Towards Optimal Passive Feedback Control of LTI Systems under LQR Performance
Pith reviewed 2026-05-10 11:05 UTC · model grok-4.3
The pith
Feedback gains for LTI systems can be chosen to ensure passivity while minimizing LQR cost by inner-approximating the passivating set with a convex polytope and running projected gradient flow inside it.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The set of passivating feedback gains is unbounded, possibly nonconvex, path-connected and contractible; this set can be inner-approximated by a compact convex polytope inside which a projected gradient flow finds a gain that minimizes the LQR cost.
What carries the argument
Inner approximation of the passivating-gain set by a compact convex polytope, followed by projected gradient flow to minimize the LQR cost inside the polytope.
If this is right
- Passivity constraints can be handled indirectly without solving the original bilinear matrix inequalities.
- The projected gradient flow stays inside the polytope and therefore produces a gain that is guaranteed to be passivating.
- The method applies to any LTI system for which a suitable inner polytope can be constructed from the passivity LMI.
- Numerical examples demonstrate that the computed gains achieve closed-loop passivity together with low LQR cost.
Where Pith is reading between the lines
- The same polytope-plus-gradient approach could be tried with other convex performance indices besides LQR, provided the index remains convex on the polytope.
- If the polytope is chosen adaptively rather than fixed in advance, the gap between the approximated and true optimum might be reduced without losing convexity.
- The contractibility of the true passivating set suggests that homotopy methods could be used to enlarge the polytope on the fly while preserving feasibility.
Load-bearing premise
A compact convex polytope can be chosen that lies entirely inside the possibly nonconvex set of passivating gains and still contains a point whose LQR cost is close to the global minimum.
What would settle it
A concrete LTI system and external port for which every gain inside the chosen polytope either fails to render the closed loop passive or produces an LQR cost more than 20 percent higher than the lowest cost achievable by any passivating gain.
Figures





read the original abstract
We study state-feedback design for continuous-time LTI systems with a control input and an external input-output pair. Our objective is to determine feedback gains that render the closed-loop system (strictly) passive with respect to the external port while minimizing the standard LQR cost in the disturbance-free case. The resulting constrained optimization problem is intractable due to bilinear matrix inequalities. We analyze the set of passivating gains, showing it is unbounded, possibly nonconvex, path-connected, and contractible. We propose an indirect approach, in which the set of passivating feedback gains is inner-approximated by a compact, convex polytope. A projected gradient flow is employed to compute a gain within this polytope that minimizes the LQR cost. Numerical examples illustrate the effectiveness of the method.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript studies state-feedback design for continuous-time LTI systems to render the closed-loop system (strictly) passive w.r.t. an external I/O port while minimizing the standard LQR cost in the disturbance-free case. It establishes that the set of passivating gains is unbounded, possibly nonconvex, path-connected, and contractible. Because the direct formulation leads to intractable bilinear matrix inequalities, the authors propose an indirect method that inner-approximates the passivating set by a compact convex polytope and applies projected gradient flow to minimize the LQR cost inside this polytope. Numerical examples are provided to illustrate the procedure.
Significance. If the polytope can be chosen so that its LQR-optimal point remains close to the true constrained optimum and the flow reliably locates a high-quality stationary point, the method supplies a practical computational route for jointly enforcing passivity and LQR performance. The geometric characterization of the passivating gain set (unboundedness, path-connectedness, contractibility) is a clear contribution to the literature on passivity constraints. The explicit algorithmic construction via projected gradient flow on a convex set is concrete and reproducible from the description.
major comments (2)
- [Abstract / indirect approach] Abstract and the description of the indirect approach: the set of passivating gains is shown to be possibly nonconvex, so any compact convex polytope necessarily excludes feasible gains. No explicit construction of the polytope (e.g., via vertex enumeration or facet description) nor any quantitative guarantee (Hausdorff distance, volume ratio, or suboptimality bound on J(K_poly) - min J(K)) is supplied to ensure the retained point remains useful for the original constrained problem.
