Recognition: unknown
Multi-Cycle Spatio-Temporal Adaptation in Human-Robot Teaming
Pith reviewed 2026-05-10 02:19 UTC · model grok-4.3
The pith
RAPIDDS models individual human motion paths and task timings across repeated cycles to jointly adapt robot schedules and diffusion-based motions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
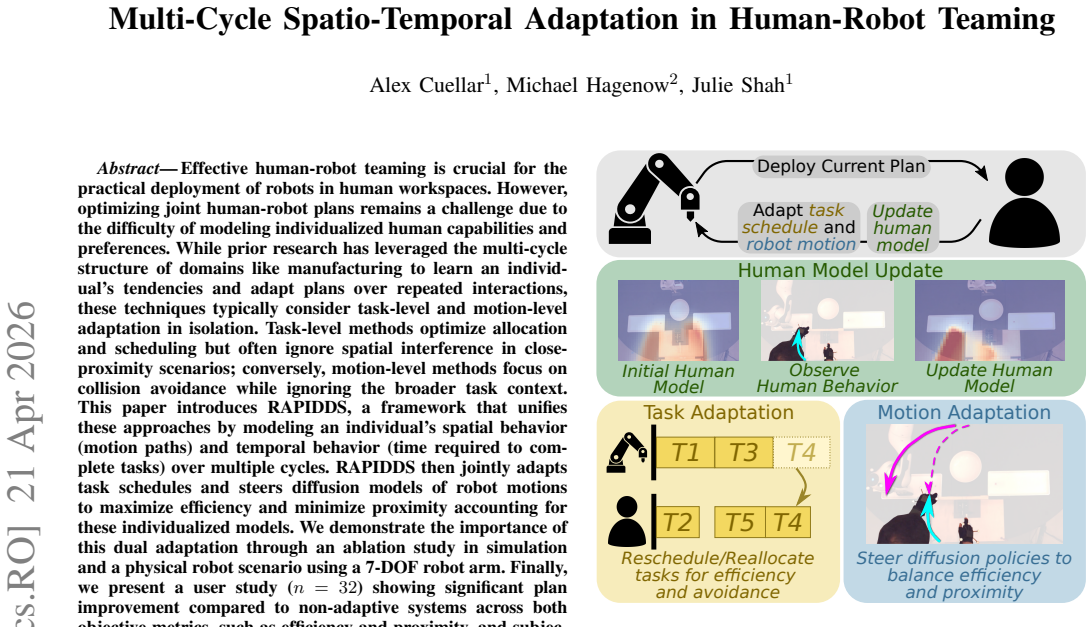
RAPIDDS unifies task-level and motion-level adaptation by modeling an individual's spatial behavior (motion paths) and temporal behavior (time required to complete tasks) over multiple cycles, then jointly adapts task schedules and steers diffusion models of robot motions to maximize efficiency and minimize proximity.
What carries the argument
RAPIDDS framework, which learns per-person spatial and temporal models from multi-cycle observations and performs joint schedule and diffusion-motion optimization.
If this is right
- Joint spatio-temporal adaptation outperforms separate task-only or motion-only methods, as measured in the ablation study.
- Objective metrics (efficiency, proximity) and subjective metrics (fluency, preference) both improve in physical user trials.
- The approach applies directly to close-proximity repetitive tasks such as manufacturing assembly.
Where Pith is reading between the lines
- The same cycle-based modeling could support longer-horizon adaptation in settings where humans and robots share space for days rather than minutes.
- Extending the diffusion steering to include predicted human fatigue or preference drift would test whether the current consistency assumption holds over more cycles.
- If the learned models prove stable, they could be shared across similar workers to reduce the number of cycles needed for initial adaptation.
Load-bearing premise
An individual's spatial behavior (motion paths) and temporal behavior (time required to complete tasks) remain sufficiently consistent across cycles to allow accurate modeling and effective joint adaptation.
