Recognition: unknown
The Unified Autonomy Stack: Toward a Blueprint for Generalizable Robot Autonomy
Pith reviewed 2026-05-14 19:38 UTC · model grok-4.3
The pith
The Unified Autonomy Stack delivers resilient autonomy for diverse aerial and ground robots via integrated perception, planning, and navigation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
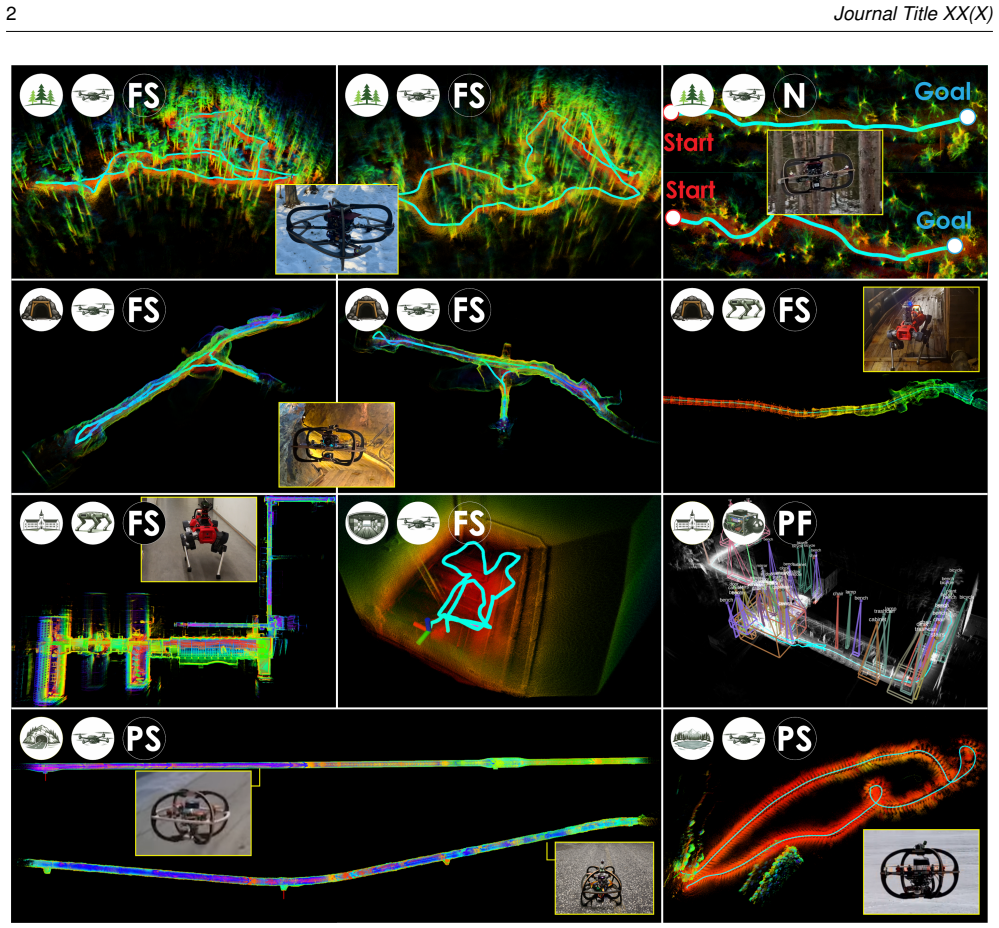
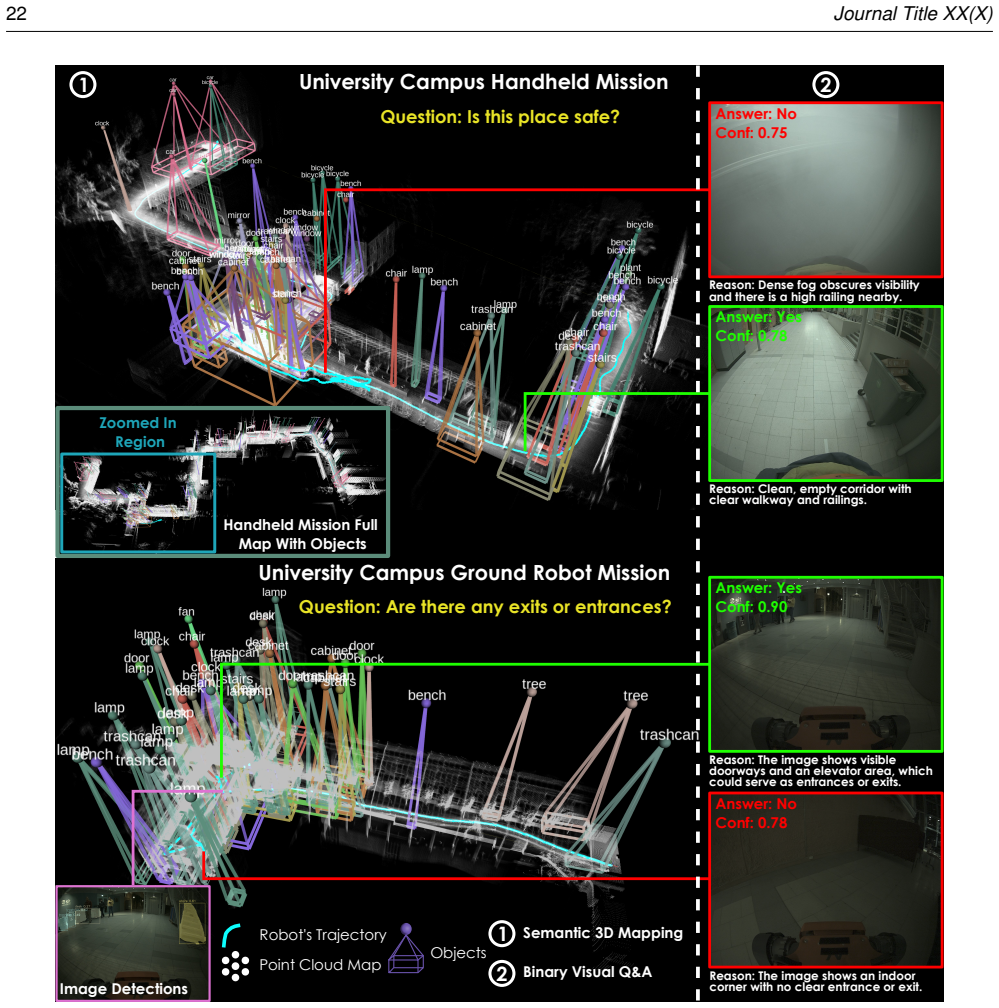
The Unified Autonomy Stack is a system-level solution centered on three synergistic modules: multi-modal perception for robust localization and semantic understanding through sensor fusion, multi-behavior planning using sampling-based techniques, and multi-layered safe navigation combining map-based planning with learning-driven policies and safety filters. This architecture enables behaviors like safe GNSS-denied navigation in unknown environments, complex exploration, object discovery, and efficient inspection, as demonstrated in field tests on rotorcraft and legged robots in self-similar, smoke-filled, and high-clutter settings.
What carries the argument
The Unified Autonomy Stack architecture with its three modules of multi-modal perception, multi-behavior planning, and multi-layered safe navigation that work together for mission autonomy.
Load-bearing premise
That the three modules continue to integrate and perform synergistically when used on new robot types or in environments different from the tested ones.
What would settle it
Observing whether the stack fails to maintain safe operation or requires major modifications when deployed on a new robot morphology, such as a wheeled vehicle, in a previously untested environment like a dense forest or urban area with moving obstacles.
