Recognition: unknown
HiPAN: Hierarchical Posture-Adaptive Navigation for Quadruped Robots in Unstructured 3D Environments
Pith reviewed 2026-05-07 10:56 UTC · model grok-4.3
The pith
HiPAN lets quadruped robots navigate complex 3D spaces by adapting posture through a hierarchical policy on depth images.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
HiPAN adopts a hierarchical design where a high-level policy generates strategic navigation commands consisting of planar velocity and body posture from depth images, which a low-level posture-adaptive locomotion controller then executes. Path-Guided Curriculum Learning progressively extends the navigation horizon to enable strategic behavior, leading to higher navigation success rates and greater path efficiency than classical reactive planners and end-to-end baselines in simulation, with further validation in real-world unstructured 3D environments.
What carries the argument
The hierarchical architecture of a high-level policy for velocity and posture commands paired with a low-level posture-adaptive locomotion controller, augmented by Path-Guided Curriculum Learning to develop long-horizon navigation skills.
If this is right
- Quadrupeds can navigate without accumulating errors from separate perception and planning stages.
- Resource-constrained robots can perform the task onboard using only depth images.
- The approach enables escaping local minima through strategic posture changes.
- Performance improvements hold across diverse real-world unstructured environments.
Where Pith is reading between the lines
- Posture adaptation learned this way might apply to other tasks like manipulation in tight spaces.
- Curriculum progression from reactive to strategic could help in training other robot behaviors requiring foresight.
- Reducing reliance on full mapping could make deployment faster in new environments.
- The success in sim-to-real transfer suggests depth-based policies are sufficient for many 3D traversal problems.
Load-bearing premise
Depth images provide sufficient information for reliable long-horizon decisions on posture adaptation, and the policy trained in simulation transfers to real unstructured environments without major failures or instability.
What would settle it
A real robot test in a sequence of low-ceiling and narrow passages where the depth-only policy causes the robot to misjudge posture needs and collide or fail to advance, while a map-based planner completes the path successfully.
Figures






read the original abstract
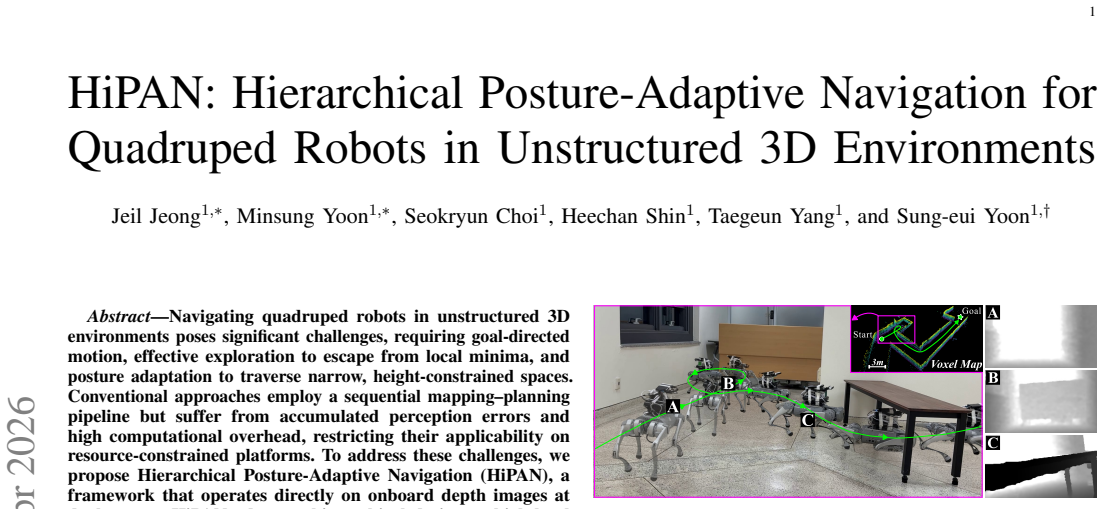
Navigating quadruped robots in unstructured 3D environments poses significant challenges, requiring goal-directed motion, effective exploration to escape from local minima, and posture adaptation to traverse narrow, height-constrained spaces. Conventional approaches employ a sequential mapping-planning pipeline but suffer from accumulated perception errors and high computational overhead, restricting their applicability on resource-constrained platforms. To address these challenges, we propose Hierarchical Posture-Adaptive Navigation (HiPAN), a framework that operates directly on onboard depth images at deployment. HiPAN adopts a hierarchical design: a high-level policy generates strategic navigation commands (planar velocity and body posture), which are executed by a low-level, posture-adaptive locomotion controller. To mitigate myopic behaviors and facilitate long-horizon navigation, we introduce Path-Guided Curriculum Learning, which progressively extends the navigation horizon from reactive obstacle avoidance to strategic navigation. In simulation, HiPAN achieves higher navigation success rates and greater path efficiency than classical reactive planners and end-to-end