Situation-Aware Feedback-Predictive Control Framework for Lane-Less Dense Traffic
Pith reviewed 2026-05-10 14:49 UTC · model grok-4.3
The pith
A hybrid control framework uses 360° perception to derive virtual lanes and predict trajectories for safe navigation in dense lane-less traffic.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
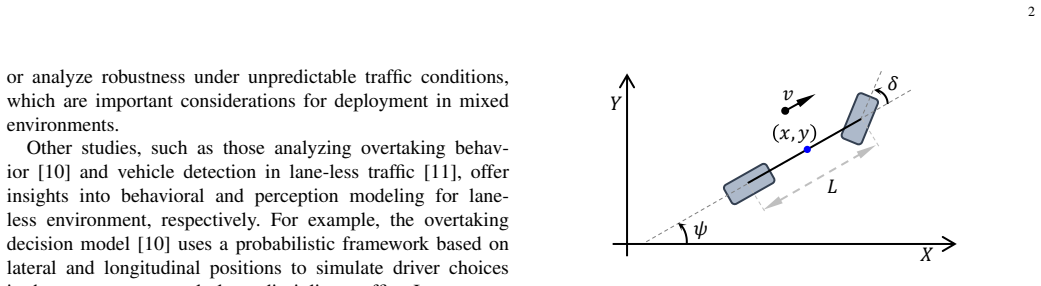
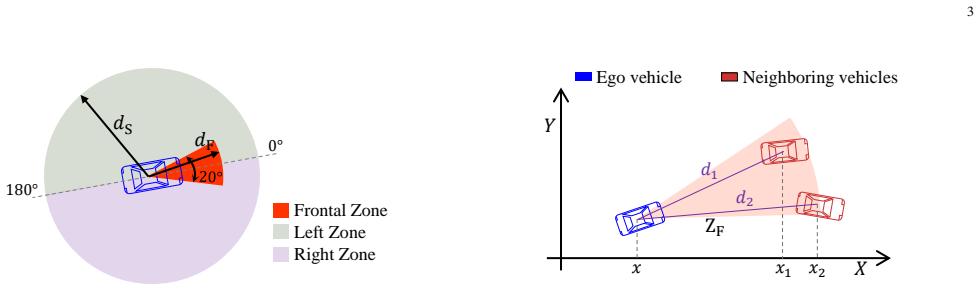
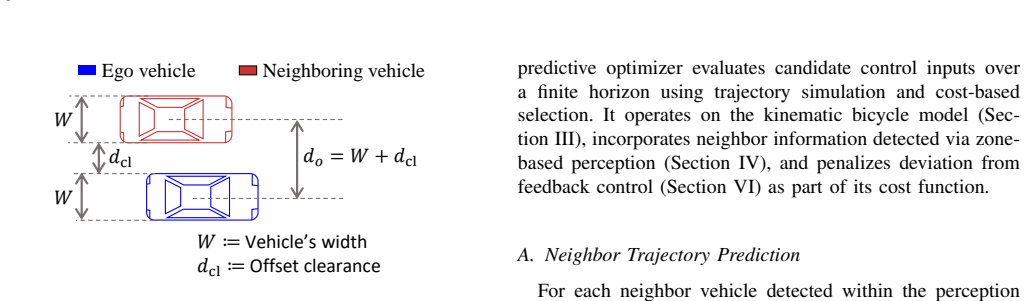
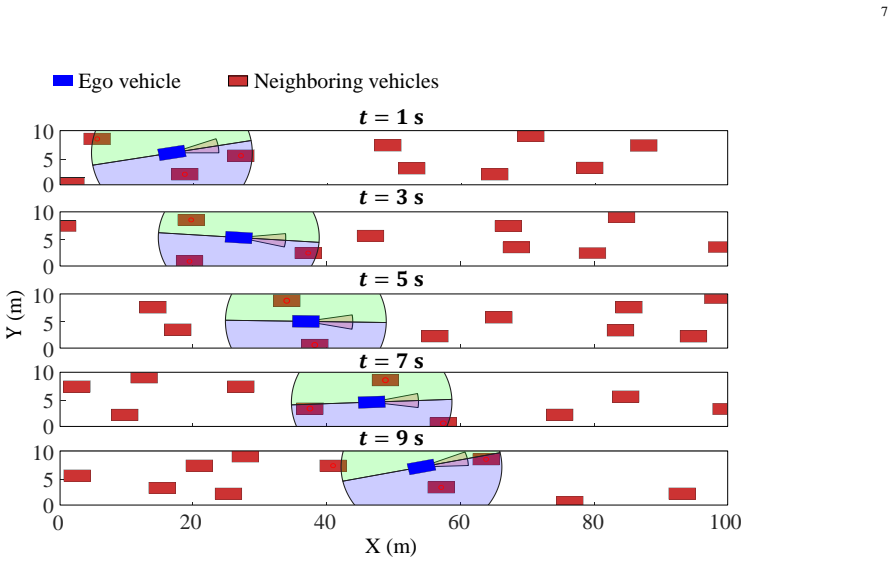
