NeuroMesh: A Unified Neural Inference Framework for Decentralized Multi-Robot Collaboration
Pith reviewed 2026-05-10 10:22 UTC · model grok-4.3
The pith
NeuroMesh standardizes observation encoding, message passing, aggregation, and task decoding into one pipeline for decentralized neural inference on heterogeneous robot teams.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
NeuroMesh is a multi-domain, cross-platform, modular framework that standardizes observation encoding, message passing, aggregation, and task decoding in a unified pipeline, combining a dual-aggregation paradigm for reduction- and broadcast-based information fusion with a parallelized architecture that decouples cycle time from end-to-end latency, and it delivers a high-performance C++ implementation with Zenoh communication and hybrid GPU/CPU inference that operates robustly on heterogeneous aerial and ground robot teams for tasks including collaborative perception, decentralized control, and task assignment.
What carries the argument
The dual-aggregation paradigm for reduction- and broadcast-based information fusion inside a parallelized architecture that separates per-cycle timing from full latency.
If this is right
- Heterogeneous teams of aerial and ground robots can run collaborative perception, decentralized control, and task assignment without custom per-robot inference stacks.
- Cycle time stays independent of end-to-end communication latency, supporting faster overall operation under varying network conditions.
- The same pipeline handles diverse task structures and payload sizes while using hybrid GPU/CPU resources.
- An open-source C++ implementation with Zenoh enables direct reuse across different robot hardware and communication setups.
Where Pith is reading between the lines
- The same standardization approach might allow teams to add new robot types mid-mission without re-engineering the inference code.
- Decoupling cycle time from latency could improve safety in time-critical tasks where robots must act before full information arrives.
- If the pipeline proves stable under real packet loss, it may reduce reliance on centralized servers for multi-robot learning deployments.
Load-bearing premise
Standardizing observation encoding, message passing, aggregation, and task decoding into one pipeline will generalize to arbitrary hardware differences and communication limits without needing per-deployment tuning or suffering from unmodeled network problems.
What would settle it
Deploying the framework on a new set of robots with previously untested sensor types and under measured increases in packet loss or delay, then checking whether inference accuracy and latency remain stable without any code or parameter changes.
Figures






read the original abstract
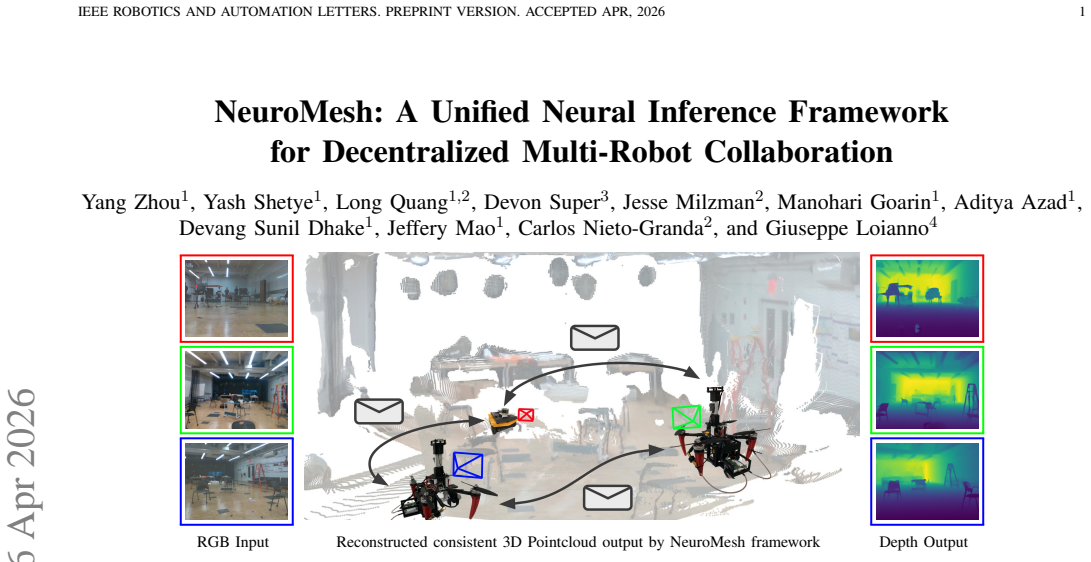
Deploying learned multi-robot models on heterogeneous robots remains challenging due to hardware heterogeneity, communication constraints, and the lack of a unified execution stack. This paper presents NeuroMesh, a multi-domain, cross-platform, and modular decentralized neural inference framework that standardizes observation encoding, message passing, aggregation, and task decoding in a unified pipeline. NeuroMesh combines a dual-aggregation paradigm for reduction- and broadcast-based information fusion with a parallelized architecture that decouples cycle time from end-to-end latency. Our high-performance C++ implementation leverages Zenoh for inter-robot communication and supports hybrid GPU/CPU inference. We validate NeuroMesh on a heterogeneous team of aerial and ground robots across collaborative perception, decentralized control, and task assignment, demonstrating robust operation across diverse task structures and payload sizes. We plan to release NeuroMesh as an open-source framework to the community.