baselines, while real-world experiments further validate its applicability across diverse, unstructured 3D environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes HiPAN, a hierarchical navigation framework for quadruped robots operating in unstructured 3D environments. A high-level policy generates strategic commands (planar velocity and body posture) from onboard depth images; these are tracked by a low-level posture-adaptive locomotion controller. Path-Guided Curriculum Learning is introduced to progressively extend the training horizon from reactive avoidance to longer-range strategic navigation. The central empirical claim is that HiPAN attains higher navigation success rates and better path efficiency than classical reactive planners and end-to-end baselines in simulation, with additional real-world validation across diverse unstructured terrains.
Significance. If the performance claims are substantiated with transparent metrics and the curriculum is shown to confer genuine long-horizon capability without privileged information at test time, the work would offer a practical advance for resource-constrained legged platforms by avoiding explicit mapping-planning pipelines while still handling posture adaptation and local-minima escape. The hierarchical decomposition and curriculum strategy address recognized limitations of purely reactive or end-to-end policies.
major comments (2)
- [Abstract and §3 (Path-Guided Curriculum Learning)] Abstract and §3 (Path-Guided Curriculum Learning): the abstract states that the deployed system 'operates directly on onboard depth images,' yet the curriculum is described as supplying path guidance to achieve 'strategic navigation' beyond myopic obstacle avoidance. It is not stated whether path/waypoint information remains available at inference or is used only during training. If the latter, the learned policy may still be locally reactive; any reported gains in success rate or path efficiency would then not demonstrate the claimed long-horizon strategic behavior. This distinction is load-bearing for the central claim.
- [§4 (Experiments)] §4 (Experiments): the abstract asserts 'higher navigation success rates and greater path efficiency' without reporting numerical values, error bars, exact baseline implementations, or ablation results on the curriculum. The full experimental section must supply these (e.g., success-rate tables, path-length statistics, and curriculum ablations) with statistical significance tests; otherwise the magnitude and robustness of the improvement cannot be evaluated.
minor comments (1)
- [Abstract] The abstract would benefit from including at least one concrete quantitative result (e.g., 'success rate of X% versus Y% for baseline Z') to convey the empirical contribution more precisely.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. The comments highlight important aspects of clarity and experimental rigor that we address point by point below. We have prepared revisions to strengthen the presentation of our contributions.
read point-by-point responses
-
Referee: [Abstract and §3 (Path-Guided Curriculum Learning)] Abstract and §3 (Path-Guided Curriculum Learning): the abstract states that the deployed system 'operates directly on onboard depth images,' yet the curriculum is described as supplying path guidance to achieve 'strategic navigation' beyond myopic obstacle avoidance. It is not stated whether path/waypoint information remains available at inference or is used only during training. If the latter, the learned policy may still be locally reactive; any reported gains in success rate or path efficiency would then not demonstrate the claimed long-horizon strategic behavior. This distinction is load-bearing for the central claim.
