Homotopy-Guided Potential Games for Congestion-Aware Navigation
Pith reviewed 2026-05-10 12:59 UTC · model grok-4.3
The pith
Homotopy classes as strategy sets in potential games let agents avoid congested equilibria in multi-agent navigation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Homotopy classes serve as structured strategy sets inside a receding-horizon potential game: a deterministic planner produces topologically distinct paths conditioned on the current joint state, a heuristic retains the top-K most suitable congestion-free joint strategies, and the game then computes a generalized open-loop Nash equilibrium that respects homotopy consistency and adds costs for abrupt strategy switches between horizons.
What carries the argument
Homotopy-guided potential game, in which homotopy classes act as the discrete strategy sets for the game after heuristic top-K filtering.
If this is right
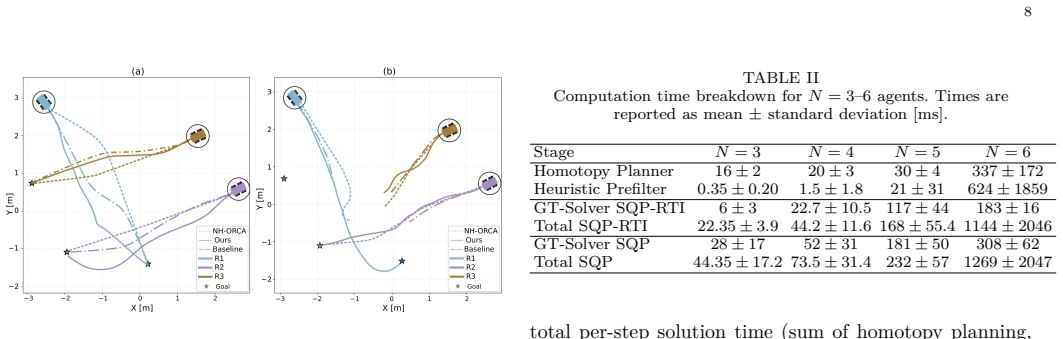
- Three-agent simulations reach goals faster with larger minimum distances between agents than either a local planner or NH-ORCA.
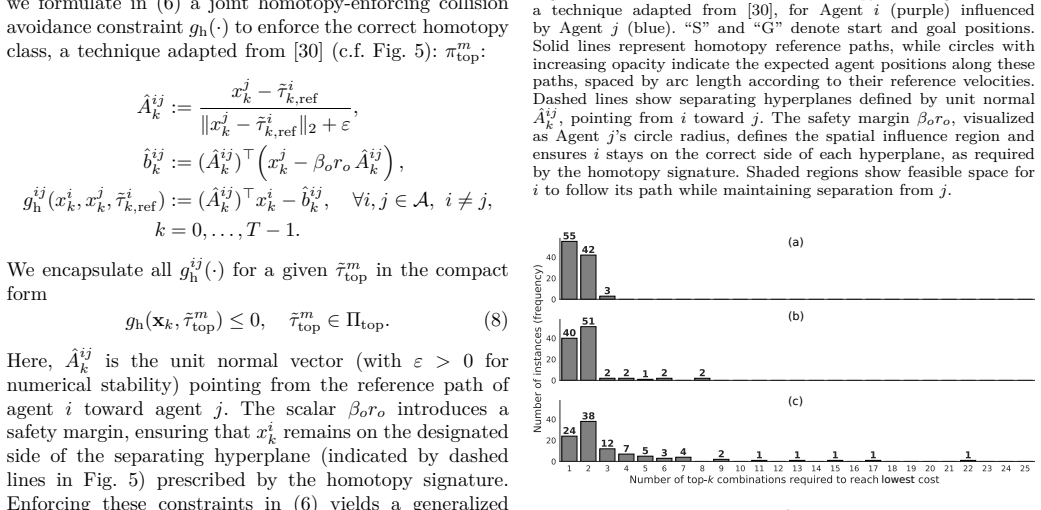
- The filtered homotopy sets remain small enough for real-time receding-horizon solution while still capturing alternate routes around congestion.