What would settle it
A follow-up study in which participants deliberately alter their paths or timings between cycles, after which the adaptive system shows no improvement or degrades performance relative to a fixed non-adaptive plan.
Figures





read the original abstract
Effective human-robot teaming is crucial for the practical deployment of robots in human workspaces. However, optimizing joint human-robot plans remains a challenge due to the difficulty of modeling individualized human capabilities and preferences. While prior research has leveraged the multi-cycle structure of domains like manufacturing to learn an individual's tendencies and adapt plans over repeated interactions, these techniques typically consider task-level and motion-level adaptation in isolation. Task-level methods optimize allocation and scheduling but often ignore spatial interference in close-proximity scenarios; conversely, motion-level methods focus on collision avoidance while ignoring the broader task context. This paper introduces RAPIDDS, a framework that unifies these approaches by modeling an individual's spatial behavior (motion paths) and temporal behavior (time required to complete tasks) over multiple cycles. RAPIDDS then jointly adapts task schedules and steers diffusion models of robot motions to maximize efficiency and minimize proximity accounting for these individualized models. We demonstrate the importance of this dual adaptation through an ablation study in simulation and a physical robot scenario using a 7-DOF robot arm. Finally, we present a user study (n=32) showing significant plan improvement compared to non-adaptive systems across both objective metrics, such as efficiency and proximity, and subjective measures, including fluency and user preference. See this paper's companion video at: https://youtu.be/55Q3lq1fINs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces RAPIDDS, a framework for multi-cycle spatio-temporal adaptation in human-robot teaming. It models an individual's spatial behavior via motion paths and temporal behavior via task completion times across repeated cycles, then jointly optimizes task schedules and steers diffusion models for robot motions to maximize efficiency while minimizing proximity. Claims are supported by a simulation ablation study, physical experiments with a 7-DOF robot arm, and a user study (n=32) reporting significant improvements over non-adaptive baselines in objective metrics (efficiency, proximity) and subjective measures (fluency, user preference).
Significance. If the empirical results hold under closer scrutiny, the work could meaningfully advance practical human-robot collaboration in shared workspaces by unifying previously isolated task-level and motion-level adaptation approaches through per-user multi-cycle learning. The combination of ablation, physical robot validation, and a reasonably sized user study provides a solid empirical base for assessing applicability in domains like manufacturing.
major comments (2)
- [User Study] User Study section: Aggregate results from the n=32 study show improvements in efficiency, proximity, fluency, and preference, but no per-participant statistics or analysis of intra-cycle variance in motion paths or task times are reported. This directly bears on the central claim, as the framework relies on learning consistent individualized models; if intra-user variance is comparable to inter-user differences, the adaptation gains in later cycles cannot be expected to materialize as stated.
- [Modeling and Optimization] Modeling and Optimization section (around the joint adaptation description): The integration of the learned spatial/temporal models into the diffusion-based motion steering lacks explicit formulation (e.g., conditioning mechanism, loss terms, or how schedule constraints propagate to the diffusion process). Without this, it is difficult to verify that the claimed unification of task and motion levels is achieved without hidden assumptions or parameter fitting that reduces the approach to post-hoc adjustment.
minor comments (2)
- [Results] Figures in the results sections should include error bars, confidence intervals, or p-values for all reported metrics to allow assessment of effect sizes and variability.
- [Abstract and Introduction] The abstract and introduction use 'significant plan improvement' without specifying the statistical tests or thresholds applied in the user study; add this detail for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our contributions. We address each major point below and will incorporate revisions to strengthen the empirical support and technical clarity of the manuscript.
read point-by-point responses
-
Referee: [User Study] User Study section: Aggregate results from the n=32 study show improvements in efficiency, proximity, fluency, and preference, but no per-participant statistics or analysis of intra-cycle variance in motion paths or task times are reported. This directly bears on the central claim, as the framework relies on learning consistent individualized models; if intra-user variance is comparable to inter-user differences, the adaptation gains in later cycles cannot be expected to materialize as stated.
