Recognition: unknown
MiniVLA-Nav v1: A Multi-Scene Simulation Dataset for Language-Conditioned Robot Navigation
Pith reviewed 2026-05-09 19:32 UTC · model grok-4.3
The pith
The MiniVLA-Nav v1 dataset pairs natural language instructions with expert navigation actions for a robot to approach named objects in four simulated environments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
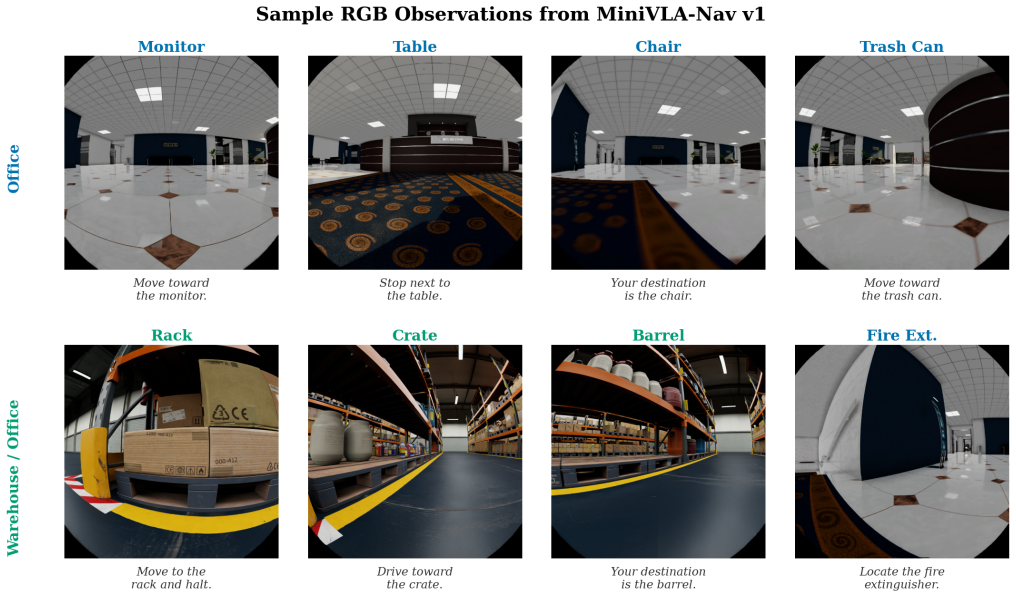
MiniVLA-Nav v1 is a simulation dataset for Language-Conditioned Object Approach navigation consisting of 1,174 episodes across Office, Hospital, Full Warehouse, and Warehouse with Multiple Shelves environments, each providing synchronized RGB images, metric depth maps, instance segmentation masks, and expert velocity commands from a vision-based proportional controller.
What carries the argument
The core mechanism is the collection of episodes that link language instructions to visual observations and expert actions, with diversity ensured by spawn-distance tiers, multiple object categories, and paraphrased templates.
If this is right
- Five evaluation splits allow testing for in-distribution performance, robustness to paraphrased instructions, and generalization to new object categories.
- Trajectory lengths correlate strongly with spawn distances, enabling analysis of navigation over varying ranges.
- The inclusion of both continuous and tokenized action labels supports different types of policy learning.
- Public availability facilitates community use for advancing language-conditioned robot navigation research.
Where Pith is reading between the lines
- Training on this data might reveal whether language conditioning improves navigation success compared to vision-only approaches in simulation.
- Success in these environments could serve as a stepping stone for testing sim-to-real transfer in physical robot navigation.
- The dataset's structure with instance segmentation suggests potential for incorporating object detection models into navigation pipelines.
Load-bearing premise
The expert actions generated by the vision-based proportional controller provide optimal or at least sufficient demonstrations for learning effective navigation policies, and the simulated scenes accurately reflect real-world conditions.
What would settle it
Observing that policies trained solely on this dataset achieve low success rates in approaching the target objects within the simulation environments would indicate the data is insufficient.
