Recognition: unknown
Multi-Agent Systems: From Classical Paradigms to Large Foundation Model-Enabled Futures
Pith reviewed 2026-05-10 04:28 UTC · model grok-4.3
The pith
Large foundation models shift multi-agent systems from low-level state exchanges to semantic-level reasoning for more flexible coordination.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
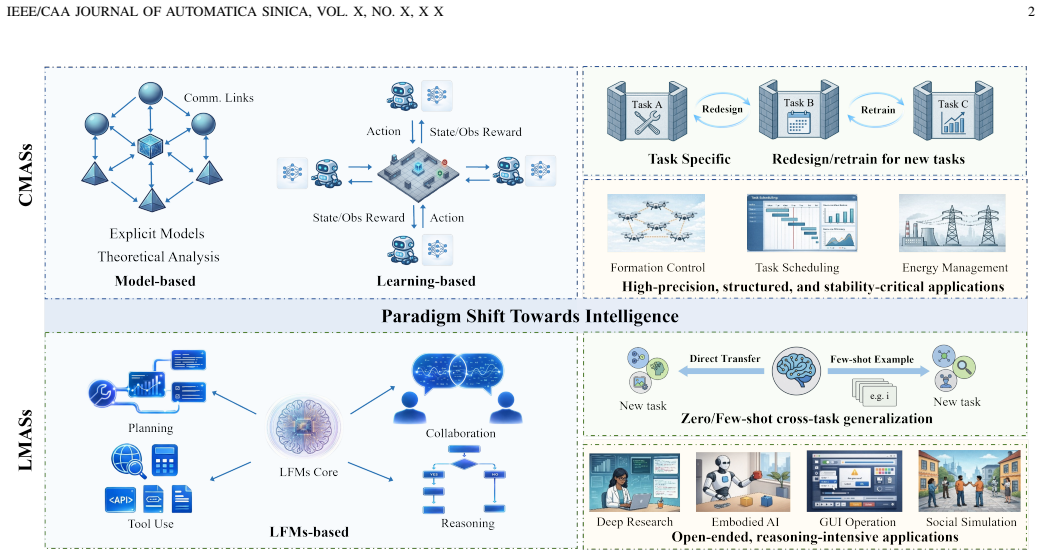
Classical multi-agent systems are reviewed within a closed-loop coordination framework across perception, communication, decision-making, and control; LFM-based multi-agent systems integrate large foundation models to raise collaboration from low-level state exchanges to semantic-level reasoning, thereby supporting more flexible coordination and improved adaptability across diverse scenarios.
What carries the argument
The closed-loop coordination framework of perception, communication, decision-making, and control, extended by large foundation model integration that enables semantic-level rather than state-level collaboration.
Load-bearing premise
The four-part closed-loop framework fully captures the essential distinctions between classical and foundation-model multi-agent systems, and the surveyed literature adequately represents both categories.
What would settle it
A documented multi-agent system whose coordination cannot be described by the perception-communication-decision-control loop or that achieves comparable adaptability without semantic-level reasoning would undermine the framework's completeness.
Figures





read the original abstract
With the rapid advancement of artificial intelligence, multi-agent systems (MASs) are evolving from classical paradigms toward architectures built upon large foundation models (LFMs). This survey provides a systematic review and comparative analysis of classical MASs (CMASs) and LFM-based MASs (LMASs). First, within a closed-loop coordination framework, CMASs are reviewed across four fundamental dimensions: perception, communication, decision-making, and control. Beyond this framework, LMASs integrate LFMs to lift collaboration from low-level state exchanges to semantic-level reasoning, enabling more flexible coordination and improved adaptability across diverse scenarios. Then, a comparative analysis is conducted to contrast CMASs and LMASs across architecture, operating mechanism, adaptability, and application. Finally, future perspectives on MASs are presented, summarizing open challenges and potential research opportunities.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper is a survey that reviews classical multi-agent systems (CMASs) using a proposed closed-loop coordination framework with four dimensions (perception, communication, decision-making, and control), describes how LFM-based MASs (LMASs) shift collaboration to semantic-level reasoning, performs a comparative analysis of CMASs and LMASs on architecture, operating mechanism, adaptability, and applications, and discusses future perspectives including open challenges.
