Recognition: unknown
Physically Native World Models: A Hamiltonian Perspective on Generative World Modeling
Pith reviewed 2026-05-09 19:57 UTC · model grok-4.3
The pith
World models achieve physically reliable predictions by encoding observations into a latent phase space and evolving states with Hamiltonian-inspired dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
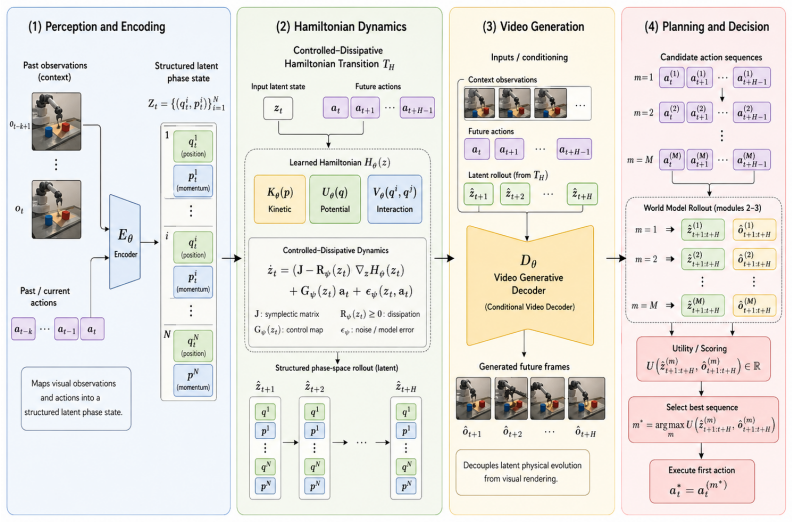
The central claim is that world models become physically meaningful when observations are mapped to a latent phase space whose evolution follows Hamiltonian dynamics augmented by control inputs, dissipative terms, and residual corrections; the predicted latent trajectories are then decoded to future observations, yielding rollouts that support planning with greater long-horizon stability and physical consistency than purely generative or abstract latent models.
What carries the argument
Hamiltonian World Models: a pipeline that encodes observations into a structured latent phase space, evolves the state via Hamiltonian-inspired dynamics incorporating control, dissipation, and residual terms, decodes the trajectory to observations, and uses the rollouts for planning.
If this is right
- Predictions become more interpretable because the latent evolution respects known physical structure rather than learning arbitrary mappings.
- Data efficiency improves as the Hamiltonian prior reduces the need for the model to discover conservation laws from data alone.
- Long-horizon stability increases because the dynamics are constrained to avoid the compounding errors common in free-running generative rollouts.
- Action controllability improves since control terms are explicitly part of the latent evolution and can be optimized during planning.
- Model-based reinforcement learning benefits from rollouts that remain consistent with physical constraints over extended horizons.
Where Pith is reading between the lines
- The framework could be tested on deformable objects by checking whether residual terms alone suffice or whether additional latent variables for deformation modes are required.
- Integration with real robot hardware might reveal whether the learned phase space implicitly captures non-holonomic constraints such as those arising from wheeled locomotion.
- The same encoding-decoding structure could be applied to autonomous driving by treating vehicle dynamics as the Hamiltonian core and traffic interactions as residual terms.
- A direct comparison of prediction error growth rates over 100-step horizons against JEPA-style and video diffusion baselines would quantify the claimed stability gains.
Load-bearing premise
Imposing Hamiltonian structure on a learned latent phase space will keep the dynamics stable and physically meaningful when the model faces real scenes that include friction, contact, non-conservative forces, and deformable objects.
What would settle it
Train the model on a robotic pushing or grasping task that includes measurable friction and contact; then check whether long-horizon rollouts conserve energy or produce trajectories that diverge from ground-truth physics in ways that standard video or latent predictors do not.
Figures
read the original abstract
World models have recently re-emerged as a central paradigm for embodied intelligence, robotics, autonomous driving, and model-based reinforcement learning. However, current world model research is often dominated by three partially separated routes: 2D video-generative models that emphasize visual future synthesis, 3D scene-centric models that emphasize spatial reconstruction, and JEPA-like latent models that emphasize abstract predictive representations. While each route has made important progress, they still struggle to provide physically reliable, action-controllable, and long-horizon stable predictions for embodied decision making. In this paper, we argue that the bottleneck of world models is no longer only whether they can generate realistic futures, but whether those futures are physically meaningful and useful for action. We propose \emph{Hamiltonian World Models} as a physically grounded perspective on world modeling. The key idea is to encode observations into a structured latent phase space, evolve the latent state through Hamiltonian-inspired dynamics with control, dissipation, and residual terms, decode the predicted trajectory into future observations, and use the resulting rollouts for planning. We discuss how Hamiltonian structure may improve interpretability, data efficiency, and long-horizon stability, while also noting practical challenges in real-world robotic scenes involving friction, contact, non-conservative forces, and deformable objects.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper argues that current world models for embodied intelligence, robotics, and model-based RL are limited in providing physically reliable, action-controllable, and long-horizon stable predictions. It proposes Hamiltonian World Models, which encode observations into a structured latent phase space, evolve the latent state via Hamiltonian-inspired dynamics augmented with control, dissipation, and residual terms, decode predicted trajectories into future observations, and apply the rollouts to planning. The authors discuss potential gains in interpretability, data efficiency, and stability while acknowledging practical challenges from friction, contact, non-conservative forces, and deformable objects.
