Optimal and Scalable MAPF via Multi-Marginal Optimal Transport and Schr\"odinger Bridges
Pith reviewed 2026-05-12 03:48 UTC · model grok-4.3
The pith
MAPF on graphs reduces to a polynomial-sized linear program via Markovian multi-marginal optimal transport.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
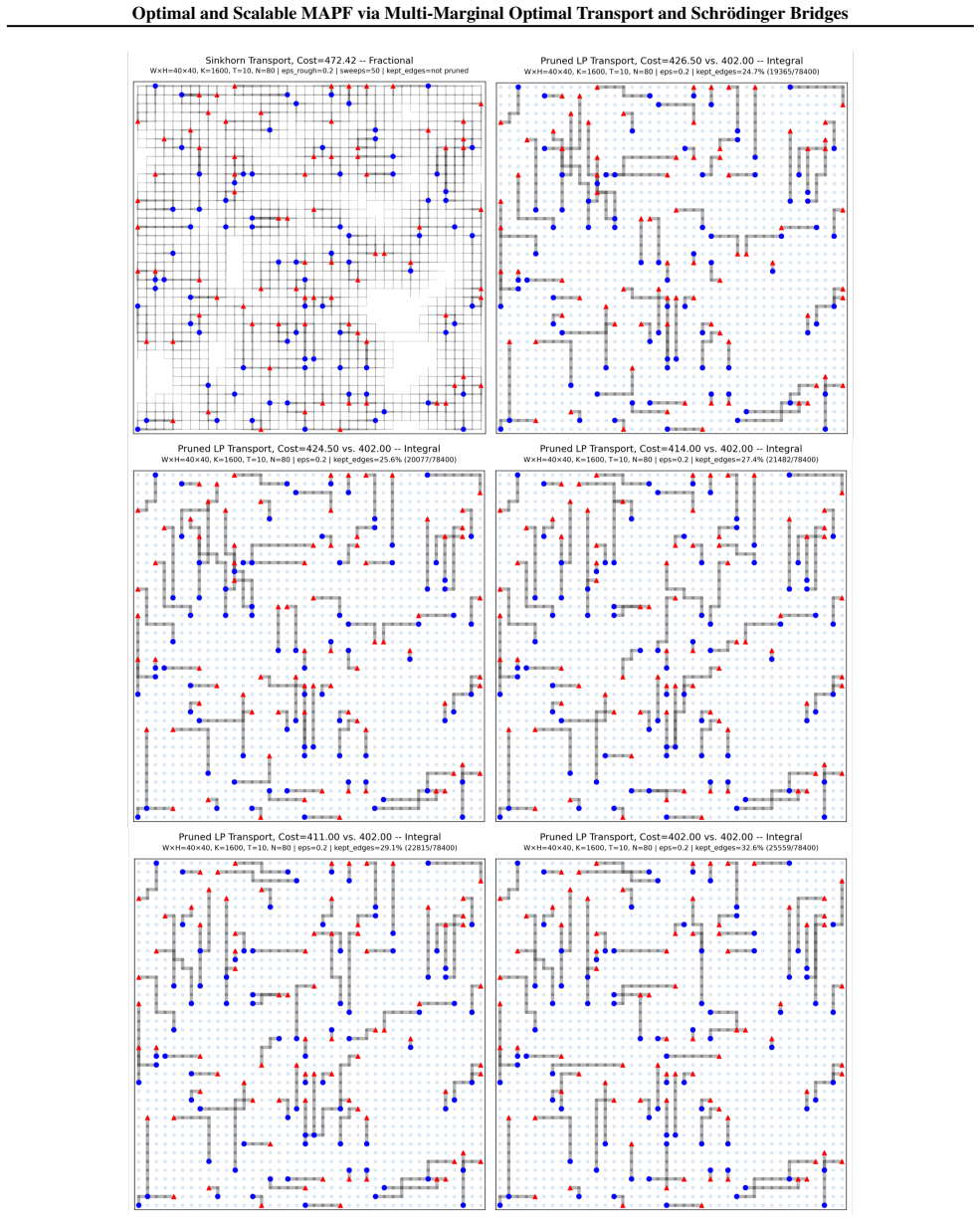
Anonymous MAPF is equivalent to a special Markovian MMOT on the graph, under which the joint transport plan over all agents reduces to a polynomial-sized LP. This LP is feasible and totally unimodular, producing minimum-cost integral {0,1} transports that never overlap in space or time. The Schrödinger-bridge relaxation further converts the problem to an entropic regularization of the MMOT that admits an iterative Sinkhorn-type algorithm; the resulting shadow fractional transport then serves as a template for a reduced LP that yields near-optimal integral solutions at substantially lower complexity.