Significance. If the literature synthesis and framework hold, the paper provides a useful organizing lens for the transition from classical to foundation-model-enabled multi-agent systems, highlighting the move from low-level state exchanges to semantic reasoning. This could aid researchers in navigating the field, though as a descriptive review without new theorems, experiments, or quantitative benchmarks, its impact depends on the breadth and balance of cited works.
major comments (1)
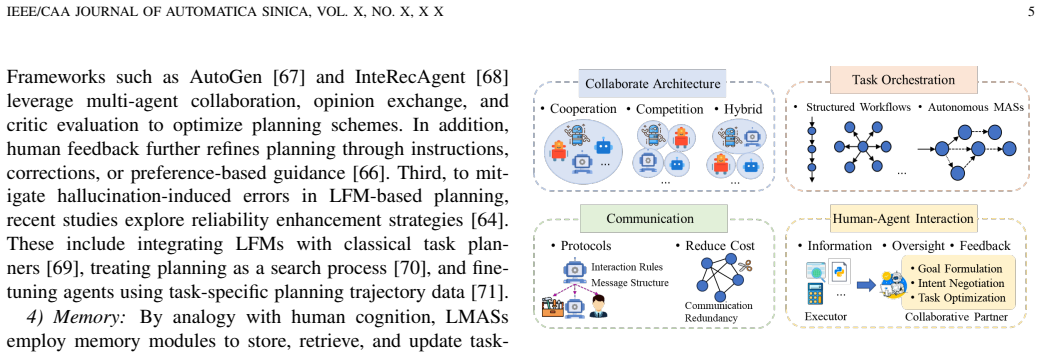
- [Closed-loop coordination framework] Closed-loop coordination framework: The manuscript presents the four dimensions (perception, communication, decision-making, control) as the core lens for reviewing CMASs and contrasting them with LMASs, yet provides no explicit justification, derivation from prior MAS taxonomies, or comparison to alternative frameworks; this choice is load-bearing for the central comparative claims and the assertion that the framework captures core differences.
minor comments (2)
- [Abstract] Abstract: The acronym LMASs is introduced without a parenthetical expansion on first use in the abstract (though LFMs is expanded); ensure consistent first-use definitions throughout the manuscript.
- [Comparative analysis] Comparative analysis section: The four comparison dimensions are enumerated but the abstract does not indicate whether concrete examples, tables, or quantitative contrasts are supplied for each; verify that the full text includes specific, citable differences to support the claims about architecture, mechanism, adaptability, and applications.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive feedback on our survey. The comment regarding the closed-loop coordination framework is well-taken, and we address it directly below. We will incorporate revisions to strengthen the manuscript as a minor revision.
read point-by-point responses
-
Referee: [Closed-loop coordination framework] Closed-loop coordination framework: The manuscript presents the four dimensions (perception, communication, decision-making, control) as the core lens for reviewing CMASs and contrasting them with LMASs, yet provides no explicit justification, derivation from prior MAS taxonomies, or comparison to alternative frameworks; this choice is load-bearing for the central comparative claims and the assertion that the framework captures core differences.
Authors: We agree that the manuscript would benefit from an explicit justification of the proposed closed-loop coordination framework. The four dimensions are intended to capture the essential stages of coordination in multi-agent systems, extending the classical sense-plan-act cycle with communication to account for inter-agent interactions, as commonly discussed in foundational MAS literature. However, we acknowledge that the initial version did not include a dedicated derivation from prior taxonomies (such as those in Wooldridge's agent-oriented software engineering or standard MAS surveys) nor a comparison to alternatives like BDI architectures, role-based organizations, or norm-governed systems. In the revised version, we will add a new subsection (e.g., Section 2.1) that: (i) motivates the framework by tracing it to core components in established MAS taxonomies, (ii) justifies the selection of these specific dimensions as a minimal yet comprehensive lens for both CMASs and LMASs, and (iii) briefly contrasts it with alternative frameworks to clarify its utility in highlighting the shift to semantic-level collaboration. This will directly support the central comparative claims without changing the review's scope or conclusions. revision: yes
Circularity Check
No significant circularity; survey paper with independent synthesis
full rationale
