On Fin Based Propulsion and Maneuvering for Uncrewed Underwater Vehicles
Pith reviewed 2026-05-08 10:05 UTC · model grok-4.3
The pith
Tuning phase offsets and spacing in multi-fin setups enhances thrust by allowing energy extraction from wakes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that downstream fins in multi-fin configurations can extract energy from the vortex wakes of upstream fins through tuned phase offsets and spacing, leading to significantly enhanced thrust, as shown in two-dimensional simulations of NACA 0020 hydrofoils with prescribed heave and pitch motions, while poor timing reduces performance.
What carries the argument
The phase offset parameter that describes interactions in multi-fin systems, combined with the Boundary Data Immersion Method solver for incompressible flow, enables modeling of vortex interactions and energy recovery.
If this is right
- Baseline single fin simulations establish force generation characteristics using Strouhal number.
- Reduced order model with torsional spring emulates fin flexibility and generates net lateral forces for maneuvering via asymmetric actuation.
- Bayesian optimization efficiently identifies high-performance multi-fin configurations in the large parameter space.
- Multi-fin thrust can be enhanced or reduced depending on phase and spacing tuning.
Where Pith is reading between the lines
- Real vehicles might achieve better maneuverability by dynamically adjusting fin phases based on similar optimization.
- This framework could extend to three-dimensional simulations to check if the energy extraction holds in more realistic flows.
- Designers of underwater robots could use these insights to replace or supplement propeller systems with fin arrays.
Load-bearing premise
The two-dimensional incompressible simulations with prescribed rigid-body motions and a simple torsional spring accurately represent the complex three-dimensional, flexible, and unsteady hydrodynamics of real fins.
What would settle it
Three-dimensional experiments or higher-fidelity simulations of flexible multi-fin systems showing no net thrust increase from phase tuning compared to single fin or uncoordinated cases.
Figures































read the original abstract
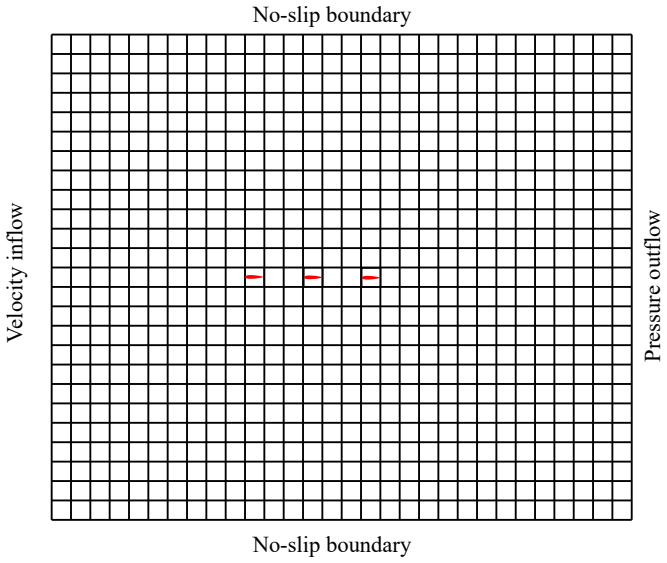
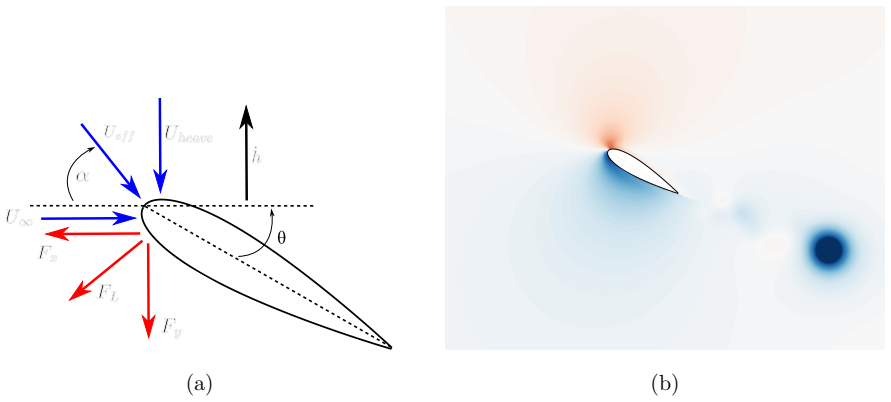
Bio-inspired propulsion using oscillating fins has gained attention for its potential to achieve high thrust, efficiency, and maneuverability. Many aquatic organisms generate propulsion through coordinated fin oscillations, and understanding these hydrodynamic mechanisms can inform the design of advanced underwater vehicles. A numerical framework is developed to simulate a NACA 0020 hydrofoil undergoing prescribed heave and pitch about the leading edge in a uniform freestream. Simulations are performed using WaterLily, a two-dimensional incompressible flow solver based on the Boundary Data Immersion Method (BDIM). Key kinematic parameters, frequency, heave amplitude, pitch amplitude, and phase offset, are characterized through nondimensional groups, primarily the Strouhal number. Reynolds number is held constant to isolate kinematic effects, while an additional parameter is introduced to describe phase driven interactions in multi fin systems. The study begins with a single fin to establish baseline force generation. A reduced order model incorporating a leading-edge torsional spring is then developed to emulate flexibility. The effects of asymmetric actuation, through heave speed, pitch bias, and stiffness variation, are also examined, demonstrating the generation of net lateral forces for maneuvering. Next multi-fin configurations investigated. Downstream fins interact with vortices