Figures

















read the original abstract
We introduce and open-source the Unified Autonomy Stack, a system-level solution that enables resilient autonomy across diverse aerial and ground robot morphologies. The architecture centers on three synergistic modules -- multi-modal perception, multi-behavior planning, and multi-layered safe navigation -- that together deliver comprehensive mission autonomy. The stack fuses data from LiDAR, radar, vision, and inertial sensing, enabling (a) robust localization and mapping through factor graph-based fusion, (b) semantic scene understanding, (c) motion and informative path planning through sampling-based techniques adaptive across spatial scales, as well as (d) multi-layered safe navigation both through planning on the online reconstructed map and deep learning-driven exteroceptive policies alongside last-resort safety filters using control barrier functions. The resulting behaviors include safe GNSS-denied navigation into unknown and perceptually-degraded regions, exploration of complex environments, object discovery, and efficient inspection planning. The stack has been field-tested and validated on both aerial (rotorcraft) and ground (legged) robots operating in a host of demanding environments, including self-similar and smoke-filled settings, with complex geometries and high obstacle clutter. These tests demonstrate resilient performance in challenging conditions. To facilitate ease of adoption, we open-source the implementation alongside supporting documentation, validation, and evaluation datasets https://github.com/ntnu-arl/unified_autonomy_stack. A video giving the overview of the paper and the field experiments is available at https://youtu.be/l8Su8OXsM-E.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Unified Autonomy Stack, an open-source modular architecture for resilient robot autonomy across aerial (rotorcraft) and ground (legged) morphologies. It centers on three synergistic modules: multi-modal perception fusing LiDAR/radar/vision/inertial data via factor graphs for localization/mapping and semantic understanding; multi-behavior planning using adaptive sampling-based methods across scales; and multi-layered safe navigation combining online map planning, deep-learning exteroceptive policies, and control-barrier-function safety filters. The central claim is that this stack delivers comprehensive mission autonomy—including GNSS-denied navigation, exploration, object discovery, and inspection—in perceptually degraded, cluttered environments, validated through field tests on multiple platforms.
Significance. If the empirical claims hold, the work provides a practical, integrated blueprint for generalizable autonomy that addresses real-world challenges in adverse conditions. The open-source release, supporting documentation, and datasets are explicit strengths that promote reproducibility and adoption. Field validation on distinct morphologies under GNSS-denied and smoke-filled conditions lends concrete support to the resilience narrative, distinguishing the contribution from purely simulation-based or single-platform studies.
major comments (1)
- [Abstract / Field Validation] Abstract and validation narrative: the resilience claims are grounded in field tests, yet only qualitative evidence of successful operation is described; quantitative metrics (e.g., localization error, path efficiency, success rates across trials) and systematic failure-case analysis are absent, which is load-bearing for rigorously substantiating cross-morphology performance.
minor comments (2)
- [Abstract] The GitHub repository and video links are provided but should be explicitly cross-referenced in the main text with version tags or DOIs to ensure long-term accessibility.
- Notation for the three modules is introduced clearly in the abstract; ensure consistent naming and acronym usage throughout the module descriptions to avoid reader confusion.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive recommendation for minor revision. We address the single major comment point-by-point below.
read point-by-point responses
-
Referee: [Abstract / Field Validation] Abstract and validation narrative: the resilience claims are grounded in field tests, yet only qualitative evidence of successful operation is described; quantitative metrics (e.g., localization error, path efficiency, success rates across trials) and systematic failure-case analysis are absent, which is load-bearing for rigorously substantiating cross-morphology performance.
Authors: We agree that the addition of quantitative metrics and a systematic failure-case analysis would strengthen the substantiation of the cross-morphology resilience claims. The current manuscript and supplementary video emphasize qualitative demonstrations of successful operation in GNSS-denied, smoke-filled, and cluttered environments across rotorcraft and legged platforms. In the revised version we will add a dedicated validation subsection that reports concrete metrics drawn from the field datasets, including localization RMSE from the factor-graph fusion, navigation success rates over repeated trials, path-efficiency comparisons, and a concise analysis of observed failure modes together with the mitigations provided by the multi-layered safety filters. These numbers will be supported by the already-released evaluation datasets. revision: yes
Circularity Check
No significant circularity; architecture claims rest on empirical validation
full rationale
The paper introduces a modular autonomy architecture consisting of multi-modal perception, multi-behavior planning, and multi-layered safe navigation. Its central claims of resilient cross-morphology performance are supported directly by descriptions of field experiments on rotorcraft and legged platforms in GNSS-denied and perceptually degraded environments, along with open-sourced code and datasets. No equations, parameter-fitting steps, or derivations are present that reduce by construction to the inputs. Self-citations, if any, are not load-bearing for the core claims, which remain externally falsifiable via the reported tests and released artifacts.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard robotics assumptions including accurate sensor models, reliable low-level control, and the existence of feasible trajectories in the environments tested.
