Recognition: unknown
QDTraj: Exploration of Diverse Trajectory Primitives for Articulated Objects Robotic Manipulation
Pith reviewed 2026-05-08 11:19 UTC · model grok-4.3
The pith
QDTraj uses quality-diversity search to generate at least five times more varied robot trajectories for activating object joints and sliders than prior methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
QDTraj is a method based on Quality-Diversity algorithms that leverages sparse reward exploration in order to generate a set of diverse and high-performing trajectory primitives for a given manipulation task. It was validated by generating trajectories in simulation for hinge and slider activation tasks across 30 articulations from the PartNetMobility dataset, achieving an average of 704 different trajectories per task, which is at least five times more than compared methods, and deploying them in the real world.
What carries the argument
Quality-Diversity algorithms that use sparse reward signals to search for both high task performance and behavioral variety among candidate robot trajectories.
Load-bearing premise
Trajectories found to be diverse and high-performing in simulation remain effective and selectable under live real-world constraints and unexpected changes without additional adaptation or fine-tuning.
What would settle it
A real-world deployment trial in which none of the QDTraj-generated trajectories can be executed successfully under changing conditions while a non-diverse baseline method still completes the task.
Figures





read the original abstract
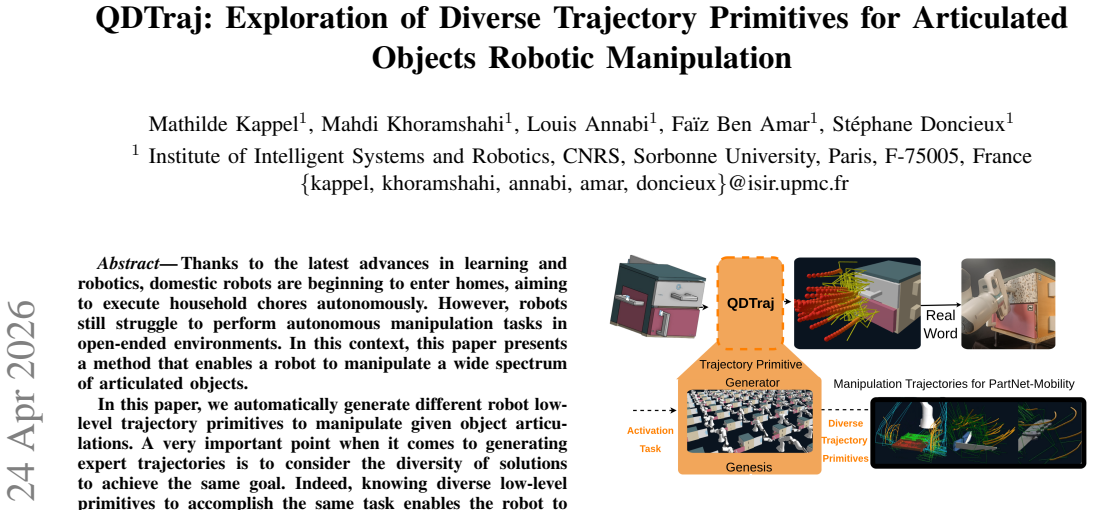
Thanks to the latest advances in learning and robotics, domestic robots are beginning to enter homes, aiming to execute household chores autonomously. However, robots still struggle to perform autonomous manipulation tasks in open-ended environments. In this context, this paper presents a method that enables a robot to manipulate a wide spectrum of articulated objects. In this paper, we automatically generate different robot low-level trajectory primitives to manipulate given object articulations. A very important point when it comes to generating expert trajectories is to consider the diversity of solutions to achieve the same goal. Indeed, knowing diverse low-level primitives to accomplish the same task enables the robot to choose the optimal solution in its real-world environment, with live constraints and unexpected changes. To do so, we propose a method based on Quality-Diversity algorithms that leverages sparse reward exploration in order to generate a set of diverse and high-performing trajectory primitives for a given manipulation task. We validated our method, QDTraj, by generating diverse trajectories in simulation and deploying them in the real world. QDTraj generates at least 5 times more diverse trajectories for both hinge and slider activation tasks, outperforming the other methods we compared against. We assessed the generalization of our method over 30 articulations of the PartNetMobility articulated object dataset, with an average of 704 different trajectories by task. Code is publicly available at: https://kappel.web.isir.upmc.fr/trajectory_primitive_website
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces QDTraj, a Quality-Diversity (QD) algorithm using sparse rewards to automatically generate diverse, high-performing low-level trajectory primitives for robotic manipulation of articulated objects (hinges and sliders). It claims to produce at least 5× more diverse trajectories than compared methods, with an average of 704 trajectories per task across 30 articulations from the PartNetMobility dataset, validated via simulation and real-world deployment, and releases code publicly.
