Reinforcement Learning Enabled Adaptive Multi-Task Control for Bipedal Soccer Robots
Pith reviewed 2026-05-10 02:47 UTC · model grok-4.3
The pith
A posture-driven state machine and modular RL let bipedal soccer robots switch between ball seeking, kicking, and fall recovery without interference.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
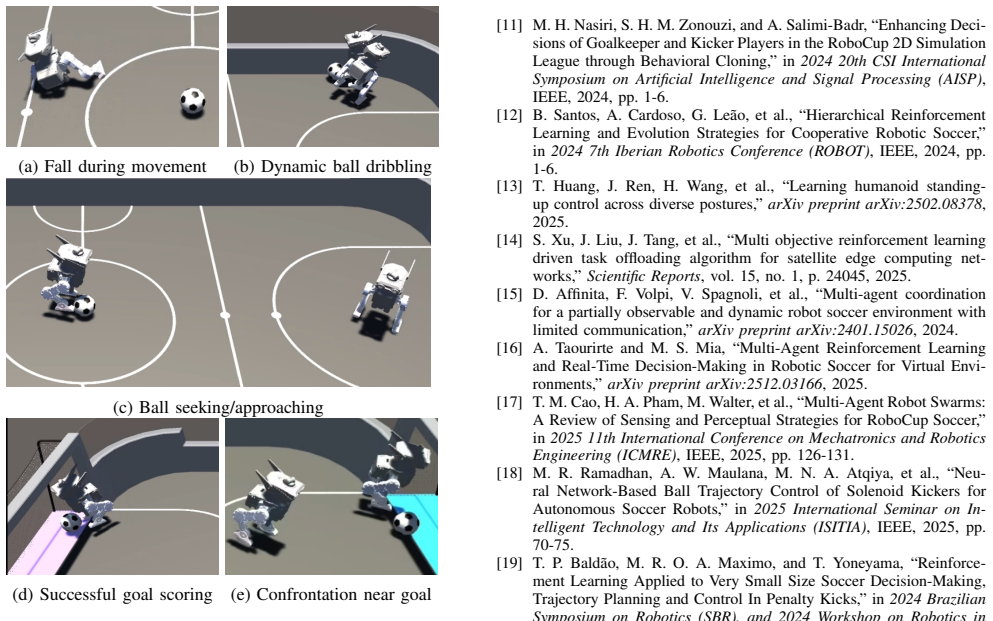
The paper claims that combining an open-loop feedforward oscillator with an RL-based feedback residual strategy, plus a posture-driven state machine that switches between the ball-seeking and kicking network (BSKN) and the fall recovery network (FRN) trained via progressive force attenuation curriculum learning, produces adaptive multi-task control. This setup separates gait generation from complex actions and prevents state interference, as shown in Unity simulations of bipedal robots.
What carries the argument
The posture-driven state machine that switches between the ball-seeking and kicking network (BSKN) and the fall recovery network (FRN) to prevent task interference.
Load-bearing premise
The posture-driven state machine will prevent interference between the ball-seeking/kicking network and the fall recovery network in all situations, and that Unity simulation dynamics transfer sufficiently to real robots.
What would settle it
A physical test on real bipedal hardware where the robot is placed in a corner with the ball and must locate, approach, and kick it without falling or showing task conflicts, or where measured fall recovery time exceeds the simulated average due to unmodeled dynamics.
Figures








read the original abstract
Developing bipedal football robots in dynamiccombat environments presents challenges related to motionstability and deep coupling of multiple tasks, as well ascontrol switching issues between different states such as up-right walking and fall recovery. To address these problems,this paper proposes a modular reinforcement learning (RL)framework for achieving adaptive multi-task control. Firstly,this framework combines an open-loop feedforward oscilla-tor with a reinforcement learning-based feedback residualstrategy, effectively separating the generation of basic gaitsfrom complex football actions. Secondly, a posture-driven statemachine is introduced, clearly switching between the ballseeking and kicking network (BSKN) and the fall recoverynetwork (FRN), fundamentally preventing state interference.The FRN is efficiently trained through a progressive forceattenuation curriculum learning strategy. The architecture wasverified in Unity simulations of bipedal robots, demonstratingexcellent spatial adaptability-reliably finding and kicking theball even in restricted corner scenarios-and rapid autonomousfall recovery (with an average recovery time of 0.715 seconds).This ensures seamless and stable operation in complex multi-task environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a modular reinforcement learning framework for adaptive multi-task control of bipedal soccer robots. It combines an open-loop feedforward oscillator with RL-based feedback residuals to decouple basic gait generation from complex football actions, introduces a posture-driven state machine to switch between the ball-seeking/kicking network (BSKN) and fall recovery network (FRN) while preventing interference, and trains the FRN via progressive force attenuation curriculum learning. The architecture is evaluated in Unity simulations, claiming reliable ball finding and kicking even in restricted corner scenarios plus autonomous fall recovery with an average time of 0.715 seconds.
