Recognition: unknown
Mind2Drive: Predicting Driver Intentions from EEG in Real-world On-Road Driving
Pith reviewed 2026-05-10 02:26 UTC · model grok-4.3
The pith
EEG signals recorded in real on-road driving can predict upcoming driver maneuvers up to one second in advance with over 90 percent accuracy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
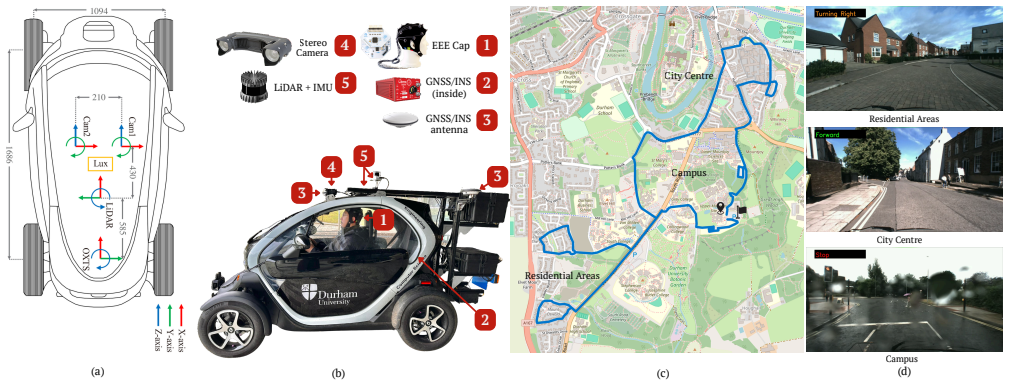
A synchronized EEG and vehicle-sensor platform installed in an electric car collected data across 32 on-road sessions; among twelve evaluated deep-learning architectures, TSCeption delivered the highest average accuracy of 0.907 and Macro-F1 score of 0.901, with decoding performance remaining stable when predictions were issued as early as 1000 ms before maneuver execution and reaching maximum reliability in the 400-600 ms preparatory interval.
What carries the argument
The TSCeption deep-learning architecture applied to minimally preprocessed multi-channel EEG time series to classify upcoming driving maneuvers in real time.
If this is right
- Vehicle safety systems could issue warnings or partial interventions hundreds of milliseconds earlier than current sensor-only methods.
- Minimal EEG preprocessing pipelines become preferable to complex artifact-removal stages for on-road deployment.
- Prediction reliability concentrates in the 400-600 ms pre-maneuver window, matching known neural preparation phases.
- The framework remains usable even when the exact timing of the maneuver is uncertain within a one-second horizon.
Where Pith is reading between the lines
- Integration with existing vehicle cameras and radar could create hybrid intention predictors that are more robust than either modality alone.
- Personalized calibration on a short initial drive might further reduce errors caused by individual differences in EEG patterns.
- Extension to other high-stakes control tasks, such as operating heavy machinery, becomes plausible once similar real-world datasets are collected.
Load-bearing premise
EEG signals captured during normal on-road driving contain clean, intention-specific patterns that survive motion artifacts, road noise, and differences between drivers.
What would settle it
A drop in accuracy below 80 percent when the same models are tested on a fresh set of drivers or on roads with substantially different traffic density and surface conditions from the original 32 sessions.
Figures



read the original abstract
Predicting driver intention from neurophysiological signals offers a promising pathway for enhancing proactive safety in advanced driver assistance systems, yet remains challenging in real-world driving due to EEG signal non-stationarity and the complexity of cognitive-motor preparation. This study proposes and evaluates an EEG-based driver intention prediction framework using a synchronised multi-sensor platform integrated into a real electric vehicle. A real-world on-road dataset was collected across 32 driving sessions, and 12 deep learning architectures were evaluated under consistent experimental conditions. Among the evaluated architectures, TSCeption achieved the highest average accuracy (0.907) and Macro-F1 score (0.901). The proposed framework demonstrates strong temporal stability, maintaining robust decoding performance up to 1000 ms before manoeuvre execution with minimal degradation. Furthermore, additional analyses reveal that minimal EEG preprocessing outperforms artefact-handling pipelines, and prediction performance peaks within a 400-600 ms interval, corresponding to a critical neural preparatory phase preceding driving manoeuvres. Overall, these findings support the feasibility of early and stable EEG-based driver intention decoding under real-world on-road conditions. Code: https://github.com/galosaimi/Mind2Drive.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to demonstrate the feasibility of predicting driver intentions from EEG signals in real-world on-road driving conditions. By collecting data from 32 driving sessions using a multi-sensor platform in an electric vehicle, they evaluate 12 deep learning models, finding that TSCeption achieves the best performance with 0.907 accuracy and 0.901 Macro-F1 score. The framework maintains robust performance up to 1000 ms before maneuvers, with peak in 400-600 ms, and minimal preprocessing is shown to be superior to artifact removal methods.