Authors: We appreciate the referee's emphasis on this critical distinction, which is indeed central to our claims. In HiPAN, the Path-Guided Curriculum Learning supplies path and waypoint information exclusively during training to shape the high-level policy toward longer-horizon behaviors and escape from local minima. At deployment and inference time, the policy receives only onboard depth images as input, with no path, waypoint, or privileged information of any kind. This is consistent with the abstract's statement that the system 'operates directly on onboard depth images at deployment.' The curriculum enables the policy to internalize strategic navigation capabilities that manifest as improved reactive decisions from depth alone. We will revise the abstract and §3 to explicitly state that path guidance is training-only and confirm the absence of such information at test time. revision: yes
-
Referee: [§4 (Experiments)] §4 (Experiments): the abstract asserts 'higher navigation success rates and greater path efficiency' without reporting numerical values, error bars, exact baseline implementations, or ablation results on the curriculum. The full experimental section must supply these (e.g., success-rate tables, path-length statistics, and curriculum ablations) with statistical significance tests; otherwise the magnitude and robustness of the improvement cannot be evaluated.
Authors: We agree that transparent and detailed quantitative reporting is necessary to substantiate the performance claims. Section 4 already presents success-rate comparisons and path-efficiency metrics against classical reactive planners and end-to-end baselines, along with real-world validation. To address the referee's request fully, we will expand the experimental section in the revised manuscript to include: (i) numerical values with error bars from multiple independent runs, (ii) precise descriptions of baseline implementations, (iii) dedicated ablation studies isolating the curriculum components, (iv) additional path-length and efficiency statistics, and (v) statistical significance tests (e.g., paired t-tests) on the reported improvements. These additions will allow readers to evaluate the magnitude and robustness of the results. revision: yes
Circularity Check
No circularity: empirical claims rest on external simulation and real-world validation
full rationale
The paper describes HiPAN as a hierarchical policy framework trained with path-guided curriculum learning and evaluated via direct comparisons to reactive planners and end-to-end baselines in simulation plus real-world tests. No equations, first-principles derivations, or predictions are presented that reduce by construction to fitted inputs, self-definitions, or self-citation chains. Performance metrics are reported as measured outcomes against independent baselines rather than quantities defined from the method itself, leaving the central claims self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- neural network weights and RL hyperparameters
axioms (1)
- domain assumption The navigation task can be formulated as a Markov decision process with depth images as observations
Reference graph
Works this paper leans on
-
[1]
Step: Stochastic traversability evaluation and planning for risk-aware off-road navigation,
D. D. Fanet al., “Step: Stochastic traversability evaluation and planning for risk-aware off-road navigation,”arXiv preprint arXiv:2103.02828, 2021
-
[2]
arXiv preprint arXiv:2103.11470 , year=
A. Aghaet al., “Nebula: Quest for robotic autonomy in challenging environments; team costar at the darpa subterranean challenge,”arXiv preprint arXiv:2103.11470, 2021
-
[3]
Robot parkour learning,
Z. Zhuanget al., “Robot parkour learning,” inConference on Robot Learning. PMLR, 2023, pp. 73–92
2023
-
[4]
Learning to walk in confined spaces using 3d representa- tion,
T. Mikiet al., “Learning to walk in confined spaces using 3d representa- tion,” inInternational Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 8649–8656
2024
-
[5]
Lifelike agility and play in quadrupedal robots using reinforcement learning and generative pre-trained models,
L. Hanet al., “Lifelike agility and play in quadrupedal robots using reinforcement learning and generative pre-trained models,”Nature Machine Intelligence, vol. 6, no. 7, pp. 787–798, 2024
2024
-
[6]
Walk these ways: Tuning robot control for generalization with multiplicity of behavior,