Significance. If the results hold with proper quantification, the approach could meaningfully improve robustness in open-ended robotic manipulation by supplying an archive of solutions rather than single trajectories, directly addressing adaptation to live constraints. The generalization test over 30 objects and public code are notable strengths for reproducibility.
major comments (3)
- [Abstract] Abstract: the claim that trajectories were 'deployed in the real world' and that diversity enables selection of optimal solutions 'with live constraints and unexpected changes' is not supported by any reported quantitative metrics (success rates, perturbation recovery, or selection frequency from the archive versus a single trajectory). This evidence gap directly undermines the central motivation.
- [Results] Results/Experiments section: the headline quantitative claims (≥5× more diverse trajectories; average 704 trajectories per task) lack specification of the diversity metric (behavioral descriptor, archive coverage, or post-hoc filtering), baseline implementations, and any statistical tests; without these, the comparison cannot be assessed for soundness.
- [Methods] Methods: it is unclear how the QD algorithm parameters (e.g., archive size, behavioral descriptor for trajectories) were chosen or held constant across the 30 different articulations, raising questions about whether the reported generalization is parameter-free or tuned per object.
minor comments (2)
- [Abstract] Abstract contains informal phrasing ('a very important point when it comes to generating expert trajectories') that should be revised for a journal audience.
- The paper would benefit from an explicit table or figure showing example diverse trajectories and their behavioral descriptors to illustrate the claimed diversity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which helps clarify the presentation of our results. We address each major comment below and will make the indicated revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that trajectories were 'deployed in the real world' and that diversity enables selection of optimal solutions 'with live constraints and unexpected changes' is not supported by any reported quantitative metrics (success rates, perturbation recovery, or selection frequency from the archive versus a single trajectory). This evidence gap directly undermines the central motivation.
Authors: We acknowledge that the abstract overstates the real-world evidence. The real-world experiments were limited to qualitative demonstrations of a subset of trajectories on a physical robot to confirm sim-to-real transfer, without quantitative metrics on success rates or adaptation to perturbations. The motivation for diversity is quantitatively supported by the simulation results showing large archives. We will revise the abstract to precisely describe the real-world validation as qualitative and moderate the claims regarding live constraints, while adding a brief discussion of how the archive could support adaptation. revision: yes
-
Referee: [Results] Results/Experiments section: the headline quantitative claims (≥5× more diverse trajectories; average 704 trajectories per task) lack specification of the diversity metric (behavioral descriptor, archive coverage, or post-hoc filtering), baseline implementations, and any statistical tests; without these, the comparison cannot be assessed for soundness.
Authors: We agree that these details are essential. Diversity is quantified as the number of solutions in the QD archive exceeding a sparse reward threshold, with the behavioral descriptor defined as a fixed 10-dimensional vector of normalized trajectory features (joint displacements and velocities). Baselines were reimplemented using their original code and default hyperparameters. We will expand the Results section to explicitly define the metric, describe baseline setups, report the exact archive coverage, and include statistical tests (paired t-tests across the 30 objects) to support the 5× claim. revision: yes
-
Referee: [Methods] Methods: it is unclear how the QD algorithm parameters (e.g., archive size, behavioral descriptor for trajectories) were chosen or held constant across the 30 different articulations, raising questions about whether the reported generalization is parameter-free or tuned per object.
