Recognition: unknown
Leveraging Previous-Traversal Point Cloud Map Priors for Camera-Based 3D Object Detection and Tracking
Pith reviewed 2026-05-07 16:41 UTC · model grok-4.3
The pith
DualViewMapDet retrieves prior point cloud maps online and fuses them with camera features in both perspective and bird's-eye views to improve 3D object localization without LiDAR.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
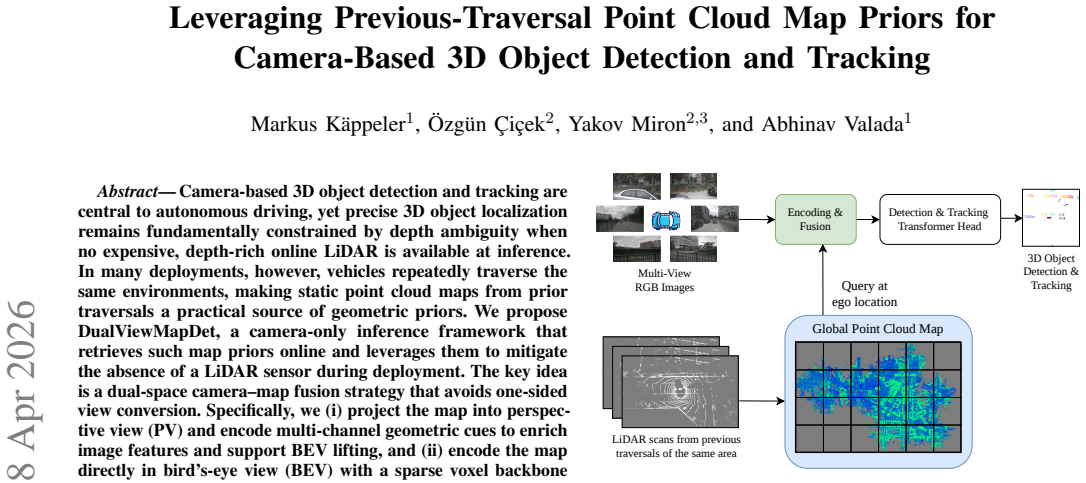
DualViewMapDet performs camera-only inference by retrieving prior-traversal point cloud maps and applying a dual-space fusion: the map is projected into perspective view to supply multi-channel geometric cues that enrich image features and aid BEV lifting, while the map is also encoded directly in BEV via a sparse voxel backbone and fused with the lifted camera features inside a shared metric space.
What carries the argument
dual-space camera-map fusion strategy that projects the prior map into perspective view to enrich image features and encodes the map directly in bird's-eye view for fusion with lifted camera features in a shared metric space
If this is right
- The dual-view fusion yields consistent gains over strong camera-only baselines on nuScenes and Argoverse 2, with the largest benefits in object localization.
- Ablation studies confirm that both the perspective-view projection and the bird's-eye-view map encoding contribute to the observed improvements.
- The framework supports online map retrieval, enabling deployment in environments that have been mapped once but lack LiDAR at runtime.
- Prior-map coverage directly affects performance, with stronger gains where map data overlaps the current scene.
Where Pith is reading between the lines
- The same prior-map idea could be applied to other repeated-route tasks such as lane detection or traffic-sign localization.
- In environments that change over time, the method would need an online map-update module to stay effective.
- Sharing maps across a fleet of vehicles could amplify the benefit by increasing coverage without each vehicle collecting its own priors.
Load-bearing premise
The assumption that vehicles repeatedly traverse the same environments so that accurate, up-to-date static point cloud maps from prior traversals remain available and relevant during later inference.
What would settle it
Evaluating the model on nuScenes or Argoverse 2 sequences where the corresponding prior maps are withheld or replaced with mismatched maps and observing whether localization error stops improving over the camera-only baseline.
Figures



read the original abstract
Camera-based 3D object detection and tracking are central to autonomous driving, yet precise 3D object localization remains fundamentally constrained by depth ambiguity when no expensive, depth-rich online LiDAR is available at inference. In many deployments, however, vehicles repeatedly traverse the same environments, making static point cloud maps from prior traversals a practical source of geometric priors. We propose DualViewMapDet, a camera-only inference framework that retrieves such map priors online and leverages them to mitigate the absence of a LiDAR sensor during deployment. The key idea is a dual-space camera-map fusion strategy that avoids one-sided view conversion. Specifically, we (i) project the map into perspective view (PV) and encode multi-channel geometric cues to enrich image features and support BEV lifting, and (ii) encode the map directly in bird's-eye view (BEV) with a sparse voxel backbone and fuse it with lifted camera features in a shared metric space. Extensive evaluations on nuScenes and Argoverse 2 demonstrate consistent improvements over strong camera-only baselines, with particularly strong gains in object localization. Ablations further validate the contributions of PV/BEV fusion and prior-map coverage. We make the code and pre-trained models available at https://dualviewmapdet.cs.uni-freiburg.de .
