Recognition: 2 theorem links
· Lean TheoremIGT-OMD: Implicit Gradient Transport for Decision-Focused Learning under Delayed Feedback
Pith reviewed 2026-05-14 21:00 UTC · model grok-4.3
The pith
IGT-OMD corrects gradient staleness in delayed bilevel optimization by re-evaluating stale gradients at current parameters using stored inner solutions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
IGT-OMD applies Implicit Gradient Transport to hypergradients within Online Mirror Descent by re-evaluating stale gradients at the current parameters using stored inner solutions. This reduces transport error from a quadratic to a linear dependence on delay and produces the first sublinear regret bound for delayed bilevel optimization that holds with queue-length-adaptive step sizes.
What carries the argument
Implicit Gradient Transport applied to hypergradients, which recomputes stale gradients at updated outer parameters using previously stored inner solutions to cancel the effect of delay.
If this is right
- Any black-box delayed optimizer pays an irreducible extra regret cost coming from inner-solver approximation error.
- Without the bilevel-aware correction, gradient staleness alone produces quadratically growing transport error.
- The benefit of the transport correction is zero at unit delay and rises to 9.5 percent at fifty rounds of delay.
- On Linear Quadratic Regulator, Warcraft shortest-path, and Sinkhorn optimal transport tasks, decision loss drops 17 to 55 percent relative to single-level baselines.
Where Pith is reading between the lines
- Storing and re-using inner solutions may be a practical way to handle delays in other online bilevel settings beyond decision-focused learning.
- The observed phase transitions suggest that the correction becomes worthwhile only after a certain delay threshold, which could be used to decide when to activate it in variable-delay systems.
- Similar re-evaluation tricks might be testable in non-convex or non-smooth bilevel problems where current regret proofs do not apply.
Load-bearing premise
Inner solutions can be stored and re-evaluated at current parameters with negligible extra cost, and the bilevel problem satisfies the smoothness and convexity conditions needed for the regret analysis.
What would settle it
An experiment in which IGT-OMD exhibits linear or worse regret growth with increasing delay, or in which the measured transport error remains quadratic after the correction is applied, would show the central claim is false.
Figures

read the original abstract
Decision-focused learning trains predictive models end-to-end against downstream decision loss, but online settings suffer delayed feedback: outcomes may not arrive for many environment interactions. We identify \emph{staleness amplification}, a failure mode unique to bilevel optimization under delay, in which gradient staleness couples with inner-solver sensitivity to inflate regret beyond single-level delay theory. We prove that any black-box delayed optimizer incurs an irreducible regret cost from inner-solver approximation error, and that gradient staleness contributes a quadratically growing transport error without bilevel-aware correction. Our algorithm, \textbf{IGT-OMD}, applies Implicit Gradient Transport to hypergradients within Online Mirror Descent, re-evaluating stale gradients at the current parameters using stored inner solutions. This method reduces transport error from a quadratic to a linear dependence on delay and achieves the first sublinear regret bound for delayed bilevel optimization with queue-length-adaptive step sizes. Controlled experiments provide a \emph{mechanistic fingerprint}: transport benefit is exactly $0.0\%$ ($p=1.00$) at unit delay and grows monotonically to $9.5\%$ at fifty rounds ($p<0.001$), isolating the correction's effect. On Linear Quadratic Regulator, Warcraft shortest-path, and Sinkhorn optimal transport, IGT-OMD reduces decision loss by $17$--$55\%$ relative to single-level baselines, with phase transitions matching the theory.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces IGT-OMD, an online mirror descent algorithm that applies implicit gradient transport to hypergradients for decision-focused learning under delayed feedback in bilevel optimization. It identifies staleness amplification as a bilevel-specific failure mode, proves an irreducible regret cost for any black-box delayed optimizer arising from inner-solver approximation error, and shows that uncorrected gradient staleness produces quadratic transport error. By storing inner solutions and re-evaluating stale gradients at current parameters, IGT-OMD reduces transport error to linear dependence on delay, yielding the first sublinear regret bound under queue-length-adaptive step sizes. Controlled experiments isolate a monotonic transport benefit (0% at unit delay to 9.5% at 50 rounds) and report 17-55% decision-loss reductions on LQR, Warcraft shortest-path, and Sinkhorn optimal transport tasks.