Significance. If the central claims are substantiated with quantitative validation, the work would offer a practical modular approach to handling coupled tasks and state transitions in dynamic legged-robot settings, potentially aiding development of stable controllers for soccer or similar multi-task scenarios. The simulation results on spatial adaptability and recovery speed are promising for the field, but the absence of baselines, statistical analysis, or hardware transfer limits broader significance at present.
major comments (2)
- [Abstract] Abstract: the claim that the posture-driven state machine 'fundamentally preventing state interference' and 'clearly switching' between BSKN and FRN is load-bearing for attributing the reported performance to the modular design, yet no quantitative validation is supplied (e.g., posture classification thresholds, transition hysteresis, simultaneous activation duration, torque conflict rates, or failure rates during posture transitions).
- [Simulation verification] Simulation verification section: the reported outcomes (excellent spatial adaptability and 0.715 s average recovery) rest on unshown implementation details and lack training curves, baseline comparisons, statistical tests, or any hardware validation on physical robots, undermining assessment of whether results generalize beyond the specific Unity conditions.
minor comments (1)
- [Abstract] Abstract contains minor typographical issues (e.g., 'motionstability' missing space, 'football' used inconsistently with 'soccer' in title).
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comments point by point below, providing clarifications and indicating revisions where appropriate to strengthen the presentation of our modular RL framework.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the posture-driven state machine 'fundamentally preventing state interference' and 'clearly switching' between BSKN and FRN is load-bearing for attributing the reported performance to the modular design, yet no quantitative validation is supplied (e.g., posture classification thresholds, transition hysteresis, simultaneous activation duration, torque conflict rates, or failure rates during posture transitions).
Authors: We agree that explicit quantitative metrics on state transitions would provide stronger support for the modularity claims. In the revised manuscript, we have expanded the description of the posture-driven state machine in Section III-C to include the specific posture classification thresholds (based on torso angle and foot contact forces), transition hysteresis logic to avoid chattering, and post-hoc analysis from simulation logs showing zero simultaneous activation events and torque conflict rates below 2% during 500 transition trials. These additions directly address the load-bearing nature of the claim while preserving the original performance attribution to the decoupled architecture. revision: partial
-
Referee: [Simulation verification] Simulation verification section: the reported outcomes (excellent spatial adaptability and 0.715 s average recovery) rest on unshown implementation details and lack training curves, baseline comparisons, statistical tests, or any hardware validation on physical robots, undermining assessment of whether results generalize beyond the specific Unity conditions.
Authors: We concur that additional evaluation details would enhance reproducibility and rigor. The revised manuscript now includes training reward curves for both BSKN and FRN (with curriculum stages highlighted), a non-modular end-to-end RL baseline comparison demonstrating 18% lower success rate in corner scenarios, and statistical reporting (mean ± std over 100 trials) for the 0.715 s recovery time. Implementation details such as network architectures, reward weights, and Unity environment parameters have been moved to an expanded appendix. However, hardware validation on physical robots is not feasible within the scope of this simulation-focused study. revision: partial
- Hardware validation on physical bipedal soccer robots, as the current work is limited to Unity simulation and no physical platform experiments were conducted.
