HALO: Hybrid Auto-encoded Locomotion with Learned Latent Dynamics, Poincar\'e Maps, and Regions of Attraction
Pith reviewed 2026-05-10 03:45 UTC · model grok-4.3
The pith
HALO learns low-dimensional latent models of legged robot dynamics that preserve stability structure and lift region-of-attraction boundaries back to the full system.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
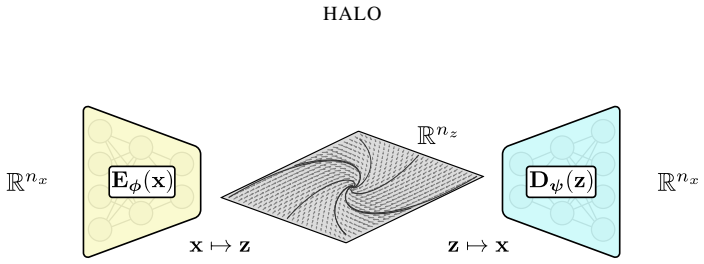
HALO employs an autoencoder to identify a low-dimensional latent state together with a learned latent Poincaré map that captures step-to-step locomotion dynamics. This enables Lyapunov analysis and the construction of an associated region of attraction in the latent space, both of which can be lifted back to the full-order state space through the decoder. Experiments on a simulated hopping robot and full-body humanoid locomotion demonstrate that HALO yields low-dimensional models that retain meaningful stability structure and predict full-order region-of-attraction boundaries.
What carries the argument
The hybrid autoencoder paired with a learned latent Poincaré map, which extracts a low-dimensional representation of periodic hybrid dynamics and supports lifting of Lyapunov-based stability sets via the decoder.
If this is right
- Data-driven low-dimensional models can now support Lyapunov stability certificates for periodic hybrid locomotion without manual template design.
- Region-of-attraction boundaries predicted in the latent space provide useful approximations for full-order robot safety margins on both hopping and humanoid platforms.
- The Poincaré map in latent space captures step-to-step return dynamics well enough to enable standard discrete-time stability tools on continuous hybrid systems.
- Controller synthesis or verification performed inside the latent space can be decoded and applied to the original high-dimensional robot model.
Where Pith is reading between the lines
- If the lifting property holds reliably, similar autoencoder-plus-Poincaré constructions could be tested on other hybrid periodic systems such as rhythmic manipulation or bipedal walking with contact switching.
- The method implicitly suggests that latent-space Lyapunov functions might serve as practical certificates for safe reinforcement learning policies on legged robots.
- One could extend the framework by adding uncertainty bounds on the decoder to produce conservative full-order attraction regions that account for reconstruction error.
Load-bearing premise
Stability and safety properties observed in the latent space transfer back to the full-order system through the decoder.
What would settle it
Compute the true region of attraction directly on the full-order simulated hopping robot dynamics and compare its boundary shape and size to the one obtained by lifting the latent-space region through the decoder; substantial mismatch would show the transfer fails.
Figures







read the original abstract
Reduced-order models are powerful for analyzing and controlling high-dimensional dynamical systems. Yet constructing these models for complex hybrid systems such as legged robots remains challenging. Classical approaches rely on hand-designed template models (e.g., LIP, SLIP), which, though insightful, only approximate the underlying dynamics. In contrast, data-driven methods can extract more accurate low-dimensional representations, but it remains unclear when stability and safety properties observed in the latent space meaningfully transfer back to the full-order system. To bridge this gap, we introduce HALO (Hybrid Auto-encoded Locomotion), a framework for learning latent reduced-order models of periodic hybrid dynamics directly from trajectory data. HALO employs an autoencoder to identify a low-dimensional latent state together with a learned latent Poincar\'e map that captures step-to-step locomotion dynamics. This enables Lyapunov analysis and the construction of an associated region of attraction in the latent space, both of which can be lifted back to the full-order state space through the decoder. Experiments on a simulated hopping robot and full-body humanoid locomotion demonstrate that HALO yields low-dimensional models that retain meaningful stability structure and predict full-order region-of-attraction boundaries.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces HALO, a data-driven framework that uses an autoencoder to learn a low-dimensional latent state representation and a latent Poincaré map from trajectory data of periodic hybrid locomotion systems. Lyapunov analysis is performed in this latent space to construct a region of attraction (RoA), which is then lifted back to the full-order state space via the decoder. Experiments on a simulated hopping robot and a full-body humanoid are claimed to show that the learned models retain meaningful stability structure and can predict full-order RoA boundaries, offering an alternative to hand-designed reduced-order templates such as LIP or SLIP.