What carries the argument
Markovian multi-marginal optimal transport (MMOT) on graphs, whose structure collapses the exponential joint plan to a polynomial linear program; the Schrödinger-bridge entropic regularization then supplies the scalable fractional template.
If this is right
- The resulting LP produces min-cost integral transports with no space-time overlaps.
- Schrödinger bridges yield an iterative Sinkhorn solution for the entropically regularized problem.
- The fractional shadow transport serves as a template that reduces the final LP size while preserving near-optimality.
- The overall approach scales to large graphs while retaining integral, collision-free solutions.
Where Pith is reading between the lines
- Existing optimal-transport libraries could be repurposed to solve MAPF instances without writing custom path-finding code.
- The Markovian reduction may extend to continuous-time or stochastic dynamics on the same graph by replacing the discrete transition matrix with the appropriate generator.
- Seeding the reduced LP with the bridge solution could be tested on graphs with obstacles or time-varying edge costs to measure how often optimality is retained.
Load-bearing premise
The graph dynamics are Markovian and the assignment is anonymous, so that the multi-marginal transport reduces to a totally unimodular linear program whose integral solutions avoid all space-time overlaps.
What would settle it
An explicit graph, set of agents, and targets satisfying the stated conditions for which the LP optimum is fractional or any integral solution produced by the reduced bridge template contains a space-time overlap.
Figures

















read the original abstract
We consider anonymous multi-agent path finding (MAPF) where a set of robots is tasked to travel to a set of targets on a finite, connected graph. We show that MAPF can be cast as a special class of multi-marginal optimal transport (MMOT) problems with an underlying Markovian structure, under which the exponentially large MMOT collapses to a linear program (LP) polynomial in size. Focusing on the anonymous setting, we establish conditions under which the corresponding LP is feasible, totally unimodular, and consequently, yields min-cost, integral $(\{0,1\})$ transports that do not overlap in both space and time. To adapt the approach to large-scale problems, we cast the MAPF-MMOT in a probabilistic framework via Schr\"odinger bridges. Under standard assumptions, we show that the Schr\"odinger bridge formulation reduces to an entropic regularization of the corresponding MMOT that admits an iterative Sinkhorn-type solution. The Schr\"odinger bridge, being a probabilistic framework, provides a shadow (fractional) transport that we use as a template to solve a reduced LP and demonstrate that it results in near-optimal, integral transports at a significant reduction in complexity. Extensive experiments highlight the optimality and scalability of the proposed approaches.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that anonymous multi-agent path finding (MAPF) on a finite connected graph can be cast as a Markovian multi-marginal optimal transport (MMOT) problem. Under this structure the exponentially large MMOT reduces to a polynomial-sized linear program (LP). For the anonymous setting the authors establish conditions under which the LP is feasible and totally unimodular, yielding min-cost integral {0,1} transports with no space-time overlaps. To scale to large instances they recast the problem via Schrödinger bridges, showing that the bridge reduces to entropic regularization of the MMOT solvable by Sinkhorn iterations; the resulting fractional transport serves as a support template for a reduced exact LP that produces near-optimal integral solutions. Experiments are reported to confirm both optimality and improved scalability.
Significance. If the claimed reductions, feasibility conditions, and total-unimodularity arguments hold, the work supplies a principled, polynomial-complexity route to exact optimal anonymous MAPF together with a practical near-optimal extension for large graphs. The explicit use of the Markovian factorization to collapse the MMOT and the subsequent Schrödinger-bridge reduction are genuine strengths; they connect optimal-transport theory to multi-agent planning in a way that could influence both theoretical analyses and deployed robotics systems.
minor comments (2)
- [Abstract] The abstract states that the LP is 'polynomial in size' and that the Schrödinger-bridge reduction holds 'under standard assumptions,' but does not name the precise scaling (e.g., O(T|E|)) or list the positivity/finite-cost conditions required for the entropic equivalence. The main text should make both explicit, ideally with a dedicated assumptions paragraph or theorem statement.
- The description of the reduced LP that uses the Schrödinger-bridge shadow transport as a template would benefit from a short complexity comparison (variables/constraints before and after reduction) and from pseudocode or a clear algorithmic outline.