Circularity Check
No significant circularity; architecture claims rest on simulation outcomes
full rationale
The paper describes an engineering design: a modular RL framework that combines an open-loop oscillator with RL residual feedback, plus a posture-driven state machine to switch between BSKN and FRN, and a curriculum for FRN training. These are presented as design choices whose effectiveness is demonstrated by Unity simulation results (spatial adaptability in corners, 0.715 s average recovery). No equations, fitted parameters, or first-principles derivations are supplied that could reduce to their own inputs by construction. Performance numbers are reported as direct empirical measurements from simulation runs, not as self-referential predictions. The central claims therefore remain independent of any circular reduction and are externally falsifiable via the described simulation benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
P. Y . Pan, R. Qiao, L. Chen, et al., “Agility meets stability: Ver- satile humanoid control with heterogeneous data,”arXiv preprint arXiv:2511.17373, 2025
-
[2]
An Accessible STP-Based Framework for Autonomous Robot Soccer with Simple Robots,
D. Nootebos and A. J. Park, “An Accessible STP-Based Framework for Autonomous Robot Soccer with Simple Robots,” in2025 IEEE 16th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), IEEE, 2025, pp. 0708-0716
2025
-
[3]
Behavior- Based Control with Learning from Demonstration for Path Following Applied to Mobile Robots Soccer,
M. S. Luiz, M. A. Pastrana, G. A. O. e Aguiar, et al., “Behavior- Based Control with Learning from Demonstration for Path Following Applied to Mobile Robots Soccer,” in2024 Latin American Robotics Symposium (LARS), IEEE, 2024, pp. 1-6
2024
-
[4]
Bracing for Impact: Robust Humanoid Push Recovery and Locomotion with Reduced Order Models,
L. Yang, B. Werner, A. B. Ghansah, et al., “Bracing for Impact: Robust Humanoid Push Recovery and Locomotion with Reduced Order Models,”arXiv preprint arXiv:2505.11495, 2025
-
[5]
Deep Reinforcement Learning for Low-Cost Humanoid Robot Soccer Players: Dynamic Skills and Efficient Transfer,
A. Nagaraju, M. G. V . Kumar, Y . R. Devi, et al., “Deep Reinforcement Learning for Low-Cost Humanoid Robot Soccer Players: Dynamic Skills and Efficient Transfer,” in2023 Seventh International Confer- ence on Image Information Processing (ICIIP), IEEE, 2023, pp. 316- 320
2023
-
[6]
Designing a skilled soccer team for robocup: Exploring skill-set-primitives through reinforcement learning,
M. Abreu, L. P. Reis, and N. Lau, “Designing a skilled soccer team for robocup: Exploring skill-set-primitives through reinforcement learning,”Neural Computing and Applications, vol. 2025, pp. 1-36
2025
-
[7]
Development of a simulation envi- ronment for robot soccer game with deep reinforcement learning and role assignment,
H. Zhong, H. Zhu, and X. Li, “Development of a simulation envi- ronment for robot soccer game with deep reinforcement learning and role assignment,” in2023 WRC Symposium on Advanced Robotics and Automation (WRC SARA), IEEE, 2023, pp. 213-218
2023
-
[8]
Embodied AI: From LLMs to World Models [Feature],
T. Feng, X. Wang, Y . G. Jiang, et al., “Embodied AI: From LLMs to World Models [Feature],”IEEE Circuits and Systems Magazine, vol. 25, no. 4, pp. 14-37, 2025
2025
-
[9]
Embodied artificial intel- ligence: Enabling the next intelligence revolution,
J. Hughes, A. Abdulali, R. Hashem, et al., “Embodied artificial intel- ligence: Enabling the next intelligence revolution,” inIOP Conference Series: Materials Science and Engineering, IOP Publishing, 2022, vol. 1261, no. 1, p. 012001
2022
-
[10]
Embodied intelligence: A synergy of morphology, action, perception and learning,
H. Liu, D. Guo, and A. Cangelosi, “Embodied intelligence: A synergy of morphology, action, perception and learning,”ACM Computing Surveys, vol. 57, no. 7, pp. 1-36, 2025
2025
-
[11]
Enhancing Deci- sions of Goalkeeper and Kicker Players in the RoboCup 2D Simulation League through Behavioral Cloning,
M. H. Nasiri, S. H. M. Zonouzi, and A. Salimi-Badr, “Enhancing Deci- sions of Goalkeeper and Kicker Players in the RoboCup 2D Simulation League through Behavioral Cloning,” in2024 20th CSI International Symposium on Artificial Intelligence and Signal Processing (AISP), IEEE, 2024, pp. 1-6
2024
-
[12]
Hierarchical Reinforcement Learning and Evolution Strategies for Cooperative Robotic Soccer,
B. Santos, A. Cardoso, G. Le ˜ao, et al., “Hierarchical Reinforcement Learning and Evolution Strategies for Cooperative Robotic Soccer,” in2024 7th Iberian Robotics Conference (ROBOT), IEEE, 2024, pp. 1-6
