Recognition: unknown
PointSplat: Efficient Geometry-Driven Pruning and Transformer Refinement for 3D Gaussian Splatting
Pith reviewed 2026-05-10 17:12 UTC · model grok-4.3
The pith
PointSplat ranks and removes 3D Gaussians using only their intrinsic position, scale, and opacity values, then refines the survivors with a dual-branch transformer to preserve rendering quality.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
PointSplat is a prune-and-refine pipeline in which Gaussians are ranked for removal solely by their 3D attributes, after which a dual-branch transformer encoder separates geometric and appearance features, re-weights them to avoid imbalance, and produces a compact yet high-fidelity model that requires no further per-scene optimization.
What carries the argument
Geometry-driven pruning that ranks Gaussians by intrinsic 3D attributes, paired with a dual-branch encoder that separates and re-weights geometric versus appearance features.
If this is right
- Memory and storage requirements drop because fewer Gaussians are retained after pruning.
- The pruning stage no longer depends on rendering 2D images to compute importance scores.
- No per-scene fine-tuning is required after the initial prune-and-refine step.
- The same pipeline works across different sparsity levels on indoor datasets such as ScanNet++ and Replica.
- Rendering speed improves because the final model contains fewer primitives while visual quality stays competitive.
Where Pith is reading between the lines
- The separation of geometry and appearance branches could be adapted to other explicit 3D representations that mix structural and photometric attributes.
- Because pruning no longer needs 2D images, the method might scale more easily to very large or dynamic scenes where rendering reference views becomes costly.
- The absence of per-scene optimization suggests the approach could support on-the-fly compression in streaming or mobile applications.
- If the 3D ranking proves robust, similar intrinsic-attribute pruning might be tested on outdoor or object-centric Gaussian models.
Load-bearing premise
Gaussians can be reliably ordered for deletion using only their 3D position, scale, and opacity without needing any 2D image-based importance scores.
What would settle it
A side-by-side comparison on the same scenes in which PointSplat's 3D-only pruned models produce visibly lower PSNR or higher perceptual error than an otherwise identical pipeline that uses 2D importance scores for pruning.
Figures



read the original abstract
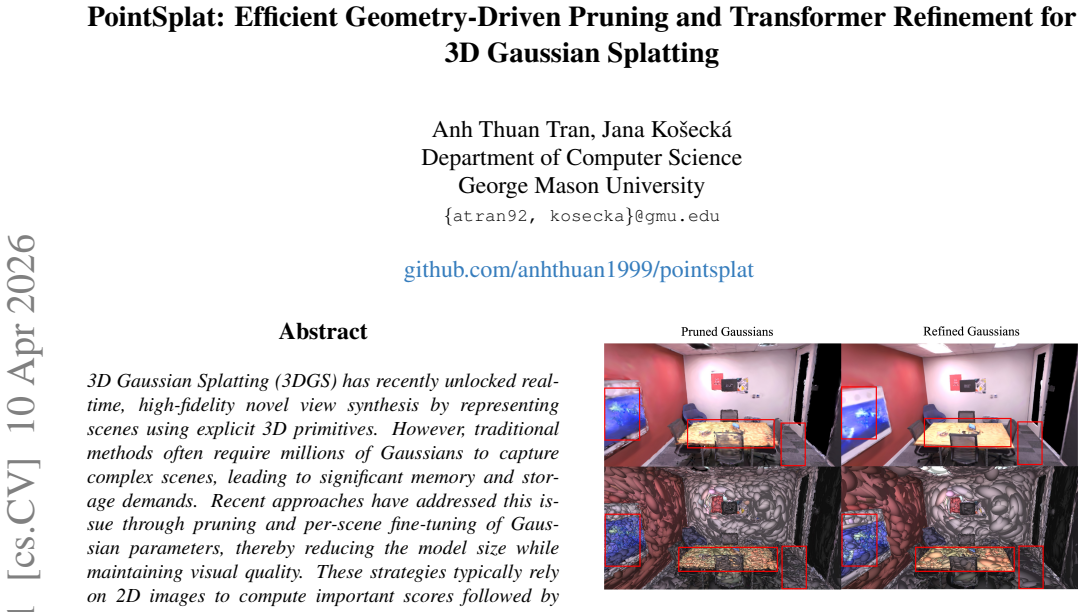
3D Gaussian Splatting (3DGS) has recently unlocked real-time, high-fidelity novel view synthesis by representing scenes using explicit 3D primitives. However, traditional methods often require millions of Gaussians to capture complex scenes, leading to significant memory and storage demands. Recent approaches have addressed this issue through pruning and per-scene fine-tuning of Gaussian parameters, thereby reducing the model size while maintaining visual quality. These strategies typically rely on 2D images to compute important scores followed by scene-specific optimization. In this work, we introduce PointSplat, 3D geometry-driven prune-and-refine framework that bridges previously disjoint directions of gaussian pruning and transformer refinement. Our method includes two key components: (1) an efficient geometry-driven strategy that ranks Gaussians based solely on their 3D attributes, removing reliance on 2D images during pruning stage, and (2) a dual-branch encoder that separates, re-weights geometric and appearance to avoid feature imbalance. Extensive experiments on ScanNet++ and Replica across varying sparsity levels demonstrate that PointSplat consistently achieves competitive rendering quality and superior efficiency without additional per-scene optimization.