameter distributions. revision: yes
- Direct quantitative validation (FID scores or statistical correlation) against real sensor/failure logs, as no such public or accessible datasets were available to the authors.
Circularity Check
No significant circularity; evaluation reports direct metrics on generated scenarios
full rationale
The paper describes an empirical framework that uses LLMs to generate fault scenarios and LDMs to synthesize degradations, distills them into a lookup table, and measures performance on an external ResNet18 lane-following model across 460 cases. Reported quantities (baseline R^2 ≈ 0.85 on clean data, up to 99% RMSE increase, 31% accuracy under fog) are computed directly from model outputs on the synthetic inputs. No equations, fitted parameters, or self-citations reduce these results to the generation process by construction. The central claim rests on the observed degradation numbers rather than any definitional or self-referential loop.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption LLM-generated fault scenarios and LDM-synthesized degradations accurately represent the distribution of real-world environmental hazards and sensor failures.
Lean theorems connected to this paper
-
IndisputableMonolith/CostJcost_pos_of_ne_one unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
ResNet18 lane-following model... R^2 ≈0.85 on clean data... RMSE increasing by up to 99%... within-0.10 localization accuracy dropping to as low as 31.0% under fog
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Y . Mei, T. Nie, J. Sun, and Y . Tian, “Llm-attacker: Enhancing closed- loop adversarial scenario generation for autonomous driving with large language models,”IEEE Transactions on Intelligent Transportation Sys- tems, vol. 26, no. 10, pp. 15 068–15 076, 2025
work page 2025
-
[2]
G. You, S. Tang, J. Zhou, H. Liu, J. Jiang, Y .-F. Li, and Y . Xue, “Loft: An llm-enhanced multi-objective search framework for fault injection testing of autonomous driving systems,” in2025 IEEE 36th International Symposium on Software Reliability Engineering (ISSRE), 2025, pp. 142– 153
work page 2025
-
[3]
Lanevil: Benchmarking the robustness of lane detection to environmental illusions,
T. Zhang, L. Wang, H. Li, Y . Xiao, S. Liang, A. Liu, X. Liu, and D. Tao, “Lanevil: Benchmarking the robustness of lane detection to environmental illusions,” inProceedings of the 32nd ACM International Conference on Multimedia, ser. MM ’24. New York, NY , USA: Association for Computing Machinery, 2024, p. 5403–5412. [Online]. Available: https://doi.org/1...
-
[4]
Deeptest: automated testing of deep-neural-network-driven autonomous cars,
Y . Tian, K. Pei, S. Jana, and B. Ray, “Deeptest: automated testing of deep-neural-network-driven autonomous cars,” inProceedings of the 40th International Conference on Software Engineering, ser. ICSE ’18. New York, NY , USA: Association for Computing Machinery, 2018, p. 303–314. [Online]. Available: https://doi.org/10.1145/3180155.3180220
-
[5]
Robustness analysis of lane keeping system for autonomous ground vehicle,
S. Ahmed and W. Rahiman, “Robustness analysis of lane keeping system for autonomous ground vehicle,” in2017 IEEE International Conference on Imaging, Vision and Pattern Recognition (icIVPR), 2017, pp. 1–5
work page 2017
-
[6]
Visionfault -350k: A large -scale fault injection dataset for robotic vision systems,
M. Azarafza and F. Pasandideh, “Visionfault-350k: A large-scale fault injection dataset for robotic vision systems,” Feb. 2026. [Online]. Available: https://doi.org/10.5281/zenodo.18695332
-
[7]
gpt-oss-120b & gpt-oss-20b Model Card
OpenAI, “gpt-oss-120b and gpt-oss-20b Model Card,” arXiv preprint arXiv:2508.10925, 2025. [Online]. Available: https://arxiv.org/abs/2508. 10925
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[8]
High-Resolution Image Synthesis with Latent Diffusion Models
R. Rombach, A. Blattmann, D. Lorenz, P. Esser, and B. Ommer, “High-Resolution Image Synthesis with Latent Diffusion Models,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022, pp. 10 684–10 695. [Online]. Available: https://arxiv.org/abs/2112.10752
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[9]
Learning Transferable Visual Models From Natural Language Supervision
A. Radford, J. W. Kim, C. Hallacy, A. Ramesh, G. Goh, and I. Sutskever, “Learning Transferable Visual Models from Natural Language Supervision,” inProceedings of the International Conference on Machine Learning (ICML), 2021, pp. 8748–8763. [Online]. Available: https://arxiv.org/abs/2103.00020
work page internal anchor Pith review Pith/arXiv arXiv 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.