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes DualViewMapDet, a camera-only 3D object detection and tracking framework that retrieves static point-cloud map priors from prior LiDAR traversals and fuses them via a dual-space strategy: projecting maps into perspective view (PV) to enrich image features for BEV lifting, and encoding maps directly in bird's-eye view (BEV) with a sparse voxel backbone for fusion with lifted camera features in a shared metric space. Evaluations on nuScenes and Argoverse 2 report consistent gains over camera-only baselines, especially in localization accuracy, supported by ablations on PV/BEV fusion and map coverage; code and models are released.
Significance. If the central assumptions hold, the work offers a practical route to mitigate depth ambiguity in camera-based perception for repeated-route autonomous driving without online LiDAR, potentially narrowing the gap to LiDAR-based methods. The dual-view fusion design and open release of code/models are positive contributions that aid reproducibility and further research.
major comments (2)
- [Experiments] Experiments section (nuScenes/Argoverse 2 results and ablations): The reported gains and the central claim that map priors mitigate depth ambiguity rest on the untested assumption of accurate, up-to-date, and well-aligned prior maps; no experiments evaluate robustness to map drift, environmental changes (e.g., new construction or foliage), or localization errors during online retrieval, which directly affects whether the dual-view fusion adds signal or injects noise.
- [Method] Method section (map retrieval and fusion pipeline): The framework requires reliable online localization to index the correct map region and accurate extrinsic calibration between stored map and live camera, yet the description provides insufficient detail on how these are achieved or their sensitivity; this is load-bearing because failure here would invalidate the PV and BEV fusion benefits claimed in the abstract.
minor comments (2)
- [Abstract] The abstract states 'particularly strong gains in object localization' but the results tables would benefit from explicit reporting of localization-specific metrics (e.g., translation error breakdowns) alongside detection mAP to substantiate this.
- [Method] Notation for the dual-view fusion modules could be clarified with a single diagram or equation summarizing the PV projection and BEV voxel encoding steps to improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and will make corresponding revisions to improve the clarity and completeness of the manuscript.
read point-by-point responses
-
Referee: [Experiments] Experiments section (nuScenes/Argoverse 2 results and ablations): The reported gains and the central claim that map priors mitigate depth ambiguity rest on the untested assumption of accurate, up-to-date, and well-aligned prior maps; no experiments evaluate robustness to map drift, environmental changes (e.g., new construction or foliage), or localization errors during online retrieval, which directly affects whether the dual-view fusion adds signal or injects noise.
Authors: We agree that robustness to map drift, environmental changes, and localization errors during retrieval is an important untested aspect. Our existing ablations on map coverage provide partial evidence on the value of priors, but do not address these failure modes. In the revised manuscript we will add a dedicated discussion of these limitations and include new experiments that simulate map noise, misalignment, and partial environmental changes to quantify when the dual-view fusion remains beneficial versus when it may introduce noise. revision: yes
-
Referee: [Method] Method section (map retrieval and fusion pipeline): The framework requires reliable online localization to index the correct map region and accurate extrinsic calibration between stored map and live camera, yet the description provides insufficient detail on how these are achieved or their sensitivity; this is load-bearing because failure here would invalidate the PV and BEV fusion benefits claimed in the abstract.