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces PointSplat, a 3D geometry-driven prune-and-refine framework for 3D Gaussian Splatting. It consists of (1) an efficient pruning step that ranks and removes Gaussians using only intrinsic 3D attributes (position, scale, opacity, covariance) without 2D image-based importance scores, and (2) a dual-branch transformer encoder that separately processes and re-weights geometric and appearance features to mitigate imbalance. Experiments on ScanNet++ and Replica at multiple sparsity levels claim competitive PSNR/SSIM/LPIPS with superior efficiency and no per-scene fine-tuning.
Significance. If the results hold, the contribution would be significant for memory-efficient novel-view synthesis: it decouples pruning from 2D projections and eliminates post-pruning optimization, enabling faster deployment of compact 3DGS models on standard indoor datasets.
major comments (2)
- [§3.1] §3.1 (geometry-driven pruning): the claim that intrinsic 3D attributes alone suffice to rank Gaussians for removal is load-bearing for the competitive-quality assertion, yet the manuscript provides no explicit correlation analysis or ablation showing that the 3D ranking preserves alpha-blended 2D footprints under held-out camera poses; without this, the risk that view-critical primitives are discarded remains unaddressed.
- [§4] §4 (experiments): while results are reported on ScanNet++ and Replica across sparsity levels, the manuscript lacks a direct head-to-head comparison of the proposed 3D-only pruning against a 2D-gradient baseline at identical sparsity ratios; such a table would be required to substantiate that the geometry-driven step does not degrade quality relative to established 2D methods.
minor comments (2)
- The abstract asserts 'competitive rendering quality' and 'superior efficiency' but does not include any numerical values or baseline names; adding a compact results table or key metrics would improve readability.
- [§3.2] Notation for the dual-branch encoder (e.g., how geometric and appearance features are concatenated or re-weighted) is introduced without an accompanying equation or diagram; a single equation in §3.2 would clarify the re-weighting mechanism.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comments point by point below and will revise the manuscript to incorporate the suggested analyses and comparisons.
read point-by-point responses
-
Referee: [§3.1] §3.1 (geometry-driven pruning): the claim that intrinsic 3D attributes alone suffice to rank Gaussians for removal is load-bearing for the competitive-quality assertion, yet the manuscript provides no explicit correlation analysis or ablation showing that the 3D ranking preserves alpha-blended 2D footprints under held-out camera poses; without this, the risk that view-critical primitives are discarded remains unaddressed.