- [Projected gradient flow] Description of the projected gradient flow: the LQR cost J(K) is a non-convex function of the gain (the Riccati/Lyapunov solution depends quadratically on K). Projected gradient flow over a convex set is guaranteed only to reach a stationary point; the manuscript provides no argument ruling out multiple distinct stationary values with materially different costs, nor any mechanism (e.g., multi-start, second-order test, or global-optimization subroutine) to identify the best point inside the polytope.
minor comments (2)
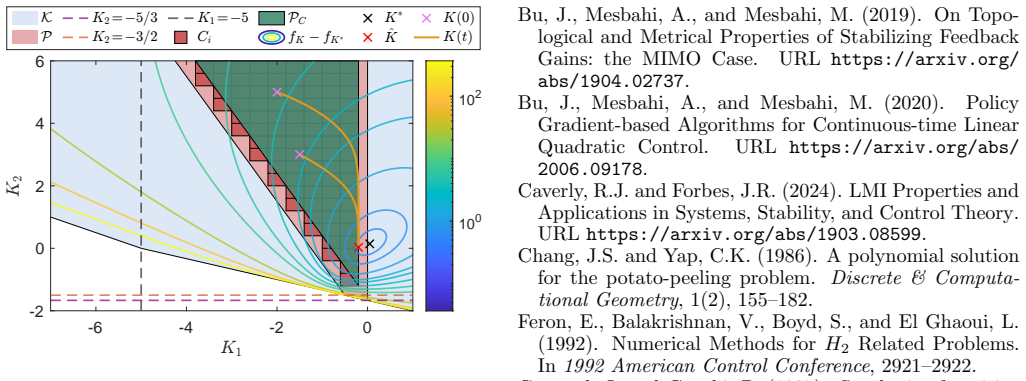
- [Numerical examples] Numerical examples: the reported trajectories would be more informative if the polytope boundaries were overlaid on the gain space plots and if the achieved LQR cost were compared against the unconstrained LQR optimum (when feasible) or against a simple outer bound.
- [Preliminaries] Notation: the distinction between strict passivity and passivity is used throughout but the precise matrix inequality (e.g., the strict version of the KYP lemma) is not restated in the main text; a short reminder equation would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive evaluation of the geometric properties and algorithmic approach. We address each major comment below, acknowledging the limitations identified and outlining the revisions we will make to clarify these points without overstating the method's guarantees.
read point-by-point responses
-
Referee: [Abstract / indirect approach] Abstract and the description of the indirect approach: the set of passivating gains is shown to be possibly nonconvex, so any compact convex polytope necessarily excludes feasible gains. No explicit construction of the polytope (e.g., via vertex enumeration or facet description) nor any quantitative guarantee (Hausdorff distance, volume ratio, or suboptimality bound on J(K_poly) - min J(K)) is supplied to ensure the retained point remains useful for the original constrained problem.
Authors: We agree that the possible nonconvexity of the passivating gain set means any convex inner approximation necessarily excludes some feasible gains. The manuscript describes the polytope as the convex hull of a finite collection of passivating gains chosen to satisfy the strict passivity LMI, but does not supply a general vertex-enumeration algorithm or facet description. Deriving a priori quantitative guarantees such as Hausdorff distance or suboptimality bounds is difficult in the absence of additional structural assumptions on the system, given the nonconvexity. In the revision we will expand the polytope-construction description with explicit details on vertex selection used in the examples, add a remark on the approximation's practical performance as observed numerically, and include a dedicated paragraph noting the lack of general bounds as a limitation of the indirect method. revision: partial
-
Referee: [Projected gradient flow] Description of the projected gradient flow: the LQR cost J(K) is a non-convex function of the gain (the Riccati/Lyapunov solution depends quadratically on K). Projected gradient flow over a convex set is guaranteed only to reach a stationary point; the manuscript provides no argument ruling out multiple distinct stationary values with materially different costs, nor any mechanism (e.g., multi-start, second-order test, or global-optimization subroutine) to identify the best point inside the polytope.
Authors: We concur that J(K) is non-convex in K because the Lyapunov solution depends quadratically on the gain, so projected gradient flow is guaranteed only to reach a stationary point that need not be globally optimal inside the polytope. The manuscript contains no analysis ruling out multiple stationary points with substantially different costs and no built-in mechanisms such as multi-start. In the revised manuscript we will add a paragraph discussing the non-convexity of the objective and the possibility of distinct stationary values. We will also recommend and illustrate the practical use of multiple random initializations inside the polytope (feasible because the set is convex and compact), followed by selection of the lowest-cost stationary point obtained. revision: yes
Circularity Check
No circularity; derivation self-contained on standard LTI/LQR primitives
full rationale
The paper derives properties of the passivating gain set directly from LTI dynamics and passivity definitions, then proposes an inner polytope approximation followed by projected gradient flow on the standard LQR cost. No equation or claim reduces to a self-definition, a fitted input relabeled as prediction, or a load-bearing self-citation chain. The central method rests on convex optimization primitives and the known nonconvexity of the feasible set, without any quantity being defined circularly in terms of its own output or a prior result by the same authors that itself lacks independent verification.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The closed-loop system is linear time-invariant and the passivity and LQR cost are defined via standard quadratic forms and storage functions.