shed by upstream fins, enabling energy extraction from the wake. Results show that tuning phase offsets and spacing can significantly enhance thrust, while poor timing reduces performance. To efficiently explore the growing parameter space, Bayesian optimization is applied to identify high performance configurations. This work provides insight into the hydrodynamic mechanisms of oscillating fin propulsion and establishes a framework for designing efficient, bio-inspired underwater propulsion systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a 2D numerical study of bio-inspired oscillating fin propulsion for underwater vehicles using the Boundary Data Immersion Method (BDIM) implemented in WaterLily. It characterizes single NACA 0020 hydrofoils with prescribed heave and pitch motions, introduces a torsional spring model for leading-edge flexibility, explores asymmetric actuation for maneuvering, and investigates multi-fin configurations where phase offsets and spacing are optimized via Bayesian methods to enhance thrust through wake vortex interactions.
Significance. This research could inform the design of efficient and maneuverable uncrewed underwater vehicles by providing a framework for optimizing fin kinematics. The application of Bayesian optimization to explore the parameter space for multi-fin systems is a strength for efficiently identifying promising configurations. However, the significance is tempered by the preliminary nature of the 2D simulations without supporting validation or three-dimensional analysis.
major comments (3)
- [Results on multi-fin configurations] The statement that 'tuning phase offsets and spacing can significantly enhance thrust' lacks any reported quantitative values, such as thrust coefficients, percentage improvements, or comparisons to single-fin baselines, which are necessary to substantiate the central claim.
- [Numerical methods and validation] There is no mention of mesh convergence studies, grid independence tests, or validation against established benchmarks for oscillating hydrofoils (e.g., comparison of mean thrust or efficiency at given Strouhal numbers), undermining confidence in the simulation outputs that support all performance claims.
- [Multi-fin wake interaction analysis] The attribution of performance gains to energy extraction from upstream vortices in 2D simulations does not consider or test the impact of three-dimensional effects, such as tip vortices and spanwise flow, which could disrupt the wake structures and reduce or eliminate the reported benefits in actual three-dimensional fins.
minor comments (2)
- [Abstract] The abstract refers to 'an additional parameter' for phase-driven interactions in multi-fin systems without defining or naming it, which should be clarified for reader understanding.
- [Kinematic parameters] Consider providing a table listing all nondimensional groups (Strouhal number, etc.) and their explored ranges to improve clarity.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed review of our manuscript. We appreciate the recognition of the potential applications to UUV design and the use of Bayesian optimization. We agree that the manuscript can be strengthened by providing explicit quantitative results, adding numerical validation details, and expanding the discussion of 2D limitations. We address each major comment below and will incorporate the necessary revisions.
read point-by-point responses
-
Referee: The statement that 'tuning phase offsets and spacing can significantly enhance thrust' lacks any reported quantitative values, such as thrust coefficients, percentage improvements, or comparisons to single-fin baselines, which are necessary to substantiate the central claim.