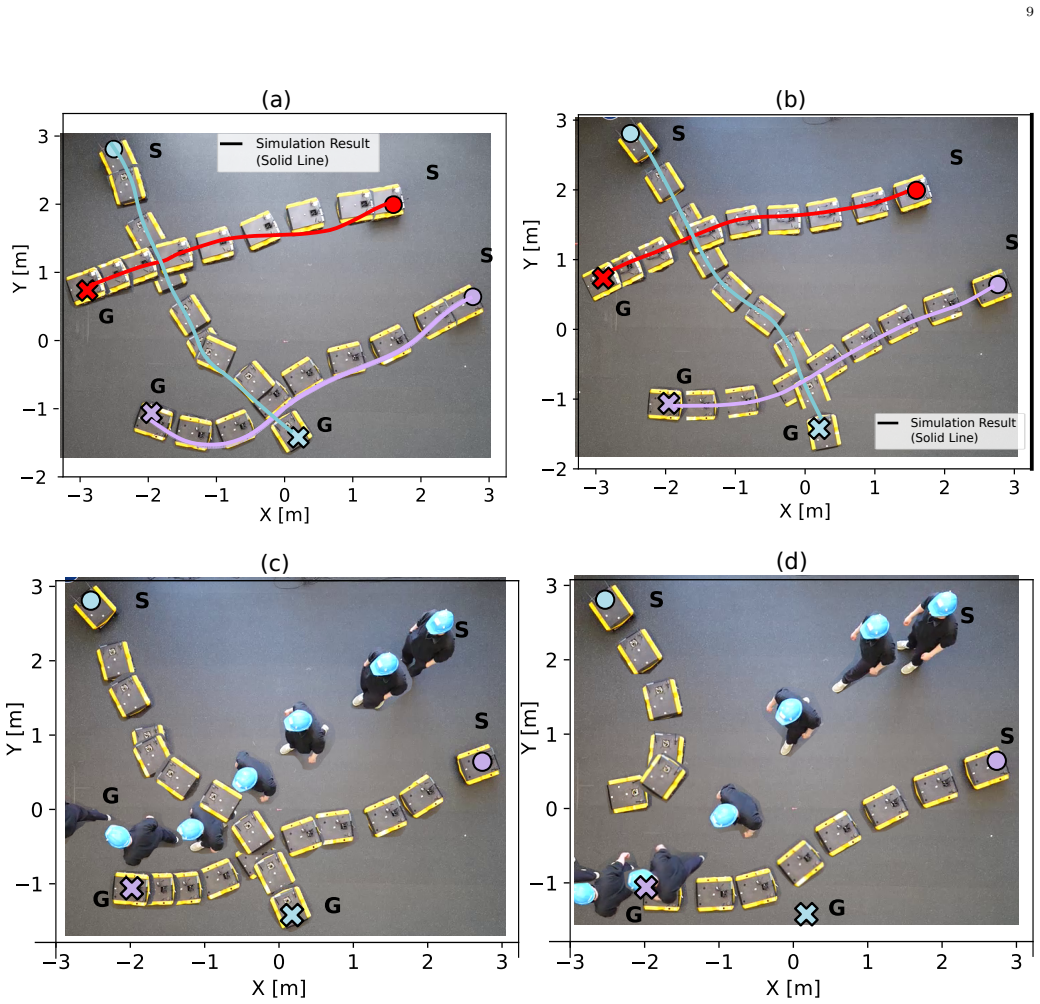
- Hardware experiments with two robots and one human show the planner switches to feasible alternate equilibria when the human acts irrationally, whereas the baseline game without homotopies fails to adapt.
- Penalties on strategy changes between horizons keep the sequence of equilibria temporally consistent without sacrificing safety or efficiency.
Where Pith is reading between the lines
- If the top-K filter reliably preserves near-optimal equilibria, the same structure could scale to modestly larger agent teams without exponential growth in computation.
- The method's ability to maintain multiple topological options may prove useful in environments with moving obstacles whose future paths are uncertain.
- Because the game is formulated over homotopy classes rather than continuous trajectories, it might combine with sampling-based planners that already enumerate homotopy classes.
Load-bearing premise
The heuristic that selects only a top-K subset of congestion-free joint strategies never excludes a better equilibrium or introduces bias into the subsequent game computation.
What would settle it
A simulation or hardware trial in which the top-K filter removes the globally best non-congested joint strategy that the full set of homotopies would have found, or a case where the method fails to switch equilibria when a human deviates from rational play.