Reference graph
Works this paper leans on
-
[1]
On-Manifold Preintegration for Real-Time Visual--Inertial Odometry , year=
Forster, Christian and Carlone, Luca and Dellaert, Frank and Scaramuzza, Davide , journal=. On-Manifold Preintegration for Real-Time Visual--Inertial Odometry , year=
-
[2]
and Kim, Ayoung and Heckman, Christoffer , journal=
Harlow, Kyle and Jang, Hyesu and Barfoot, Timothy D. and Kim, Ayoung and Heckman, Christoffer , journal=. A New Wave in Robotics: Survey on Recent MmWave Radar Applications in Robotics , year=
-
[3]
Frank Dellaert and. borglab/gtsam , year =. doi:10.5281/zenodo.5794541 , publisher =
-
[4]
Kaess, Michael and Johannsson, Hordur and Roberts, Richard and Ila, Viorela and Leonard, John and Dellaert, Frank , booktitle =. 2011 , month = may, pages =
work page 2011
-
[5]
Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback , year =
Michael Bloesch and Michael Burri and Sammy Omari and Marco Hutter and Roland Siegwart , journal =. Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback , year =
-
[6]
GaRLIO: Gravity Enhanced Radar-LiDAR-Inertial Odometry , year=
Noh, Chiyun and Yang, Wooseong and Jung, Minwoo and Jung, Sangwoo and Kim, Ayoung , booktitle=. GaRLIO: Gravity Enhanced Radar-LiDAR-Inertial Odometry , year=
-
[7]
AF-RLIO: Adaptive Fusion of Radar-LiDAR-Inertial Information for Robust Odometry in Challenging Environments , year=
Qian, Chenglong and Xu, Yang and Shi, Xiufang and Chen, Jiming and Li, Liang , booktitle=. AF-RLIO: Adaptive Fusion of Radar-LiDAR-Inertial Information for Robust Odometry in Challenging Environments , year=
-
[8]
FAST-LIVO2: Fast, Direct LiDAR–Inertial–Visual Odometry , year=
Zheng, Chunran and Xu, Wei and Zou, Zuhao and Hua, Tong and Yuan, Chongjian and He, Dongjiao and Zhou, Bingyang and Liu, Zheng and Lin, Jiarong and Zhu, Fangcheng and Ren, Yunfan and Wang, Rong and Meng, Fanle and Zhang, Fu , journal=. FAST-LIVO2: Fast, Direct LiDAR–Inertial–Visual Odometry , year=
-
[9]
FAST-LIO2: Fast Direct LiDAR-Inertial Odometry , year=
Xu, Wei and Cai, Yixi and He, Dongjiao and Lin, Jiarong and Zhang, Fu , journal=. FAST-LIO2: Fast Direct LiDAR-Inertial Odometry , year=
- [10]
-
[11]
Nemiroff, Ryan and Chen, Kenny and Lopez, Brett T. , booktitle=. Joint On-Manifold Gravity and Accelerometer Intrinsics Estimation for Inertially Aligned Mapping , year=
-
[12]
IEEE Robotics and Automation Letters (RA-L) , pages =
Vizzo, Ignacio and Guadagnino, Tiziano and Mersch, Benedikt and Wiesmann, Louis and Behley, Jens and Stachniss, Cyrill , title =. IEEE Robotics and Automation Letters (RA-L) , pages =. 2023 , codeurl =. doi:10.1109/LRA.2023.3236571 , volume =
-
[13]
Kenji Koide and Masashi Yokozuka and Shuji Oishi and Atsuhiko Banno , keywords =. GLIM: 3D range-inertial localization and mapping with GPU-accelerated scan matching factors , journal =. 2024 , issn =. doi:https://doi.org/10.1016/j.robot.2024.104750 , url =
-
[14]
Campos, Carlos and Elvira, Richard and Rodríguez, Juan J. Gómez and M. Montiel, José M. and D. Tardós, Juan , journal=. ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual–Inertial, and Multimap SLAM , year=
-
[15]
Patrick Geneva and Kevin Eckenhoff and Woosik Lee and Yulin Yang and Guoquan Huang , Booktitle =. 2020 , Address =
work page 2020
-
[16]
2019 , eprint=
A General Optimization-based Framework for Local Odometry Estimation with Multiple Sensors , author=. 2019 , eprint=