This is a literature review that proposes a closed-loop coordination framework as an organizing lens for contrasting classical MASs and LFM-based MASs. No equations, fitted parameters, derivations, or predictions appear; all claims are descriptive syntheses of externally cited work. The central integrative statement about lifting collaboration to semantic-level reasoning is presented as a summary of existing literature rather than a result obtained by reducing to internally defined quantities or self-citations. The paper is therefore self-contained against external benchmarks with no load-bearing circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Roco: Dialectic multi-robot collabo- ration with large language models,
Z. Mandi, S. Jain, and S. Song, “Roco: Dialectic multi-robot collabo- ration with large language models,” inProceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 286–299
2024
-
[2]
Generative agents: Interactive simulacra of human behavior,
J. S. Park, J. O’Brien, C. J. Cai, M. R. Morris, P. Liang, and M. S. Bernstein, “Generative agents: Interactive simulacra of human behavior,” inProceedings of the 36th Annual ACM Symposium on User Interface Software and Technology, 2023, pp. 1–22
2023
-
[3]
Internet of satellites (IoS) for intelligent satellite cluster: Applications, methods, and challenges,
G. Fan, P. Wu, M. Yang, J. Wang, D. Ran, J. Dai, Y . Zhang, L. Cao, W. Xu, and P. Zhang, “Internet of satellites (IoS) for intelligent satellite cluster: Applications, methods, and challenges,”Engineering, vol. 54, pp. 155–170, 2025
2025
-
[4]
Review on particle swarm optimization: Ap- plication toward autonomous dynamical systems,
K. Bojappa and J. Lee, “Review on particle swarm optimization: Ap- plication toward autonomous dynamical systems,”IEEE/CAA Journal of Automatica Sinica, vol. 12, no. 9, pp. 1762–1775, 2025
2025
-
[5]
An overview of recent progress in the study of distributed multi-agent coordination,
Y . Cao, W. Yu, W. Ren, and G. Chen, “An overview of recent progress in the study of distributed multi-agent coordination,”IEEE Transactions on Industrial Informatics, vol. 9, no. 1, pp. 427–438, 2012
2012
-
[6]
The confluence of evolutionary computation and multi-agent systems: A survey,
T.-Y . Chen, W.-N. Chen, F.-F. Wei, X.-Q. Guo, W.-X. Song, R. Zhu, Q. Lin, and J. Zhang, “The confluence of evolutionary computation and multi-agent systems: A survey,”IEEE/CAA Journal of Automatica Sinica, vol. 12, pp. 1–19, 2025
2025
-
[7]
Multiagent systems: A survey from a machine learning perspective,
P. Stone and M. Veloso, “Multiagent systems: A survey from a machine learning perspective,”Autonomous Robots, vol. 8, no. 3, pp. 345–383, 2000
2000
-
[8]
Multi-Agent Collaboration Mechanisms: A Survey of LLMs
K.-T. Tran, D. Dao, M.-D. Nguyen, Q.-V . Pham, B. O’Sullivan, and H. D. Nguyen, “Multi-agent collaboration mechanisms: A survey of LLMs,”arXiv preprint arXiv:2501.06322, 2025
work page internal anchor Pith review arXiv 2025
-
[9]
Consensus and coop- eration in networked multi-agent systems,
R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and coop- eration in networked multi-agent systems,”Proceedings of the IEEE, vol. 95, no. 1, pp. 215–233, 2007
2007
-
[10]
arXiv preprint arXiv:2312.10256 , year =
D. Huh and P. Mohapatra, “Multi-agent reinforcement learning: A comprehensive survey,”arXiv preprint arXiv:2312.10256, 2023
-
[11]
Distributed optimal consensus control for multiagent systems based on event-triggered and prioritized experience replay strategies,
C. Zhang, L. Ji, S. Yang, X. Guo, and H. Li, “Distributed optimal consensus control for multiagent systems based on event-triggered and prioritized experience replay strategies,”Science China Information Sciences, vol. 68, no. 1, p. 112206, 2025
2025
-
[12]
Distributed adaptive formation with state constraints for multi-agent systems: Ne and rne searching in aggregative games,
Z. Peng, B. Wu, G. Wen, C. Pan, and T. Huang, “Distributed adaptive formation with state constraints for multi-agent systems: Ne and rne searching in aggregative games,”Science China Information Sciences, vol. 69, no. 6, p. 162201, 2026
2026
-
[13]
Cooperative task scheduling and resource allocation of embodied multi-satellite systems: AI-driven perspective,