G. B. Margolis and P. Agrawal, “Walk these ways: Tuning robot control for generalization with multiplicity of behavior,” inConference on Robot Learning. PMLR, 2023, pp. 22–31
2023
-
[7]
Palo: Learning posture-aware locomotion for quadruped robots,
X. Miaoet al., “Palo: Learning posture-aware locomotion for quadruped robots,”arXiv preprint arXiv:2503.04462, 2025
-
[8]
Perceptive whole-body planning for multilegged robots in confined spaces,
R. Buchananet al., “Perceptive whole-body planning for multilegged robots in confined spaces,”Journal of Field Robotics, vol. 38, no. 1, pp. 68–84, 2021
2021
-
[9]
Autonomous navigation of underactuated bipedal robots in height-constrained environments,
Z. Liet al., “Autonomous navigation of underactuated bipedal robots in height-constrained environments,”The International Journal of Robotics Research, vol. 42, no. 8, pp. 565–585, 2023
2023
-
[10]
Dexterous legged locomotion in confined 3d spaces with reinforcement learning,
Z. Xuet al., “Dexterous legged locomotion in confined 3d spaces with reinforcement learning,” inInternational Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 11 474–11 480
2024
-
[11]
An autonomous maze-solving robotic system based on an enhanced wall-follower approach,
S. Alamriet al., “An autonomous maze-solving robotic system based on an enhanced wall-follower approach,”Machines, vol. 11, no. 2, p. 249, 2023
2023
-
[12]
An improved algorithm for collision avoidance in environments having u and h shaped obstacles,
M. Zohaibet al., “An improved algorithm for collision avoidance in environments having u and h shaped obstacles,”Studies in Informatics and Control, vol. 23, no. 1, pp. 97–106, 2014
2014
-
[13]
A new approach to mobile robot navigation in unknown environments,
M. Abafogiet al., “A new approach to mobile robot navigation in unknown environments,” inInternational Conference on Electronics, Computers and Artificial Intelligence (ECAI). IEEE, 2018, pp. 1–5
2018
-
[14]
A comparative study of bug algorithms for robot navigation,
K. N. McGuireet al., “A comparative study of bug algorithms for robot navigation,”Robotics and Autonomous Systems, vol. 121, p. 103261, 2019
2019
-
[15]
Learning a state representation and navigation in cluttered and dynamic environments,
D. Hoelleret al., “Learning a state representation and navigation in cluttered and dynamic environments,”IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 5081–5088, 2021
2021
-
[16]
Vinl: Visual navigation and locomotion over obstacles,
S. Kareeret al., “Vinl: Visual navigation and locomotion over obstacles,” inInternational Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 2018–2024
2023
-
[17]
Agile but safe: Learning collision-free high-speed legged locomotion,
T. He, C. Zhang, W. Xiao, G. He, C. Liu, and G. Shi, “Agile but safe: Learning collision-free high-speed legged locomotion,”arXiv preprint arXiv:2401.17583, 2024
-
[18]
Advanced skills by learning locomotion and local navigation end-to-end,
N. Rudinet al., “Advanced skills by learning locomotion and local navigation end-to-end,” inInternational Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 2497–2503
2022
-
[19]
Learning robust autonomous navigation and locomotion for wheeled-legged robots,
J. Leeet al., “Learning robust autonomous navigation and locomotion for wheeled-legged robots,”Science Robotics, vol. 9, no. 89, p. eadi9641, 2024
2024
-
[20]
Co-pilot: Collaborative planning and reinforcement learning on sub-task curriculum,
S. Aoet al., “Co-pilot: Collaborative planning and reinforcement learning on sub-task curriculum,”Advances in Neural Information Processing Systems, vol. 34, pp. 10 444–10 456, 2021
2021
-
[21]
Hindsight intermediate targets for mapless navigation with deep reinforcement learning,
Y . Jang, J. Baek, and S. Han, “Hindsight intermediate targets for mapless navigation with deep reinforcement learning,”IEEE Transactions on Industrial Electronics, vol. 69, no. 11, pp. 11 816–11 825, 2021
2021
-
[22]
Efficient hierarchical reinforcement learning for mapless navigation with predictive neighbouring space scoring,
Y . Gaoet al., “Efficient hierarchical reinforcement learning for mapless navigation with predictive neighbouring space scoring,”IEEE Transac- tions on Automation Science and Engineering, 2023
2023
-
[23]
Hierarchical reinforcement learning for safe mapless navigation with congestion estimation,