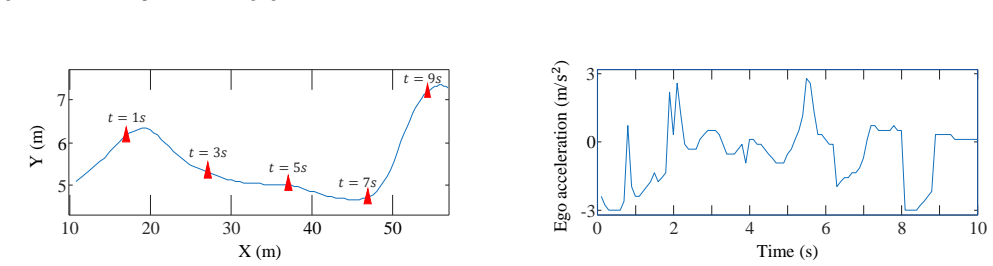
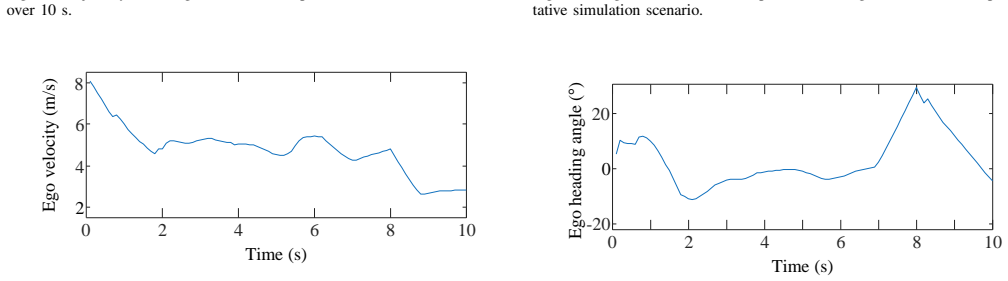
The central claim is that integrating a 360° zone-based perception module with a dual-layer controller—longitudinal feedback for reference speed derived from braking distance and steering dynamics, lateral tracking of a virtual optimal lane from neighbor spatial distribution, and a predictive planner that evaluates sampled trajectories via a multi-term cost function—enables reliable operation in dense, unstructured, one-way traffic.