J. Xu, J. Luo, X. Cao, Y . Gao, S. Mao, M. Wang, W. Du, Q. Sun, J. Liu, X. Diet al., “Cooperative task scheduling and resource allocation of embodied multi-satellite systems: AI-driven perspective,”Science China Technological Sciences, vol. 69, no. 1, p. 1100301, 2026
2026
-
[14]
Swarm intelligence: A review of algorithms,
A. Chakraborty and A. K. Kar, “Swarm intelligence: A review of algorithms,”Nature-inspired Computing and Optimization, pp. 475– 494, 2017
2017
-
[15]
Applications of multi-agent reinforcement learning in future internet: A comprehensive survey,
T. Li, K. Zhu, N. C. Luong, D. Niyato, Q. Wu, Y . Zhang, and B. Chen, “Applications of multi-agent reinforcement learning in future internet: A comprehensive survey,”IEEE Communications Surveys & Tutorials, vol. 24, no. 2, pp. 1240–1279, 2022
2022
-
[16]
L. Yuan, Z. Zhang, L. Li, C. Guan, and Y . Yu, “A survey of progress on cooperative multi-agent reinforcement learning in open environment,” arXiv preprint arXiv:2312.01058, 2023
-
[17]
Large Language Model based Multi-Agents: A Survey of Progress and Challenges
T. Guo, X. Chen, Y . Wang, R. Chang, S. Pei, N. V . Chawla, O. Wiest, and X. Zhang, “Large language model based multi-agents: A survey of progress and challenges,”arXiv preprint arXiv:2402.01680, 2024
work page internal anchor Pith review arXiv 2024
-
[18]
The rise and potential of large language model based agents: A survey,
Z. Xi, W. Chen, X. Guo, W. He, Y . Ding, B. Hong, M. Zhang, J. Wang, S. Jin, E. Zhouet al., “The rise and potential of large language model based agents: A survey,”Science China Information Sciences, vol. 68, no. 2, p. 121101, 2025
2025
-
[19]
Large model based agents: State-of-the-art, cooperation paradigms, security and privacy, and future trends,
Y . Wang, Y . Pan, Z. Su, Y . Deng, Q. Zhao, L. Du, T. H. Luan, J. Kang, and D. Niyato, “Large model based agents: State-of-the-art, cooperation paradigms, security and privacy, and future trends,”IEEE Communications Surveys & Tutorials, vol. 28, pp. 1906–1949, 2026
1906
-
[20]
From LLM Reasoning to Autonomous AI Agents: A Comprehensive Review
M. A. Ferrag, N. Tihanyi, and M. Debbah, “From LLM reasoning to autonomous AI agents: A comprehensive review,”arXiv preprint arXiv:2504.19678, 2025
work page internal anchor Pith review arXiv 2025
-
[21]
Knowledge-empowered, collaborative, and co- evolving AI models: The post-LLM roadmap,
F. Wu, T. Shen, T. B ¨ack, J. Chen, G. Huang, Y . Jin, K. Kuang, M. Li, C. Lu, J. Miaoet al., “Knowledge-empowered, collaborative, and co- evolving AI models: The post-LLM roadmap,”Engineering, vol. 44, pp. 87–100, 2025
2025
-
[22]
The Landscape of Agentic Reinforcement Learning for LLMs: A Survey
G. Zhang, H. Geng, X. Yu, Z. Yin, Z. Zhang, Z. Tan, H. Zhou, Z. Li, X. Xue, Y . Liet al., “The landscape of agentic reinforcement learning for LLMs: A survey,”arXiv preprint arXiv:2509.02547, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[23]
Agentic AI: a com- prehensive survey of architectures, applications, and future directions,
M. Abou Ali, F. Dornaika, and J. Charafeddine, “Agentic AI: a com- prehensive survey of architectures, applications, and future directions,” Artificial Intelligence Review, vol. 59, no. 1, p. 11, 2025
2025
-
[24]
A survey on the optimization of large language model-based agents,
S. Du, J. Zhao, J. Shi, Z. Xie, X. Jiang, Y . Bai, and L. He, “A survey on the optimization of large language model-based agents,”arXiv preprint arXiv:2503.12434, 2025
-
[25]
LLM-based agentic reasoning frameworks: A survey from methods to scenarios,
B. Zhao, L. G. Foo, P. Hu, C. Theobalt, H. Rahmani, and J. Liu, “LLM-based agentic reasoning frameworks: A survey from methods to scenarios,”arXiv preprint arXiv:2508.17692, 2025
-
[26]
Wooldridge,An introduction to multiagent systems
M. Wooldridge,An introduction to multiagent systems. John wiley & sons, 2009
2009
-
[27]
Computer vision tasks for intelli- gent aerospace perception: An overview,