Simulated Author's Rebuttal
We thank the referee for the positive and accurate summary of our work, as well as the recommendation for minor revision. The assessment correctly identifies the key contributions regarding the Markovian MMOT formulation for anonymous MAPF, the total unimodularity result, and the Schrödinger bridge scaling approach.
Circularity Check
No significant circularity identified
full rationale
The derivation begins by modeling anonymous MAPF as a Markov-structured MMOT on the time-expanded graph, where the joint transport plan factors explicitly into consecutive marginals due to the Markov property; this yields an LP whose variables and constraints scale linearly with the graph size, a direct consequence of flow conservation and the chosen factorization rather than any self-referential definition. Total unimodularity follows from the resulting constraint matrix being a network matrix (after standard vertex splitting for capacities), which is a known graph-theoretic fact independent of the paper. The Schrödinger-bridge step invokes the standard entropic-regularization equivalence under positivity and finite-cost assumptions on the reference measure, a result from prior optimal-transport literature that does not depend on the current MAPF instance or any fitted parameters. The shadow-transport template is used only heuristically to prune the exact LP, with no claim that the reduced solution equals the original by construction. No self-citation is load-bearing for the core claims, no ansatz is smuggled, and no quantity is fitted to data then renamed a prediction. The chain is therefore self-contained against external benchmarks in MMOT and network flows.
Axiom & Free-Parameter Ledger
axioms (3)
- domain assumption The environment is a finite, connected graph.
- domain assumption The multi-marginal transport possesses an underlying Markovian structure.
- domain assumption Standard assumptions hold for the Schrödinger-bridge formulation.
Reference graph
Works this paper leans on
-
[1]
arXiv preprint arXiv:2502.10607v1 , year =
Kaiwen Shi , title =. arXiv preprint arXiv:2502.10607v1 , year =
-
[2]
Artificial Intelligence , editor =
Roni Stern , title =. Artificial Intelligence , editor =
-
[3]
Jingjin Yu and Steven M. LaValle , title =. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) , year =
-
[4]
Saptarshi Bandyopadhyay and Soon-Jo Chung and Fred Y. Hadaegh , title =. Proceedings of the IEEE Conference on Control Applications (CCA) , year =
-
[5]
Proceedings of the 2018 IEEE Conference on Decision and Control (CDC) , year =
Vishaal Krishnan and Sonia Mart\'inez , title =. Proceedings of the 2018 IEEE Conference on Decision and Control (CDC) , year =
work page 2018
-
[6]
Le and Georgia Chalvatzaki and Armin Biess and Jan Peters , title =
An T. Le and Georgia Chalvatzaki and Armin Biess and Jan Peters , title =. Advances in Neural Information Processing Systems (NeurIPS) , year =
-
[7]
Christopher and Sven Koenig and Ferdinando Fioretto , title =
Jinhao Liang and Jacob K. Christopher and Sven Koenig and Ferdinando Fioretto , title =. arXiv preprint arXiv:2412.17993 , year =
-
[8]
Gilad Fine and Dor Atzmon and Noa Agmon , title =. Proceedings of the 22nd International Conference on Autonomous Agents and Multiagent Systems (AAMAS) , year =
-
[9]
Hang Ma and Sven Koenig , title =. Proceedings of the International Conference on Autonomous Agents and Multiagent Systems (AAMAS) , year =
-
[10]
Journal of Artificial Intelligence Research , year =
Xiao Peng and Olivier Simonin and Christine Solnon , title =. Journal of Artificial Intelligence Research , year =
-
[11]
Ali and Konstantin Yakovlev , title =
Zain A. Ali and Konstantin Yakovlev , title =. Proceedings of the AAAI Conference on Artificial Intelligence , year =
-
[12]
Bertozzi and Karthik Elamvazhuthi and Spring Berman , title =
Fangbo Zhang and Andrea L. Bertozzi and Karthik Elamvazhuthi and Spring Berman , title =. IEEE Transactions on Automatic Control , volume =
-
[13]
Proceedings of the 62nd IEEE Conference on Decision and Control (CDC) , year =