Authors: The parameters were determined via preliminary grid search on a fixed subset of five objects and then held constant for all 30 articulations to test generalization. Archive size was fixed at 1024, and the behavioral descriptor (10D trajectory feature vector) was identical across tasks. No per-object tuning was applied. We will add a dedicated paragraph in the Methods section detailing this selection process and the fixed hyperparameter values. revision: yes
Circularity Check
No circularity; empirical method validated against external benchmarks
full rationale
The paper introduces QDTraj as a Quality-Diversity algorithm that uses sparse rewards to generate diverse high-performing trajectories for articulated-object manipulation tasks. Its headline results (≥5× more diverse trajectories than baselines, average 704 trajectories per task across 30 PartNetMobility articulations) are obtained by direct empirical measurement in simulation and limited real-world deployment; no equations, fitted parameters, or self-referential definitions are presented that would make any reported quantity tautological with its inputs. Any prior citations (e.g., to QD literature) supply algorithmic primitives rather than load-bearing uniqueness theorems or ansatzes that collapse the present claim. The derivation chain therefore remains self-contained and falsifiable against independent datasets and methods.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[2]
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
O. X.-E. Collaboration et al., “Open X-Embodiment: Robotic Learning Datasets and RT-X Models,” May 14, 2025, arXiv: arXiv:2310.08864. doi: 10.48550/arXiv.2310.08864
work page internal anchor Pith review doi:10.48550/arxiv.2310.08864 2025
-
[3]
Precise and dexterous robotic ma- nipulation via human-in-the-loop reinforcement learning,
J. Luo, C. Xu, J. Wu, and S. Levine, “Precise and Dexterous Robotic Manipulation via Human-in-the-Loop Reinforcement Learning,” Mar. 20, 2025, arXiv: arXiv:2410.21845. doi: 10.48550/arXiv.2410.21845
-
[4]
Efficient Data Collec- tion for Robotic Manipulation via Compositional Generalization,
J. Gao, A. Xie, T. Xiao, C. Finn, and D. Sadigh, “Efficient Data Collec- tion for Robotic Manipulation via Compositional Generalization,” May 21, 2024, arXiv: arXiv:2403.05110. doi: 10.48550/arXiv.2403.05110
-
[5]
A review of robot learning for manipulation: Challenges, representations, and algorithms
O. Kroemer, S. Niekum, and G. Konidaris, “A Review of Robot Learning for Manipulation: Challenges, Representations, and Algorithms,” Nov. 06, 2020, arXiv: arXiv:1907.03146. doi: 10.48550/arXiv.1907.03146
-
[6]
What is Intrinsic Motivation? A Typol- ogy of Computational Approaches
Oudeyer PY , Kaplan F. What is Intrinsic Motivation? A Typol- ogy of Computational Approaches. Front Neurorobot. 2007 Nov 2;1:6. doi: 10.3389/neuro.12.006.2007. PMID: 18958277; PMCID: PMC2533589
-
[7]
C. Lynch et al., “Learning Latent Plans from Play,” Dec. 20, 2019, arXiv: arXiv:1903.01973. doi: 10.48550/arXiv.1903.01973
-
[8]
Quality and Diversity Optimization: A Uni- fying Modular Framework,
A. Cully and Y . Demiris, “Quality and Diversity Optimization: A Uni- fying Modular Framework,” May 12, 2017, arXiv: arXiv:1708.09251. doi: 10.48550/arXiv.1708.09251
-
[9]
Survey on Modeling of Human-made Articulated Objects.arXiv preprint arXiv:2403.14937, 2025