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces NeuroMesh, a multi-domain, cross-platform, modular decentralized neural inference framework for heterogeneous robot teams. It standardizes observation encoding, message passing, aggregation, and task decoding in a unified pipeline, employing a dual-aggregation paradigm for reduction- and broadcast-based fusion and a parallelized architecture to decouple cycle time from end-to-end latency. The C++ implementation uses Zenoh for communication and supports hybrid GPU/CPU inference. Validation is claimed on a heterogeneous team of aerial and ground robots for collaborative perception, decentralized control, and task assignment across diverse task structures and payload sizes, with plans for open-source release.
Significance. If the experimental validation supports the claims, this work could be significant for the field of multi-robot systems by providing a practical, high-performance framework that addresses hardware heterogeneity and communication challenges in deploying neural models. The emphasis on modularity, standardization, and open-source availability would enable easier adoption and extension for various decentralized tasks, potentially advancing robust collaboration in real-world settings.
major comments (3)
- Abstract: The assertion of validation across tasks supplies no quantitative results, error bars, baseline comparisons, or details on how heterogeneity was handled; the central claim of robust decentralized inference therefore rests on an unexamined experimental section.
- Framework description: No equations, formal definitions, or analysis are presented for the dual-aggregation paradigm or the parallelized architecture that purportedly decouples cycle time from end-to-end latency, leaving the decoupling claim unsupported by derivation or measurement.
- Validation claims: The manuscript provides no evidence (e.g., measured latency under controlled bandwidth throttling or failure rates across untuned sensor/compute differences) that the standardized pipeline generalizes without per-deployment tuning or suffering from unmodeled network effects, which is load-bearing for the robustness assertion.
minor comments (2)
- The abstract could more precisely define 'robust operation' and 'diverse task structures' to clarify the scope of the claimed generalization.
- Consider including a system diagram or pseudocode for the dual-aggregation and parallelized pipeline to improve readability of the architectural contributions.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which identifies opportunities to strengthen the manuscript's clarity and evidentiary support. We address each major comment below and commit to revisions that directly respond to the concerns raised.
read point-by-point responses
-
Referee: Abstract: The assertion of validation across tasks supplies no quantitative results, error bars, baseline comparisons, or details on how heterogeneity was handled; the central claim of robust decentralized inference therefore rests on an unexamined experimental section.
Authors: We agree that the abstract is too high-level and omits key quantitative support. The experimental section reports latency, success rates, and comparisons across the three tasks on heterogeneous aerial-ground teams, with variability measures and architecture details for handling sensor/compute differences. We will revise the abstract to summarize representative quantitative results, including latency values, success rates, and heterogeneity-handling approach. revision: yes
-
Referee: Framework description: No equations, formal definitions, or analysis are presented for the dual-aggregation paradigm or the parallelized architecture that purportedly decouples cycle time from end-to-end latency, leaving the decoupling claim unsupported by derivation or measurement.