Authors: We agree that quantitative metrics are needed to substantiate the claim. The revised manuscript will include explicit reporting of thrust coefficients for the optimized multi-fin cases, percentage improvements relative to single-fin baselines, and direct comparisons, drawn from the simulation data already obtained. revision: yes
-
Referee: There is no mention of mesh convergence studies, grid independence tests, or validation against established benchmarks for oscillating hydrofoils (e.g., comparison of mean thrust or efficiency at given Strouhal numbers), undermining confidence in the simulation outputs that support all performance claims.
Authors: This omission is a valid concern. We will add a dedicated section on numerical methods that reports mesh convergence studies and grid independence tests. We will also include validation comparisons to established oscillating hydrofoil benchmarks from the literature, focusing on mean thrust and efficiency at relevant Strouhal numbers. revision: yes
-
Referee: The attribution of performance gains to energy extraction from upstream vortices in 2D simulations does not consider or test the impact of three-dimensional effects, such as tip vortices and spanwise flow, which could disrupt the wake structures and reduce or eliminate the reported benefits in actual three-dimensional fins.
Authors: We recognize that 2D simulations cannot capture three-dimensional effects such as tip vortices and spanwise flow. In the revised manuscript we will expand the discussion to explicitly acknowledge these limitations and their potential to alter wake interactions in 3D fins, while emphasizing that the 2D results isolate key mechanisms and identify configurations warranting future three-dimensional study. revision: partial
Circularity Check
No circularity: results are direct outputs of independent 2D flow simulations
full rationale
The paper reports thrust and maneuvering outcomes obtained by solving the incompressible Navier-Stokes equations via BDIM on prescribed rigid-body kinematics (heave/pitch) plus a leading-edge torsional spring. Strouhal number and phase/spacing parameters are standard nondimensional inputs chosen independently of the target force coefficients. Bayesian optimization is applied only as an efficient search algorithm over the simulation parameter space; it does not fit a model whose predictions are then fed back as the reported gains. No equations, fitted parameters, or self-citations are shown that reduce the claimed performance enhancements to quantities defined by the same data or by prior work of the same author. The derivation chain is therefore self-contained against external numerical benchmarks.
Axiom & Free-Parameter Ledger
free parameters (2)
- Strouhal number
- phase offset parameter for multi-fin systems
axioms (1)
- domain assumption Two-dimensional incompressible flow governed by Navier-Stokes equations
Reference graph
Works this paper leans on
-
[1]
S. Alben. Optimal flexibility of a flapping appendage in an inviscid fluid.Journal of Fluid Mechanics, 614:355–380, 2008
work page 2008
-
[2]
Concept design of a flexible-hull unmanned undersea vehicle
Jamie M Anderson, Michael S Triantafyllou, and Peter A Kerrebrock. Concept design of a flexible-hull unmanned undersea vehicle. InISOPE International Ocean and Polar Engineering Conference, pages ISOPE–I. ISOPE, 1997
work page 1997
-
[3]
R. Bale et al. Energy efficiency of swimming and flying animals.Proceedings of the National Academy of Sciences, 2014
work page 2014
-
[4]
P. Bandyopadhyay. Maneuvering hydrodynamics of fish and small underwater vehicles.Integrative and Comparative Biology, 2002
work page 2002
-
[5]
Promode R Bandyopadhyay. Maneuvering hydrodynamics of fish and small un- derwater vehicles.Integrative and comparative biology, 42(1):102–117, 2002
work page 2002
-
[6]
R. Clark and A. J. Smits. Thrust production and wake structure of a batoid- inspired oscillating fin.Journal of Fluid Mechanics, 822:408–430, 2017
work page 2017
-
[7]