H. Chen, Q. Sun, F. Li, and Y . Tang, “Computer vision tasks for intelli- gent aerospace perception: An overview,”Science China Technological Sciences, vol. 67, no. 9, pp. 2727–2748, 2024
2024
-
[28]
Cooper: Cooperative perception for connected autonomous vehicles based on 3D point clouds,
Q. Chen, S. Tang, Q. Yang, and S. Fu, “Cooper: Cooperative perception for connected autonomous vehicles based on 3D point clouds,” in Proceedings of the 2019 IEEE 39th International Conference on Distributed Computing Systems (ICDCS). IEEE, 2019, pp. 514–524
2019
-
[29]
Dair-v2x: A large-scale dataset for vehicle- infrastructure cooperative 3d object detection,
H. Yu, Y . Luo, M. Shu, Y . Huo, Z. Yang, Y . Shi, Z. Guo, H. Li, X. Hu, J. Yuanet al., “Dair-v2x: A large-scale dataset for vehicle- infrastructure cooperative 3d object detection,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 21 361–21 370
2022
-
[30]
Mmcooper: A multi-agent multi-stage communication-efficient and collaboration-robust cooperative perception framework,
B. Liu, J. Teng, H. Xue, E. Wang, C. Zhu, P. Wang, and L. Wu, “Mmcooper: A multi-agent multi-stage communication-efficient and collaboration-robust cooperative perception framework,” inProceed- ings of the IEEE/CVF International Conference on Computer Vision, 2025, pp. 28 396–28 406
2025
-
[31]
A novel fusion attention-based lightweight model for pipeline weld multiscale defect detection,
S. Zhang, C. Wang, H. Dong, X. Zhao, and C. Guan, “A novel fusion attention-based lightweight model for pipeline weld multiscale defect detection,”IEEE Transactions on Industrial Informatics, Early Access, 2026
2026
-
[32]
Spatio-temporal domain awareness for multi-agent col- laborative perception,
K. Yang, D. Yang, J. Zhang, M. Li, Y . Liu, J. Liu, H. Wang, P. Sun, and L. Song, “Spatio-temporal domain awareness for multi-agent col- laborative perception,” inProceedings of the IEEE/CVF International Conference on Computer Vision, 2023, pp. 23 383–23 392
2023
-
[33]
Multi-agent collaborative perception via motion-aware robust communication network,
S. Hong, Y . Liu, Z. Li, S. Li, and Y . He, “Multi-agent collaborative perception via motion-aware robust communication network,” inPro- ceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 15 301–15 310
2024
-
[34]
Pragmatic heterogeneous collaborative perception via generative communication mechanism,
J. Zhou, P. Dai, Q. Wei, B. Liu, X. Wu, and J. Wang, “Pragmatic heterogeneous collaborative perception via generative communication mechanism,”arXiv preprint arXiv:2510.19618, 2025
-
[35]
Multi-agent coordination across diverse applications: A survey.arXiv preprint arXiv:2502.14743, 2025
L. Sun, Y . Yang, Q. Duan, Y . Shi, C. Lyu, Y .-C. Chang, C.-T. Lin, and Y . Shen, “Multi-agent coordination across diverse applications: A survey,”arXiv preprint arXiv:2502.14743, 2025
-
[36]
Network topology and information efficiency of multi-agent systems: Study based on marl,
X. Zhang, S. Cheng, Z. Zhong, and J. Yu, “Network topology and information efficiency of multi-agent systems: Study based on marl,” arXiv preprint arXiv:2510.07888, 2025
-
[37]
Robust multi- agent communication with graph information bottleneck optimization,
S. Ding, W. Du, L. Ding, J. Zhang, L. Guo, and B. An, “Robust multi- agent communication with graph information bottleneck optimization,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 46, no. 5, pp. 3096–3107, 2023
2023
-
[38]
Event-triggered communication network with limited-bandwidth constraint for multi- agent reinforcement learning,
G. Hu, Y . Zhu, D. Zhao, M. Zhao, and J. Hao, “Event-triggered communication network with limited-bandwidth constraint for multi- agent reinforcement learning,”IEEE Transactions on Neural Networks and Learning Systems, vol. 34, no. 8, pp. 3966–3978, 2021
2021
-
[39]
Event-triggered attitude synchro- nization of multiple rigid body systems with velocity-free measure- ments,
Y . Tang, X. Jin, Y . Shi, and W. Du, “Event-triggered attitude synchro- nization of multiple rigid body systems with velocity-free measure- ments,”Automatica, vol. 143, p. 110460, 2022