Authors: We agree that an explicit correlation analysis between 3D ranking scores and 2D alpha-blended footprints on held-out views would strengthen the claim. In the revised manuscript we will add a dedicated ablation (new figure and table in §3.1 or appendix) that computes Pearson correlation and rank agreement between our 3D-only scores and 2D-gradient importance scores extracted from held-out camera poses. We will also visualize retained versus discarded Gaussians and their contribution to novel-view renderings. While our current test-set PSNR/SSIM/LPIPS already demonstrate that view-critical primitives are preserved in practice, we accept that the direct analysis is missing and will supply it. revision: yes
-
Referee: [§4] §4 (experiments): while results are reported on ScanNet++ and Replica across sparsity levels, the manuscript lacks a direct head-to-head comparison of the proposed 3D-only pruning against a 2D-gradient baseline at identical sparsity ratios; such a table would be required to substantiate that the geometry-driven step does not degrade quality relative to established 2D methods.
Authors: We concur that a matched-sparsity head-to-head comparison is necessary to isolate the effect of the 3D-only pruning step. In the revised experiments section we will insert a new table that evaluates our geometry-driven pruning (followed by the dual-branch transformer) against a 2D-gradient pruning baseline at exactly the same sparsity ratios on both ScanNet++ and Replica. The table will report PSNR, SSIM, LPIPS, pruning time, and final model size. This addition will allow direct quantification of any quality difference while highlighting our method’s advantages in eliminating 2D image access and per-scene fine-tuning. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper presents an empirical engineering method consisting of a geometry-driven pruning step that ranks Gaussians using only intrinsic 3D attributes (position, scale, opacity, covariance) and a dual-branch transformer encoder for re-weighting geometric and appearance features. No equations, derivations, or results in the provided text reduce by construction to fitted parameters, self-referential definitions, or load-bearing self-citations. The central claims rest on experimental outcomes (competitive PSNR/SSIM/LPIPS on ScanNet++ and Replica at varying sparsity without per-scene optimization) rather than tautological mappings from inputs to outputs. The method is self-contained as a proposed pipeline with independent validation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption 3D Gaussian primitives can be ranked for removal using only their intrinsic 3D attributes without reference to rendered 2D images.
- domain assumption Separating geometric and appearance features into distinct transformer branches prevents one modality from dominating the other.
Reference graph
Works this paper leans on
-
[1]
V ol- ume rendering
Robert A Brebin, Loren Carpenter, and Pat Hanrahan. V ol- ume rendering. InSeminal graphics: pioneering efforts that shaped the field, pages 363–372. 1998. 1
1998
-
[2]
pixelSplat: 3D Gaussian Splats from Im- age Pairs for Scalable Generalizable 3D Reconstruction
David Charatan, Sizhe Lester Li, Andrea Tagliasacchi, and Vincent Sitzmann. pixelSplat: 3D Gaussian Splats from Im- age Pairs for Scalable Generalizable 3D Reconstruction. In Proceedings of the IEEE/CVF conference on computer vi- sion and pattern recognition, pages 19457–19467, 2024. 2, 6