2019
-
[17]
2025 , eprint=
Simultaneous Triggering and Synchronization of Sensors and Onboard Computers , author=. 2025 , eprint=
2025
-
[18]
OpenVINS: A Research Platform for Visual-Inertial Estimation , year=
Geneva, Patrick and Eckenhoff, Kevin and Lee, Woosik and Yang, Yulin and Huang, Guoquan , booktitle=. OpenVINS: A Research Platform for Visual-Inertial Estimation , year=
-
[19]
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping , author=. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2020 , organization=
2020
-
[20]
, author =
evo: Python package for the evaluation of odometry and SLAM. , author =
-
[21]
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
M2p2: A multi-modal passive perception dataset for off-road mobility in extreme low-light conditions , author=. 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2025 , organization=
2025
-
[22]
, booktitle=
Carrillo, Henry and Reid, Ian and Castellanos, José A. , booktitle=. On the comparison of uncertainty criteria for active SLAM , year=
-
[23]
Peter J. Huber , journal =. Robust Estimation of a Location Parameter , urldate =
-
[24]
Low-drift and real-time lidar odometry and mapping , volume =. Autonomous Robots , author =. 2017 , pages =. doi:10.1007/s10514-016-9548-2 , abstract =
-
[25]
Khedekar, Nikhil and Kulkarni, Mihir and Alexis, Kostas , month = oct, year =. 2022. doi:10.1109/IROS47612.2022.9981108 , abstract =
-
[26]
Journal of Field Robotics , author =
Keyframe‐based thermal–inertial odometry , volume =. Journal of Field Robotics , author =. 2020 , pages =. doi:10.1002/rob.21932 , abstract =
-
[27]
Khattak, Shehryar and Nguyen, Huan and Mascarich, Frank and Dang, Tung and Alexis, Kostas , month = sep, year =. Complementary. 2020. doi:10.1109/ICUAS48674.2020.9213865 , abstract =
-
[28]
IEEE Transactions on Cognitive and Developmental Systems , author =
Morpho. IEEE Transactions on Cognitive and Developmental Systems , author =. 2023 , keywords =. doi:10.1109/TCDS.2022.3148543 , abstract =
-
[29]
Control allocation—. Automatica , author =. 2013 , pages =. doi:10.1016/j.automatica.2013.01.035 , abstract =
-
[30]
Annual Review of Statistics and Its Application , author =
Statistical. Annual Review of Statistics and Its Application , author =. 2019 , note =. doi:10.1146/annurev-statistics-030718-104938 , abstract =
-
[31]
Encyclopedia of Robotics , pages=
Aerial field robotics , author=. Encyclopedia of Robotics , pages=. 2022 , publisher=
2022
-
[32]
Champion-level drone racing using deep reinforcement learning,
Champion-level drone racing using deep reinforcement learning , volume =. Nature , author =. 2023 , pages =. doi:10.1038/s41586-023-06419-4 , abstract =
-
[33]
Dharmadhikari, Mihir and De Petris, Paolo and Kulkarni, Mihir and Khedekar, Nikhil and Nguyen, Huan and Stene, Arnt Erik and Sjøvold, Eivind and Solheim, Kristian and Gussiaas, Bente and Alexis, Kostas , month = dec, year =. Autonomous. 2023 21st. doi:10.1109/ICAR58858.2023.10406928 , abstract =
-
[34]
Annual Review of Control, Robotics, and Autonomous Systems , volume=
Into the robotic depths: Analysis and insights from the darpa subterranean challenge , author=. Annual Review of Control, Robotics, and Autonomous Systems , volume=. 2023 , publisher=
2023
-
[35]