Figures







read the original abstract
We present MiniVLA-Nav v1, a simulation dataset for Language-Conditioned Object Approach (LCOA) navigation: given a short natural-language instruction, an NVIDIA Nova Carter differential-drive robot must navigate to the named object and stop within 1 m across four photorealistic Isaac Sim environments (Office, Hospital, Full Warehouse, and Warehouse with Multiple Shelves). Each of the 1,174 episodes pairs an instruction with synchronized 640x640 RGB images, metric depth maps (float32, metres), and instance segmentation masks, together with continuous (v,omega) and 7x7 tokenized expert action labels recorded at 60 Hz from a vision-based proportional controller. Trajectory diversity is ensured through three spawn-distance tiers (near: 1.5-3.5 m, mid: 3.5-7.0 m, far: global curated points; Pearson r=0.94 between spawn distance and trajectory length), 12 object categories, 18 training templates, and 12 paraphrase-OOD templates. Five evaluation splits support in-distribution accuracy, template-paraphrase robustness, and OOD object-category benchmarking. The dataset is publicly available at https://huggingface.co/datasets/alibustami/miniVLA-Nav
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents MiniVLA-Nav v1, a simulation dataset for language-conditioned object approach (LCOA) navigation. An NVIDIA Nova Carter differential-drive robot must reach an object named in a short natural-language instruction and stop within 1 m. The release contains 1,174 episodes across four Isaac Sim environments (Office, Hospital, Full Warehouse, Warehouse with Multiple Shelves), each supplying synchronized 640×640 RGB, metric depth, instance segmentation, continuous (v, ω) commands, and 7×7 tokenized expert actions recorded at 60 Hz from a vision-based proportional controller. Diversity is obtained via three spawn-distance tiers (near/mid/far), 12 object categories, 18 training templates plus 12 paraphrase-OOD templates, and a reported Pearson r = 0.94 between spawn distance and trajectory length. Five evaluation splits target in-distribution accuracy, template robustness, and OOD object-category generalization. The dataset is released at https://huggingface.co/datasets/alibustami/miniVLA-Nav.
Significance. If the expert trajectories are competent, the dataset would supply a useful public resource for training and benchmarking vision-language-action models on multi-scene navigation with language instructions. The combination of photorealistic environments, synchronized multi-modal observations, both continuous and tokenized actions, and explicit OOD splits directly targets generalization challenges that are central to current VLA research. The public Hugging Face release and the reported correlation between spawn distance and path length are concrete strengths that support reproducibility.
major comments (1)
- [Abstract] Abstract: the central claim that MiniVLA-Nav v1 supplies usable training data for language-conditioned navigation rests on the expert actions being competent demonstrations. No success rate, collision frequency, path-efficiency, or failure-mode statistics are reported for the single vision-based proportional controller that generated all 1,174 trajectories. In the Warehouse with Multiple Shelves environment this controller can plausibly produce oscillations or collisions when objects are occluded or duplicated, yet the absence of any quantitative controller evaluation leaves the dataset’s training utility unverified.
minor comments (2)
- The description of the far spawn tier (“global curated points”) is too terse; a brief statement of the curation criteria or a supplementary figure showing example start-goal pairs would improve reproducibility.
- It is unclear whether the 7×7 tokenized action labels are obtained by direct discretization of the recorded (v, ω) values or by an independent policy; stating the exact mapping would remove ambiguity for users who wish to train on the tokenized format.
Simulated Author's Rebuttal
We appreciate the referee's thorough review and constructive feedback on our manuscript describing MiniVLA-Nav v1. We address the major comment regarding the evaluation of the expert controller below, and we will incorporate the suggested improvements in the revised manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that MiniVLA-Nav v1 supplies usable training data for language-conditioned navigation rests on the expert actions being competent demonstrations. No success rate, collision frequency, path-efficiency, or failure-mode statistics are reported for the single vision-based proportional controller that generated all 1,174 trajectories. In the Warehouse with Multiple Shelves environment this controller can plausibly produce oscillations or collisions when objects are occluded or duplicated, yet the absence of any quantitative controller evaluation leaves the dataset’s training utility unverified.
Authors: We thank the referee for this important observation. The dataset was generated using a single vision-based proportional controller without any post-filtering for success or collision-free paths, precisely to capture realistic navigation behaviors including potential challenges in complex scenes like the Warehouse with Multiple Shelves. We agree that reporting quantitative metrics on controller performance is necessary to substantiate the dataset's value for VLA training. In the revised version of the manuscript, we will add an analysis section that includes: success rates (percentage of episodes where the robot stops within 1m of the target without timeout), collision frequencies (instances where the robot's body intersects with obstacles or other objects, as logged in Isaac Sim), path efficiency (actual trajectory length vs. straight-line distance), and a discussion of observed failure modes such as oscillations around similar objects. This will be computed across the different environments and spawn-distance tiers. We believe these additions will directly address the concern and enhance the paper's contribution. revision: yes
Circularity Check
No circularity: direct dataset release with no derivations
full rationale
The paper presents a simulation dataset for language-conditioned navigation, describing 1,174 episodes generated by recording actions from a vision-based proportional controller in Isaac Sim environments. No equations, predictions, first-principles derivations, or load-bearing claims are made that reduce to the inputs by construction. The contribution is the data release itself (with splits, templates, and modalities), which stands independently without any self-referential loops, fitted inputs renamed as predictions, or uniqueness theorems imported from prior self-work. This matches the default expectation for a non-derivational paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The Isaac Sim environments provide photorealistic and accurate physics for navigation tasks.