J. Gaoet al., “Hierarchical reinforcement learning for safe mapless navigation with congestion estimation,”arXiv preprint arXiv:2503.12036, 2025
-
[24]
Learning quadrupedal locomotion over challenging terrain,
J. Leeet al., “Learning quadrupedal locomotion over challenging terrain,” Science robotics, vol. 5, no. 47, p. eabc5986, 2020
2020
-
[25]
Learning robust perceptive locomotion for quadrupedal robots in the wild,
T. Mikiet al., “Learning robust perceptive locomotion for quadrupedal robots in the wild,”Science robotics, vol. 7, no. 62, p. eabk2822, 2022
2022
-
[26]
Learning quadrupedal locomotion on deformable terrain,
S. Choiet al., “Learning quadrupedal locomotion on deformable terrain,” Science Robotics, vol. 8, no. 74, p. eade2256, 2023
2023
-
[27]
Rma: Rapid motor adaptation for legged robots,
A. Kumaret al., “Rma: Rapid motor adaptation for legged robots,” Robotics: Science and Systems, 2021
2021
-
[28]
# exploration: A study of count-based exploration for deep reinforcement learning,
H. Tanget al., “# exploration: A study of count-based exploration for deep reinforcement learning,”Advances in neural information processing systems, vol. 30, 2017
2017
-
[29]
The impact of intrinsic rewards on exploration in reinforcement learning,
A. Kayalet al., “The impact of intrinsic rewards on exploration in reinforcement learning,”arXiv preprint arXiv:2501.11533, 2025
-
[30]
Learning multi-agent loco-manipulation for long-horizon quadrupedal pushing,
Y . Fenget al., “Learning multi-agent loco-manipulation for long-horizon quadrupedal pushing,”arXiv preprint arXiv:2411.07104, 2024
-
[31]
Resilient legged local navigation: Learning to traverse with compromised perception end-to-end,
C. Zhanget al., “Resilient legged local navigation: Learning to traverse with compromised perception end-to-end,” inInternational Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 34–41
2024
-
[32]
Learning to walk by steering: Perceptive quadrupedal locomotion in dynamic environments,
M. Seoet al., “Learning to walk by steering: Perceptive quadrupedal locomotion in dynamic environments,” inInternational Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 5099–5105
2023
-
[33]
Wave Function Collapse Algorithm,
M. Gumin, “Wave Function Collapse Algorithm,” Sep. 2016. [Online]. Available: https://github.com/mxgmn/WaveFunctionCollapse
2016
-
[34]
Proximal Policy Optimization Algorithms
J. Schulmanet al., “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review arXiv 2017
-
[35]
A reduction of imitation learning and structured prediction to no-regret online learning,
S. Rosset al., “A reduction of imitation learning and structured prediction to no-regret online learning,” inInternational conference on artificial intelligence and statistics. JMLR Workshop and Conference Proceedings, 2011, pp. 627–635
2011
-
[36]
Learning by cheating,
D. Chenet al., “Learning by cheating,” inConference on Robot Learning. PMLR, 2020, pp. 66–75
2020
-
[37]
Rapid locomotion via reinforcement learning,
G. B. Margoliset al., “Rapid locomotion via reinforcement learning,”The International Journal of Robotics Research, vol. 43, no. 4, pp. 572–587, 2024
2024
-
[38]
An analysis of model-based interval estimation for markov decision processes,
A. L. Strehl and M. L. Littman, “An analysis of model-based interval estimation for markov decision processes,”Journal of Computer and System Sciences, vol. 74, no. 8, pp. 1309–1331, 2008
2008
-
[39]
Unitree, “Go1,” https://www.unitree.com/go1, 2021
2021
-
[40]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V . Makoviychuket al., “Isaac gym: High performance gpu-based physics simulation for robot learning,”arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review arXiv 2021
-
[41]
Path planning in complex environments with superquadrics and voronoi-based orientation,
L. Yanget al., “Path planning in complex environments with superquadrics and voronoi-based orientation,”arXiv preprint arXiv:2411.05279, 2024
-
[42]
Moe-loco: Mixture of experts for multitask locomotion,
R. Huanget al., “Moe-loco: Mixture of experts for multitask locomotion,” arXiv preprint arXiv:2503.08564, 2025
-
[43]
On Evaluation of Embodied Navigation Agents
P. Andersonet al., “On evaluation of embodied navigation agents,”arXiv preprint arXiv:1807.06757, 2018
work page internal anchor Pith review arXiv 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.