Raghunathan, Rahul Nath and Skulstad, Robert and Li, Guoyuan and Zhang, Houxiang , month = oct, year =. Design of. doi:10.1109/IECON51785.2023.10312100 , abstract =
-
[36]
Real-time instance detection with fast incremental learning
Mysore, Siddharth and Mabsout, Bassel and Mancuso, Renato and Saenko, Kate , month = may, year =. Regularizing. 2021. doi:10.1109/ICRA48506.2021.9561138 , language =
-
[37]
Pretraining-finetuning
Chen, Ci and Yu, Jiyu and Lu, Haojian and Gao, Hongbo and Xiong, Rong and Wang, Yue , month = sep, year =. Pretraining-finetuning
-
[38]
Probabilistic policy reuse in a reinforcement learning agent , isbn =
Fernández, Fernando and Veloso, Manuela , month = may, year =. Probabilistic policy reuse in a reinforcement learning agent , isbn =. Proceedings of the fifth international joint conference on. doi:10.1145/1160633.1160762 , abstract =
-
[39]
Zhou, Yi and Barnes, Connelly and Lu, Jingwan and Yang, Jimei and Li, Hao , month = jun, year =. On the
-
[40]
International conference on machine learning , pages=
Optnet: Differentiable optimization as a layer in neural networks , author=. International conference on machine learning , pages=. 2017 , organization=
work page 2017
-
[41]
Curobo: Parallelized collision-free robot motion generation
Zhang, Dingqi and Loquercio, Antonio and Wu, Xiangyu and Kumar, Ashish and Malik, Jitendra and Mueller, Mark W. , month = may, year =. Learning a. 2023. doi:10.1109/ICRA48891.2023.10160836 , abstract =
-
[42]
FIESTA: Fast incremental euclidean distance fields for online motion planning of aerial robots
Molchanov, Artem and Chen, Tao and Hönig, Wolfgang and Preiss, James A. and Ayanian, Nora and Sukhatme, Gaurav S. , month = nov, year =. Sim-to-(. 2019. doi:10.1109/IROS40897.2019.8967695 , abstract =
-
[43]
Sekar, Ramanan and Rybkin, Oleh and Daniilidis, Kostas and Abbeel, Pieter and Hafner, Danijar and Pathak, Deepak , month = jun, year =. Planning to
-
[44]
Burda, Yuri and Edwards, Harrison and Storkey, Amos and Klimov, Oleg , month = oct, year =. Exploration by
-
[45]
and Silver, David and Kavukcuoglu, Koray , month = nov, year =
Jaderberg, Max and Mnih, Volodymyr and Czarnecki, Wojciech Marian and Schaul, Tom and Leibo, Joel Z. and Silver, David and Kavukcuoglu, Koray , month = nov, year =. Reinforcement
-
[46]
Curiosity-driven Exploration by Self-supervised Prediction
Pathak, Deepak and Agrawal, Pulkit and Efros, Alexei A. and Darrell, Trevor , month = may, year =. Curiosity-driven. doi:10.48550/arXiv.1705.05363 , abstract =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1705.05363
- [47]
-
[48]
Rudin, Nikita and Hoeller, David and Hutter, Marco and Reist, Philipp , year =. Learning to
-
[49]
Makoviychuk, Viktor and Wawrzyniak, Lukasz and Guo, Yunrong and Lu, Michelle and Storey, Kier and Macklin, Miles and Hoeller, David and Rudin, Nikita and Allshire, Arthur and Handa, Ankur and State, Gavriel , month = aug, year =. Isaac
-
[50]
Kulkarni, Mihir and Forgaard, Theodor J. L. and Alexis, Kostas , month = may, year =. Aerial
- [51]
-
[52]
Addressing
Fujimoto, Scott and van Hoof, Herke and Meger, David , month = oct, year =. Addressing
-
[53]
Ivanovic, Boris and Harrison, James and Sharma, Apoorva and Chen, Mo and Pavone, Marco , month = sep, year =
-
[54]
Schubert, Ingmar and Zhang, Jingwei and Bruce, Jake and Bechtle, Sarah and Parisotto, Emilio and Riedmiller, Martin and Springenberg, Jost Tobias and Byravan, Arunkumar and Hasenclever, Leonard and Heess, Nicolas , month = sep, year =. A