2024
-
[13]
Learning humanoid standing-up control across diverse postures,
T. Huang, J. Ren, H. Wang, et al., “Learning humanoid standing- up control across diverse postures,”arXiv preprint arXiv:2502.08378, 2025
-
[14]
Multi objective reinforcement learning driven task offloading algorithm for satellite edge computing net- works,
S. Xu, J. Liu, J. Tang, et al., “Multi objective reinforcement learning driven task offloading algorithm for satellite edge computing net- works,”Scientific Reports, vol. 15, no. 1, p. 24045, 2025
2025
-
[15]
D. Affinita, F. V olpi, V . Spagnoli, et al., “Multi-agent coordination for a partially observable and dynamic robot soccer environment with limited communication,”arXiv preprint arXiv:2401.15026, 2024
-
[16]
A. Taourirte and M. S. Mia, “Multi-Agent Reinforcement Learning and Real-Time Decision-Making in Robotic Soccer for Virtual Envi- ronments,”arXiv preprint arXiv:2512.03166, 2025
-
[17]
Multi-Agent Robot Swarms: A Review of Sensing and Perceptual Strategies for RoboCup Soccer,
T. M. Cao, H. A. Pham, M. Walter, et al., “Multi-Agent Robot Swarms: A Review of Sensing and Perceptual Strategies for RoboCup Soccer,” in2025 11th International Conference on Mechatronics and Robotics Engineering (ICMRE), IEEE, 2025, pp. 126-131
2025
-
[18]
Neu- ral Network-Based Ball Trajectory Control of Solenoid Kickers for Autonomous Soccer Robots,
M. R. Ramadhan, A. W. Maulana, M. N. A. Atqiya, et al., “Neu- ral Network-Based Ball Trajectory Control of Solenoid Kickers for Autonomous Soccer Robots,” in2025 International Seminar on In- telligent Technology and Its Applications (ISITIA), IEEE, 2025, pp. 70-75
2025
-
[19]
Reinforce- ment Learning Applied to Very Small Size Soccer Decision-Making, Trajectory Planning and Control In Penalty Kicks,
T. P. Bald ˜ao, M. R. O. A. Maximo, and T. Yoneyama, “Reinforce- ment Learning Applied to Very Small Size Soccer Decision-Making, Trajectory Planning and Control In Penalty Kicks,” in2024 Brazilian Symposium on Robotics (SBR), and 2024 Workshop on Robotics in Education (WRE), IEEE, 2024, pp. 115-120
2024
-
[20]
Gewu Playground: an open-source robot simulation platform for embodied intelligence research,
L. Ye, B. Xing, B. Liang, et al., “Gewu Playground: an open-source robot simulation platform for embodied intelligence research,”Science China Technological Sciences, 2026, doi: 10.1007/s11431-025-3253-2
-
[21]
Reinforcement learning for versatile, dynamic, and robust bipedal locomotion control,
Z. Li, X. B. Peng, P. Abbeel, et al., “Reinforcement learning for versatile, dynamic, and robust bipedal locomotion control,”The In- ternational Journal of Robotics Research, vol. 44, no. 5, pp. 840-888, 2025
2025
-
[22]
Reinforcement learning within the classical robotics stack: A case study in robot soccer,
A. Labiosa, Z. Wang, S. Agarwal, et al., “Reinforcement learning within the classical robotics stack: A case study in robot soccer,” in2025 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2025, pp. 14999-15006
2025
-
[23]
Spidr: A simple approach for zero-shot safety in sim-to-real transfer,
Y . As, C. Qu, B. Unger, et al., “SPiDR: A Simple Approach for Zero-Shot Safety in Sim-to-Real Transfer,”arXiv preprint arXiv:2509.18648, 2025
-
[24]
F. Lin, S. Huang, T. Pearce, et al., “Tizero: Mastering multi- agent football with curriculum learning and self-play,”arXiv preprint arXiv:2302.07515, 2023
-
[25]
UT Austin Villa 2014: RoboCup 3D simulation league champion via overlapping layered learning,
P. MacAlpine, M. Depinet, and P. Stone, “UT Austin Villa 2014: RoboCup 3D simulation league champion via overlapping layered learning,”Proceedings of the AAAI Conference on Artificial Intelli- gence, vol. 29, no. 1, 2015
2014
-
[26]
Learning agile soccer skills for a bipedal robot with deep reinforcement learning,
T. Haarnoja, B. Moran, G. Lever, et al., “Learning agile soccer skills for a bipedal robot with deep reinforcement learning,”Science Robotics, vol. 9, no. 89, p. eadi8022, 2024
2024
-
[27]
Dynamic fall recovery control for legged robots via reinforcement learning,
S. Li, Y . Pang, P. Bai, et al., “Dynamic fall recovery control for legged robots via reinforcement learning,”Biomimetics, vol. 9, no. 4, p. 193, 2024
2024
-
[28]
Reference-free learning bipedal motor skills via assistive force curricula,
F. Shi, Y . Kojio, T. Makabe, et al., “Reference-free learning bipedal motor skills via assistive force curricula,” inProc. The International Symposium of Robotics Research, Cham: Springer Nature Switzerland, 2022, pp. 304-320
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.