Authors: We agree that per-participant statistics and intra-cycle variance analysis are important for validating the individualized modeling assumption. The current manuscript focuses on aggregate metrics to demonstrate overall improvements, but we will add a new subsection in the user study results that reports per-participant efficiency and proximity gains across cycles, along with variance analysis (e.g., standard deviation of motion path deviations and task times within each user). This will include statistical comparison of inter- vs. intra-user variance to confirm that adaptation benefits in later cycles are justified by consistent per-user patterns. revision: yes
-
Referee: [Modeling and Optimization] Modeling and Optimization section (around the joint adaptation description): The integration of the learned spatial/temporal models into the diffusion-based motion steering lacks explicit formulation (e.g., conditioning mechanism, loss terms, or how schedule constraints propagate to the diffusion process). Without this, it is difficult to verify that the claimed unification of task and motion levels is achieved without hidden assumptions or parameter fitting that reduces the approach to post-hoc adjustment.
Authors: We appreciate this observation on the need for greater technical precision. The manuscript describes the joint optimization at a high level in the Modeling and Optimization section, but we acknowledge the integration details could be more explicit. In the revision, we will expand this section with formal equations: (1) the conditioning of the diffusion model on predicted human spatial paths and temporal durations via cross-attention layers, (2) the composite loss function combining task efficiency, proximity penalties, and diffusion denoising objectives, and (3) the propagation of schedule constraints as additional classifier-free guidance terms during the reverse diffusion process. These additions will make the unification of task- and motion-level adaptation fully verifiable without relying on implicit assumptions. revision: yes
Circularity Check
No significant circularity; empirical claims rest on independent user study data
full rationale
The paper's core contribution is an empirical framework (RAPIDDS) whose performance claims are grounded in a user study (n=32) and ablation studies comparing against non-adaptive baselines on objective and subjective metrics. No mathematical derivations, predictions, or first-principles results are described that reduce by the paper's own equations to quantities defined solely by fitted parameters or prior self-citations. Individual spatial/temporal models are learned from observed cycles and evaluated on held-out interactions, satisfying the requirement for independent validation steps.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Individual human spatial and temporal behaviors are sufficiently consistent across multiple cycles to support predictive modeling
Reference graph
Works this paper leans on
-
[1]
Contingent task and motion planning under uncertainty for human–robot interactions,
A. Akbari, M. Diab, and J. Rosell, “Contingent task and motion planning under uncertainty for human–robot interactions,”Applied Sciences, vol. 10, no. 5, p. 1665, 2020
2020
-
[2]
Unin- tentional entrainment effect in a context of human robot interaction: an experimental study,
E. Ansermin, G. Mostafaoui, X. Sargentini, and P. Gaussier, “Unin- tentional entrainment effect in a context of human robot interaction: an experimental study,” in2017 26th IEEE international symposium on Robot and Human Interactive Communication (RO-MAN). IEEE, 2017, pp. 1108–1114
2017
-
[3]
On the utility of learning about humans for human- ai coordination,
M. Carroll, R. Shah, M. K. Ho, T. Griffiths, S. Seshia, P. Abbeel, and A. Dragan, “On the utility of learning about humans for human- ai coordination,”Advances in neural information processing systems, vol. 32, 2019