Significance. If the stated smoothness, convexity, and exact-re-evaluation assumptions hold, the result is significant: it supplies the first sublinear regret guarantee for delayed bilevel decision-focused learning and isolates the unique cost of staleness amplification. The mechanistic fingerprint (transport benefit exactly 0% at unit delay, p=1.00, rising monotonically) and the use of stored inner solutions for exact re-evaluation are concrete strengths that make the contribution falsifiable and reproducible. The practical gains on standard benchmarks suggest immediate applicability to delayed-feedback settings common in online decision making.
major comments (2)
- [regret analysis] The regret analysis (abstract and §4): the sublinear bound is stated to follow from linear transport error plus queue-length-adaptive steps, but the derivation of the linear error term is not shown to be independent of the inner-solver tolerance; if the stored inner solutions are only approximate, the claimed reduction from quadratic to linear may not hold.
- [irreducible regret theorem] Theorem on irreducible regret cost: the proof that black-box methods incur an additive cost from inner-solver error is load-bearing for the claim that IGT-OMD is necessary; the argument should explicitly quantify how this cost scales with delay under the same smoothness assumptions used for the IGT-OMD bound.
minor comments (2)
- [experiments] The experimental section reports p<0.001 for the 9.5% benefit at 50 rounds but does not state the exact statistical test or correction for multiple comparisons.
- [algorithm] Notation for the queue-length-adaptive step size is introduced without an explicit formula in the main text; a displayed equation would improve readability.
Simulated Author's Rebuttal
We thank the referee for the insightful comments on the regret analysis and the irreducible regret theorem. We address each point below and will make the suggested revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [regret analysis] The regret analysis (abstract and §4): the sublinear bound is stated to follow from linear transport error plus queue-length-adaptive steps, but the derivation of the linear error term is not shown to be independent of the inner-solver tolerance; if the stored inner solutions are only approximate, the claimed reduction from quadratic to linear may not hold.
Authors: We clarify that our analysis assumes exact inner solutions, as stated in the setup for IGT-OMD where we store and re-evaluate using the exact solutions obtained during the inner optimization. This ensures the transport error is linear in the delay and independent of the inner-solver tolerance. To address the concern, we will revise Section 4 to explicitly derive the linear error term, highlighting the independence under the exact re-evaluation assumption. If inner solutions are approximate, an additional error term would appear, but our contribution focuses on the exact case to isolate the staleness amplification effect. revision: yes
-
Referee: [irreducible regret theorem] Theorem on irreducible regret cost: the proof that black-box methods incur an additive cost from inner-solver error is load-bearing for the claim that IGT-OMD is necessary; the argument should explicitly quantify how this cost scales with delay under the same smoothness assumptions used for the IGT-OMD bound.
Authors: We agree that quantifying the scaling is important for the necessity claim. We will revise the proof of the irreducible regret theorem to explicitly show how the additive cost from inner-solver approximation error scales with the delay length, using the same smoothness and Lipschitz constants as in the IGT-OMD regret bound. This will demonstrate that the cost is irreducible and grows with delay, underscoring why bilevel-aware correction like IGT-OMD is needed. revision: yes