What carries the argument
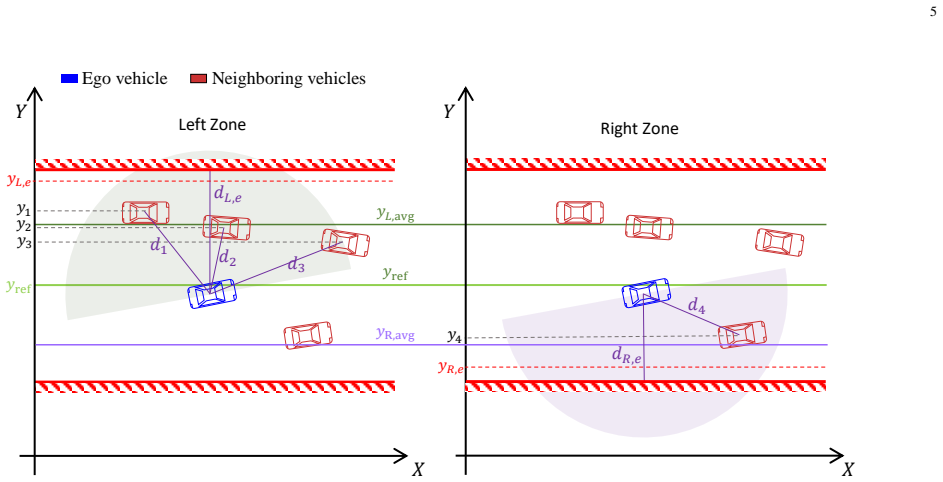
The dual-layer feedback-predictive strategy driven by a 360° zone-based perception module that supplies spatial distribution data to create and track a virtual optimal lane.
If this is right
- Autonomous vehicles can operate without fixed lane markings by following dynamically generated virtual lanes.
- The framework maintains safe longitudinal spacing through braking-distance-based speed references.
- Predictive sampling over a time horizon allows selection of feasible paths amid chaotic neighbor motion.
- The approach applies across diverse one-way dense traffic densities and driver behaviors in simulation.
Where Pith is reading between the lines
- Extending the perception module to include velocity prediction of neighbors could improve long-horizon trajectory selection.
- The same virtual-lane concept might be tested in mixed human-driven and autonomous traffic to measure interaction effects.
- Hardware validation with real sensor noise would reveal whether the cost function still selects safe trajectories.
- The framework could be combined with map-free local planning for fully unstructured environments beyond one-way roads.
Load-bearing premise
The 360° zone-based perception module can deliver reliable spatial distribution data on neighboring vehicles even when driver behavior is highly unpredictable and traffic is dense.
What would settle it
A simulation run in which the perception module supplies incomplete or noisy vehicle position data in high-density traffic, causing the selected trajectory to violate safe distances or produce collisions.
Figures
read the original abstract
Navigating dense, lane-less traffic remains one of the most challenging scenarios for autonomous vehicles, especially in emerging regions where road structure and driver behavior are highly unpredictable. This paper presents a hybrid control framework tailored for such environments, integrating a $360^\circ$ zone-based perception module with a dual-layer control strategy that combines classical feedback and predictive optimization. The longitudinal feedback controller computes reference speed based on braking distance and steering dynamics, while the lateral controller tracks a virtual optimal lane derived from the spatial distribution of neighboring vehicles. The predictive planner samples control inputs over a time horizon and selects the most feasible trajectory using a multi-term cost function. Simulation results across diverse one-way traffic scenarios demonstrate the framework's robustness, responsiveness, and suitability for chaotic, unstructured traffic.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a hybrid Situation-Aware Feedback-Predictive Control Framework for autonomous vehicles in dense, lane-less traffic. It combines a 360° zone-based perception module with a dual-layer controller: a longitudinal feedback law that sets reference speed from braking distance and steering dynamics, a lateral controller that tracks a virtual optimal lane derived from neighboring vehicle spatial distribution, and a predictive planner that samples inputs over a horizon and selects trajectories via a multi-term cost function. Simulations in diverse one-way scenarios are stated to demonstrate robustness, responsiveness, and suitability for chaotic, unstructured traffic.
Significance. If the simulations were shown to incorporate realistic perception errors, occlusions, and driver stochasticity, the work could offer a practical hybrid classical-predictive method for unstructured traffic environments where lane markings are absent. The approach builds on standard control primitives but tailors them to zone-based perception; however, the absence of quantitative validation currently prevents assessment of whether the claimed robustness holds beyond idealized conditions.
major comments (2)
- [Abstract] Abstract: the statement that 'Simulation results across diverse one-way traffic scenarios demonstrate the framework's robustness, responsiveness, and suitability for chaotic, unstructured traffic' supplies no quantitative metrics, baseline comparisons, error bars, trajectory evaluation criteria, or details on injected disturbances. This is load-bearing for the central claim, as the data cannot be checked against the assertion of suitability for chaotic traffic.