2019
-
[4]
Cooperative task and motion planning for multi-arm assembly systems,
J. Chen, J. Li, Y . Huang, C. Garrett, D. Sun, C. Fan, A. Hofmann, C. Mueller, S. Koenig, and B. C. Williams, “Cooperative task and motion planning for multi-arm assembly systems,”arXiv preprint arXiv:2203.02475, 2022
-
[5]
Fair contextual multi-armed bandits: Theory and experiments,
Y . Chen, A. Cuellar, H. Luo, J. Modi, H. Nemlekar, and S. Nikolaidis, “Fair contextual multi-armed bandits: Theory and experiments,” in Conference on Uncertainty in Artificial Intelligence. PMLR, 2020, pp. 181–190
2020
-
[6]
Multi-armed bandits with fairness constraints for distributing resources to human teammates,
H. Claure, Y . Chen, J. Modi, M. Jung, and S. Nikolaidis, “Multi-armed bandits with fairness constraints for distributing resources to human teammates,” inProceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, 2020, pp. 299–308
2020
-
[7]
An alignment-based approach to learning motions from demonstrations,
A. Cuellar, C. K. Fourie, and J. A. Shah, “An alignment-based approach to learning motions from demonstrations,”IEEE Robotics and Automation Letters, 2025
2025
-
[8]
A layered control approach to human-aware task and motion planning for human-robot collaboration,
M. Faroni, M. Beschi, S. Ghidini, N. Pedrocchi, A. Umbrico, A. Or- landini, and A. Cesta, “A layered control approach to human-aware task and motion planning for human-robot collaboration,” in2020 29th IEEE international conference on robot and human interactive communication (RO-MAN). IEEE, 2020, pp. 1204–1210
2020
-
[9]
Optimal task and motion planning and execution for multiagent systems in dynamic environments,
M. Faroni, A. Umbrico, M. Beschi, A. Orlandini, A. Cesta, and N. Pedrocchi, “Optimal task and motion planning and execution for multiagent systems in dynamic environments,”IEEE Transactions on Cybernetics, vol. 54, no. 6, pp. 3366–3377, 2023
2023
-
[10]
Probabilistically safe robot planning with confidence-based human predictions,
J. F. Fisac, A. Bajcsy, S. L. Herbert, D. Fridovich-Keil, S. Wang, C. J. Tomlin, and A. D. Dragan, “Probabilistically safe robot planning with confidence-based human predictions,”arXiv preprint arXiv:1806.00109, 2018
-
[11]
Real-time anticipation and entrainment in human-robot interaction,
C. Fourie, “Real-time anticipation and entrainment in human-robot interaction,” Ph.D. dissertation, Massachusetts Institute of Technology, 2024
2024
-
[12]
On-manifold strategies for reactive dynamical system modulation with non-convex obstacles,
C. K. Fourie, N. Figueroa, and J. A. Shah, “On-manifold strategies for reactive dynamical system modulation with non-convex obstacles,” IEEE Transactions on Robotics, 2024
2024
-
[13]
Computational design of mixed-initiative human–robot teaming that considers human factors: situational awareness, workload, and workflow preferences,
M. Gombolay, A. Bair, C. Huang, and J. Shah, “Computational design of mixed-initiative human–robot teaming that considers human factors: situational awareness, workload, and workflow preferences,” The International journal of robotics research, vol. 36, no. 5-7, pp. 597–617, 2017
2017
-
[14]
Had-tamp: Human adaptive task and motion planning for human-robot collabo- ration in industrial scenario,
A. Gottardi, M. Terreran, E. Pagello, and E. Menegatti, “Had-tamp: Human adaptive task and motion planning for human-robot collabo- ration in industrial scenario,”Robotics and Autonomous Systems, p. 105318, 2025
2025
-
[15]
Preference-based assistance prediction for human-robot collaboration tasks,
E. C. Grigore, A. Roncone, O. Mangin, and B. Scassellati, “Preference-based assistance prediction for human-robot collaboration tasks,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2018, pp. 4441–4448
2018
-
[16]