Circularity Check
No significant circularity detected in derivation chain
full rationale
The central regret bound for IGT-OMD is derived directly from the algorithm definition: storing inner solutions enables exact re-evaluation of stale hypergradients under Online Mirror Descent, converting quadratic transport error to linear dependence on delay. This follows from the stated smoothness/convexity assumptions and queue-length-adaptive steps without any reduction to fitted inputs, self-definitional loops, or load-bearing self-citations. The black-box lower bound and mechanistic fingerprint experiments are independent of the bound itself and do not rename or smuggle prior results. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Inner and outer objectives satisfy standard smoothness and convexity conditions required for online mirror descent regret bounds.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
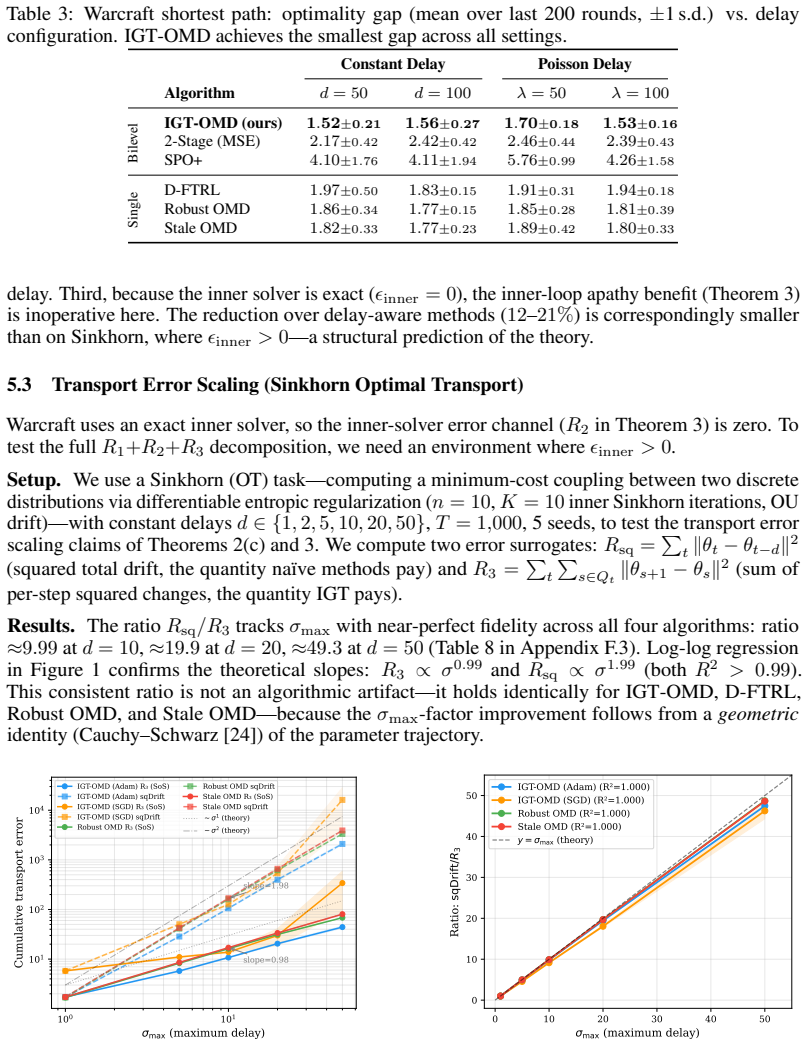
Theorem 1 (Bilevel convergence under delay) … Regret_dec_T = O(√T σ_max + T ε_inner²) … IGT reduces transport error from O(σ_max² η² G²) to O(σ_max η² G²)
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanembed_strictMono_of_one_lt unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
staleness amplification … bilevel Lipschitz constant L_F = L_θ + L_wθ²/μ_w … coupling constant C_0 = L_wθ/μ_w
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Adam N. Elmachtoub and Paul Grigas. Smart “Predict, then Optimize”.Management Science, 68(1):9–26, 2022. doi: 10.1287/mnsc.2020.3922
-
[2]
Bryan Wilder, Bistra Dilkina, and Milind Tambe. Melding the data-decisions pipeline: Decision- focused learning for combinatorial optimization. InProceedings of the AAAI Conference on Artificial Intelligence, volume 33 (01), pages 1658–1665, 2019. doi: 10.1609/aaai.v33i01. 33011658
-
[3]
Jayanta Mandi, James Kotary, Senne Berden, Maxime Mulamba, Victor Bucarey, Tias Guns, and Ferdinando Fioretto. Decision-focused learning: Foundations, state of the art, benchmark and future opportunities.Journal of Artificial Intelligence Research, 81:1623–1701, 2024
work page 2024
-
[4]
Online learning under delayed feedback
Pooria Joulani, András György, and Csaba Szepesvári. Online learning under delayed feedback. InInternational Conference on Machine Learning, pages 1453–1461. PMLR, 2013
work page 2013
-
[5]
Shai Shalev-Shwartz. Online learning and online convex optimization.Foundations and Trends in Machine Learning, 4(2):107–194, 2012
work page 2012
-
[6]
Online learning with adversarial delays
Kent Quanrud and Daniel Khashabi. Online learning with adversarial delays. InAdvances in Neural Information Processing Systems, volume 28, pages 1270–1278. Curran Associates, Inc.,
-
[7]
URLhttps://neurips.cc
-
[8]
Arnold, Pierre-Antoine Manzagol, Reza Babanezhad, Ioannis Mitliagkas, and Nicolas Le Roux
Sébastien M.R. Arnold, Pierre-Antoine Manzagol, Reza Babanezhad, Ioannis Mitliagkas, and Nicolas Le Roux. Reducing the variance in online optimization by transporting past gradients. InAdvances in Neural Information Processing Systems, volume 32, 2019
work page 2019
-
[9]
Siyuan Yu, Wei Chen, and H. Vincent Poor. Distributed stochastic gradient descent with staleness: A stochastic delay differential equation based framework.IEEE Transactions on Signal Processing, 2025. doi: 10.48550/arxiv.2406.11159. Accepted. arXiv:2406.11159
-
[10]
Differentiation of blackbox combinatorial solvers