Authors: We acknowledge the absence of formalization. The manuscript describes the dual-aggregation and parallel architecture at a high level without equations or derivations. We will add mathematical definitions for the reduction and broadcast aggregation steps, a formal model of the parallel execution pipeline, and an analysis deriving the cycle-time decoupling property, supported by implementation measurements. revision: yes
-
Referee: Validation claims: The manuscript provides no evidence (e.g., measured latency under controlled bandwidth throttling or failure rates across untuned sensor/compute differences) that the standardized pipeline generalizes without per-deployment tuning or suffering from unmodeled network effects, which is load-bearing for the robustness assertion.
Authors: The current experiments demonstrate operation across diverse payloads and task structures on untuned heterogeneous hardware, but do not include the specific controlled bandwidth or untuned-difference tests referenced. We will expand the validation section with new measurements of latency under throttled bandwidth and consistency metrics across untuned configurations to directly support the generalization and robustness claims. revision: yes
Circularity Check
No circularity: framework description is self-contained with no equations or fitted predictions
full rationale
The paper describes a modular software framework (NeuroMesh) for decentralized neural inference on heterogeneous robots, standardizing encoding, message passing, aggregation, and decoding. No equations, parameters, or first-principles derivations are present in the provided text. Claims rest on direct architectural description plus empirical validation on aerial/ground robots rather than any reduction to self-referential definitions, fitted inputs renamed as predictions, or load-bearing self-citations. The dual-aggregation and parallelized architecture are presented as design choices, not derived results equivalent to their inputs by construction. This is the expected non-finding for a systems/framework paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Graph learning in robotics: A survey,
F. Pistilli and G. Averta, “Graph learning in robotics: A survey,”IEEE Access, vol. 11, pp. 112 664–112 681, 2023
work page 2023
-
[2]
State-of-the-art in robot learning for multi-robot collaboration: A comprehensive survey,
B. Wu and C. S. Suh, “State-of-the-art in robot learning for multi-robot collaboration: A comprehensive survey,”arXiv preprint arXiv:2408.11822, 2024
-
[3]
Multi-Robot Collabo- rative Perception With Graph Neural Networks,
Y . Zhou, J. Xiao, Y . Zhou, and G. Loianno, “Multi-Robot Collabo- rative Perception With Graph Neural Networks,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2289–2296, 2022
work page 2022
-
[4]
Multi-Robot Scene Completion: Towards Task-Agnostic Collaborative Perception,
Y . Li, J. Zhang, D. Ma, Y . Wang, and C. Feng, “Multi-Robot Scene Completion: Towards Task-Agnostic Collaborative Perception,” inProceedings of The 6th Conference on Robot Learning, ser. Proceedings of Machine Learning Research, K. Liu, D. Kulic, and J. Ichnowski, Eds., vol. 205. PMLR, Dec 2023, pp. 2062–2072
work page 2023
-
[5]
Learning Decentralized Controllers for Robot Swarms with Graph Neural Networks,
E. Tolstaya, F. Gama, J. Paulos, G. Pappas, V . Kumar, and A. Ribeiro, “Learning Decentralized Controllers for Robot Swarms with Graph Neural Networks,” inProceedings of the Conference on Robot Learn- ing, ser. Proceedings of Machine Learning Research, L. P. Kaelbling, D. Kragic, and K. Sugiura, Eds., vol. 100. PMLR, Oct 2020, pp. 671–682