Significance. If the results hold after addressing potential confounds, this work would be significant for brain-computer interfaces in automotive safety, providing empirical evidence on real-world EEG for early maneuver prediction. The multi-architecture comparison and temporal analysis are valuable contributions, and the open-sourced code enhances reproducibility.
major comments (3)
- [Results section] Results section (performance metrics and preprocessing comparison): The finding that minimal preprocessing outperforms artifact-handling pipelines (yielding TSCeption's 0.907 accuracy and 0.901 Macro-F1) is load-bearing for the central claim of EEG-based neural intention decoding. However, real on-road EEG is dominated by motion, EMG, and impedance artifacts whose statistics align with preparatory phases before maneuvers; without controls such as correlation analysis with auxiliary sensors or sham conditions, the high performance may reflect confounds rather than preparatory brain activity.
- [Methods section] Methods section: The manuscript lacks essential details on the number of samples per maneuver class, the cross-validation strategy (e.g., leave-one-subject-out vs. within-subject), and any statistical significance testing of the reported metrics. These omissions make it difficult to assess whether the temporal stability claim (robust decoding to 1000 ms pre-maneuver) generalizes given only 32 sessions and known high inter-subject EEG variability.
- [Results section] Analysis of temporal performance: The assertion of strong temporal stability up to 1000 ms before manoeuvre execution (with peak at 400-600 ms) requires explicit validation that the learned features are not driven by non-stationary artifacts (e.g., postural adjustments or electrode motion) that occur in the same window; no such disambiguation is described.
minor comments (2)
- [Abstract] The abstract would benefit from specifying the number of subjects and total labeled maneuvers to better contextualize dataset scale and class balance.
- [Methods section] Notation for time windows (e.g., the 400-600 ms interval) could be defined more explicitly in the methods for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback, which helps strengthen the manuscript. We address each major comment point by point below, providing clarifications from the existing analyses and indicating where revisions will be made to improve transparency and address potential confounds.
read point-by-point responses
-
Referee: [Results section] Results section (performance metrics and preprocessing comparison): The finding that minimal preprocessing outperforms artifact-handling pipelines (yielding TSCeption's 0.907 accuracy and 0.901 Macro-F1) is load-bearing for the central claim of EEG-based neural intention decoding. However, real on-road EEG is dominated by motion, EMG, and impedance artifacts whose statistics align with preparatory phases before maneuvers; without controls such as correlation analysis with auxiliary sensors or sham conditions, the high performance may reflect confounds rather than preparatory brain activity.
Authors: We agree that ruling out confounds is critical for the central claim. Our multi-sensor platform recorded auxiliary IMU, vehicle telemetry, and video data synchronized with EEG, allowing post-hoc checks. The observed performance peak at 400-600 ms aligns with established neural preparatory signatures (e.g., readiness potential and mu/beta desynchronization) rather than immediate postural or motion artifacts, which typically occur closer to maneuver onset. We will add a new Results subsection with Pearson correlations between EEG-derived features and auxiliary motion signals across time windows, plus a control using post-maneuver EEG segments. These additions will quantify the contribution of non-neural sources. Sham conditions are not feasible in this on-road dataset, but we will explicitly discuss this limitation and its implications for interpretation. revision: partial
-
Referee: [Methods section] Methods section: The manuscript lacks essential details on the number of samples per maneuver class, the cross-validation strategy (e.g., leave-one-subject-out vs. within-subject), and any statistical significance testing of the reported metrics. These omissions make it difficult to assess whether the temporal stability claim (robust decoding to 1000 ms pre-maneuver) generalizes given only 32 sessions and known high inter-subject EEG variability.