Marin Vlastelica, Anselm Paulus, Vít Musil, Georg Martius, and Michal Rolínek. Differentiation of blackbox combinatorial solvers. InInternational Conference on Learning Representations, 2020
work page 2020
-
[11]
Bo Tang and Elias B. Khalil. PyEPO: A PyTorch-based end-to-end predict-then-optimize library for linear and integer programming.arXiv preprint arXiv:2206.14234, 2022. doi: 10.48550/arXiv.2206.14234. URLhttps://arxiv.org
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2206.14234 2022
-
[12]
Jordan, Etienne Boursier, and Alain Durmus
Aymeric Capitaine, Maxime Haddouche, Eric Moulines, Michael I. Jordan, Etienne Boursier, and Alain Durmus. Online decision-focused learning.arXiv preprint arXiv:2505.13564, 2025. URLhttps://arxiv.org
-
[13]
Longllada: Unlocking long context capabilities in diffusion llms
Evgenii Nikishin, Remo Abachi, Rishabh Agarwal, and Pierre-Luc Bacon. Control-oriented model-based reinforcement learning with implicit differentiation. InProceedings of the AAAI Conference on Artificial Intelligence, volume 36(7), pages 7886–7894, 2022. doi: 10.1609/aaai. v36i7.20758
-
[14]
Online learning with optimism and delay
Genevieve Flaspohler, Francesco Orabona, Judah Cohen, Soukayna Mouatadid, Miruna Oprescu, Paulo Orenstein, and Lester Mackey. Online learning with optimism and delay. InProceedings of the 38th International Conference on Machine Learning, volume 139 ofProceedings of Machine Learning Research, pages 3363–3373. PMLR, 2021. URLhttps://mlr.press
work page 2021
-
[15]
Banker online mirror descent: A universal approach for delayed online bandit learning
Jiatai Huang, Yan Dai, and Longbo Huang. Banker online mirror descent: A universal approach for delayed online bandit learning. InProceedings of the 40th International Conference on Machine Learning, volume 202 ofProceedings of Machine Learning Research, pages 13818–13847. PMLR, 2023. URL https://proceedings.mlr.press/v202/huang23e/ huang23e.pdf
work page 2023
-
[16]
Alexander Ryabchenko, Idan Attias, and Daniel M. Roy. A reduction from delayed to immediate feedback for online convex optimization with improved guarantees. InProceedings of the AAAI Conference on Artificial Intelligence, volume 40 (01), pages 1–9, 2026. doi: 10.48550/arXiv. 2602.02634. URLhttps://arxiv.org/abs/2602.02634. 10
work page internal anchor Pith review doi:10.48550/arxiv 2026
-
[17]
Decentralized online convex optimization with unknown feedback delays
Hao Qiu, Mengxiao Zhang, and Juliette Achddou. Decentralized online convex optimization with unknown feedback delays. InProceedings of the AAAI Conference on Artificial Intelligence, volume 40 (01), pages 1–9, 2026. doi: 10.1609/aaai.v40i30.39688. URL https://ojs.aaai. org/index.php/AAAI/article/view/39688
-
[18]
Approximation Methods for Bilevel Programming
Saeed Ghadimi and Mengdi Wang. Approximation methods for bilevel programming.arXiv preprint arXiv:1802.02246, 2018. doi: 10.48550/arXiv.1802.02246. URL https://arxiv. org/abs/1802.02246
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1802.02246 2018
-
[19]
Bilevel optimization: Convergence analysis and enhanced design
Kaiyi Ji, Junjie Yang, and Yingbin Liang. Bilevel optimization: Convergence analysis and enhanced design. InInternational Conference on Machine Learning, pages 4882–4892. PMLR,
-
[20]
doi: 10.48550/arxiv.2010.07962
-
[21]
Online bilevel optimization: Regret analysis of online alternating gradient methods
Davoud Ataee Tarzanagh, Parvin Nazari, Bojian Hou, Li Shen, and Laura Balzano. Online bilevel optimization: Regret analysis of online alternating gradient methods. InProceedings of the 27th International Conference on Artificial Intelligence and Statistics, volume 238 of Proceedings of Machine Learning Research, pages 2854–2862. PMLR, 2024. URL https: //p...