Authors: We acknowledge that the original method description was high-level on these practical requirements. The framework relies on standard vehicle localization (e.g., GPS/IMU fused with visual odometry) for map indexing and assumes known extrinsics between the map coordinate frame and the live camera. We will expand the method section with explicit details on the retrieval pipeline, indexing procedure, calibration assumptions, and a brief sensitivity analysis, including references to established practices in map-aided perception. revision: yes
Circularity Check
No circularity in derivation chain
full rationale
The paper introduces DualViewMapDet, a novel dual-view (PV + BEV) fusion architecture that incorporates static prior point-cloud maps into camera-based 3D detection and tracking. The method is defined through explicit new components—map projection into perspective view for feature enrichment, sparse voxel encoding in BEV, and shared-metric-space fusion—then evaluated on independent public benchmarks (nuScenes, Argoverse 2) against camera-only baselines. No equations or claims reduce by construction to fitted parameters defined from the same data, no self-citations serve as load-bearing uniqueness theorems, and no ansatzes or renamings of known results are smuggled in. The derivation chain remains self-contained and externally falsifiable via benchmark performance.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
W. Sun, X. Lin, Y . Shi, C. Zhang, H. Wu, and S. Zheng, “Sparsedrive: End-to-end autonomous driving via sparse scene representation,”arXiv preprint arXiv:2405.19620, 2024
-
[2]
Center-based 3d object detection and tracking,
T. Yin, X. Zhou, and P. Krahenbuhl, “Center-based 3d object detection and tracking,” inIEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 11 784–11 793
2021
-
[3]
A point- based approach to efficient lidar multi-task perception,
C. Lang, A. Braun, L. Schillingmann, and A. Valada, “A point- based approach to efficient lidar multi-task perception,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
2024
-
[4]
Bevfusion: Multi-task multi-sensor fusion with unified bird’s-eye view representation,
Z. Liu, H. Tang, A. Amini, X. Yang, H. Mao, D. Rus, and S. Han, “Bevfusion: Multi-task multi-sensor fusion with unified bird’s-eye view representation,”arXiv preprint arXiv:2205.13542, 2022
-
[5]
H. Cai, Z. Zhang, Z. Zhou,et al., “Bevfusion4d: Learning lidar-camera fusion under bird’s-eye-view via cross-modality guidance and temporal aggregation,”arXiv preprint arXiv:2303.17099, 2023
-
[6]
Is-fusion: Instance-scene collaborative fusion for multimodal 3d object detection,
J. Yin, J. Shen, R. Chen, W. Li, R. Yang, P. Frossard, and W. Wang, “Is-fusion: Instance-scene collaborative fusion for multimodal 3d object detection,” inIEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 14 905–14 915
2024
-
[7]
Progressive multi- modal fusion for robust 3d object detection,
R. Mohan, D. Cattaneo, F. Drews, and A. Valada, “Progressive multi- modal fusion for robust 3d object detection,” inConference on Robot Learning, 2024
2024
-
[8]
arXiv preprint arXiv:2311.11722 (2023)
X. Lin, Z. Pei, T. Lin,et al., “Sparse4d v3: Advancing end-to-end 3d detection and tracking,”arXiv preprint arXiv:2311.11722, 2023
-
[9]
Bridging perspectives: Foundation model guided bev maps for 3d object detection and tracking,
M. Käppeler, Ö. Çiçek, D. Cattaneo, C. Gläser, Y . Miron, and A. Valada, “Bridging perspectives: Foundation model guided bev maps for 3d object detection and tracking,”arXiv preprint arXiv:2510.10287, 2025
-
[10]
Bevdepth: Acquisition of reliable depth for multi-view 3d object detection,
Y . Li, Z. Ge, G. Yu, J. Yang, Z. Wang, Y . Shi, J. Sun, and Z. Li, “Bevdepth: Acquisition of reliable depth for multi-view 3d object detection,” inAAAI Conference on Artificial Intelligence, 2023
2023
-
[11]
Petr: Position embedding transformation for multi-view 3d object detection,
Y . Liu, T. Wang, X. Zhang, and J. Sun, “Petr: Position embedding transformation for multi-view 3d object detection,” inEuropean Conference on Computer Vision, 2022, pp. 531–548
2022
-
[12]
Exploring object- centric temporal modeling for efficient multi-view 3d object detection,