work page 2020
-
[6]
Learning Decentralized Flocking Controllers with Spatio-Temporal Graph Neural Network,
S. Chen, Y . Sun, P. Li, L. Zhou, and C.-T. Lu, “Learning Decentralized Flocking Controllers with Spatio-Temporal Graph Neural Network,” in IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 2596–2602
work page 2024
-
[7]
Coverage Control in Multi-Robot Systems via Graph Neural Networks,
W. Gosrich, S. Mayya, R. Li, J. Paulos, M. Yim, A. Ribeiro, and V . Ku- mar, “Coverage Control in Multi-Robot Systems via Graph Neural Networks,” inInternational Conference on Robotics and Automation (ICRA), 2022, pp. 8787–8793
work page 2022
-
[8]
VGAI: End-to-End Learning of Vision-Based Decentralized Controllers for Robot Swarms,
T.-K. Hu, F. Gama, T. Chen, Z. Wang, A. Ribeiro, and B. M. Sadler, “VGAI: End-to-End Learning of Vision-Based Decentralized Controllers for Robot Swarms,” inIEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2021, pp. 4900– 4904
work page 2021
-
[9]
Graph Neural Networks for Decentralized Multi-Robot Path Planning,
Q. Li, F. Gama, A. Ribeiro, and A. Prorok, “Graph Neural Networks for Decentralized Multi-Robot Path Planning,” inIEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), 2020, pp. 11 785–11 792
work page 2020
-
[10]
Learning Heuristics for Efficient Environment Explo- ration Using Graph Neural Networks,
E. P. Herrera-Alarc ´on, G. Baris, M. Satler, C. A. Avizzano, and G. Loianno, “Learning Heuristics for Efficient Environment Explo- ration Using Graph Neural Networks,” in21st International Confer- ence on Advanced Robotics (ICAR), 2023, pp. 86–93
work page 2023
-
[11]
Graph Neural Networks for Multi-Robot Active Information Acquisition,
M. Tzes, N. Bousias, E. Chatzipantazis, and G. J. Pappas, “Graph Neural Networks for Multi-Robot Active Information Acquisition,” in IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 3497–3503
work page 2023
-
[12]
X. Ji, H. Li, Z. Pan, X. Gao, and C. Tu, “Decentralized, Unlabeled Multi-Agent Navigation in Obstacle-Rich Environments using Graph Neural Networks,” inIEEE/RSJ International Conference on Intelli- gent Robots and Systems (IROS), 2021, pp. 8936–8943
work page 2021
-
[13]
Towards Learning-Based Distributed Task Allocation Approach for Multi-Robot System,
Z. Chekakta, N. Aouf, S. Govindaraj, F. Polisano, and G. De Cubber, “Towards Learning-Based Distributed Task Allocation Approach for Multi-Robot System,” in10th International Conference on Automa- tion, Robotics and Applications (ICARA), 2024, pp. 34–39
work page 2024
-
[14]
Graph Neural Network for Decentral- ized Multi-Robot Goal Assignment,
M. Goarin and G. Loianno, “Graph Neural Network for Decentral- ized Multi-Robot Goal Assignment,”IEEE Robotics and Automation Letters, vol. 9, no. 5, pp. 4051–4058, 2024
work page 2024
-
[15]
Z. Zhang, X. Jiang, Z. Yang, S. Ma, J. Chen, and W. Sun, “Scal- able Multi-Robot Task Allocation Using Graph Deep Reinforcement Learning with Graph Normalization,”Electronics, vol. 13, no. 8, p. 1561, Apr 2024
work page 2024
-
[16]
Z. Wang, C. Liu, and M. Gombolay, “Heterogeneous graph attention networks for scalable multi-robot scheduling with temporospatial constraints,”Autonomous Robots, vol. 46, no. 1, pp. 249–268, 2022
work page 2022
-
[17]
Multi-agent deep reinforcement learning for multi-robot applications: A survey,
J. Orr and A. Dutta, “Multi-agent deep reinforcement learning for multi-robot applications: A survey,”Sensors, vol. 23, no. 7, p. 3625, 2023
work page 2023
-
[18]
Multi-robot scene completion: Towards task-agnostic collaborative perception,