2024
-
[3]
TensoRF: Tensorial Radiance Fields
Anpei Chen, Zexiang Xu, Andreas Geiger, Jingyi Yu, and Hao Su. TensoRF: Tensorial Radiance Fields. InEuropean conference on computer vision, pages 333–350. Springer,
-
[4]
A Survey on 3D Gaussian Splatting
Guikun Chen and Wenguan Wang. A Survey on 3D Gaussian Splatting.arXiv preprint arXiv:2401.03890, 2024. 1
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[5]
MVSplat: Efficient 3D Gaussian Splatting from Sparse Multi-View Images
Yuedong Chen, Haofei Xu, Chuanxia Zheng, Bohan Zhuang, Marc Pollefeys, Andreas Geiger, Tat-Jen Cham, and Jianfei Cai. MVSplat: Efficient 3D Gaussian Splatting from Sparse Multi-View Images. InEuropean Conference on Computer Vision, pages 370–386. Springer, 2024. 2, 6
2024
-
[6]
SplatFormer: Point Trans- former for Robust 3D Gaussian Splatting
Yutong Chen, Marko Mihajlovic, Xiyi Chen, Yiming Wang, Sergey Prokudin, and Siyu Tang. SplatFormer: Point Trans- former for Robust 3D Gaussian Splatting. InICLR, 2025. 2, 3, 5, 6
2025
-
[7]
Francesco Di Sario, Riccardo Renzulli, Marco Grangetto, Akihiro Sugimoto, and Enzo Tartaglione. GoDe: Gaus- sians on Demand for Progressive Level of Detail and Scal- able Compression.arXiv preprint arXiv:2501.13558, 2025. 3
-
[8]
LightGaussian: Unbounded 3D Gaussian Compression with 15x Reduction and 200+ FPS.Advances in neural information processing systems, 37:140138–140158, 2024
Zhiwen Fan, Kevin Wang, Kairun Wen, Zehao Zhu, Dejia Xu, Zhangyang Wang, et al. LightGaussian: Unbounded 3D Gaussian Compression with 15x Reduction and 200+ FPS.Advances in neural information processing systems, 37:140138–140158, 2024. 2, 3
2024
-
[9]
Large Spatial Model: End-to-end Unposed Images to Semantic 3D.Advances in neural information processing systems, 37:40212–40229,
Zhiwen Fan, Jian Zhang, Wenyan Cong, Peihao Wang, Renjie Li, Kairun Wen, Shijie Zhou, Achuta Kadambi, Zhangyang Wang, Danfei Xu, et al. Large Spatial Model: End-to-end Unposed Images to Semantic 3D.Advances in neural information processing systems, 37:40212–40229,
-
[10]
Mini-Splatting: Represent- ing Scenes with a Constrained Number of Gaussians
Guangchi Fang and Bing Wang. Mini-Splatting: Represent- ing Scenes with a Constrained Number of Gaussians. In European Conference on Computer Vision, pages 165–181. Springer, 2024. 2, 3
2024
-
[11]
3D Gaussian as a New Era: A Survey
Ben Fei, Jingyi Xu, Rui Zhang, Qingyuan Zhou, Weidong Yang, and Ying He. 3D Gaussian as a New Era: A Survey. IEEE Transactions on Visualization and Computer Graphics,
-
[12]
Speedy-Splat: Fast 3D Gaus- sian Splatting with Sparse Pixels and Sparse Primitives
Alex Hanson, Allen Tu, Geng Lin, Vasu Singla, Matthias Zwicker, and Tom Goldstein. Speedy-Splat: Fast 3D Gaus- sian Splatting with Sparse Pixels and Sparse Primitives. In Proceedings of the Computer Vision and Pattern Recognition Conference (CVPR), pages 21537–21546, 2025. 2, 3
2025
-
[13]
Pup 3d-gs: Principled uncertainty pruning for 3d gaussian splatting
Alex Hanson, Allen Tu, Vasu Singla, Mayuka Jayawardhana, Matthias Zwicker, and Tom Goldstein. Pup 3d-gs: Principled uncertainty pruning for 3d gaussian splatting. InProceedings of the Computer Vision and Pattern Recognition Conference (CVPR), pages 5949–5958, 2025. 2, 3
2025
-
[14]
3D Gaussian Splatting for Real-Time Radiance Field Rendering.ACM Trans