Figures

read the original abstract
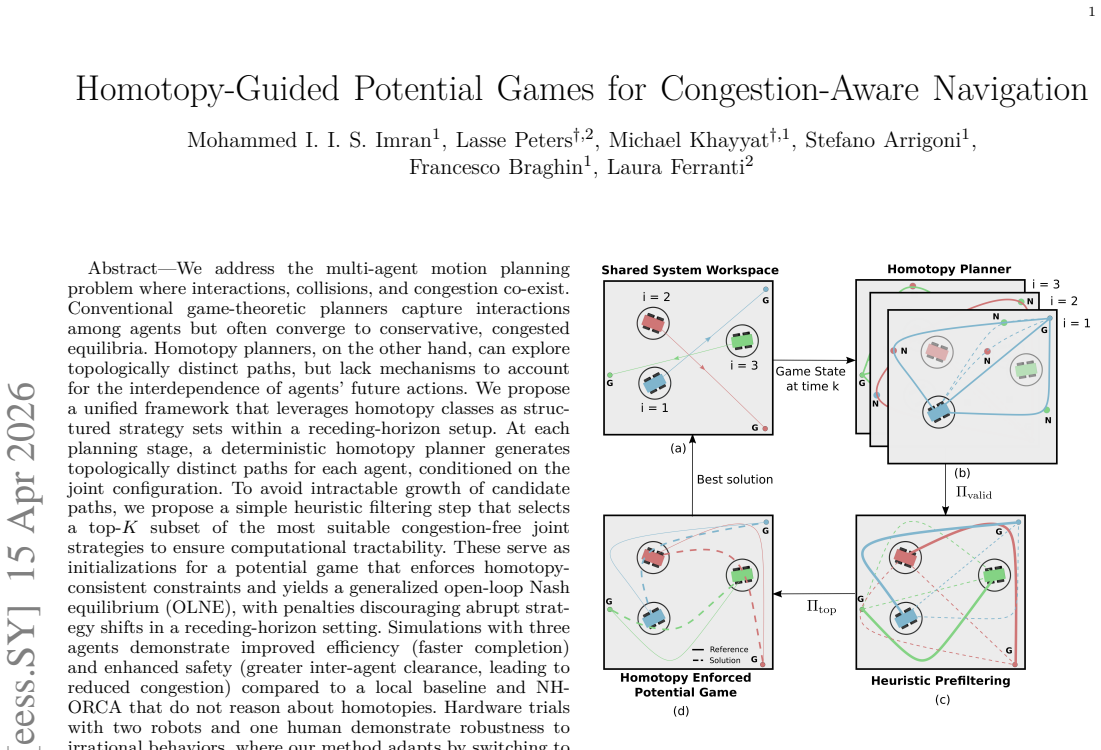
We address the multi-agent motion planning problem where interactions, collisions, and congestion co-exist. Conventional game-theoretic planners capture interactions among agents but often converge to conservative, congested equilibria. Homotopy planners, on the other hand, can explore topologically distinct paths, but lack mechanisms to account for the interdependence of agents' future actions. We propose a unified framework that leverages homotopy classes as structured strategy sets within a receding-horizon setup. At each planning stage, a deterministic homotopy planner generates topologically distinct paths for each agent, conditioned on the joint configuration. To avoid intractable growth of candidate paths, we propose a simple heuristic filtering step that selects a top-$K$ subset of the most suitable congestion-free joint strategies to ensure computational tractability. These serve as initializations for a potential game that enforces homotopy-consistent constraints and yields a generalized open-loop Nash equilibrium (OLNE), with penalties discouraging abrupt strategy shifts in a receding-horizon setting. Simulations with three agents demonstrate improved efficiency (faster completion) and enhanced safety (greater inter-agent clearance, leading to reduced congestion) compared to a local baseline and NH-ORCA that do not reason about homotopies. Hardware trials with two robots and one human demonstrate robustness to irrational behaviors, where our method adapts by switching to alternative feasible equilibria while the baseline game fails.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a unified framework for multi-agent motion planning that integrates homotopy classes as structured strategy sets into a potential game within a receding-horizon setup. A deterministic homotopy planner generates topologically distinct paths conditioned on joint configurations; a heuristic filters these to a top-K subset of congestion-free joint strategies for tractability; these initialize a potential game yielding a homotopy-consistent generalized open-loop Nash equilibrium (OLNE) with penalties for abrupt shifts. Simulations with three agents and hardware trials with two robots plus one human are reported to show faster completion times and greater inter-agent clearance compared to a local baseline and NH-ORCA.
