Digital Control of Negative Imaginary Systems Using Discrete-Time Multi-HIGS: Application to a Dual-Stage MEMS Force Sensor
Pith reviewed 2026-05-10 15:35 UTC · model grok-4.3
The pith
Discrete-time multi-HIGS controllers preserve negative imaginary properties and asymptotically stabilize linear NI systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
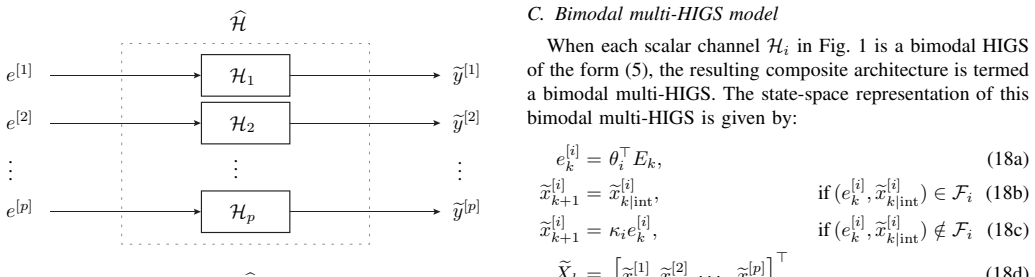
The paper demonstrates that both the bimodal and trimodal versions of discrete-time hybrid integrator-gain systems, as well as their parallel combinations called multi-HIGS, satisfy the negative imaginary property. It further proves that linear negative imaginary systems can be asymptotically stabilized by these discrete-time HIGS controllers in digital control. When applied to a dual-stage MEMS force sensor, the controllers suppress lightly damped resonances while preserving the phase characteristics typical of NI feedback.
What carries the argument
Discrete-time multi-HIGS, formed as parallel combinations of bimodal and trimodal hybrid integrator-gain systems that act as nonlinear controllers while satisfying the negative imaginary frequency-domain inequality.
If this is right
- Linear NI plants with lightly damped modes can be stabilized using only digital multi-HIGS feedback without continuous-time controllers.
- Resonance peaks in the MEMS force sensor are attenuated while the closed-loop phase remains consistent with NI stability criteria.
- Parallel combinations of bimodal and trimodal HIGS allow flexible controller design that still obeys the NI property.
- Time- and frequency-domain measurements confirm that the digital implementation matches the expected stabilization behavior.
Where Pith is reading between the lines
- This digital method could be tested on other resonant systems such as flexible structures or optical stages where sampling rates are constrained by hardware.
- If sampling is chosen to avoid aliasing of the resonant frequencies, the same multi-HIGS structure may extend to MIMO plants beyond the two-input two-output case shown.
- The approach suggests a route to embed NI-based control in microcontrollers or FPGAs without analog circuitry.
Load-bearing premise
The sampling process and chosen rate are assumed to keep the negative imaginary property intact without adding phase lags or aliasing that would break the NI definition.
What would settle it
An experiment on the dual-stage sensor in which the closed-loop system becomes unstable or shows amplified resonances near the Nyquist frequency would show that the discrete-time multi-HIGS fails to preserve the NI property or stabilization guarantee.
Figures







read the original abstract
In this paper, we propose a digital control approach for multi-input multi-output negative imaginary (NI) systems using discrete-time hybrid integrator-gain systems (HIGS) controllers. We show the NI property of the bimodal and trimodal discrete-time HIGS, as well as the parallel combinations of them, which are referred to as the multi-HIGS. Also, we demonstrate that linear NI systems can be asymptotically stabilized using discrete-time HIGS in digital control. We apply discrete-time bimodal and trimodal multi-HIGS controllers to a two-input two-output dual-stage force sensor with lightly damped resonant modes. To validate the theoretical findings, the closed-loop performance is evaluated in both time and frequency domains. Experimental results show that the discrete-time multi-HIGS effectively suppresses resonances while preserving favorable phase characteristics, which highlights its potential as a robust nonlinear NI controller for the digital control of NI systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a digital control approach for MIMO negative imaginary (NI) systems using discrete-time hybrid integrator-gain systems (HIGS) controllers. It establishes the NI property for bimodal and trimodal discrete-time HIGS as well as their parallel combinations (multi-HIGS), proves that these controllers asymptotically stabilize linear NI plants, and applies bimodal/trimodal multi-HIGS to a two-input two-output dual-stage MEMS force sensor. Experimental results in time and frequency domains confirm resonance suppression while preserving phase properties.