Reference graph
Works this paper leans on
-
[1]
Balakrishnan, V. and Vandenberghe, L. (1995). Connec- tions Between Duality in Control Theory and Convex Optimization. InProceedings of 1995 American Control Conference, volume 6, 4030–4034
work page 1995
-
[2]
(2020).Dissipative Systems Analysis and Control
Brogliato, B., Lozano, R., Maschke, B., and Egeland, O. (2020).Dissipative Systems Analysis and Control
work page 2020
-
[3]
Bu, J., Mesbahi, A., and Mesbahi, M. (2019). On Topo- logical and Metrical Properties of Stabilizing Feedback Gains: the MIMO Case. URLhttps://arxiv.org/ abs/1904.02737
work page Pith review arXiv 2019
- [4]
-
[5]
Caverly, R.J. and Forbes, J.R. (2024). LMI Properties and Applications in Systems, Stability, and Control Theory. URLhttps://arxiv.org/abs/1903.08599
-
[6]
Chang, J.S. and Yap, C.K. (1986). A polynomial solution for the potato-peeling problem.Discrete & Computa- tional Geometry, 1(2), 155–182
work page 1986
-
[7]
Feron, E., Balakrishnan, V., Boyd, S., and El Ghaoui, L. (1992). Numerical Methods forH 2 Related Problems. In1992 American Control Conference, 2921–2922
work page 1992
-
[8]
Geromel, J. and Gapski, P. (1997). Synthesis of positive realH 2 controllers.IEEE Transactions on Automatic Control, 42(7), 988–992
work page 1997
-
[9]
Haddad, W., Bernstein, D., and Wang, Y. (1994). Dissipa- tiveH 2 /H ∞ controller synthesis.IEEE Transactions on Automatic Control, 39(4), 827–831
work page 1994
-
[10]
Hallinan, L., Watson, J.D., and Lestas, I. (2025). Inverse Optimal Control for Passive Network Systems.IEEE Trans. Autom. Control, 70(10), 6969–6976
work page 2025
-
[11]
Horn, R.A. and Johnson, C.R. (2012).Matrix Analysis. Cambridge University Press, 2 edition
work page 2012
-
[12]
Jongen, H.T. and Stein, O. (2003). Constrained global optimization: Adaptive gradient flows. InFrontiers in Global Optimization, volume 74, 223–236. Springer
work page 2003
-
[13]
Khalil, H.K. (2002).Nonlinear Systems. Prentice Hall, Upper Saddle River, N.J., 3 edition. L¨ ofberg, J. (2012). Automatic robust convex program- ming.Optim. Methods Softw., 27(1), 115–129
work page 2002
-
[14]
Lozano-Leal, R. and Joshi, S. (1988). On the design of the dissipative LQG-type controllers. InProc. IEEE Conf. Decis. Control, volume 2, 1645–1646
work page 1988
-
[15]
Madeira, D.d.S. and Adamy, J. (2016). On the Equivalence Between Strict Positive Realness and Strict Passivity of Linear Systems.IEEE Transactions on Automatic Control, 61(10), 3091–3095
work page 2016
-
[16]
Peaucelle, D., Fradkov, A., and Andrievsky, B. (2005). Ro- bust passification via static output feedback-lmi results. IF AC Proceedings Volumes, 38(1), 820–825
work page 2005
-
[17]
Shimomura, T. and Pullen, S.P. (2002). Strictly positive realH 2 controller synthesis via iterative algorithms for convex optimization.Journal of guidance, control, and dynamics, 25(6), 1003–1011
work page 2002
-
[18]
Su, L., Gupta, V., and Antsaklis, P. (2020). Feedback passivation of linear systems with fixed-structure con- trollers.IEEE Control Systems Letters, 4(2), 498–503
work page 2020
-
[19]
Sun, W., Khargonekar, P., and Shim, D. (1994). Solution to the positive real control problem for linear time- invariant systems.IEEE Trans. Autom. Control, 39(10), 2034–2046
work page 1994
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.