J. Liu, M. Savva, and A. Mahdavi-Amiri, “Survey on Model- ing of Human-made Articulated Objects,” Mar. 19, 2025, arXiv: arXiv:2403.14937. doi: 10.48550/arXiv.2403.14937
-
[10]
SAPIEN: A SimulAted Part-based Interac- tive ENvironment,
F. Xiang et al., “SAPIEN: A SimulAted Part-based Interac- tive ENvironment,” Mar. 19, 2020, arXiv: arXiv:2003.08515. doi: 10.48550/arXiv.2003.08515
-
[11]
Available: http://arxiv.org/abs/1812.02713
K. Mo et al., “PartNet: A Large-scale Benchmark for Fine-grained and Hierarchical Part-level 3D Object Understanding,” Dec. 06, 2018, arXiv: arXiv:1812.02713. doi: 10.48550/arXiv.1812.02713
-
[12]
AO-Grasp: Articulated Object Grasp Generation,
C. P. Morlans et al., “AO-Grasp: Articulated Object Grasp Generation,” Mar. 25, 2025, arXiv: arXiv:2310.15928. doi: 10.48550/arXiv.2310.15928
-
[13]
H. Geng et al., “GAPartNet: Cross-Category Domain-Generalizable Object Perception and Manipulation via Generalizable and Ac- tionable Parts,” Mar. 26, 2023, arXiv: arXiv:2211.05272. doi: 10.48550/arXiv.2211.05272
-
[14]
H. Geng, Z. Li, Y . Geng, J. Chen, H. Dong, and H. Wang, “PartManip: Learning Cross-Category Generalizable Part Manipulation Policy from Point Cloud Observations,” Mar. 29, 2023, arXiv: arXiv:2303.16958. doi: 10.48550/arXiv.2303.16958. 2023
-
[15]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal Policy Optimization Algorithms,” Aug. 28, 2017, arXiv: arXiv:1707.06347. doi: 10.48550/arXiv.1707.06347
work page internal anchor Pith review doi:10.48550/arxiv.1707.06347 2017
-
[16]
X. Zhang et al., “Adaptive Articulated Object Manipulation On The Fly with Foundation Model Reasoning and Part Grounding,” Jul. 24, 2025, arXiv: arXiv:2507.18276. doi: 10.48550/arXiv.2507.18276
-
[17]
Where2Act: From Pixels to Actions for Articulated 3D Objects,
K. Mo, L. Guibas, M. Mukadam, A. Gupta, and S. Tul- siani, “Where2Act: From Pixels to Actions for Articulated 3D Objects,” Aug. 10, 2021, arXiv: arXiv:2101.02692. doi: 10.48550/arXiv.2101.02692
-
[18]
Where2Explore: Few-shot Affordance Learning for Unseen Novel Categories of Ar- ticulated Objects,
C. Ning, R. Wu, H. Lu, K. Mo, and H. Dong, “Where2Explore: Few-shot Affordance Learning for Unseen Novel Categories of Ar- ticulated Objects,” Dec. 15, 2023, arXiv: arXiv:2309.07473. doi: 10.48550/arXiv.2309.07473
-
[19]
Vat-mart: Learning visual action trajectory proposals for manipulating 3d articulated objects,
R. Wu et al., “V AT-Mart: Learning Visual Action Trajectory Proposals for Manipulating 3D ARTiculated Objects,” Apr. 01, 2022, arXiv: arXiv:2106.14440. doi: 10.48550/arXiv.2106.14440
-
[20]
Zeng, C., et al. (2021). Learning compliant grasping and manipu- lation by teleoperation with adaptive force control. *arXiv preprint arXiv:2107.08996*. doi: 10.48550/arXiv.2107.08996
-
[21]
(2025).AdaManip: Learning Adaptive Manipulation Policies for Articulated Objects via Diffusion Models, arXiv preprint
Wang, Y ., Huang, S., Wu, J., and Wang, H. (2025).AdaManip: Learning Adaptive Manipulation Policies for Articulated Objects via Diffusion Models, arXiv preprint
2025
-
[22]
Is Diversity All You Need for Scalable Robotic Manipulation?,
M. Shi et al., “Is Diversity All You Need for Scalable Robotic Manipulation?,” Jul. 08, 2025, arXiv: arXiv:2507.06219. doi: 10.48550/arXiv.2507.06219
-
[23]
Intrinsically motivated goal ex- ploration for active motor learning in robots: A case study,