S. Wang, Y . Liu, T. Wang, Y . Li, and X. Zhang, “Exploring object- centric temporal modeling for efficient multi-view 3d object detection,” inInternational Conference on Computer Vision, 2023, pp. 3621–3631
2023
-
[13]
Far3d: Expanding the horizon for surround-view 3d object detection,
“Far3d: Expanding the horizon for surround-view 3d object detection,” inAAAI Conference on Artificial Intelligence, 2024
2024
-
[14]
Ray denoising: Depth-aware hard negative sampling for multi-view 3d object detection,
F. Liu, T. Huang, Q. Zhang, H. Yao, C. Zhang, F. Wan, Q. Ye, and Y . Zhou, “Ray denoising: Depth-aware hard negative sampling for multi-view 3d object detection,” inEuropean Conference on Computer Vision, 2024, pp. 200–217
2024
-
[15]
Bevformer v2: Adapting modern image backbones to bird’s-eye-view recognition via perspective supervision,
C. Yang, Y . Chen, H. Tian, C. Tao, X. Zhu, Z. Zhang,et al., “Bevformer v2: Adapting modern image backbones to bird’s-eye-view recognition via perspective supervision,” inIEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 17 830–17 839
2023
-
[16]
Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d,
J. Philion and S. Fidler, “Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d,” inEuropean Conference on Computer Vision, 2020, pp. 194–210
2020
-
[17]
Bevnext: Reviving dense bev frameworks for 3d object detection,
Z. Li, S. Lan, J. M. Alvarez, and Z. Wu, “Bevnext: Reviving dense bev frameworks for 3d object detection,” inIEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 20 113–20 123
2024
-
[18]
Panoptic nuscenes: A large-scale benchmark for lidar panoptic segmentation and tracking,
W. K. Fong, R. Mohan, J. V . Hurtado, L. Zhou, H. Caesar, O. Beijbom, and A. Valada, “Panoptic nuscenes: A large-scale benchmark for lidar panoptic segmentation and tracking,”Robotics and Automation Letters, vol. 7, no. 2, pp. 3795–3802, 2022
2022
-
[19]
Argoverse 2: Next generation datasets for self-driving perception and forecasting,
B. Wilson, W. Qi, T. Agarwal, J. Lambert, J. Singh, S. Khandelwal, et al., “Argoverse 2: Next generation datasets for self-driving perception and forecasting,” inProc. of the Neural Information Processing Systems Track on Datasets and Benchmarks, 2021
2021
-
[20]
Second: Sparsely embedded convolutional detection,
Y . Yan, Y . Mao, and B. Li, “Second: Sparsely embedded convolutional detection,”Sensors, vol. 18, no. 10, p. 3337, 2018
2018
-
[21]
Evcenternet: Uncertainty estimation for object detection using evidential learning,
M. R. Nallapareddy, K. Sirohi, P. L. Drews, W. Burgard, C.-H. Cheng, and A. Valada, “Evcenternet: Uncertainty estimation for object detection using evidential learning,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, 2023, pp. 5699–5706
2023
-
[22]
3d multi-object tracking using graph neural networks with cross-edge modality attention,
M. Büchner and A. Valada, “3d multi-object tracking using graph neural networks with cross-edge modality attention,”Robotics and Automation Letters, vol. 7, no. 4, pp. 9707–9714, 2022
2022
-
[23]
Transfusion: Robust lidar-camera fusion for 3d object detection with transformers,
X. Bai, Z. Hu, X. Zhu, Q. Huang, Y . Chen, H. Fu, and C.-L. Tai, “Transfusion: Robust lidar-camera fusion for 3d object detection with transformers,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2022, pp. 1090–1099
2022
-
[24]
EA-LSS: Edge-aware Lift-splat-shot Framework for 3D BEV Object Detection,
H. Hu, F. Wang, J. Su, Y . Wang, L. Hu, W. Fang, J. Xu, and Z. Zhang, “Ea-lss: Edge-aware lift-splat-shot framework for 3d bev object detection,”arXiv preprint arXiv:2303.17895, 2023
-
[25]
Graphbev: Towards robust bev feature alignment for multi-modal 3d object detection,
Z. Song, L. Yang, S. Xu, L. Liu, D. Xu, C. Jia, F. Jia, and L. Wang, “Graphbev: Towards robust bev feature alignment for multi-modal 3d object detection,” inEuropean Conference on Computer Vision, 2024
2024
-
[26]
Sparse3dtrack: Monocular 3d object tracking using sparse supervision,
N. Gosala, B. R. Kiran, S. Yogamani, and A. Valada, “Sparse3dtrack: Monocular 3d object tracking using sparse supervision,”arXiv preprint arXiv:2603.18298, 2026
-
[27]
Presight: Enhancing autonomous vehicle perception with city-scale nerf priors,
T. Yuan, Y . Mao, J. Yang, Y . Liu, Y . Wang, and H. Zhao, “Presight: Enhancing autonomous vehicle perception with city-scale nerf priors,” inEuropean Conference on Computer Vision, 2024, pp. 323–339