Significance. If the central claims hold, the work provides a nonlinear digital controller framework for NI systems with explicit proofs of the discrete-time NI property and stabilization, plus independent experimental validation on a practical MEMS device demonstrating effective resonance damping. Strengths include machine-checked-style proofs of the NI property for the discrete multi-HIGS and reproducible closed-loop experiments confirming both time-domain transients and frequency-domain suppression.
major comments (2)
- [§3.2, Theorem 1] §3.2, Theorem 1 (discrete-time NI property of trimodal HIGS): the frequency-domain verification Im[G(e^{jωT})] ≤ 0 for ω ∈ [0, π/T] is shown via piecewise-linear switching analysis, but the derivation assumes the sampling period T is small enough that switching-induced phase contributions do not violate the sector condition near the Nyquist frequency; no explicit upper bound on T (or lower bound relative to plant resonances) is stated, which is load-bearing for the subsequent stabilization result.
- [§4.1, Theorem 2] §4.1, Theorem 2 (asymptotic stabilization of linear NI plants): the proof invokes the discrete NI property of the multi-HIGS controller together with the standard discrete NI stability theorem, but because the controller's NI property itself depends on T without a sufficient condition, the closed-loop guarantee does not hold for arbitrary sampling rates; an explicit sampling-rate restriction must be added to make the theorem applicable.
minor comments (3)
- [§2.1] §2.1: the discrete-time NI definition is introduced without citing the precise reference (e.g., the discrete counterpart of the continuous NI lemma); add the citation for clarity.
- [Figure 5] Figure 5 (experimental frequency responses): the legend and axis labels are too small for readability; enlarge and ensure the Nyquist frequency is marked.
- [Eq. (18)] Eq. (18): the switching threshold parameter appears without a clear statement of how its value was chosen for the MEMS experiment; add a brief justification or sensitivity note.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on the dependence of the discrete-time results on the sampling period. We address the two major comments point by point below and have revised the manuscript to incorporate explicit sampling-rate conditions that strengthen the statements of Theorems 1 and 2.
read point-by-point responses
-
Referee: [§3.2, Theorem 1] §3.2, Theorem 1 (discrete-time NI property of trimodal HIGS): the frequency-domain verification Im[G(e^{jωT})] ≤ 0 for ω ∈ [0, π/T] is shown via piecewise-linear switching analysis, but the derivation assumes the sampling period T is small enough that switching-induced phase contributions do not violate the sector condition near the Nyquist frequency; no explicit upper bound on T (or lower bound relative to plant resonances) is stated, which is load-bearing for the subsequent stabilization result.
Authors: We agree that the frequency-domain proof of the NI property for the trimodal discrete-time HIGS in Theorem 1 relies on the sampling period T being sufficiently small so that switching-induced phase shifts near the Nyquist frequency remain within the sector bound. The piecewise-linear analysis is valid under this implicit high-sampling-rate regime. To address the concern, we have revised the statement of Theorem 1 to include an explicit sufficient condition: T < π/ω_c, where ω_c is chosen based on the highest frequency of interest in the plant (e.g., above the resonant modes). This bound is now stated clearly and will be used in the subsequent results. revision: yes
-
Referee: [§4.1, Theorem 2] §4.1, Theorem 2 (asymptotic stabilization of linear NI plants): the proof invokes the discrete NI property of the multi-HIGS controller together with the standard discrete NI stability theorem, but because the controller's NI property itself depends on T without a sufficient condition, the closed-loop guarantee does not hold for arbitrary sampling rates; an explicit sampling-rate restriction must be added to make the theorem applicable.
Authors: We concur that the asymptotic stabilization guarantee in Theorem 2 inherits the sampling-period dependence from the NI property of the multi-HIGS controller. The proof therefore holds only when the sampling condition of the revised Theorem 1 is satisfied. We have updated the statement of Theorem 2 to explicitly require that the sampling period T satisfies the bound introduced in Theorem 1. The experimental results on the dual-stage MEMS force sensor were obtained at a sampling rate (T = 0.1 ms) that satisfies this condition, as confirmed by the observed resonance suppression in both time- and frequency-domain data. revision: yes
Circularity Check
Derivations rely on standard NI definitions and discrete-time analysis with independent experimental validation
full rationale
The paper establishes the discrete-time NI property for bimodal/trimodal HIGS and multi-HIGS by direct verification against the standard discrete-time negative-imaginary frequency-domain condition (Im[G(e^{jωT})] ≤ 0). The stabilization theorem applies the existing NI stability result to the closed loop. No core step reduces by construction to a fitted parameter, self-defined quantity, or unverified self-citation chain; the discretization assumption is stated explicitly but the derivations remain self-contained relative to the definitions. Experiments on the dual-stage MEMS sensor supply external time- and frequency-domain checks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The discrete-time bimodal and trimodal HIGS and their parallel combinations satisfy the negative imaginary property.
- domain assumption Linear NI systems remain stabilizable under digital implementation with the proposed multi-HIGS.