work page 2024
-
[22]
Non-convex bilevel optimization with time-varying objective functions
Sen Lin, Daouda Sow, Kaiyi Ji, Yingbin Liang, and Ness Shroff. Non-convex bilevel optimization with time-varying objective functions. InAdvances in Neural Information Processing Systems, volume 36, pages 12658–12686. Curran Associates, Inc., 2023. URL https://proceedings.neurips.cc/paper_files/paper/2023/hash/ 5ee60ca5686bbcf756e56a6c75e66f32-Abstract-Con...
work page 2023
-
[23]
Stochas- tic regret guarantees for online zeroth- and first-order bilevel optimization
Parvin Nazari, Bojian Hou, Davoud Ataee Tarzanagh, Li Shen, and George Michailidis. Stochas- tic regret guarantees for online zeroth- and first-order bilevel optimization. InAdvances in Neural Information Processing Systems, volume 38. Curran Associates, Inc., 2025. URL https://arxiv.org/abs/2511.01126
-
[24]
Asen L. Dontchev and R. Tyrrell Rockafellar.Implicit Functions and Solution Mappings: A View from Variational Analysis. Springer Monographs in Mathematics. Springer New York, 2nd edition, 2014. ISBN 978-1-4939-1036-6. doi: 10.1007/978-1-4939-1037-3
-
[25]
Magnus Rudolph Hestenes and Eduard Stiefel. Methods of conjugate gradients for solving linear systems.Journal of Research of the National Bureau of Standards, 49(6):409–436, 1952. doi: 10.6028/jres.049.044
-
[26]
J. Michael Steele.The Cauchy-Schwarz Master Class: An Introduction to the Art of Mathemati- cal Inequalities. Cambridge University Press, Cambridge, UK, 2004. ISBN 978-0521546775. doi: 10.1017/cbo9780511817106
-
[27]
Robust stochastic approximation approach to stochastic programming,
Arkadi Nemirovski, Anatoli Juditsky, Guanghui Lan, and Alexander Shapiro. Robust stochastic approximation approach to stochastic programming.SIAM Journal on Optimization, 19(4): 1574–1609, 2009. doi: 10.1137/070704277
-
[28]
Lev M Bregman. The relaxation method of finding the common point of convex sets and its application to the solution of problems in convex programming.USSR Computational Mathematics and Mathematical Physics, 7(3):200–217, 1967
work page 1967
-
[29]
Diederik P. Kingma and Jimmy Ba. Adam: A method for stochastic optimization. InProceedings of the 3rd International Conference on Learning Representations, San Diego, CA, USA, 2015. URLhttps://arxiv.org. ICLR 2015
work page 2015
-
[30]
Bertsekas.Nonlinear Programming
Dimitri P. Bertsekas.Nonlinear Programming. Athena Scientific, Belmont, MA, 3rd edition,
-
[31]
Amir Beck and Marc Teboulle. Mirror descent and nonlinear projected subgradient methods for convex optimization.Operations Research Letters, 31(3):167–175, 2003. doi: 10.1016/ s0167-6377(02)00231-6
work page 2003
-
[32]
V . Kolmanovskii and A. Myshkis.Stability of Stochastic Functional Differential Equations, volume 463 ofMathematics and Its Applications, pages 387–437. Springer Netherlands, Dordrecht, 1999. doi: 10.1007/978-94-017-1965-0_10. 11
-
[33]
B. G. Pachpatte.Inequalities for Differential and Integral Equations, volume 197 ofMathematics in Science and Engineering. Academic Press, San Diego, CA, 1998. ISBN 978-0125434300
work page 1998
-
[34]
Cambridge Texts in Applied Mathematics