Significance. If the central claims hold, the work could meaningfully advance congestion-aware navigation by combining topological exploration with game-theoretic equilibrium selection, addressing limitations of pure homotopy or game-theoretic planners. The constructive use of established homotopy computation and potential-game equilibria is a strength, as is the hardware demonstration of robustness to irrational human behavior. The result would be more impactful with stronger validation that the heuristic does not bias outcomes.
major comments (1)
- The central claim—that homotopy-guided potential games yield faster completion and greater inter-agent clearance than non-homotopy baselines—depends on the filtered top-K subset containing equilibria at least as good as those reachable without filtering. The abstract and method describe a 'simple heuristic filtering step' that selects 'the most suitable congestion-free joint strategies' before the potential game computes the OLNE, but no analysis, completeness guarantees, or sensitivity study is provided on whether the heuristic (e.g., via its congestion metric or ranking) systematically excludes superior homotopy combinations. This is load-bearing, as early filtering choices propagate in the receding-horizon loop and could make reported gains artifacts of the selection rule rather than the homotopy-potential-game construction.
minor comments (2)
- Abstract: the reported positive outcomes in simulations and hardware trials are stated without quantitative metrics (e.g., specific completion times, clearance distances), error analysis, statistical details, or full experimental setup, which weakens the ability to assess the magnitude and reliability of the improvements.
- Notation and presentation: the term 'generalized open-loop Nash equilibrium (OLNE)' is introduced without a clear definition or reference to its precise formulation relative to standard OLNE; adding an equation or short derivation would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive review and for noting the framework's potential to advance congestion-aware navigation through the integration of homotopy classes and potential games, as well as the hardware demonstration. We address the major comment below and will revise the manuscript to incorporate additional analysis.
read point-by-point responses
-
Referee: The central claim—that homotopy-guided potential games yield faster completion and greater inter-agent clearance than non-homotopy baselines—depends on the filtered top-K subset containing equilibria at least as good as those reachable without filtering. The abstract and method describe a 'simple heuristic filtering step' that selects 'the most suitable congestion-free joint strategies' before the potential game computes the OLNE, but no analysis, completeness guarantees, or sensitivity study is provided on whether the heuristic (e.g., via its congestion metric or ranking) systematically excludes superior homotopy combinations. This is load-bearing, as early filtering choices propagate in the receding-horizon loop and could make reported gains artifacts of the selection rule rather than the homotopy-potential-game construction.
Authors: We agree that the absence of analysis or sensitivity study on the heuristic filtering step is a limitation of the current manuscript. The heuristic is presented as a practical mechanism to ensure tractability by retaining only congestion-free joint strategies from the combinatorially large set generated by the deterministic homotopy planner; it does not claim to preserve all globally optimal combinations. The potential game then optimizes within this reduced set, and the receding-horizon replanning provides opportunities to recover from suboptimal early choices. Nevertheless, without explicit validation, it remains possible that the reported gains partly reflect the specific filtering rule. In the revised manuscript we will add a dedicated subsection containing a sensitivity study on the choice of K and the congestion-ranking metric, together with an explicit discussion of the heuristic's design rationale and its limitations. revision: yes
Circularity Check
No significant circularity in the derivation chain
full rationale
The paper describes a constructive pipeline: deterministic homotopy generation of topologically distinct paths, followed by a heuristic top-K filter for tractability, then a potential game to compute OLNE equilibria with homotopy constraints and receding-horizon penalties. These steps rely on established external techniques for homotopy classes and potential games rather than defining outcomes in terms of themselves or fitting parameters to the target metrics. No equations or claims reduce a prediction to its inputs by construction, and the reported simulation/hardware gains are presented as empirical comparisons against non-homotopy baselines. The framework remains self-contained against external benchmarks without load-bearing self-citations or self-definitional loops.
Axiom & Free-Parameter Ledger
free parameters (1)
- K
axioms (2)
- domain assumption Deterministic computation of topologically distinct paths is possible from joint agent configurations.
- domain assumption A potential game can be formulated to produce a generalized open-loop Nash equilibrium under homotopy-consistent constraints.