2022
-
[40]
Event-triggered fixed-time attitude consensus with fixed and switching topologies,
X. Jin, Y . Shi, Y . Tang, H. Werner, and J. Kurths, “Event-triggered fixed-time attitude consensus with fixed and switching topologies,” IEEE Transactions on Automatic Control, vol. 67, no. 8, pp. 4138– 4145, 2021
2021
-
[41]
Learning to communicate through implicit communication channels,
H. Wang, B. Chen, z. zhang, and B. Wang, “Learning to communicate through implicit communication channels,” inProceedings of the Thir- teenth International Conference on Learning Representations, 2025, pp. 55 179–55 195
2025
-
[42]
W. Jin, H. Du, B. Zhao, X. Tian, B. Shi, and G. Yang, “A comprehensive survey on multi-agent cooperative decision-making: Scenarios, approaches, challenges and perspectives,”arXiv preprint arXiv:2503.13415, 2025. IEEE/CAA JOURNAL OF AUTOMATICA SINICA, VOL. X, NO. X, X X 14
-
[43]
Cooperative multi-agent learning: The state of the art,
L. Panait and S. Luke, “Cooperative multi-agent learning: The state of the art,”Autonomous Agent and Multi-agent Systems, vol. 11, no. 3, pp. 387–434, 2005
2005
-
[44]
Distributed nash equilibrium for pursuit-evasion game with one evader and multiple pursuers,
L. Wang, Z. Liu, S. Yuan, and Z. Pu, “Distributed nash equilibrium for pursuit-evasion game with one evader and multiple pursuers,”Science China Information Sciences, vol. 68, no. 9, p. 192205, 2025
2025
-
[45]
Recent advances in consensus of multi-agent systems: A brief survey,
J. Qin, Q. Ma, Y . Shi, and L. Wang, “Recent advances in consensus of multi-agent systems: A brief survey,”IEEE Transactions on Industrial Electronics, vol. 64, no. 6, pp. 4972–4983, 2016
2016
-
[46]
Consensus in multi-agent systems: a review,
A. Amirkhani and A. H. Barshooi, “Consensus in multi-agent systems: a review,”Artificial Intelligence Review, vol. 55, no. 5, pp. 3897–3935, 2022
2022
-
[47]
Consensus seeking in multiagent systems under dynamically changing interaction topologies,
W. Ren and R. W. Beard, “Consensus seeking in multiagent systems under dynamically changing interaction topologies,”IEEE Transactions on Automatic Control, vol. 50, no. 5, pp. 655–661, 2005
2005
-
[48]
Synchronizing linear systems via partial-state coupling,
S. E. Tuna, “Synchronizing linear systems via partial-state coupling,” Automatica, vol. 44, no. 8, pp. 2179–2184, 2008
2008
-
[49]
Distributed consensus for multiagent systems with communication delays and limited data rate,
S. Liu, T. Li, and L. Xie, “Distributed consensus for multiagent systems with communication delays and limited data rate,”SIAM Journal on Control and Optimization, vol. 49, no. 6, pp. 2239–2262, 2011
2011
-
[50]
Observer-based consensus control for mass with prescribed constraints via reinforcement learning algorithm,
A. Luo, Q. Zhou, H. Ma, and H. Li, “Observer-based consensus control for mass with prescribed constraints via reinforcement learning algorithm,”IEEE Transactions on Neural Networks and Learning Systems, vol. 35, no. 12, pp. 17 281–17 291, 2023
2023
-
[51]
Adaptive prescribed- time dynamic self-triggered time-varying bipartite formation control for uncertain nonlinear multiagent systems with actuator faults,
Y . Zhang, Y . Wu, S. Ma, and K. H. Cheong, “Adaptive prescribed- time dynamic self-triggered time-varying bipartite formation control for uncertain nonlinear multiagent systems with actuator faults,”IEEE Transactions on Cybernetics, Early Access, 2026
2026
-
[52]
A survey of multi-agent formation control,
K.-K. Oh, M.-C. Park, and H.-S. Ahn, “A survey of multi-agent formation control,”Automatica, vol. 53, pp. 424–440, 2015
2015
-
[53]
Robust formation control for co- operative underactuated quadrotors via reinforcement learning,
W. Zhao, H. Liu, and F. L. Lewis, “Robust formation control for co- operative underactuated quadrotors via reinforcement learning,”IEEE Transactions on Neural Networks and Learning Systems, vol. 32, no. 10, pp. 4577–4587, 2020
2020
-
[54]
A brief overview of chatgpt: The history, status quo and potential future development,