Richard Courant, Kurt Friedrichs, and Hans Lewy. ¨Uber die partiellen differenzen- gleichungen der mathematischen physik.Mathematische annalen, 100(1):32–74, 1928
work page 1928
-
[8]
J. Czarnowski, R. Cleary, and B. Kreamer. Exploring the possibility of placing traditional marine vessels under oscillating foil propulsion. InProceedings of the Seventh International Offshore and Polar Engineering Conference, International Offshore and Polar Engineering Conference, pages ISOPE–I–97–165, May 1997
work page 1997
-
[9]
P. Dewey et al. Scaling laws for the thrust production of flexible pitching panels. Journal of Fluid Mechanics, 732:29–46, 2013
work page 2013
-
[10]
F. Fish. Advantages of aquatic animals as models for bio-inspired drones.Bioin- spiration & Biomimetics, 2020
work page 2020
-
[11]
D. Floryan, C. W. Rowley, and A. J. Smits. Scaling the propulsive performance of heaving and pitching foils.Journal of Fluid Mechanics, 822:386–397, 2017
work page 2017
-
[12]
D. Floryan, T. Van Buren, and A. J. Smits. Efficient cruising for swimming and flying animals is dictated by fluid drag.Physical Review Fluids, 4:093102, 2019. 98
work page 2019
-
[13]
Daniel Floryan, Tyler Van Buren, and Alexander J Smits. Efficient cruising for swimming and flying animals is dictated by fluid drag.Proceedings of the National Academy of Sciences, 115(32):8116–8118, 2018
work page 2018
-
[14]
M. Gazzola, M. Argentina, and L. Mahadevan. Scaling macroscopic aquatic loco- motion.Nature Physics, 10:758–761, 2014
work page 2014
-
[15]
Jiacheng Guo, Pan Han, Wei Zhang, Junshi Wang, George V Lauder, Valentina Di Santo, and Haibo Dong. Vortex dynamics and fin-fin interactions result- ing in performance enhancement in fish-like propulsion.Physical Review Fluids, 8(7):073101, 2023
work page 2023
-
[16]
S. Heathcote and I. Gursul. Flexible flapping airfoil propulsion.AIAA Journal, 2007
work page 2007
-
[17]
J. Katz and D. Weihs. Hydrodynamic propulsion by large amplitude oscillation of an airfoil with chordwise flexibility.Journal of Fluid Mechanics, 88:485–497, 1978
work page 1978
-
[18]
Nonsinusoidal path optimization of a flapping airfoil.AIAA journal, 45(8):2075–2082, 2007
Mustafa Kaya and Ismail H Tuncer. Nonsinusoidal path optimization of a flapping airfoil.AIAA journal, 45(8):2075–2082, 2007
work page 2075
-
[19]
M. M. Koochesfahani. Vortical patterns in the wake of an oscillating foil.AIAA Journal, 27(9):1200–1205, 1989
work page 1989
-
[20]
M. J. Lighthill. Aquatic animal propulsion of high hydromechanical efficiency. Journal of Fluid Mechanics, 44:265–301, 1970
work page 1970
-
[21]
Geng Liu, Yan Ren, Haibo Dong, Otar Akanyeti, James C Liao, and George V Lauder. Computational analysis of vortex dynamics and performance enhance- ment due to body–fin and fin–fin interactions in fish-like locomotion.Journal of fluid mechanics, 829:65–88, 2017
work page 2017
-
[22]
S. Michelin and S. Llewellyn Smith. Resonance and propulsion performance of a heaving flexible wing.Physics of Fluids, 2009
work page 2009
-
[23]
Immersed boundary methods.Annu
Rajat Mittal and Gianluca Iaccarino. Immersed boundary methods.Annu. Rev. Fluid Mech., 37(1):239–261, 2005
work page 2005
- [24]
-
[25]
L. Muscutt, G. Weymouth, and B. Ganapathisubramani. Performance augmen- tation mechanism of in-line tandem flapping foils.Journal of Fluid Mechanics, 827:484–505, 2017. 99
work page 2017
-
[26]
Energy harvesting through flow-induced oscillations of a foil.Physics of fluids, 21(12), 2009
Zhangli Peng and Qiang Zhu. Energy harvesting through flow-induced oscillations of a foil.Physics of fluids, 21(12), 2009
work page 2009
- [27]
-
[28]
D. B. Quinn, G. V. Lauder, and A. J. Smits. Scaling the propulsive performance of flexible heaving foils.Physical Review Fluids, 2:102101, 2017
work page 2017
-
[29]
D. A. Read, F. S. Hover, and M. S. Triantafyllou. Forces on oscillating foils for propulsion and maneuvering.Ocean Engineering, 30:17–26, 2003
work page 2003
-
[30]
M. Saadat et al. Hydrodynamic advantages of in-line schooling.Bioinspiration & Biomimetics, 2021
work page 2021
-
[31]