Max Emerick and Bassam Bamieh , title =. Proceedings of the 62nd IEEE Conference on Decision and Control (CDC) , year =
-
[14]
Proceedings of the 2018 IEEE Conference on Decision and Control (CDC) , year =
Mathias Hudoba de Badyn and Utku Eren and Behçet Açikmeşe and Mehran Mesbahi , title =. Proceedings of the 2018 IEEE Conference on Decision and Control (CDC) , year =
work page 2018
-
[15]
Journal of Scientific Computing , volume =
Christina Frederick and Magnus Egerstedt and Haomin Zhou , title =. Journal of Scientific Computing , volume =
-
[16]
Kachar, Koray G. and Gorodetsky, Alex A. , journal=. Dynamic Multiagent Assignment Via Discrete Optimal Transport , year=
-
[17]
Cédric Villani , title =
-
[18]
Optimal Transport on Quantum Structures
Alessio Figalli , title =. Lecture Notes from the School "Optimal Transport on Quantum Structures" , year =
-
[19]
Foundations and Trends in Machine Learning , year =
Gabriel Peyré and Marco Cuturi , title =. Foundations and Trends in Machine Learning , year =
- [20]
-
[21]
Veinott, A. F., Jr. and Dantzig, George B. , title =. SIAM Review , volume =. 1968 , publisher =
work page 1968
-
[22]
Proceedings of the AAAI Conference on Artificial Intelligence , volume =
Zain Alabedeen Ali and Konstantin Yakovlev , title =. Proceedings of the AAAI Conference on Artificial Intelligence , volume =
-
[23]
Michal C. Complete Decentralized Method for On-Line Multi-Robot Trajectory Planning in Well-formed Infrastructures , booktitle =. 2015 , pages =
work page 2015
-
[24]
Advances in Neural Information Processing Systems 33 (NeurIPS 2020) , year=
Partial Optimal Transport with Applications on Positive-Unlabeled Learning , author=. Advances in Neural Information Processing Systems 33 (NeurIPS 2020) , year=
work page 2020
-
[25]
Mathematics of Computation , volume =
Lenaïc Chizat and Gabriel Peyré and Bernhard Schmitzer and François-Xavier Vialard , title =. Mathematics of Computation , volume =
-
[26]
Carlos E. García and David M. Prett and Manfred Morari , title =. Automatica , volume =. 1989 , publisher =
work page 1989
- [27]
-
[28]
Mouhacine Benosman , title =
- [29]
-
[30]
Anna Davydova and Kyle Auger and Antonio Puzzi , title =. 2019 , note =
work page 2019
-
[31]
Learning Generative Models with
Genevay, Aude and Peyré, Gabriel and Cuturi, Marco , booktitle=. Learning Generative Models with. 2018 , organization=
work page 2018
-
[32]
IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=
Optimal Transport for Domain Adaptation , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=. 2017 , publisher=
work page 2017
-
[33]
Proceedings of the 29th International Conference on Machine Learning (ICML) , pages=
On Causal and Anticausal Learning , author=. Proceedings of the 29th International Conference on Machine Learning (ICML) , pages=
-
[34]
Learning latent permutations with
Mena, Gonzalo and Belanger, David and Linderman, Scott and Snoek, Jasper , booktitle=. Learning latent permutations with
-
[35]
International Conference on Artificial Intelligence and Statistics (AISTATS) , pages=
Semi-supervised optimal transport using domain adaptation with regularized couplings , author=. International Conference on Artificial Intelligence and Statistics (AISTATS) , pages=
-
[36]
Proceedings of the 5th Conference on Robot Learning (CoRL) , year=
The Earth Mover’s Planning Problem , author=. Proceedings of the 5th Conference on Robot Learning (CoRL) , year=
-
[37]
Scalable Optimal Transport Methods in Machine Learning:
Khamis, Abdelwahed and Tsuchida, Russell and Tarek, Mohamed and Rolland, Vivien and Petersson, Lars , journal=. Scalable Optimal Transport Methods in Machine Learning:. 2024 , publisher=
work page 2024
- [38]
-
[39]
Scetbon, Meyer and Cuturi, Marco , journal=. Low-rank Optimal Transport:
- [40]
-
[41]
Journal of Machine Learning Research , year =
R. Journal of Machine Learning Research , year =
-
[42]
and Benosman, Mouhacine and Liu, Wenliang and Pecora, Federico and Durham, Joseph W
Khan, Usman A. and Benosman, Mouhacine and Liu, Wenliang and Pecora, Federico and Durham, Joseph W. , journal =. Multi-robot Path Planning and Scheduling via Model Predictive Optimal Transport (. 2025 , month =