Significance. If realized with concrete mechanisms, the proposal could provide a principled bridge between generative modeling and physical structure, offering a path toward more reliable long-horizon planning in robotics. The manuscript clearly articulates the motivation and high-level architecture, and it explicitly flags real-world difficulties rather than overclaiming. However, the absence of any formalization, implementation details, or validation means the significance is currently prospective rather than demonstrated.
major comments (2)
- [Abstract] Abstract and proposed framework: the central claim that Hamiltonian-inspired dynamics will yield physically meaningful and long-horizon stable predictions rests on the untested assertion that a learned latent phase space will acquire and preserve symplectic structure after the addition of dissipation and residual terms. No architectural constraint (e.g., explicit position-momentum split or symplectic integrator) or loss term is specified that would enforce this property.
- [Proposed model description] The manuscript supplies no equations defining the latent dynamics, the form of the Hamiltonian, or the residual terms, nor any training objective that would encourage conservation of quantities after non-Hamiltonian augmentations are introduced. Without these, it is impossible to evaluate whether the advertised benefits over standard latent ODEs can actually materialize.
minor comments (1)
- [Abstract] The abstract would be strengthened by a single sentence situating the proposal relative to existing Hamiltonian neural networks or symplectic integrators in the literature.
Simulated Author's Rebuttal
We thank the referee for the constructive and precise feedback. We appreciate the recognition that the manuscript clearly articulates the motivation and flags real-world challenges. We agree that the current version is primarily conceptual and lacks the formalization needed to evaluate the proposal rigorously; we will revise accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract and proposed framework: the central claim that Hamiltonian-inspired dynamics will yield physically meaningful and long-horizon stable predictions rests on the untested assertion that a learned latent phase space will acquire and preserve symplectic structure after the addition of dissipation and residual terms. No architectural constraint (e.g., explicit position-momentum split or symplectic integrator) or loss term is specified that would enforce this property.
Authors: We agree that the manuscript does not specify mechanisms to enforce symplectic structure once dissipation and residual terms are introduced, and that this leaves the central claim prospective rather than demonstrated. In the revised manuscript we will add a dedicated subsection on 'Enforcing Hamiltonian Structure' that proposes an explicit latent position-momentum split, a symplectic integrator for the base flow, and a regularization loss (e.g., penalizing deviation of the flow Jacobian determinant from unity or monitoring energy drift) to encourage preservation of the structure. These additions will be presented alongside an explicit discussion of their limitations when non-conservative forces are present. revision: yes
-
Referee: [Proposed model description] The manuscript supplies no equations defining the latent dynamics, the form of the Hamiltonian, or the residual terms, nor any training objective that would encourage conservation of quantities after non-Hamiltonian augmentations are introduced. Without these, it is impossible to evaluate whether the advertised benefits over standard latent ODEs can actually materialize.