Recent trends in task and motion planning for robotics: A survey,
H. Guo, F. Wu, Y . Qin, R. Li, K. Li, and K. Li, “Recent trends in task and motion planning for robotics: A survey,”ACM Computing Surveys, vol. 55, no. 13s, pp. 1–36, 2023
2023
-
[17]
Analyzing the effects of human-aware motion planning on close-proximity human–robot collaboration,
P. A. Lasota and J. A. Shah, “Analyzing the effects of human-aware motion planning on close-proximity human–robot collaboration,”Hu- man factors, vol. 57, no. 1, pp. 21–33, 2015
2015
-
[18]
X. Li, Y . Zhao, C. Wang, G. Scalia, G. Eraslan, S. Nair, T. Biancalani, S. Ji, A. Regev, S. Levine,et al., “Derivative-free guidance in contin- uous and discrete diffusion models with soft value-based decoding,” arXiv preprint arXiv:2408.08252, 2024
-
[19]
Coordinating human- robot teams with dynamic and stochastic task proficiencies,
R. Liu, M. Natarajan, and M. C. Gombolay, “Coordinating human- robot teams with dynamic and stochastic task proficiencies,”ACM Transactions on Human-Robot Interaction (THRI), vol. 11, no. 1, pp. 1–42, 2021
2021
-
[20]
Human-robot teaming: grand challenges,
M. Natarajan, E. Seraj, B. Altundas, R. Paleja, S. Ye, L. Chen, R. Jensen, K. C. Chang, and M. Gombolay, “Human-robot teaming: grand challenges,”Current Robotics Reports, vol. 4, pp. 81–100, 2023
2023
-
[21]
Motion planning and scheduling for human and industrial-robot collaboration,
S. Pellegrinelli, A. Orlandini, N. Pedrocchi, A. Umbrico, and T. Tolio, “Motion planning and scheduling for human and industrial-robot collaboration,”CIRP Annals, vol. 66, no. 1, pp. 1–4, 2017
2017
-
[22]
A human-centered dynamic task scheduling and safe task execution approach for human- robot collaboration scenarios
A. Pupa, M. Arrfou, G. Andreoni, and C. Secchi, “A human-centered dynamic task scheduling and safe task execution approach for human- robot collaboration scenarios.” IET, 2023
2023
-
[23]
A resilient and effective task scheduling approach for industrial human-robot collaboration,
A. Pupa, W. Van Dijk, C. Brekelmans, and C. Secchi, “A resilient and effective task scheduling approach for industrial human-robot collaboration,”Sensors, vol. 22, no. 13, p. 4901, 2022
2022
-
[24]
Towards practical finite sample bounds for motion planning in tamp,
S. Shaw, A. Curtis, L. P. Kaelbling, T. Lozano-P ´erez, and N. Roy, “Towards practical finite sample bounds for motion planning in tamp,” arXiv preprint arXiv:2407.17394, 2024
-
[25]
J. A. Stankovic, M. Spuri, K. Ramamritham, and G. Buttazzo,Dead- line scheduling for real-time systems: EDF and related algorithms. Springer Science & Business Media, 1998, vol. 460
1998
-
[26]
Semi-supervised learning of decision-making models for human-robot collaboration,
V . V . Unhelkar, S. Li, and J. A. Shah, “Semi-supervised learning of decision-making models for human-robot collaboration,” inconference on Robot Learning. PMLR, 2020, pp. 192–203
2020
-
[27]
Optimal interactive learning on the job via facility location planning,
S. Vats, M. Zhao, P. Callaghan, M. Jia, M. Likhachev, O. Kroemer, and G. Konidaris, “Optimal interactive learning on the job via facility location planning,”arXiv preprint arXiv:2505.00490, 2025
-
[28]
Real-time adaptive assembly scheduling in human-multi-robot collaboration according to human capability,
S. Zhang, Y . Chen, J. Zhang, and Y . Jia, “Real-time adaptive assembly scheduling in human-multi-robot collaboration according to human capability,” in2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 3860–3866
2020
-
[29]
Relevance-driven deci- sion making for safer and more efficient human robot collaboration,
X. Zhang, D. Huang, and K. Youcef-Toumi, “Relevance-driven deci- sion making for safer and more efficient human robot collaboration,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 5899–5905
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.