Authors: We acknowledge these omissions reduce clarity. The dataset comprises 32 sessions from 8 drivers (4 sessions each), with class distributions as follows: left turns (N=1248), right turns (N=1196), lane changes (N=872), and straight driving (N=2456) after segmentation. We employed within-subject, leave-one-session-out cross-validation to respect inter-session variability while leveraging multiple sessions per driver. Statistical significance was assessed via repeated-measures ANOVA and post-hoc paired t-tests with Bonferroni correction across models and time windows (all p<0.01 for TSCeption superiority). We will insert these details into the Methods section, add a table of sample counts, and report the full statistical results in the revised Results. revision: yes
-
Referee: [Results section] Analysis of temporal performance: The assertion of strong temporal stability up to 1000 ms before manoeuvre execution (with peak at 400-600 ms) requires explicit validation that the learned features are not driven by non-stationary artifacts (e.g., postural adjustments or electrode motion) that occur in the same window; no such disambiguation is described.
Authors: To disambiguate neural from artifactual contributions, we will augment the temporal analysis with two controls in the revision: (1) gradient-based saliency maps from TSCeption highlighting that discriminative features concentrate in frontal-central electrodes and 8-30 Hz bands consistent with motor preparation, and (2) a label-shuffling baseline showing accuracy drops to chance (~25%) when temporal structure is destroyed. These will be presented alongside the existing 1000 ms stability curves to demonstrate that performance is driven by preparatory dynamics rather than non-stationary artifacts in the pre-maneuver window. revision: yes
Circularity Check
No circularity: purely empirical ML evaluation on new real-world dataset
full rationale
The paper reports collection of a new 32-session on-road EEG dataset and standard supervised evaluation of 12 deep learning models (TSCeption best at 0.907 accuracy) against ground-truth maneuver labels. No derivation, theorem, or ansatz is presented whose output is forced by construction from its own inputs or prior self-citations. Performance claims rest on cross-validation and temporal-window analysis that are externally verifiable via the released code; they do not reduce to fitted parameters renamed as predictions or self-referential definitions.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption EEG signals contain detectable information about upcoming motor intentions even in noisy real-world driving conditions.
Reference graph
Works this paper leans on
-
[1]
Driving intention understanding for autonomous vehicles: Current approaches and beyond,
Y . Xia, N. Xie, L. Li, P. Angeloudis, D.-H. Lee, and X. M. Chen, “Driving intention understanding for autonomous vehicles: Current approaches and beyond,”Device, vol. 2, no. 10, 2024
2024
-
[2]
EEG-based emer- gency braking intention detection during simulated driving,
X. Liang, Y . Yu, Y . Liu, K. Liu, Y . Liu, and Z. Zhou, “EEG-based emer- gency braking intention detection during simulated driving,”BioMedical Engineering OnLine, vol. 22, no. 1, p. 65, 2023
2023
-
[3]
Driving intention recognition of surrounding vehicles based on a time-sequenced weights hidden markov model for autonomous driving,
P. Liu, T. Qu, H. Gao, and X. Gong, “Driving intention recognition of surrounding vehicles based on a time-sequenced weights hidden markov model for autonomous driving,”Sensors, vol. 23, no. 21, p. 8761, 2023
2023
-
[4]
J. Shi, Y . Lin, Y . Hua, Z. Wang, Z. Zhang, W. Zheng, Y . Song, K. Lu, and S. Lu, “Multi-scenario highway lane-change intention prediction: A physics-informed ai framework for three-class classification,”arXiv preprint arXiv:2509.17354, 2025
-
[5]
An integrated deep learning model for motor intention recognition of multi-class EEG signals in upper limb amputees,
O. P. Idowu, A. E. Ilesanmi, X. Li, O. W. Samuel, P. Fang, and G. Li, “An integrated deep learning model for motor intention recognition of multi-class EEG signals in upper limb amputees,”Computer methods and programs in biomedicine, vol. 206, p. 106121, 2021
2021
-
[6]
EEG-based brain- computer interface enables real-time robotic hand control at individual finger level,