- [Framework Description] Perception-to-control interface (described in the framework overview): both the longitudinal speed reference and lateral virtual-lane tracking take the zone-based spatial distribution as direct input. No modeling or testing of perception errors, partial occlusions, or driver-model stochasticity beyond nominal distributions is indicated, so the reported robustness is conditioned on perfect sensing—the precise regime the paper claims to address.
minor comments (1)
- [Abstract] The abstract refers to a 'multi-term cost function' without enumerating the terms or their relative weights; adding this specification in the predictive planner section would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments on our manuscript. We address each major comment point by point below, indicating where revisions will be made to improve clarity and strengthen the presentation of results.
read point-by-point responses
-
Referee: [Abstract] Abstract: the statement that 'Simulation results across diverse one-way traffic scenarios demonstrate the framework's robustness, responsiveness, and suitability for chaotic, unstructured traffic' supplies no quantitative metrics, baseline comparisons, error bars, trajectory evaluation criteria, or details on injected disturbances. This is load-bearing for the central claim, as the data cannot be checked against the assertion of suitability for chaotic traffic.
Authors: We agree that the abstract claim is currently stated qualitatively without supporting numerical evidence. In the revised manuscript we will update the abstract to include concrete performance metrics drawn from the simulation section, such as average vehicle speed, minimum inter-vehicle distances maintained, collision avoidance success rates, and trajectory smoothness measures across the tested scenarios. We will also briefly reference the evaluation criteria and disturbance conditions used in the simulations to allow readers to assess the robustness claims directly. revision: yes
-
Referee: [Framework Description] Perception-to-control interface (described in the framework overview): both the longitudinal speed reference and lateral virtual-lane tracking take the zone-based spatial distribution as direct input. No modeling or testing of perception errors, partial occlusions, or driver-model stochasticity beyond nominal distributions is indicated, so the reported robustness is conditioned on perfect sensing—the precise regime the paper claims to address.
Authors: The referee correctly identifies that the current simulations assume perfect perception of the zone-based spatial distribution. This assumption is standard for initial validation of the control architecture but does limit the direct applicability to noisy real-world sensing. In the revised version we will explicitly state the perfect-sensing assumption in the framework and simulation sections. We will add a new limitations subsection that discusses the implications of perception errors and occlusions, describes how the zone-based representation could be augmented with uncertainty handling, and includes a preliminary sensitivity study to bounded perception noise where feasible. revision: yes
Circularity Check
No significant circularity; derivation relies on standard control primitives without self-referential reduction
full rationale
The paper presents a hybrid control framework combining a 360° zone-based perception module, longitudinal feedback for reference speed, lateral virtual-lane tracking, and a predictive planner with multi-term cost function. No equations, fitted parameters, or self-citations appear in the abstract or described structure that would reduce any claimed prediction or result to its own inputs by construction. Simulation results are offered as empirical demonstrations of robustness rather than derivations that tautologically reproduce fitted quantities. The approach rests on classical feedback and optimization methods without evident self-definitional loops, fitted-input predictions, or load-bearing self-citations. This is the expected outcome for a control-framework paper whose central claims remain independent of the reported simulations.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption 360° zone-based perception supplies accurate spatial distribution of neighboring vehicles
- domain assumption Steering dynamics and braking distances can be modeled sufficiently for reference-speed computation