Y . Li, J. Zhang, D. Ma, Y . Wang, and C. Feng, “Multi-robot scene completion: Towards task-agnostic collaborative perception,” inPro- ceedings of The 6th Conference on Robot Learning, ser. Proceedings of Machine Learning Research, K. Liu, D. Kulic, and J. Ichnowski, Eds., vol. 205. PMLR, 14–18 Dec 2023, pp. 2062–2072
work page 2023
-
[19]
When2com: Multi-agent perception via communication graph grouping,
Y .-C. Liu, J. Tian, N. Glaser, and Z. Kira, “When2com: Multi-agent perception via communication graph grouping,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2020, pp. 4106–4115
work page 2020
-
[20]
Who2com: Collaborative perception via learnable handshake com- munication,
Y .-C. Liu, J. Tian, C.-Y . Ma, N. Glaser, C.-W. Kuo, and Z. Kira, “Who2com: Collaborative perception via learnable handshake com- munication,” inIEEE International Conference on Robotics and Au- tomation (ICRA), 2020, pp. 6876–6883
work page 2020
-
[21]
Where2comm: Communication-efficient collaborative perception via spatial confi- dence maps,
Y . Hu, S. Fang, Z. Lei, Y . Zhong, and S. Chen, “Where2comm: Communication-efficient collaborative perception via spatial confi- dence maps,”Advances in neural information processing systems, vol. 35, pp. 4874–4886, 2022
work page 2022
-
[22]
See what the robot can’t see: Learning cooperative perception for visual navigation,
J. Blumenkamp, Q. Li, B. Wang, Z. Liu, and A. Prorok, “See what the robot can’t see: Learning cooperative perception for visual navigation,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 7333–7340
work page 2023
-
[23]
R. Kortvelesy and A. Prorok, “ModGNN: Expert Policy Approxima- tion in Multi-Agent Systems with a Modular Graph Neural Network Architecture,” inIEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 9161–9167
work page 2021
-
[24]
A Frame- work for Real-World Multi-Robot Systems Running Decentralized GNN-Based Policies,
J. Blumenkamp, S. Morad, J. Gielis, Q. Li, and A. Prorok, “A Frame- work for Real-World Multi-Robot Systems Running Decentralized GNN-Based Policies,” inInternational Conference on Robotics and Automation (ICRA), 2022, pp. 8772–8778
work page 2022
- [25]
-
[26]
Robot Operating System 2: Design, architecture, and uses in the wild,
S. Macenski, T. Foote, B. Gerkey, C. Lalancette, and W. Woodall, “Robot Operating System 2: Design, architecture, and uses in the wild,”Science Robotics, vol. 7, no. 66, p. eabm6074, 2022
work page 2022
-
[27]
Zenoh: Unifying Communica- tion, Storage and Computation from the Cloud to the Microcontroller,
A. Corsaro, L. Cominardi, O. Hecart, G. Baldoni, J. Avital, J. Loudet, C. Guimares, M. Ilyin, and D. Bannov, “Zenoh: Unifying Communica- tion, Storage and Computation from the Cloud to the Microcontroller,” in26th Euromicro Conference on Digital System Design (DSD). Los Alamitos, CA, USA: IEEE Computer Society, Sep 2023, pp. 422–428
work page 2023
-
[28]
DUSt3R: Geometric 3D Vision Made Easy,
S. Wang, V . Leroy, Y . Cabon, B. Chidlovskii, and J. Revaud, “DUSt3R: Geometric 3D Vision Made Easy,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Jun 2024, pp. 20 697–20 709
work page 2024
-
[29]
A bench- mark and a baseline for robust multi-view depth estimation,
P. Schr ¨oppel, J. Bechtold, A. Amiranashvili, and T. Brox, “A bench- mark and a baseline for robust multi-view depth estimation,” in2022 International Conference on 3D Vision (3DV). IEEE, 2022, pp. 637– 645
work page 2022
-
[30]
The hungarian method for the assignment problem,
H. W. Kuhn, “The hungarian method for the assignment problem,” Naval research logistics quarterly, vol. 2, no. 1-2, pp. 83–97, 1955
work page 1955
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.