T. Wu, S. He, J. Liu, S. Sun, K. Liu, Q.-L. Han, and Y . Tang, “A brief overview of chatgpt: The history, status quo and potential future development,”IEEE/CAA Journal of Automatica Sinica, vol. 10, no. 5, pp. 1122–1136, 2023
2023
-
[55]
Deepseek: paradigm shifts and technical evolution in large ai models,
L. Xiong, H. Wang, X. Chen, L. Sheng, Y . Xiong, J. Liu, Y . Xiao, H. Chen, Q.-L. Han, and Y . Tang, “Deepseek: paradigm shifts and technical evolution in large ai models,”IEEE/CAA Journal of Auto- matica Sinica, vol. 12, no. 5, pp. 841–858, 2025
2025
-
[56]
ChatDev: Communicative Agents for Software Development
C. Qian, W. Liu, H. Liu, N. Chen, Y . Dang, J. Li, C. Yang, W. Chen, Y . Su, X. Conget al., “Chatdev: Communicative agents for software development,”arXiv preprint arXiv:2307.07924, 2023
work page internal anchor Pith review arXiv 2023
-
[57]
Metagpt: Meta programming for a multi-agent col- laborative framework,
S. Hong, M. Zhuge, J. Chen, X. Zheng, Y . Cheng, J. Wang, C. Zhang, z. wang, S. Yau, Z. Lin, L. Zhou, C. Ran, L. Xiao, C. Wu, and J. Schmidhuber, “Metagpt: Meta programming for a multi-agent col- laborative framework,” inProceedings of the Twelfth International Conference on Learning Representation, 2024, pp. 23 247–23 275
2024
-
[58]
Automated Design of Agentic Systems
S. Hu, C. Lu, and J. Clune, “Automated design of agentic systems,” arXiv preprint arXiv:2408.08435, 2024
work page internal anchor Pith review arXiv 2024
-
[59]
The virtual lab of AI agents designs new sars-cov-2 nanobodies,
K. Swanson, W. Wu, N. L. Bulaong, J. E. Pak, and J. Zou, “The virtual lab of AI agents designs new sars-cov-2 nanobodies,”Nature, vol. 646, no. 8085, pp. 716–723, 2025
2025
-
[60]
Bert: Pre-training of deep bidirectional transformers for language understanding,
J. Devlin, M.-W. Chang, K. Lee, and K. Toutanova, “Bert: Pre-training of deep bidirectional transformers for language understanding,” in Proceedings of the 2019 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies, volume 1 (long and short papers), 2019, pp. 4171–4186
2019
-
[61]
Deep residual learning for image recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image recognition,” inProceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016, pp. 770–778
2016
-
[62]
Web agents with world models: Learning and leveraging environment dynamics in web navigation
H. Chae, N. Kim, K. T.-i. Ong, M. Gwak, G. Song, J. Kim, S. Kim, D. Lee, and J. Yeo, “Web agents with world models: Learning and leveraging environment dynamics in web navigation,”arXiv preprint arXiv:2410.13232, 2024
-
[63]
Agent planning with world knowledge model,
S. Qiao, R. Fang, N. Zhang, Y . Zhu, X. Chen, S. Deng, Y . Jiang, P. Xie, F. Huang, and H. Chen, “Agent planning with world knowledge model,”Advances in Neural Information Processing Systems, vol. 37, pp. 114 843–114 871, 2024
2024
-
[64]
Plangen- llms: A modern survey of LLM planning capabilities,
H. Wei, Z. Zhang, S. He, T. Xia, S. Pan, and F. Liu, “Plangen- llms: A modern survey of LLM planning capabilities,”arXiv preprint arXiv:2502.11221, 2025
-
[65]
Chain-of-thought prompting elicits reasoning in large language models,
J. Wei, X. Wang, D. Schuurmans, M. Bosma, F. Xia, E. Chi, Q. V . Le, D. Zhouet al., “Chain-of-thought prompting elicits reasoning in large language models,”Advances in Neural Information Processing Systems, vol. 35, pp. 24 824–24 837, 2022
2022
-
[66]
A survey on the feedback mechanism of LLM- based AI agents,
Z. Liu, X. Bai, K. Chen, X. Chen, X. Li, Y . Xiang, J. Liu, H.-D. Li, Y . Wang, L. Nieet al., “A survey on the feedback mechanism of LLM- based AI agents,” inProceedings of the Thirty-Fourth International Joint Conference on Artificial Intelligence, 2025, pp. 10 582–10 592
2025
-
[67]
AutoGen: Enabling Next-Gen LLM Applications via Multi-Agent Conversation
Q. Wu, G. Bansal, J. Zhang, Y . Wu, B. Li, E. Zhu, L. Jiang, X. Zhang, S. Zhang, J. Liuet al., “Autogen: Enabling next-gen LLM applications via multi-agent conversations,”arXiv preprint arXiv:2308.08155, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[68]