Reference graph
Works this paper leans on
-
[1]
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
A. Brohan, N. Brown, J. Carbajalet al., “RT-2: Vision-language-action models transfer web knowledge to robotic control,” inProceedings of the 7th Conference on Robot Learning (CoRL), 2023. [Online]. Available: https://arxiv.org/abs/2307.15818
work page internal anchor Pith review arXiv 2023
-
[2]
OpenVLA: An Open-Source Vision-Language-Action Model
M. J. Kim, K. Pertsch, S. Karamchetiet al., “OpenVLA: An open-source vision-language-action model,” inProceedings of the 8th Conference on Robot Learning (CoRL), 2024. [Online]. Available: https://arxiv.org/abs/2406.09246
work page internal anchor Pith review arXiv 2024
-
[3]
Octo: An Open-Source Generalist Robot Policy
Octo Model Team, D. Ghosh, H. Walkeet al., “Octo: An open-source generalist robot policy,” inProceedings of Robotics: Science and Systems (RSS), 2024. [Online]. Available: https://arxiv.org/abs/2405.12213
work page internal anchor Pith review arXiv 2024
-
[4]
Beyond the Nav-Graph: Vision-and-language navigation in continuous environ- ments,
J. Krantz, E. Wijmans, A. Majumdar, D. Batra, and S. Lee, “Beyond the Nav-Graph: Vision-and-language navigation in continuous environ- ments,” inEuropean Conference on Computer Vision (ECCV), 2020
2020
-
[5]
Object goal navigation using goal-oriented semantic exploration,
D. S. Chaplot, D. P. Gandhi, A. Gupta, and R. Salakhutdinov, “Object goal navigation using goal-oriented semantic exploration,” inAdvances in Neural Information Processing Systems (NeurIPS), vol. 33, 2020. [Online]. Available: https://arxiv.org/abs/2007.00643
-
[6]
ALFRED: A benchmark for interpreting grounded instructions for everyday tasks,
M. Shridhar, J. Thomason, D. Gordonet al., “ALFRED: A benchmark for interpreting grounded instructions for everyday tasks,” inProceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2020
2020
-
[7]
Vision-and-language navigation: Interpreting visually-grounded navigation instructions in real environ- ments,
P. Anderson, Q. Wu, D. Teneyet al., “Vision-and-language navigation: Interpreting visually-grounded navigation instructions in real environ- ments,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2018
2018
-
[8]
Touchdown: Natural language navigation and spatial reasoning in visual street envi- ronments,
H. Chen, A. Suhr, D. Misra, N. Snavely, and Y . Artzi, “Touchdown: Natural language navigation and spatial reasoning in visual street envi- ronments,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019
2019
-
[9]
Vision-and- language navigation: A survey of tasks, methods, and future directions,
J. Gu, E. Stefani, Q. Wu, J. Thomason, and X. E. Wang, “Vision-and- language navigation: A survey of tasks, methods, and future directions,” inProceedings of the 60th Annual Meeting of the Association for Computational Linguistics (ACL), 2022
2022
-
[10]
Habitat 2.0: Training home assistants to rearrange their habitat
A. Szot, A. Clegg, E. Undersanderet al., “Habitat 2.0: Training home assistants to rearrange their habitat,” inAdvances in Neural Information Processing Systems (NeurIPS), vol. 34, 2021. [Online]. Available: https://arxiv.org/abs/2106.14405
-
[11]
D. Batra, A. X. Chang, S. Chernovaet al., “ObjectNav revisited: On evaluation of embodied agents navigating to objects,” in arXiv preprint arXiv:2006.13171, 2020. [Online]. Available: https: //arxiv.org/abs/2006.13171
-
[12]
P. Sermanet, T. Ding, J. Zhaoet al., “RoboVQA: Multimodal long- horizon reasoning for robotics,” https://arxiv.org/abs/2311.00899, 2023
-
[13]
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment Collaboration, A. Padalkar, A. Pooleyet al., “Open X-Embodiment: Robotic learning datasets and RT-X models,” https://arxiv.org/abs/2310.08864, 2023
work page internal anchor Pith review arXiv 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.