Reference graph
Works this paper leans on
-
[1]
On the road safety benefits of advanced driver assistance systems in different driving contexts,
L. Masello, G. Castignani, B. Sheehan, F. Murphy, and K. McDonnell, “On the road safety benefits of advanced driver assistance systems in different driving contexts,”Transportation research interdisciplinary perspectives, vol. 15, pp. 1–20, 2022
work page 2022
-
[2]
Rajamani,Vehicle dynamics and control
R. Rajamani,Vehicle dynamics and control. Springer Science & Business Media, 2012
work page 2012
-
[3]
Unified framework for over-damped string stable adaptive cruise control systems,
P. Khound, P. Will, A. Tordeux, and F. Gronwald, “Unified framework for over-damped string stable adaptive cruise control systems,”Trans- portation research part C: emerging technologies, vol. 148, pp. 1–24, 2023
work page 2023
-
[4]
Flexible car–following mod- els for mixed traffic and weak lane–discipline conditions,
V . Papathanasopoulou and C. Antoniou, “Flexible car–following mod- els for mixed traffic and weak lane–discipline conditions,”European transport research review, vol. 10, no. 2, p. 62, 2018
work page 2018
-
[5]
A microscopic model for lane-less traffic,
A. K. Mulla, A. Joshi, R. Chavan, D. Chakraborty, and D. Manjunath, “A microscopic model for lane-less traffic,”IEEE Transactions on Control of Network Systems, vol. 6, no. 1, pp. 415–428, 2019
work page 2019
-
[6]
Critical reasons for crashes investigated in the national motor vehicle crash causation survey,
S. Singh, “Critical reasons for crashes investigated in the national motor vehicle crash causation survey,” Tech. Rep., 2015
work page 2015
-
[7]
Lane-free artificial-fluid concept for vehicular traffic,
M. Papageorgiou, K.-S. Mountakis, I. Karafyllis, I. Papamichail, and Y . Wang, “Lane-free artificial-fluid concept for vehicular traffic,”Pro- ceedings of the IEEE, vol. 109, no. 2, pp. 114–121, 2021
work page 2021
-
[8]
Effect of response time distribution in weak lane discipline on linear stability,
A. Nagahama, A. Tomoeda, and T. Wada, “Effect of response time distribution in weak lane discipline on linear stability,”Collective Dynamics, vol. 10, pp. 1–32, 2025
work page 2025
-
[9]
M. Tobisawa, K. Matsuda, T. Suzuki, T. Harada, J. Hoshino, Y . Itoh, K. Kumagae, J. Matsuoka, and K. Hattori, “Reinforcement learning- based autonomous driving control for efficient road utilization in lane- less environments,”Artificial Life and Robotics, vol. 30, no. 2, pp. 276– 288, 2025
work page 2025
-
[10]
Overtaking decision modeling in heterogeneous, weak lane discipline traffic,
A. K. Budhkar and A. K. Maurya, “Overtaking decision modeling in heterogeneous, weak lane discipline traffic,”Journal of the Eastern Asia Society for Transportation Studies, vol. 12, pp. 1740–1754, 2017
work page 2017
-
[11]
A vehicle detection technique using binary images for heterogeneous and lane-less traffic,
G. Satyanarayana, S. Majhi, and S. K. Das, “A vehicle detection technique using binary images for heterogeneous and lane-less traffic,” IEEE Transactions on Instrumentation and Measurement, vol. 70, pp. 1–14, 2021
work page 2021
-
[12]
V . Freire and X. Xu, “Optimal control for kinematic bicycle model with continuous-time safety guarantees: A sequential second-order cone programming approach,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 11 681–11 688, 2022
work page 2022
-
[13]
Sliding mode control for robust path tracking of automated vehicles in rural environments,
J. Matute, S. Diaz, and A. Karimoddini, “Sliding mode control for robust path tracking of automated vehicles in rural environments,”IEEE Open Journal of Vehicular Technology, 2024
work page 2024
-
[14]
Q. Chen, S. Wang, B. Gao, Z. Zhan, and R. Zhong, “Robust longitudinal and lateral control for mixed-vehicular platoons with string stability guarantees,”Nonlinear Dynamics, pp. 1–23, 2025
work page 2025
-
[15]
Accurately computing the log-sum-exp and softmax functions,
P. Blanchard, D. J. Higham, and N. J. Higham, “Accurately computing the log-sum-exp and softmax functions,”IMA Journal of Numerical Analysis, vol. 41, no. 4, pp. 2311–2330, 2021
work page 2021
-
[16]
Standards for passenger comfort in automated vehicles: Acceleration and jerk,
K. N. De Winkel, T. Irmak, R. Happee, and B. Shyrokau, “Standards for passenger comfort in automated vehicles: Acceleration and jerk,” Applied Ergonomics, vol. 106, pp. 1–9, 2023
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.