Y . Ding, C. Udompanyawit, Y . Zhang, and B. He, “EEG-based brain- computer interface enables real-time robotic hand control at individual finger level,”Nature Communications, vol. 16, no. 1, pp. 1–20, 2025
2025
-
[7]
Prediction of driver intention using EEG and GSR signals for advanced driver assistance systems,
J. Li, Y . Liu, D. Hu, J. Sun, T. Zhou, L. Xu, and Y . Li, “Prediction of driver intention using EEG and GSR signals for advanced driver assistance systems,” inProceedings of the International Conference on Image Processing, Machine Learning and Pattern Recognition, 2024, pp. 355–363
2024
-
[8]
A multimodal physiological dataset for driving behaviour analysis,
X. Tao, D. Gao, W. Zhang, T. Liu, B. Du, S. Zhang, and Y . Qin, “A multimodal physiological dataset for driving behaviour analysis,” Scientific data, vol. 11, no. 1, p. 378, 2024
2024
-
[9]
Selecting methods for a modular EEG pre-processing pipeline: An objective comparison,
S. Coelli, A. Calcagno, C. M. Cassani, F. Temporiti, P. Reali, R. Gatti, M. Galli, and A. M. Bianchi, “Selecting methods for a modular EEG pre-processing pipeline: An objective comparison,”Biomedical Signal Processing and Control, vol. 90, p. 105830, 2024
2024
-
[10]
Few-shot trans- fer learning for individualized braking intent detection on neuromorphic hardware,
N. A. Lutes, V . S. S. Nadendla, and K. Krishnamurthy, “Few-shot trans- fer learning for individualized braking intent detection on neuromorphic hardware,”Journal of Neural Engineering, vol. 22, no. 1, p. 016041, 2025
2025
-
[11]
Enhancing end-to-end autonomous driving systems through synchronized human behavior data,
Y . Duan, Z. Zhuang, J. Zhou, Y .-C. Chang, Y .-K. Wang, and C.- T. Lin, “Enhancing end-to-end autonomous driving systems through synchronized human behavior data,” inProceedings of the 1st Inter- national Workshop on Brain-Computer Interfaces (BCI) for Multimedia Understanding, 2024, pp. 1–8
2024
-
[12]
Gelfree electrode cap guide,
OpenBCI, “Gelfree electrode cap guide,” https://docs.openbci.com/AddOns/Headwear/GelfreeElectrodeCap/ (Accessed 28/1/2026), 2026
2026
-
[13]
The PREP pipeline: standardized preprocessing for large-scale EEG analysis,
N. Bigdely-Shamlo, T. Mullen, C. Kothe, K.-M. Su, and K. A. Robbins, “The PREP pipeline: standardized preprocessing for large-scale EEG analysis,”Frontiers in neuroinformatics, vol. 9, p. 16, 2015
2015
-
[14]
Shredding artifacts: extracting brain activity in EEG from extreme artifacts during skateboarding using ASR and ICA,
D. E. Callan, J. J. Torre-Tresols, J. Laguerta, and S. Ishii, “Shredding artifacts: extracting brain activity in EEG from extreme artifacts during skateboarding using ASR and ICA,”Frontiers in neuroergonomics, vol. 5, p. 1358660, 2024
2024
-
[15]
The influence assessment of artifact subspace reconstruction on the EEG signal characteristics,
M. Plechawska-W ´ojcik, P. Augustynowicz, M. Kaczorowska, E. Zabielska-Mendyk, and D. Zapała, “The influence assessment of artifact subspace reconstruction on the EEG signal characteristics,” Applied Sciences, vol. 13, no. 3, p. 1605, 2023
2023
-
[16]
EEG decoding with spatiotemporal convolutional neural network for visualization and closed-loop control of sensorimotor activities: A simultaneous EEG- fMRI study,
S. Iwama, S. Tsuchimoto, N. Mizuguchi, and J. Ushiba, “EEG decoding with spatiotemporal convolutional neural network for visualization and closed-loop control of sensorimotor activities: A simultaneous EEG- fMRI study,”Human Brain Mapping, vol. 45, no. 9, p. e26767, 2024
2024
-
[17]
TSception: Capturing temporal dynamics and spatial asymmetry from EEG for emo- tion recognition,
Y . Ding, N. Robinson, S. Zhang, Q. Zeng, and C. Guan, “TSception: Capturing temporal dynamics and spatial asymmetry from EEG for emo- tion recognition,”IEEE Transactions on Affective Computing, vol. 14, no. 3, pp. 2238–2250, 2022
2022
-
[18]
Deep learning with convolutional neural networks for EEG decoding and visualization,
R. T. Schirrmeister, J. T. Springenberg, L. D. J. Fiederer, M. Glasstetter, K. Eggensperger, M. Tangermann, F. Hutter, W. Burgard, and T. Ball, “Deep learning with convolutional neural networks for EEG decoding and visualization,”Human brain mapping, vol. 38, no. 11, pp. 5391– 5420, 2017