Bernhard Kerbl, Georgios Kopanas, Thomas Leimk ¨uhler, and George Drettakis. 3D Gaussian Splatting for Real-Time Radiance Field Rendering.ACM Trans. Graph., 42(4):139– 1, 2023. 1, 2, 3, 5, 6
2023
-
[15]
Point-Based Neural Rendering with Per- View Optimization
Georgios Kopanas, Julien Philip, Thomas Leimk ¨uhler, and George Drettakis. Point-Based Neural Rendering with Per- View Optimization. InComputer Graphics Forum, pages 29–43. Wiley Online Library, 2021. 1, 2, 4
2021
-
[16]
LODGE: Level- of-detail large-scale Gaussian splatting with efficient render- ing
Jonas Kulhanek, Marie-Julie Rakotosaona, Fabian Man- hardt, Christina Tsalicoglou, Michael Niemeyer, Torsten Sat- tler, Songyou Peng, and Federico Tombari. LODGE: Level- of-detail large-scale Gaussian splatting with efficient render- ing. InProceedings of the 39th International Conference on Neural Information Processing Systems, 2025. 3
2025
-
[17]
Stratified Trans- former for 3D Point Cloud Segmentation
Xin Lai, Jianhui Liu, Li Jiang, Liwei Wang, Hengshuang Zhao, Shu Liu, Xiaojuan Qi, and Jiaya Jia. Stratified Trans- former for 3D Point Cloud Segmentation. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 8500–8509, 2022. 3
2022
-
[18]
Compact 3D Gaussian Representation for Radiance Field
Joo Chan Lee, Daniel Rho, Xiangyu Sun, Jong Hwan Ko, and Eunbyung Park. Compact 3D Gaussian Representation for Radiance Field. InProceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition, pages 21719–21728, 2024. 3
2024
-
[19]
MVSGaussian: Fast Generalizable Gaussian Splatting Re- construction from Multi-View Stereo
Tianqi Liu, Guangcong Wang, Shoukang Hu, Liao Shen, Xinyi Ye, Yuhang Zang, Zhiguo Cao, Wei Li, and Ziwei Liu. MVSGaussian: Fast Generalizable Gaussian Splatting Re- construction from Multi-View Stereo. InEuropean Confer- ence on Computer Vision, pages 37–53. Springer, 2024. 2
2024
-
[20]
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis.Communications of the ACM, 65(1):99–106,
Ben Mildenhall, Pratul P Srinivasan, Matthew Tancik, Jonathan T Barron, Ravi Ramamoorthi, and Ren Ng. NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis.Communications of the ACM, 65(1):99–106,
-
[21]
Instant Neural Graphics Primitives with a Mul- tiresolution Hash Encoding.ACM transactions on graphics (TOG), 41(4):1–15, 2022
Thomas M ¨uller, Alex Evans, Christoph Schied, and Alexan- der Keller. Instant Neural Graphics Primitives with a Mul- tiresolution Hash Encoding.ACM transactions on graphics (TOG), 41(4):1–15, 2022. 2
2022
-
[22]
LapisGS: Layered Progressive 3D Gaus- sian Splatting for Adaptive Streaming
Yuang Shi, G ´eraldine Morin, Simone Gasparini, and Wei Tsang Ooi. LapisGS: Layered Progressive 3D Gaus- sian Splatting for Adaptive Streaming. In2025 International Conference on 3D Vision (3DV), pages 991–1000. IEEE,
-
[23]
The Replica Dataset: A Digital Replica of Indoor Spaces
Julian Straub, Thomas Whelan, Lingni Ma, Yufan Chen, Erik Wijmans, Simon Green, Jakob J Engel, Raul Mur-Artal, Carl Ren, Shobhit Verma, et al. The Replica Dataset: A Digital Replica of Indoor Spaces.arXiv preprint arXiv:1906.05797,
work page internal anchor Pith review arXiv 1906
-
[24]
Nerfstudio: A Modular Framework for Neural Radiance Field Develop- ment
Matthew Tancik, Ethan Weber, Evonne Ng, Ruilong Li, Brent Yi, Terrance Wang, Alexander Kristoffersen, Jake Austin, Kamyar Salahi, Abhik Ahuja, et al. Nerfstudio: A Modular Framework for Neural Radiance Field Develop- ment. InACM SIGGRAPH 2023 conference proceedings, pages 1–12, 2023. 6
2023
-
[25]