J. O. Scherer. Experimental and theoretical investigation of large amplitude oscil- lation foil propulsion systems. Technical Report AD0673776, Hydronautics Inc., 1968
work page 1968
-
[32]
Two- dimensional problems in hydrodynamics and aerodynamics, 1965
Leonid Ivanovich Sedov, CK Chu, H Cohen, B Seckler, and J Gillis. Two- dimensional problems in hydrodynamics and aerodynamics, 1965
work page 1965
- [33]
-
[34]
A. J. Smits. Undulatory and oscillatory swimming.Journal of Fluid Mechanics, 874:1–14, 2019
work page 2019
-
[35]
J. Tangorra et al. Development of a biologically inspired propulsor for underwater vehicles.IEEE Journal of Oceanic Engineering, 2007
work page 2007
-
[36]
G. K. Taylor, R. L. Nudds, and A. L. Thomas. Flying and swimming animals cruise at a strouhal number tuned for high power efficiency.Nature, 425:707–711, 2003
work page 2003
-
[37]
T. Theodorsen and I. E. Garrick. Mechanism of flutter: A theoretical and exper- imental investigation of the flutter problem. Technical report, NACA, 1935
work page 1935
-
[38]
M. S. Triantafyllou, G. S. Triantafyllou, and R. Gopalkrishnan. Wake mechanics for thrust generation in oscillating foils.Physics of Fluids, 5(12):2835–2837, 1993
work page 1993
-
[39]
M. S. Triantafyllou, G. S. Triantafyllou, and D. K. P. Yue. Hydrodynamics of fishlike swimming.Annual Review of Fluid Mechanics, 32:33–53, 2000
work page 2000
-
[40]
T. Van Buren, D. Floryan, N. J. Wei, and A. J. Smits. Flow speed has little impact on propulsive characteristics of oscillating foils.Physical Review Fluids, 3:013102, 2018. 100
work page 2018
-
[41]
Foil shapes for efficient fish-like propulsion
Tyler Van Buren, Daniel Floryan, Ayodeji T Bode-Oke, Pan Han, Haibo Dong, and Alexander Smits. Foil shapes for efficient fish-like propulsion. InAIAA Scitech 2019 Forum, page 1379, 2019
work page 2019
-
[42]
Tyler Van Buren, Daniel Floryan, and Alexander J Smits. Scaling and performance of simultaneously heaving and pitching foils.AIAA Journal, 57(9):3666–3677, 2019
work page 2019
-
[43]
Bioinspired underwater propulsors.Bioinspired structures and design, pages 113–139, 2020
Tyler Van Buren, Daniel Floryan, and Alexander J Smits. Bioinspired underwater propulsors.Bioinspired structures and design, pages 113–139, 2020
work page 2020
-
[44]
P. Webb. Maneuverability: general issues.IEEE Journal of Oceanic Engineering, 2004
work page 2004
-
[45]
P. Webb. Stability and maneuverability.Fish Physiology, 2005
work page 2005
-
[46]
Paul W Webb and Daniel Weihs. Stability versus maneuvering: challenges for sta- bility during swimming by fishes.Integrative and Comparative Biology, 55(4):753– 764, 2015
work page 2015
-
[47]
D. Weihs. Hydromechanics of fish schooling.Nature, 241:290–291, 1973
work page 1973
-
[48]
A hydrodynamical analysis of fish turning manoeuvres.Proceedings of the Royal Society of London
David Weihs. A hydrodynamical analysis of fish turning manoeuvres.Proceedings of the Royal Society of London. Series B. Biological Sciences, 182(1066):59–72, 1972
work page 1972
- [49]
-
[50]
Gabriel D. Weymouth and Bernat Font. Waterlily.jl: A differentiable and backend- agnostic julia solver to simulate incompressible viscous flow and dynamic bodies, 2024
work page 2024
-
[51]
David Yudin, Daniel Floryan, and Tyler Van Buren. Propulsive performance of oscillating plates with time-periodic flexibility.Journal of Fluid Mechanics, 959:A31, 2023
work page 2023
-
[52]
Gen- erating maneuvering forces with oscillating propulsors
David J Yudin, Ethan Watson, Daniel Floryan, and Tyler W Van Buren. Gen- erating maneuvering forces with oscillating propulsors. InAIAA SCITECH 2024 Forum, page 1557, 2024
work page 2024
-
[53]
J. Zhou, J. H. Seo, and R. Mittal. Effect of schooling on flow generated sounds from carangiform swimmers.Bioinspiration & Biomimetics, 19(3), 2024. 101 Appendix A REDUCED-ORDER MODEL FOR A LEADING-EDGE SPRING FIN This appendix presents the derivation of the reduced-order dynamical model used to describe the passive pitching motion of a fin with a leading...
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.