A. Baranes and P.-Y . Oudeyer, “Intrinsically motivated goal ex- ploration for active motor learning in robots: A case study,” in 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei: IEEE, Oct. 2010, pp. 1766–1773. doi: 10.1109/IROS.2010.5651385
-
[24]
A. Havrilla et al., “Surveying the Effects of Quality, Diversity, and Complexity in Synthetic Data From Large Language Models,” Dec. 09, 2024, arXiv: arXiv:2412.02980. doi: 10.48550/arXiv.2412.02980
-
[25]
Data scaling laws in im- itation learning for robotic manipulation
Y . Hu, F. Lin, P. Sheng, C. Wen, J. You, and Y . Gao, “Data Scaling Laws in Imitation Learning for Robotic Manipulation,” Oct. 13, 2025, arXiv: arXiv:2410.18647. doi: 10.48550/arXiv.2410.18647
-
[26]
Illuminating search spaces by mapping elites
J.-B. Mouret and J. Clune, “Illuminating search spaces by mapping elites,” Apr. 20, 2015, arXiv: arXiv:1504.04909. doi: 10.48550/arXiv.1504.04909
-
[27]
Speeding up 6-DoF Grasp Sampling with Quality-Diversity,
J. Huber et al., “Speeding up 6-DoF Grasp Sampling with Quality-Diversity,” Mar. 10, 2024, arXiv: arXiv:2403.06173. doi: 10.48550/arXiv.2403.06173
-
[28]
QDGset: A Large Scale Grasping Dataset Generated with Quality-Diversity,
J. Huber et al., “QDGset: A Large Scale Grasping Dataset Generated with Quality-Diversity,” Oct. 03, 2024, arXiv: arXiv:2410.02319. doi: 10.48550/arXiv.2410.02319
-
[29]
DexEvolve: Evolutionary Optimization for Robust and Diverse Dexterous Grasp Synthesis,
R. Zurbr ¨ugg, A. Cramariuc, and M. Hutter, “DexEvolve: Evolutionary Optimization for Robust and Diverse Dexterous Grasp Synthesis,” Feb. 16, 2026, arXiv: arXiv:2602.15201. doi: 10.48550/arXiv.2602.15201
-
[30]
Po- keNet: Learning Kinematic Models of Articulated Objects from Hu- man Observations,
A. Gupta, W. Gu, O. Patil, J. K. Lee, and N. Gopalan, “Po- keNet: Learning Kinematic Models of Articulated Objects from Hu- man Observations,” Feb. 02, 2026, arXiv: arXiv:2602.02741. doi: 10.48550/arXiv.2602.02741
-
[31]
Classifying human manipu- lation behavior,
I. M. Bullock and A. M. Dollar, “Classifying human manipu- lation behavior,” in 2011 IEEE International Conference on Re- habilitation Robotics, Zurich: IEEE, Jun. 2011, pp. 1–6. doi: 10.1109/ICORR.2011.5975408
-
[32]
*IEEE Robotics and Automation Letters*, 7(2), 2447–2454
UMPNet: Universal manipulation policy network for articulated ob- jects. *IEEE Robotics and Automation Letters*, 7(2), 2447–2454. doi: 10.1109/LRA.2022.314239
-
[33]
Adaptive Compliance Policy: Learning Ap- proximate Compliance for Diffusion Guided Control, 2024
Y . Hou et al., “Adaptive Compliance Policy: Learning Approximate Compliance for Diffusion Guided Control,” Mar. 07, 2025, arXiv: arXiv:2410.09309. doi: 10.48550/arXiv.2410.09309
-
[34]
A Bimanual Manipulation Taxonomy,
F. Krebs and T. Asfour, “A Bimanual Manipulation Taxonomy,” IEEE Robot. Autom. Lett., vol. 7, no. 4, pp. 11031–11038, Oct. 2022, doi: 10.1109/LRA.2022.3196158
-
[35]
Rhoban/onshape-to-robot (2026), Onshape-to-robot: Converting On- shape CAD assemblies to URDF/SDF/MuJoCo via the Onshape API, GitHub repository
2026
-
[36]
December 2024
Genesis Authors.Genesis: A Generative and Universal Physics Engine for Robotics and Beyond. December 2024. Available at:https: //github.com/Genesis-Embodied-AI/Genesis. 8
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.