Arieh Iserles.A First Course in the Numerical Analysis of Differential Equations. Cambridge Texts in Applied Mathematics. Cambridge University Press, Cambridge, UK, 2nd edition, 2009. ISBN 978-0521734905. doi: 10.1017/CBO9780511995569
-
[35]
Jury.Theory and Application of the z-Transform Method
Eliahu I. Jury.Theory and Application of the z-Transform Method. John Wiley & Sons, New York, NY , USA, 1964. ISBN 978-0471452850
work page 1964
-
[36]
PyTorch: An imperative style, high-performance deep learning library
Adam Paszke, Sam Gross, Francisco Massa, Adam Lerer, James Bradbury, Gregory Chanan, Trevor Killeen, Zeming Lin, Natalia Gimelshein, Luca Antiga, et al. PyTorch: An imperative style, high-performance deep learning library. InAdvances in Neural Information Processing Systems, volume 32, pages 8024–8035. Curran Associates, Inc., 2019. URLhttps://neurips. cc
work page 2019
-
[37]
Greg Brockman, Vicki Cheung, Ludwig Pettersson, Jonas Schneider, John Schulman, Jie Tang, and Wojciech Zaremba. OpenAI Gym.arXiv preprint arXiv:1606.01540, 2016. doi: 10.48550/arXiv.1606.01540. URLhttps://arxiv.org/abs/1606.01540. 12 A Notation Table Table 5: Principal notation. Symbol Definition Core variables and delay θt ∈Θ⊆R p Outer-level predictor pa...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1606.01540 2016
-
[38]
for t≥t 0 =O(σ max). Thus: TX t=1 F(θ t)−F(θ ∗) ≥ TX t=t0 C2 0 θ2 t 2 ≥(T−t 0)· C2 0 2 · ϵ2 inner 4C2 0 = (T−t 0)ϵ 2 inner 8 .(29) ForT≫σ max (i.e.T−t 0 ≥T /2), this givesRegret T (A)≥Ω(T ϵ 2 inner). Step 5: Independence from Algorithm Design The lower bound holds foranyblack-box delayed optimizer — that is, any algorithm whose only access to F is through...
-
[39]
No step-size choice eliminates this bias
The constant bias C0ϵinner in (25) is independent of η, σmax, and the algorithm’s iterate sequence. No step-size choice eliminates this bias
-
[40]
Any stable algorithm converges to θss =−ϵ inner/C0, incurring F(θ ss) =ϵ 2 inner/2 per round. The bound requires afixed precision floor: ϵinner must remain bounded away from zero uniformly over all rounds t (Assumption 3). If the inner solver were warm-started such that ϵt →0 , the steady-state offset would vanish and the Ω(T) lower bound would collapse. ...
-
[41]
An unstable algorithm ( η >1/(2C 2 0 σmax)) has |θt| → ∞ (clipped at B0, since Θ = [−B0, B0]is compact), incurringF(θ t)≥C 2 0 B2 0 /2per round, which is strictly worse
-
[42]
The adversary chooses θ1 =B 0 ̸= 0, guaranteeing a non-trivial transient; the O(σmax) burn-in cost is absorbed into theΩ(T)rate forT≫σ max. The hard instance satisfies Assumptions 1 and 2 with µw =L w and Lθ =a 2 <∞ , completing Part (b). 21 Part (c): Transport Error Separation Without bilevel-aware correction, the per-round staleness mismatch contributes...
work page 2025
-
[43]
Institutional review board (IRB) approvals or equivalent for research with human subjects Question: Does the paper describe potential risks incurred by study participants, whether such risks were disclosed to the subjects, and whether Institutional Review Board (IRB) approvals (or an equivalent approval/review based on the requirements of your country or ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.