Recommender AI agent: Integrating large language models for interactive recommen- dations,
X. Huang, J. Lian, Y . Lei, J. Yao, D. Lian, and X. Xie, “Recommender AI agent: Integrating large language models for interactive recommen- dations,”ACM Transactions on Information Systems, vol. 43, no. 4, pp. 1–33, 2025
2025
-
[69]
Isr-llm: Iterative self-refined large language model for long-horizon sequential task planning,
Z. Zhou, J. Song, K. Yao, Z. Shu, and L. Ma, “Isr-llm: Iterative self-refined large language model for long-horizon sequential task planning,” inProceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 2081–2088
2024
-
[70]
arXiv preprint arXiv:2504.16855 , year=
Z. Shi, M. Fang, and L. Chen, “Monte carlo planning with large language model for text-based game agents,”arXiv preprint arXiv:2504.16855, 2025
-
[71]
Agentgen: Enhancing planning abilities for large language model based agent via environment and task generation,
M. Hu, P. Zhao, C. Xu, Q. Sun, J.-G. Lou, Q. Lin, P. Luo, and S. Rajmo- han, “Agentgen: Enhancing planning abilities for large language model based agent via environment and task generation,” inProceedings of the 31st ACM SIGKDD Conference on Knowledge Discovery and Data Mining V . 1, 2025, pp. 496–507
2025
-
[72]
Machine memory intelligence: Inspired by human memory mechanisms,
Q. Zheng, H. Liu, X. Zhang, C. Yan, X. Cao, T. Gong, Y .-J. Liu, B. Shi, Z. Peng, X. Fan, Y . Cai, and J. Liu, “Machine memory intelligence: Inspired by human memory mechanisms,”Engineering, vol. 55, pp. 24–35, 2025
2025
-
[73]
A survey on the memory mechanism of large language model-based agents,
Z. Zhang, Q. Dai, X. Bo, C. Ma, R. Li, X. Chen, J. Zhu, Z. Dong, and J.-R. Wen, “A survey on the memory mechanism of large language model-based agents,”ACM Transactions on Information Systems, vol. 43, no. 6, pp. 1–47, 2025
2025
-
[74]
ReAct: Synergizing Reasoning and Acting in Language Models
S. Yao, J. Zhao, D. Yu, N. Du, I. Shafran, K. Narasimhan, and Y . Cao, “React: Synergizing reasoning and acting in language models,”arXiv preprint arXiv:2210.03629, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[75]
Expel: LLM agents are experiential learners,
A. Zhao, D. Huang, Q. Xu, M. Lin, Y .-J. Liu, and G. Huang, “Expel: LLM agents are experiential learners,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 38, no. 17, 2024, pp. 19 632– 19 642
2024
-
[76]
arXiv preprint arXiv:2508.17281 , year=
S. S. Chowa, R. Alvi, S. S. Rahman, M. A. Rahman, M. A. K. Raiaan, M. R. Islam, M. Hussain, and S. Azam, “From language to action: A review of large language models as autonomous agents and tool users,” arXiv preprint arXiv:2508.17281, 2025
-
[77]
Hugginggpt: Solving AI tasks with chatgpt and its friends in hugging face,
Y . Shen, K. Song, X. Tan, D. Li, W. Lu, and Y . Zhuang, “Hugginggpt: Solving AI tasks with chatgpt and its friends in hugging face,”Ad- vances in Neural Information Processing Systems, vol. 36, pp. 38 154– 38 180, 2023
2023
-
[78]
Gorilla: Large language model connected with massive apis,
S. G. Patil, T. Zhang, X. Wang, and J. E. Gonzalez, “Gorilla: Large language model connected with massive apis,”Advances in Neural Information Processing Systems, vol. 37, pp. 126 544–126 565, 2024
2024
-
[79]
Multi-agent embodied ai: Advances and future directions.arXiv preprint arXiv:2505.05108,
Z. Feng, R. Xue, L. Yuan, Y . Yu, N. Ding, M. Liu, B. Gao, J. Sun, X. Zheng, and G. Wang, “Multi-agent embodied AI: Advances and future directions,”arXiv preprint arXiv:2505.05108, 2025
-
[80]
Encouraging Divergent Thinking in Large Language Models through Multi-Agent Debate
T. Liang, Z. He, W. Jiao, X. Wang, Y . Wang, R. Wang, Y . Yang, S. Shi, and Z. Tu, “Encouraging divergent thinking in large language models through multi-agent debate,”arXiv preprint arXiv:2305.19118, 2023
work page internal anchor Pith review arXiv 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.