PointCT: Point Central Transformer Network for Weakly-supervised Point Cloud Semantic Segmentation
Anh-Thuan Tran, Hoanh-Su Le, Suk-Hwan Lee, and Ki- Ryong Kwon. PointCT: Point Central Transformer Network for Weakly-supervised Point Cloud Semantic Segmentation. InProceedings of the IEEE/CVF Winter Conference on Ap- plications of Computer Vision, pages 3556–3565, 2024. 3
2024
-
[26]
IBRNet: Learning Multi-View Image-Based Rendering
Qianqian Wang, Zhicheng Wang, Kyle Genova, Pratul P Srinivasan, Howard Zhou, Jonathan T Barron, Ricardo Martin-Brualla, Noah Snavely, and Thomas Funkhouser. IBRNet: Learning Multi-View Image-Based Rendering. In Proceedings of the IEEE/CVF conference on computer vi- sion and pattern recognition, pages 4690–4699, 2021. 2
2021
-
[27]
Point Transformer V2: Grouped Vector Atten- tion and Partition-based Pooling.Advances in Neural Infor- mation Processing Systems, 35:33330–33342, 2022
Xiaoyang Wu, Yixing Lao, Li Jiang, Xihui Liu, and Heng- shuang Zhao. Point Transformer V2: Grouped Vector Atten- tion and Partition-based Pooling.Advances in Neural Infor- mation Processing Systems, 35:33330–33342, 2022. 3, 5
2022
-
[28]
Point Transformer V3: Simpler Faster Stronger
Xiaoyang Wu, Li Jiang, Peng-Shuai Wang, Zhijian Liu, Xi- hui Liu, Yu Qiao, Wanli Ouyang, Tong He, and Hengshuang Zhao. Point Transformer V3: Simpler Faster Stronger. In Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition, pages 4840–4851, 2024. 3, 5
2024
-
[29]
PhysGaussian: Physics- Integrated 3D Gaussians for Generative Dynamics
Tianyi Xie, Zeshun Zong, Yuxing Qiu, Xuan Li, Yutao Feng, Yin Yang, and Chenfanfu Jiang. PhysGaussian: Physics- Integrated 3D Gaussians for Generative Dynamics. InPro- ceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4389–4398, 2024. 3
2024
-
[30]
ScanNet++: A High-Fidelity Dataset of 3D Indoor Scenes
Chandan Yeshwanth, Yueh-Cheng Liu, Matthias Nießner, and Angela Dai. ScanNet++: A High-Fidelity Dataset of 3D Indoor Scenes. InProceedings of the IEEE/CVF Interna- tional Conference on Computer Vision, pages 12–22, 2023. 5
2023
-
[31]
pixelNeRF: Neural Radiance Fields from One or Few Im- ages
Alex Yu, Vickie Ye, Matthew Tancik, and Angjoo Kanazawa. pixelNeRF: Neural Radiance Fields from One or Few Im- ages. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 4578–4587,
-
[32]
Point Transformer
Hengshuang Zhao, Li Jiang, Jiaya Jia, Philip HS Torr, and Vladlen Koltun. Point Transformer. InProceedings of the IEEE/CVF international conference on computer vision, pages 16259–16268, 2021. 3, 5
2021
-
[33]
3d gaussian splatting in robotics: A survey,
Siting Zhu, Guangming Wang, Xin Kong, Dezhi Kong, and Hesheng Wang. 3D Gaussian Splatting in Robotics: A Sur- vey.arXiv preprint arXiv:2410.12262, 2024. 1
-
[34]
NICE-SLAM: Neural Implicit Scalable Encoding for SLAM
Zihan Zhu, Songyou Peng, Viktor Larsson, Weiwei Xu, Hu- jun Bao, Zhaopeng Cui, Martin R Oswald, and Marc Polle- feys. NICE-SLAM: Neural Implicit Scalable Encoding for SLAM. InProceedings of the IEEE/CVF conference on com- puter vision and pattern recognition, pages 12786–12796,
-
[35]
PRoGS: Progressive Rendering of Gaussian Splats
Brent Zoomers, Maarten Wijnants, Ivan Molenaers, Joni Vanherck, Jeroen Put, Lode Jorissen, and Nick Michiels. PRoGS: Progressive Rendering of Gaussian Splats. InPro- ceedings of the Winter Conference on Applications of Com- puter Vision, pages 3118–3127, 2025. 3 10
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.