Significance. If the central claims hold, HALO would provide a principled way to obtain reduced-order models for hybrid legged systems that preserve stability properties under lifting, addressing a key limitation of purely data-driven approaches. The explicit use of learned Poincaré maps combined with standard Lyapunov techniques in latent space, together with the decoder-based lift, is a clear strength; the experiments on both simple hopping and complex humanoid dynamics further support generality. This could meaningfully advance analysis and control of high-dimensional robotic systems beyond classical templates, provided the transfer of stability guarantees is rigorously validated.
minor comments (3)
- [Abstract] Abstract: the statement that experiments 'demonstrate retention of stability structure and predict full-order region-of-attraction boundaries' would be strengthened by explicit mention of quantitative metrics (e.g., RoA volume error, prediction accuracy), validation procedure for the decoder lift, and at least one baseline comparison even if these appear later in the manuscript.
- [Method] The description of the autoencoder architecture, latent dimension choice, and training procedure should include the specific hyperparameters and loss terms used, as these are listed among the free parameters and directly affect reproducibility of the learned map and RoA.
- [Experiments] Figure captions and axis labels in the results section would benefit from clearer indication of which quantities are in latent versus full-order space and how the lifted RoA boundaries are visualized.
Simulated Author's Rebuttal
We thank the referee for their encouraging summary of HALO and for recognizing its potential to provide principled reduced-order models that preserve stability properties for hybrid legged systems. We appreciate the recommendation for minor revision. No specific major comments were raised in the report.
Circularity Check
No significant circularity detected
full rationale
The HALO framework learns a latent state via autoencoder and a latent Poincaré map directly from trajectory data, then performs standard Lyapunov analysis to obtain a region of attraction in latent coordinates before decoding back to full-order space. This pipeline is a conventional data-driven reduced-order modeling approach; the stability transfer is treated as an empirical property verified on hopping and humanoid examples rather than a definitional identity or fitted parameter renamed as prediction. No self-citation chains, uniqueness theorems imported from prior author work, or ansatzes smuggled via citation appear as load-bearing steps. The derivation chain remains independent of its inputs beyond the learned mapping from data.
Axiom & Free-Parameter Ledger
free parameters (2)
- latent dimension
- autoencoder architecture and training hyperparameters
axioms (2)
- domain assumption A low-dimensional latent state exists that captures the essential periodic hybrid dynamics of the locomotion system.
- domain assumption Lyapunov analysis performed in latent space yields a region whose image under the decoder is meaningful for the full-order system.
Reference graph
Works this paper leans on
-
[1]
2018 , publisher=
Feedback control of dynamic bipedal robot locomotion , author=. 2018 , publisher=
2018
-
[2]
Veer and Rakesh and I
S. Veer and Rakesh and I. Poulakakis , title =. IEEE Trans. Autom. Ctrl. , year =
-
[3]
IEEE Trans
Rapidly exponentially stabilizing control lyapunov functions and hybrid zero dynamics , author=. IEEE Trans. Autom. Ctrl. , volume=
-
[4]
IEEE Transactions on Automatic Control , volume=
Hybrid zero dynamics of planar biped walkers , author=. IEEE Transactions on Automatic Control , volume=. 2003 , publisher=
2003
-
[5]
arXiv preprint arXiv:2505.23210 , year=
Latent Representations for Control Design with Provable Stability and Safety Guarantees , author=. arXiv preprint arXiv:2505.23210 , year=
-
[6]
and Weng, Bowen and Zhang, Wei and Hereid, Ayonga , booktitle=
Castillo, Guillermo A. and Weng, Bowen and Zhang, Wei and Hereid, Ayonga , booktitle=. Data-Driven Latent Space Representation for Robust Bipedal Locomotion Learning , year=
-
[7]
Li, Chenhao and Stanger-Jones, Elijah and Heim, Steve and Kim, Sangbae , journal=
-
[8]
Deepphase: periodic autoencoders for learning motion phase manifolds,
Starke, Sebastian and Mason, Ian and Komura, Taku , title =. ACM Trans. Graph. , month = jul, articleno =. 2022 , issue_date =. doi:10.1145/3528223.3530178 , abstract =
-
[9]
Beyond Inverted Pendulums: Task-Optimal Simple Models of Legged Locomotion , year=
Chen, Yu-Ming and Hu, Jianshu and Posa, Michael , journal=. Beyond Inverted Pendulums: Task-Optimal Simple Models of Legged Locomotion , year=
-
[10]