Reference graph
Works this paper leans on
-
[1]
Optimal reciprocal collision avoidance for multiple non-holonomic robots,
J. Alonso-Mora, A. Breitenmoser, M. Rufli, P. A. Beardsley, and R. Y. Siegwart, “Optimal reciprocal collision avoidance for multiple non-holonomic robots,” in International Symposium on Distributed Autonomous Robotic Systems, 2010
work page 2010
-
[2]
A distributed multi-vehicle coordination algorithm for naviga- tion in tight environments,
R. Firoozi, L. Ferranti, X. Zhang, S. Nejadnik, and F. Borrelli, “A distributed multi-vehicle coordination algorithm for naviga- tion in tight environments,” IEEE Transactions on Vehicular Technology, 2024
work page 2024
-
[3]
Social lstm: Human trajectory prediction in crowded spaces,
A. Alahi, K. Goel, V. Ramanathan, A. Robicquet, L. Fei-Fei, and S. Savarese, “Social lstm: Human trajectory prediction in crowded spaces,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 961–971
work page 2016
-
[4]
Inference-based strategy alignment for general-sum differential games,
L. Peters, D. Fridovich-Keil, C. J. Tomlin, and Z. Sunberg, “Inference-based strategy alignment for general-sum differential games,” in Adaptive Agents and Multi-Agent Systems, 2020
work page 2020
-
[5]
T. Başar and G. J. Olsder, Dynamic noncooperative game theory. SIAM, 1998. 9 Simulation Result (Solid Line) (a) (b) Simulation Result (Solid Line) (c) (d) Fig. 8. Hardware validation results for our approach and the baseline game under rational and irrational settings for a three-player game (Agents R1, R2, R3), shown in light blue, light pink, and red. S...
work page 1998
-
[6]
Game theoretic motion planning for multi-robot racing,
Z. Wang, R. Spica, and M. Schwager, “Game theoretic motion planning for multi-robot racing,” in Distributed Autonomous Robotic Systems: The 14th International Symposium. Springer, 2019, pp. 225–238
work page 2019
-
[7]
Hierarchical game-theoretic planning for autonomous vehicles,
J. F. Fisac, E. Bronstein, E. Stefansson, D. Sadigh, S. S. Sastry, and A. D. Dragan, “Hierarchical game-theoretic planning for autonomous vehicles,” in 2019 International conference on robotics and automation (ICRA). IEEE, 2019, pp. 9590–9596
work page 2019
-
[8]
On the stackelberg strategy in nonzerosum games,
M. Simaan and J. B. Cruz, “On the stackelberg strategy in nonzerosum games,” Journal of Optimization Theory and Applications, vol. 11, no. 5, pp. 533–555, 1973
work page 1973
-
[9]
K. Leyton-Brown and Y. Shoham, Essentials of game theory: A concise multidisciplinary introduction. Springer Nature, 2022
work page 2022
-
[10]
Generalized Nash equilibrium Problems,
F. Facchinei and C. Kanzow, “Generalized Nash equilibrium Problems,” Annals of Operations Research, vol. 175, no. 1, pp. 177–211, 2010
work page 2010
-
[11]
D. Monderer and L. S. Shapley, “Potential games,” Games and economic behavior, vol. 14, no. 1, pp. 124–143, 1996
work page 1996
-
[12]
New complexity results about nash equilibria,
V. Conitzer and T. Sandholm, “New complexity results about nash equilibria,” Games and Economic Behavior, vol. 63, no. 2, pp. 621–641, 2008
work page 2008
-
[13]
J. Li, C.-Y. Chiu, L. Peters, S. Sojoudi, C. J. Tomlin, and D. Fridovich-Keil, “Cost inference for feedback dynamic games from noisy partial state observations and incomplete trajec- tories,” in Proceedings of the 22nd International Conference on Autonomous Agents and MultiAgent Systems (AAMAS). IF AAMAS, 2023, pp. 1062–1070
work page 2023
-
[14]
Factorization of Dynamic Games over Spatio-Temporal Resources,
A. Zanardi, S. Bolognani, A. Censi, F. Dorfler, and E. Fraz- zoli, “Factorization of Dynamic Games over Spatio-Temporal Resources,” in 2022 IEEE/RSJ International Conference on 10 Intelligent Robots and Systems (IROS), 2022, pp. 13 159–13 166
work page 2022
-
[15]
Winding through: Crowd navigation via topological invariance,
C. Mavrogiannis, K. Balasubramanian, S. Poddar, A. Gandra, and S. S. Srinivasa, “Winding through: Crowd navigation via topological invariance,” IEEE Robot. Autom. Lett., vol. 8, no. 1, pp. 121–128, 2022