work page 2025
-
[43]
Mathematics of Operations Research , volume =
Scalable computation of dynamic flow problems via multi-marginal graph-structured optimal transport , author =. Mathematics of Operations Research , volume =
-
[44]
ESAIM: Mathematical Modelling and Numerical Analysis , volume =
Pass, Brendan , title =. ESAIM: Mathematical Modelling and Numerical Analysis , volume =
- [45]
-
[46]
Christian L. A Survey of the. Discrete and Continuous Dynamical Systems , volume =
-
[47]
Random fields and diffusion processes , author=
-
[48]
Journal of Mathematical Physics , volume =
Michele Pavon and Francesco Ticozzi , title =. Journal of Mathematical Physics , volume =. 2010 , publisher =
work page 2010
-
[49]
Georgiou and Michele Pavon , title =
Tryphon T. Georgiou and Michele Pavon , title =. Journal of Mathematical Physics , volume =. 2015 , publisher =
work page 2015
- [50]
-
[51]
S. Sinkhorn Divergences for. Advances in Neural Information Processing Systems , volume=
-
[52]
Über die Umkehrung der Naturgesetze , author=. Sitzungsberichte der Preussischen Akademie der Wissenschaften, Physikalisch-mathematische Klasse , pages=
-
[53]
Daniel Kornhauser and Gary L. Miller and Paul G. Spirakis , title =. Proceedings of the 25th Annual Symposium on Foundations of Computer Science , year =
-
[54]
Lester R. Ford. and Delbert R. Fulkerson , title =. 1962 , address =
work page 1962
-
[55]
Ravindra K. Ahuja and Thomas L. Magnanti and James B. Orlin , title =. 1993 , address =
work page 1993
-
[56]
Proceedings of the Twenty-Fourth AAAI Conference on Artificial Intelligence (AAAI) , year =
Trevor Standley , title =. Proceedings of the Twenty-Fourth AAAI Conference on Artificial Intelligence (AAAI) , year =
- [57]
- [58]
-
[59]
SIAM Journal on Scientific Computing , volume =
Bernhard Schmitzer , title =. SIAM Journal on Scientific Computing , volume =
-
[60]
SIAM Journal on Control and Optimization , volume =
Haasler, Isabel and Ringh, Axel and Chen, Yongxin and Karlsson, Johan , title =. SIAM Journal on Control and Optimization , volume =
- [61]
-
[62]
An Optimal Transport Approach for the
Di Marino, Simone and Gerolin, Augusto , journal =. An Optimal Transport Approach for the
-
[63]
and Pavon, Michele , journal =
Chen, Yongxin and Georgiou, Tryphon T. and Pavon, Michele , journal =. Stochastic Control Liaisons:
-
[64]
On the Linear Convergence of the Multimarginal
Carlier, Guillaume , journal =. On the Linear Convergence of the Multimarginal
-
[65]
and Pavon, Michele , journal =
Chen, Yongxin and Georgiou, Tryphon T. and Pavon, Michele , journal =. On the relation between optimal transport and
-
[66]
IEEE Transactions on Automatic Control , volume =
Robust transport over networks , author =. IEEE Transactions on Automatic Control , volume =
-
[67]
Artificial Intelligence , volume =
Conflict-based Search for Optimal Multi-Agent Pathfinding , author =. Artificial Intelligence , volume =
-
[68]
and Wagner, Glenn and Surynek, Pavel , booktitle =
Felner, Ariel and Stern, Roni and Shimony, Solomon Eyal and Boyarski, Eli and Goldenberg, Meir and Sharon, Guni and Sturtevant, Nathan R. and Wagner, Glenn and Surynek, Pavel , booktitle =. Search-Based Optimal Solvers for the Multi-Agent Pathfinding Problem:
-
[69]
Reduced Time-Expansion Graphs and Goal Decomposition for Solving Cooperative Path Finding Sub-Optimally , author =. Proceedings of the Twenty-Fourth International Joint Conference on Artificial Intelligence (IJCAI) , pages =
-
[70]
Random Fields and Diffusion Processes , journal =
F. Random Fields and Diffusion Processes , journal =. 1988 , publisher =
work page 1988
-
[71]
On the Convexity of the Entropy Along Entropic Interpolations , booktitle =
L. On the Convexity of the Entropy Along Entropic Interpolations , booktitle =. 2017 , pages =
work page 2017
- [72]
-
[73]
Potra, Florian A. and Wright, Stephen J. , title =. Journal of Computational and Applied Mathematics , volume =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.