Reinforcement Learning for Reduced-order Models of Legged Robots , year=
Chen, Yu-Ming and Bui, Hien and Posa, Michael , booktitle=. Reinforcement Learning for Reduced-order Models of Legged Robots , year=
-
[11]
3-D Underactuated Bipedal Walking via H-LIP Based Gait Synthesis and Stepping Stabilization , year=
Xiong, Xiaobin and Ames, Aaron , journal=. 3-D Underactuated Bipedal Walking via H-LIP Based Gait Synthesis and Stepping Stabilization , year=
-
[12]
1965 , publisher=
Topology from the differentiable viewpoint , author=. 1965 , publisher=
1965
-
[13]
2013 , publisher=
A course in robust control theory: a convex approach , author=. 2013 , publisher=
2013
-
[14]
1994 , publisher=
Normally hyperbolic invariant manifolds in dynamical systems , author=. 1994 , publisher=
1994
-
[15]
1974 , publisher=
Differential topology , author=. 1974 , publisher=
1974
-
[16]
Journal of the American Mathematical Society , volume=
Testing the manifold hypothesis , author=. Journal of the American Mathematical Society , volume=
-
[17]
2013 , publisher=
Introduction to Smooth Manifolds , author=. 2013 , publisher=
2013
-
[18]
2025 , eprint=
Autoencoding Dynamics: Topological Limitations and Capabilities , author=. 2025 , eprint=
2025
-
[19]
Haller and P
G. Haller and P. Ponsioen , title =. Nonlinear Dynamics , year =
-
[20]
Orbit: A Unified Simulation Framework for Interactive Robot Learning Environments , year=
Mittal, Mayank and Yu, Calvin and Yu, Qinxi and Liu, Jingzhou and Rudin, Nikita and Hoeller, David and Yuan, Jia Lin and Singh, Ritvik and Guo, Yunrong and Mazhar, Hammad and Mandlekar, Ajay and Babich, Buck and State, Gavriel and Hutter, Marco and Garg, Animesh , journal=. Orbit: A Unified Simulation Framework for Interactive Robot Learning Environments , year=
-
[21]
Rsl-rl: A learning library for robotics research.arXiv preprint arXiv:2509.10771, 2025
RSL-RL: A Learning Library for Robotics Research , author=. arXiv preprint arXiv:2509.10771 , year=
-
[22]
Daniel Freeman and Erik Frey and Anton Raichuk and Sertan Girgin and Igor Mordatch and Olivier Bachem , title =
C. Daniel Freeman and Erik Frey and Anton Raichuk and Sertan Girgin and Igor Mordatch and Olivier Bachem , title =
-
[23]
Tabuada , title =
P. Tabuada , title =
-
[24]
Nakamura and L
K. Nakamura and L. Peters and A. Bajcsy , title =. Robotics: Science and Systems , year =
-
[25]
A. C. Antoulas , title =
-
[26]
2012 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages=
MuJoCo: A physics engine for model-based control , author=. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages=. 2012 , organization=
2012
-
[27]
Astolfi , title =
A. Astolfi , title =. IEEE Transactions on Automatic Control , year =
-
[28]
Girard and G
A. Girard and G. J. Pappas , title =. Automatica , year =
-
[29]
Kajita, Shuuji and Kanehiro, Fumio and Kaneko, Kenji and Yokoi, Kazuhito and Hirukawa, Hirohisa , booktitle=. The 3. 2001 , organization=
2001
-
[30]
IEEE Transactions on Robotics , volume=
3-d underactuated bipedal walking via h-lip based gait synthesis and stepping stabilization , author=. IEEE Transactions on Robotics , volume=. 2022 , publisher=
2022
-
[31]
arXiv preprint arXiv:2008.10763 , year=
Angular momentum about the contact point for control of bipedal locomotion: Validation in a lip-based controller , author=. arXiv preprint arXiv:2008.10763 , year=
-
[32]
2024 American Control Conference (ACC) , pages=
Multi-domain walking with reduced-order models of locomotion , author=. 2024 American Control Conference (ACC) , pages=. 2024 , organization=
2024
-
[33]
Journal of biomechanics , volume=
The spring-mass model for running and hopping , author=. Journal of biomechanics , volume=. 1989 , publisher=
1989
-
[34]
1986 , publisher=
Legged robots that balance , author=. 1986 , publisher=
1986
-
[35]
Benner and S
P. Benner and S. Gugercin and K. Wilcox , title =. SIAM Review , year =
-
[36]
S. L. Brunton and J. N. Kutz , title =
-
[37]
Wensing and S
P. Wensing and S. Revzen , title =. Bioinspired Legged Locomotion , year =
-
[38]
2014 , publisher=
Optimization models , author=. 2014 , publisher=
2014
-
[39]
2026 , eprint=
mjlab: A Lightweight Framework for GPU-Accelerated Robot Learning , author=. 2026 , eprint=
2026
-
[40]
Adam: A Method for Stochastic Optimization
Adam: A method for stochastic optimization , author=. arXiv preprint arXiv:1412.6980 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[41]
Jonathan Heek and Anselm Levskaya and Avital Oliver and Marvin Ritter and Bertrand Rondepierre and Andreas Steiner and Marc van
-
[42]
James Bradbury and Roy Frostig and Peter Hawkins and Matthew James Johnson and Yash Katariya and Chris Leary and Dougal Maclaurin and George Necula and Adam Paszke and Jake Vander
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.