Authors: We concur that the absence of explicit equations prevents direct evaluation. The manuscript is written as a perspective paper and therefore supplies only a descriptive overview. In the revision we will insert formal definitions: the latent state z = (q, p), the Hamiltonian H(q, p; θ), the controlled and augmented dynamics ż = J ∇H(z) + f_u(u) + f_diss(z) + f_res(z), and a composite training objective that combines reconstruction, multi-step prediction, and a Hamiltonian-regularization term (e.g., minimizing |dH/dt| along trajectories). These specifications will allow concrete comparison with latent ODE baselines and clarify the conditions under which the claimed advantages in stability and data efficiency may hold. revision: yes
Circularity Check
No significant circularity in the Hamiltonian World Models proposal
full rationale
The paper presents a constructive proposal for world models that encode observations into a latent phase space and evolve them using Hamiltonian-inspired dynamics augmented by control, dissipation, and residual terms before decoding to future observations. This architecture is defined directly as the method itself rather than deriving a specific prediction or result that reduces by construction to a fitted quantity or self-referential input. No equations, uniqueness theorems, or load-bearing claims in the abstract or description rely on self-citation chains or rename known patterns as novel derivations. The framework acknowledges real-world challenges like friction and non-conservative forces without claiming they are resolved tautologically by the Hamiltonian label. The derivation chain is therefore self-contained as an architectural suggestion.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Latent states can be interpreted as conjugate position-momentum pairs whose evolution follows Hamiltonian dynamics
invented entities (1)
-
Hamiltonian World Model
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Mahmoud Assran, Quentin Duval, Ishan Misra, Piotr Bojanowski, Pascal Vincent, Michael Rabbat, Yann LeCun, and Nicolas Ballas. Self-supervised learning from images with a joint-embedding predictive architecture.arXiv preprint arXiv:2301.08243,
-
[2]
URLhttps://arxiv.org/abs/2404.08471. Peter W. Battaglia, Razvan Pascanu, Matthew Lai, Danilo Jimenez Rezende, and Koray Kavukcuoglu. Interaction networks for learning about objects, relations and physics. InAdvances in Neural Information Processing Systems, volume 29,
work page internal anchor Pith review arXiv
-
[3]
URL https://arxiv.org/abs/2307.15818. Jake Bruce, Michael Dennis, Ashley Edwards, Jack Parker-Holder, Yuge Shi, Edward Hughes, Matthew Lai, Aditi Mavalankar, Richie Steigerwald, Chris Apps, Yusuf Aytar, Sarah Bechtle, Fer- yal Behbahani, Stephanie Chan, Nicolas Heess, Luis Gonzalez, Simon Osindero, Sherjil Ozair, Scott Reed, Jingwei Zhang, Konrad Zolna, J...
work page internal anchor Pith review arXiv
-
[4]
Lagrangian neural networks.arXiv:2003.04630,
Miles Cranmer, Sam Greydanus, Stephan Hoyer, Peter Battaglia, David Spergel, and Shirley Ho. Lagrangian neural networks.arXiv preprint arXiv:2003.04630,
-
[5]
Danny Driess, Fei Xia, Mehdi S. M. Sajjadi, Corey Lynch, Aakanksha Chowdhery, Brian Ichter, Ayzaan Wahid, Jonathan Tompson, Quan Vuong, Tianhe Yu, Wenlong Huang, Yevgen Chebotar, Pierre Sermanet, Daniel Duckworth, Sergey Levine, Vincent Vanhoucke, Karol Hausman, Marc Toussaint, Klaus Greff, Andy Zeng, Igor Mordatch, and Pete Florence. Palm-e: An embodied ...
work page internal anchor Pith review arXiv
-
[6]
Visual Foresight: Model-Based Deep Reinforcement Learning for Vision-Based Robotic Control
Frederik Ebert, Chelsea Finn, Sudeep Dasari, Annie Xie Xie, Alex Lee, and Sergey Levine. Visual foresight: Model-based deep reinforcement learning for vision-based robotic control. InarXiv preprint arXiv:1812.00568,
-
[7]
Mamba: Linear-Time Sequence Modeling with Selective State Spaces
Albert Gu and Tri Dao. Mamba: Linear-time sequence modeling with selective state spaces.arXiv preprint arXiv:2312.00752,
work page internal anchor Pith review arXiv
-
[8]
David Ha and J¨urgen Schmidhuber. World models.arXiv preprint arXiv:1803.10122,
work page internal anchor Pith review arXiv
-
[9]
Mastering Diverse Domains through World Models
Danijar Hafner, Jurgis Pasukonis, Jimmy Ba, and Timothy Lillicrap. Mastering diverse domains through world models.arXiv preprint arXiv:2301.04104,
work page internal anchor Pith review arXiv
-
[10]
URLhttps://arxiv.org/abs/2204.03458. Anthony Hu, Lloyd Russell, Hudson Yeo, Zak Murez, George Fedoseev, Alex Kendall, Jamie Shot- ton, and Gianluca Corrado. Gaia-1: A generative world model for autonomous driving.arXiv preprint arXiv:2309.17080,
work page internal anchor Pith review arXiv
-
[11]
OpenAI. Gpt-4 technical report.arXiv preprint arXiv:2303.08774,
work page internal anchor Pith review Pith/arXiv arXiv
-
[12]
URLhttps://arxiv. org/abs/1706.03762. Yaofeng Desmond Zhong, Biswadip Dey, and Amit Chakraborty. Symplectic ode-net: Learning hamiltonian dynamics with control. InInternational Conference on Learning Representations,
work page internal anchor Pith review Pith/arXiv arXiv
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.