2017
-
[19]
EEGNet: a compact convolutional neural network for EEG-based brain–computer interfaces,
V . J. Lawhern, A. J. Solon, N. R. Waytowich, S. M. Gordon, C. P. Hung, and B. J. Lance, “EEGNet: a compact convolutional neural network for EEG-based brain–computer interfaces,”Journal of neural engineering, vol. 15, no. 5, p. 056013, 2018
2018
-
[20]
Continuous convolutional neural network with 3D input for EEG-based emotion recognition,
Y . Yang, Q. Wu, Y . Fu, and X. Chen, “Continuous convolutional neural network with 3D input for EEG-based emotion recognition,” in International conference on neural information processing. Springer, 2018, pp. 433–443
2018
-
[21]
EEG emotion recognition using dynamical graph convolutional neural networks,
T. Song, W. Zheng, P. Song, and Z. Cui, “EEG emotion recognition using dynamical graph convolutional neural networks,”IEEE Transactions on Affective Computing, vol. 11, no. 3, pp. 532–541, 2018
2018
-
[22]
EEG motor imagery classification by feature extracted deep 1D-CNN and semi-deep fine- tuning,
M. Taghizadeh, F. Vaez, and M. Faezipour, “EEG motor imagery classification by feature extracted deep 1D-CNN and semi-deep fine- tuning,”IEEE Access, 2024
2024
-
[23]
GANSER: A self-supervised data augmentation framework for EEG-based emotion recognition,
Z. Zhang, Y . Liu, and S.-h. Zhong, “GANSER: A self-supervised data augmentation framework for EEG-based emotion recognition,”IEEE Transactions on Affective Computing, vol. 14, no. 3, pp. 2048–2063, 2022
2048
-
[24]
Investi- gating the temporal dynamics of electroencephalogram EEG microstates using recurrent neural networks,
A. Sikka, H. Jamalabadi, M. Krylova, S. Alizadeh, J. N. Van Der Meer, L. Danyeli, M. Deliano, P. Vicheva, T. Hahn, T. Koeniget al., “Investi- gating the temporal dynamics of electroencephalogram EEG microstates using recurrent neural networks,”Human brain mapping, vol. 41, no. 9, pp. 2334–2346, 2020
2020
-
[25]
Zhang and L
X. Zhang and L. Yao,Deep learning for EEG-based brain–computer interfaces: representations, algorithms and applications. World Scien- tific, 2021
2021
-
[26]
Attention-based convolutional neural network with multi-modal temporal information fusion for motor imagery EEG decoding,
X. Ma, W. Chen, Z. Pei, Y . Zhang, and J. Chen, “Attention-based convolutional neural network with multi-modal temporal information fusion for motor imagery EEG decoding,”Computers in Biology and Medicine, vol. 175, p. 108504, 2024
2024
-
[27]
EEG Conformer: Convolutional transformer for EEG decoding and visualization,
Y . Song, Q. Zheng, B. Liu, and X. Gao, “EEG Conformer: Convolutional transformer for EEG decoding and visualization,”IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 31, pp. 710–719, 2022
2022
-
[28]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
A. Dosovitskiy, L. Beyer, A. Kolesnikov, D. Weissenborn, X. Zhai, T. Unterthiner, M. Dehghani, M. Minderer, G. Heigold, S. Gellyet al., “An image is worth 16x16 words: Transformers for image recognition at scale,”arXiv preprint arXiv:2010.11929, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[29]
Time-series generative ad- versarial networks,
J. Yoon, D. Jarrett, and M. Van der Schaar, “Time-series generative ad- versarial networks,”Advances in neural information processing systems, vol. 32, 2019
2019
-
[30]
Action prediction based on anticipatory brain potentials during simu- lated driving,
Z. Khaliliardali, R. Chavarriaga, L. A. Gheorghe, and J. del R Mill ´an, “Action prediction based on anticipatory brain potentials during simu- lated driving,”Journal of neural engineering, vol. 12, no. 6, p. 066006, 2015
2015
-
[31]
EEG potentials predict upcoming emergency brakings during simulated driving,
S. Haufe, M. S. Treder, M. F. Gugler, M. Sagebaum, G. Curio, and B. Blankertz, “EEG potentials predict upcoming emergency brakings during simulated driving,”Journal of neural engineering, vol. 8, no. 5, p. 056001, 2011
2011
-
[32]
Time to move again: does the bereitschaftspotential covary with demands on internal timing?
R. Verleger, M. Haake, A. Baur, and K. ´Smigasiewicz, “Time to move again: does the bereitschaftspotential covary with demands on internal timing?”Frontiers in human neuroscience, vol. 10, p. 642, 2016
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.