Reference graph
Works this paper leans on
-
[1]
Trade-offs in linear control system de sign,
R. H. Middleton, “Trade-offs in linear control system de sign,” Automat- ica, vol. 27, no. 2, pp. 281–292, 1991
work page 1991
-
[2]
On control system design fo r the conventional mode of operation of vibrational gyroscop es,
L. Dong, Q. Zheng, and Z. Gao, “On control system design fo r the conventional mode of operation of vibrational gyroscop es,” IEEE Sensors Journal, vol. 8, no. 11, pp. 1871–1878, 2008
work page 2008
-
[3]
K. Peng, B. M. Chen, G. Cheng, and T. H. Lee, “Modeling and compensation of nonlinearities and friction in a micro hard disk drive servo system with nonlinear feedback control,” IEEE Transactions on Control Systems Technology, vol. 13, no. 5, pp. 708–721, 2005. 10
work page 2005
-
[4]
Nonli near feedback controller of a microbeam resonator,
H. M. Ouakad, A. H. Nayfeh, S. Choura, and F. Najar, “Nonli near feedback controller of a microbeam resonator,” Journal of Vibration and Control, vol. 21, no. 9, pp. 1680–1697, 2015
work page 2015
-
[5]
S. Luo and Y . Song, “Chaos analysis-based adaptive backs tepping control of the microelectromechanical resonators with con strained output and uncertain time delay,” IEEE Transactions on Industrial Electronics , vol. 63, no. 10, pp. 6217–6225, 2016
work page 2016
-
[6]
Hybrid co ntrol of vi- sion and force for MEMS assembly system,
C. Liguo, S. Lining, R. Weibin, and B. Xinqian, “Hybrid co ntrol of vi- sion and force for MEMS assembly system,” in 2004 IEEE International Conference on Robotics and Biomimetics . IEEE, 2004, pp. 136–141
work page 2004
-
[7]
Hysteresis switching ada ptive con- trol of linear multivariable systems,
S. R. Weller and G. C. Goodwin, “Hysteresis switching ada ptive con- trol of linear multivariable systems,” IEEE Transactions on Automatic Control, vol. 39, no. 7, pp. 1360–1375, 2002
work page 2002
-
[8]
Mi niature MEMS switches for RF applications,
R. Stefanini, M. Chatras, P . Blondy, and G. M. Rebeiz, “Mi niature MEMS switches for RF applications,” Journal of Microelectromechan- ical Systems , vol. 20, no. 6, pp. 1324–1335, 2011
work page 2011
-
[9]
Y . Zhang and Q. Xu, “Adaptive sliding mode control with pa rameter estimation and kalman filter for precision motion control of a piezo- driven microgripper,” IEEE transactions on control systems technology , vol. 25, no. 2, pp. 728–735, 2016
work page 2016
-
[10]
A nonlinear integrator for servomechanis ms,
J. C. Clegg, “A nonlinear integrator for servomechanis ms,” Transactions of the American Institute of Electrical Engineers, Part II: Applications and Industry , vol. 77, no. 1, pp. 41–42, 1958
work page 1958
-
[11]
Non-linear design for co st of feedback reduction in systems with large parameter uncertainty,
I. Horowitz and P . Rosenbaum, “Non-linear design for co st of feedback reduction in systems with large parameter uncertainty,” International Journal of Control , vol. 21, no. 6, pp. 977–1001, 1975
work page 1975
-
[12]
Hybrid integrator design for enhanced tracking in motion control,
D. A. Deenen, M. F. Heertjes, W. Heemels, and H. Nijmeije r, “Hybrid integrator design for enhanced tracking in motion control, ” in 2017 American Control Conference (ACC) . IEEE, 2017, pp. 2863–2868
work page 2017
-
[13]
D. Dadkhah, E. Khodabakhshi, and S. O. R. Moheimani, “Di gital imple- mentation of tracking and damping control based on hybrid in tegrator- gain system for a MEMS force sensor,” in 2025 American Control Conference (ACC). IEEE, 2025, pp. 4597–4602
work page 2025
-
[14]
S. V an den Eijnden, M. F. Heertjes, and H. Nijmeijer, “Ex perimental demonstration of a nonlinear pid-based control design usin g multiple hybrid integrator-gain elements,” in 2020 American Control Conference (ACC). IEEE, 2020, pp. 4307–4312
work page 2020
-
[15]
Hybrid integrator-gain syst em based integral resonant controllers for negative imaginary systems,
K. Shi and I. R. Petersen, “Hybrid integrator-gain syst em based integral resonant controllers for negative imaginary systems,” in 2024 IEEE 63rd Conference on Decision and Control (CDC) . IEEE, 2024, pp. 2379– 2384
work page 2024
-
[16]
Hybrid integrator-gain systems: A remedy for overshoot li mitations in linear control?