2024
-
[28]
S. Yuan, J. Wei, M. Tie, X. Ren, Z. Gan, and W. Ding, “Lmpocc: 3d semantic occupancy prediction utilizing long-term memory prior from historical traversals,”arXiv preprint arXiv:2504.13596, 2025
-
[29]
Collaborative perceiver: Elevating vision-based 3d object detection via local density-aware dense spatial occupancy,
J. Yuan, M. Nguyen-Duc, Q. Liu, M. Hauswirth, and D. Le-Phuoc, “Collaborative perceiver: Elevating vision-based 3d object detection via local density-aware dense spatial occupancy,” inInternational Conference on Neural Information Processing, 2025, pp. 48–62
2025
-
[30]
Z. Yu and C. Shu, “Ultimatedo: An efficient framework to marry occupancy prediction with 3d object detection via channel2height,” arXiv preprint arXiv:2409.11160, 2024
-
[31]
Memorize what matters: Emergent scene decomposition from multitraverse,
Y . Li, Z. Wang, Y . Wang, Z. Yu, Z. Gojcic, M. Pavone, C. Feng, and J. M. Alvarez, “Memorize what matters: Emergent scene decomposition from multitraverse,”Advances in Neural Information Processing Systems, vol. 37, pp. 108 389–108 438, 2024
2024
-
[32]
Hindsight is 20/20: Leveraging past traversals to aid 3d perception,
Y . You, K. Z. Luo, X. Chen, J. Chen, W.-L. Chao, W. Sun, B. Hariharan, M. Campbell, and K. Q. Weinberger, “Hindsight is 20/20: Leveraging past traversals to aid 3d perception,” inInternational Conference on Learning Representations, 2022
2022
-
[33]
Better monocular 3d detectors with lidar from the past,
Y . You, C. P. Phoo, C. A. Diaz-Ruiz, K. Z. Luo, W.-L. Chao, M. Campbell, B. Hariharan, and K. Q. Weinberger, “Better monocular 3d detectors with lidar from the past,” inIEEE International Conference on Robotics and Automation, 2024, pp. 6634–6641
2024
-
[34]
Open3D: A Modern Library for 3D Data Processing
Q.-Y . Zhou, J. Park, and V . Koltun, “Open3d: A modern library for 3d data processing,”arXiv preprint arXiv:1801.09847, 2018
work page internal anchor Pith review arXiv 2018
-
[35]
Attention is all you need,
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention is all you need,”Advances in Neural Information Processing Systems, vol. 30, 2017
2017
-
[36]
Cmrnext: Camera to lidar matching in the wild for localization and extrinsic calibration,
D. Cattaneo and A. Valada, “Cmrnext: Camera to lidar matching in the wild for localization and extrinsic calibration,”IEEE Transactions on Robotics, 2025
2025
-
[37]
Deep residual learning for image recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image recognition,” inIEEE/CVF Conference on Computer Vision and Pattern Recognition, 2016, pp. 770–778
2016
-
[38]
P. Chen, S. Liu, H. Zhao, X. Wang, and J. Jia, “Gridmask data augmentation,”arXiv preprint arXiv:2001.04086, 2020
-
[39]
An energy and gpu- computation efficient backbone network for real-time object detection,
Y . Lee, J.-w. Hwang, S. Lee, Y . Bae, and J. Park, “An energy and gpu- computation efficient backbone network for real-time object detection,” inProc. of the IEEE/CVF conf. on computer vision and pattern recognition workshops, 2019
2019
-
[40]
Kiss-matcher: Fast and robust point cloud registration re- visited,
H. Lim, D. Kim, G. Shin, J. Shi, I. Vizzo, H. Myung, J. Park, and L. Carlone, “Kiss-matcher: Fast and robust point cloud registration re- visited,” inIEEE International Conference on Robotics and Automation, 2025, pp. 11 104–11 111
2025
-
[41]
Exploring recurrent long-term temporal fusion for multi-view 3d perception,
C. Han, J. Yang, J. Sun, Z. Ge, R. Dong, H. Zhou, W. Mao, Y . Peng, and X. Zhang, “Exploring recurrent long-term temporal fusion for multi-view 3d perception,”Robotics and Automation Letters, vol. 9, no. 7, pp. 6544–6551, 2024
2024
-
[42]
Quality matters: Embracing quality clues for robust 3d multi-object tracking,
J. Yang, E. Yu, Z. Li, X. Li, and W. Tao, “Quality matters: Embracing quality clues for robust 3d multi-object tracking,”arXiv preprint arXiv:2208.10976, 2022
-
[43]
Dort: Modeling dynamic objects in recurrent for multi-camera 3d object detection and tracking,
L. Qing, T. Wang, D. Lin, and J. Pang, “Dort: Modeling dynamic objects in recurrent for multi-camera 3d object detection and tracking,” inConference on Robot Learning, 2023, pp. 3749–3765
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.