work page 2022
-
[16]
Data-driven topological motion planning with persistent cohomology
F. T. Pokorny and D. Kragic, “Data-driven topological motion planning with persistent cohomology. ” in Robotics: Science and Systems, 2015
work page 2015
-
[17]
Interactive joint planning for autonomous vehicles,
Y. Chen, S. Veer, P. Karkus, and M. Pavone, “Interactive joint planning for autonomous vehicles,” IEEE Robot. Autom. Lett., 2023
work page 2023
-
[18]
Topological constraints in search-based robot path planning,
S. Bhattacharya, M. Likhachev, and V. Kumar, “Topological constraints in search-based robot path planning,” Autonomous Robots, vol. 33, pp. 273–290, 2012
work page 2012
-
[19]
Topological invariants in braid theory,
M. A. Berger, “Topological invariants in braid theory,” Letters in Mathematical Physics, vol. 55, pp. 181–192, 2001
work page 2001
-
[20]
Decentralized multi- agent navigation planning with braids,
C. I. Mavrogiannis and R. A. Knepper, “Decentralized multi- agent navigation planning with braids,” in Algorithmic Foun- dations of Robotics XII: Proceedings of the Twelfth Workshop on the Algorithmic Foundations of Robotics. Springer, 2020, pp. 880–895
work page 2020
-
[21]
A distributed protocol for motion coordination in free-range vehicular systems,
E. Roszkowska and S. A. Reveliotis, “A distributed protocol for motion coordination in free-range vehicular systems,” IF AC Proceedings Volumes, vol. 44, no. 1, pp. 9530–9536, 2011
work page 2011
-
[22]
M. Nezami, N. T. Nguyen, and G. Schildbach, “Global tra- jectory optimization for autonomous driving using nonlinear programming with topology classes,” in 2024 IEEE 20th Inter- national Conference on Automation Science and Engineering (CASE). IEEE, 2024, pp. 2237–2242
work page 2024
-
[23]
Tac- tical game-theoretic decision-making with homotopy class con- straints,
M. Khayyat, A. Zanardi, S. Arrigoni, and F. Braghin, “Tac- tical game-theoretic decision-making with homotopy class con- straints,” IEEE Trans. Intell. Veh., vol. 10, pp. 3916–3930, 2024
work page 2024
-
[24]
Algorithms for generalized potential games with mixed-integer variables,
S. Sagratella, “Algorithms for generalized potential games with mixed-integer variables,” Computational Optimization and Ap- plications, vol. 68, no. 3, pp. 689–717, 2017
work page 2017
-
[25]
Refinements of nash equilibrium in potential games,
O. Carbonell-Nicolau and R. P. McLean, “Refinements of nash equilibrium in potential games,” Theoretical Economics, vol. 9, no. 3, pp. 555–582, 2014
work page 2014
-
[26]
Local non-cooperative games with principled player selection for scalable motion planning,
M. Chahine, R. Firoozi, W. Xiao, M. Schwager, and D. Rus, “Local non-cooperative games with principled player selection for scalable motion planning,” in 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 880–887
work page 2023
-
[27]
Prob- abilistic roadmaps for path planning in high-dimensional con- figuration spaces,
L. Kavraki, P. Svestka, J. Latombe, and M. Overmars, “Prob- abilistic roadmaps for path planning in high-dimensional con- figuration spaces,” IEEE J. Robot. Autom., vol. 12, pp. 566 – 580, 09 1996
work page 1996
-
[28]
Sampling-based algorithms for op- timal motion planning,
S. Karaman and E. Frazzoli, “Sampling-based algorithms for op- timal motion planning,” The International Journal of Robotics Research, vol. 30, no. 7, pp. 846–894, 2011
work page 2011
- [29]
-
[30]
Topology-driven parallel trajectory optimization in dynamic environments,
O. De Groot, L. Ferranti, D. M. Gavrila, and J. Alonso-Mora, “Topology-driven parallel trajectory optimization in dynamic environments,” IEEE Trans. Robot., 2024
work page 2024
-
[31]
acados – a modular open-source framework for fast embedded optimal control,
R. Verschueren, G. Frison, D. Kouzoupis, J. Frey, N. van Duijkeren, A. Zanelli, B. Novoselnik, T. Albin, R. Quirynen, and M. Diehl, “acados – a modular open-source framework for fast embedded optimal control,” Mathematical Programming Computation, 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.