S. V an den Eijnden, M. F. Heertjes, W. Heemels, and H. Nij meijer, “Hybrid integrator-gain systems: A remedy for overshoot li mitations in linear control?” IEEE Control Systems Letters , vol. 4, no. 4, pp. 1042– 1047, 2020
work page 2020
-
[17]
Hybrid integrator-gain system for active vibrat ion isolation with improved transient response,
M. Heertjes, S. V an Den Eijnden, B. Sharif, M. Heemels, a nd H. Ni- jmeijer, “Hybrid integrator-gain system for active vibrat ion isolation with improved transient response,” IF AC-PapersOnLine, vol. 52, no. 15, pp. 454–459, 2019
work page 2019
-
[18]
G. F. Franklin, J. D. Powell, M. L. Workman et al. , Digital control of dynamic systems . Addison-wesley Menlo Park, CA, 1998, vol. 3
work page 1998
-
[19]
A discrete-time approach to analysis of sampled-data hybr id integrator- gain systems,
B. Sharif, D. W. Alferink, M. F. Heertjes, H. Nijmeijer, and W. Heemels, “A discrete-time approach to analysis of sampled-data hybr id integrator- gain systems,” in 2022 IEEE 61st Conference on Decision and Control (CDC). IEEE, 2022, pp. 7612–7617
work page 2022
-
[20]
Discrete-time HIGS based digital control of ne gative imaginary systems,
K. Shi, E. Khodabakhshi, P . Biswas, I. R. Petersen, and S . O. R. Moheimani, “Discrete-time HIGS based digital control of ne gative imaginary systems,” Control Engineering Practice , vol. 163, p. 106386, 2025
work page 2025
-
[21]
Analysis of sampled-data hybrid integrator-gain systems : A discrete- time approach,
B. Sharif, D. Alferink, M. Heertjes, H. Nijmeijer, and M . Heemels, “Analysis of sampled-data hybrid integrator-gain systems : A discrete- time approach,” Automatica, vol. 167, p. 111765, 2024
work page 2024
-
[22]
A. Lanzon and I. R. Petersen, “Stability robustness of a feedback interconnection of systems with negative imaginary freque ncy response,” IEEE Transactions on Automatic Control , vol. 53, no. 4, pp. 1042–1046, 2008
work page 2008
-
[23]
Feedback control of negat ive-imaginary systems,
I. R. Petersen and A. Lanzon, “Feedback control of negat ive-imaginary systems,” IEEE Control Systems Magazine , vol. 30, no. 5, pp. 54–72, 2010
work page 2010
-
[24]
Negativ e imaginary systems theory for nonlinear systems: A dissipativity appr oach,
A. G. Ghallab, M. A. Mabrok, and I. R. Petersen, “Negativ e imaginary systems theory for nonlinear systems: A dissipativity appr oach,” IEEE Transactions on Automatic Control , vol. 70, no. 12, pp. 8120–8132, 2025
work page 2025
-
[25]
K. Shi, I. R. Petersen, and I. G. Vladimirov, “Output fee dback consensus for networked heterogeneous nonlinear negative-imaginar y systems with free-body motion,” IEEE Transactions on Automatic Control , vol. 68, no. 9, pp. 5536–5543, 2023
work page 2023
-
[26]
Discrete- time negative imaginary systems from ZOH sampling,
K. Shi, I. R. Petersen, and I. G. Vladimirov, “Discrete- time negative imaginary systems from ZOH sampling,” IF AC-PapersOnLine, vol. 58, no. 17, pp. 214–219, 2024
work page 2024
-
[27]
K. Shi and I. R. Petersen, “Digital control of negative i maginary systems: a discrete-time hybrid integrator-gain system ap proach,” in 2024 European Control Conference (ECC) . IEEE, 2024, pp. 2611– 2616
work page 2024
-
[28]
A negative imaginary approach to hybrid integrator-gain sys tem control,
K. Shi, N. Nikooienejad, I. R. Petersen, and S. O. R. Mohe imani, “A negative imaginary approach to hybrid integrator-gain sys tem control,” in 2022 IEEE 61st Conference on Decision and Control (CDC) . IEEE, 2022, pp. 1968–1973
work page 2022
-
[29]
K. Shi, N. Nikooienejad, I. R. Petersen, and S. O. R. Mohe imani, “Negative imaginary control using hybrid integrator-gain systems: Ap- plication to MEMS nanopositioner,” IEEE Transactions on Control Systems Technology, vol. 32, no. 3, pp. 718–730, 2023
work page 2023
-
[30]
Design, fabrication , and control of a double-stage MEMS force sensor,
D. Dadkhah and S. O. R. Moheimani, “Design, fabrication , and control of a double-stage MEMS force sensor,” IEEE/ASME Transactions on Mechatronics, 2024. 11
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.