-
[55]
Decision
Chen, Lili and Lu, Kevin and Rajeswaran, Aravind and Lee, Kimin and Grover, Aditya and Laskin, Michael and Abbeel, Pieter and Srinivas, Aravind and Mordatch, Igor , month = jun, year =. Decision
-
[56]
Diversity is
Eysenbach, Benjamin and Gupta, Abhishek and Ibarz, Julian and Levine, Sergey , month = oct, year =. Diversity is
-
[57]
Huang, Wenlong and Mordatch, Igor and Pathak, Deepak , month = jul, year =. One
-
[58]
Zico , month = dec, year =
Amos, Brandon and Kolter, J. Zico , month = dec, year =
-
[59]
Proceedings of the 40 th International Conference on Machine Learning, Honolulu, Hawaii, USA
Jump-. Proceedings of the 40 th International Conference on Machine Learning, Honolulu, Hawaii, USA. PMLR 202, 2023 , author =. 2023 , file =
2023
-
[60]
Eberhard, Onno and Hollenstein, Jakob and Pinneri, Cristina and Martius, Georg , year =
-
[61]
Karen and Turk, Greg , month = may, year =
Yu, Wenhao and Tan, Jie and Liu, C. Karen and Turk, Greg , month = may, year =. Preparing for the
-
[62]
Proximal
Schulman, John and Wolski, Filip and Dhariwal, Prafulla and Radford, Alec and Klimov, Oleg , month = aug, year =. Proximal
-
[63]
and Abbeel, Pieter , month = apr, year =
Schulman, John and Levine, Sergey and Moritz, Philipp and Jordan, Michael I. and Abbeel, Pieter , month = apr, year =. Trust
-
[64]
Lee, John M. , year =. Introduction to. doi:10.1007/978-1-4419-7940-7 , file =
-
[65]
Solà, Joan and Deray, Jeremie and Atchuthan, Dinesh , month = dec, year =. A micro
-
[66]
and Tegmark, Max , month = may, year =
Liu, Ziming and Wang, Yixuan and Vaidya, Sachin and Ruehle, Fabian and Halverson, James and Soljačić, Marin and Hou, Thomas Y. and Tegmark, Max , month = may, year =
-
[67]
Journal of Mathematical Imaging and Vision , author =
Metrics for. Journal of Mathematical Imaging and Vision , author =. 2009 , pages =. doi:10.1007/s10851-009-0161-2 , language =
-
[68]
Reif, John H. , month = oct, year =. Complexity of the mover's problem and generalizations , url =. 20th. doi:10.1109/SFCS.1979.10 , language =
-
[69]
Curobo: Parallelized collision-free robot motion generation
Ortiz-Haro, Joaquim and Ha, Jung-Su and Driess, Danny and Karpas, Erez and Toussaint, Marc , month = may, year =. Learning. 2023. doi:10.1109/ICRA48891.2023.10160887 , abstract =
-
[70]
, year =
Lee, John M. , year =. Riemannian manifolds: an introduction to curvature , isbn =
-
[71]
LaValle, Steven M. , month = may, year =. Planning. doi:10.1017/CBO9780511546877 , file =
-
[72]
2009 , doi =
Nonlinear. 2009 , doi =
2009
-
[73]
Learning
Peters, Lasse and Fridovich-Keil, David and Ferranti, Laura and Stachniss, Cyrill and Alonso-Mora, Javier and Laine, Forrest , month = may, year =. Learning
-
[74]
Aerial additive manufacturing with multiple autonomous robots , volume =. Nature , author =. 2022 , pages =. doi:10.1038/s41586-022-04988-4 , language =
-
[75]
Shi, Guanya and Hönig, Wolfgang and Yue, Yisong and Chung, Soon-Jo , month = mar, year =. Neural-
-
[76]
Advances in Applied Clifford Algebras , author =
The integration of angular velocity , volume =. Advances in Applied Clifford Algebras , author =. 2017 , keywords =. doi:10.1007/s00006-017-0793-z , abstract =
-
[77]
Construction of
Lindsey, Quentin and Mellinger, Daniel and Kumar, Vijay , file =. Construction of
-
[78]
Uzakov, Timur and Nascimento, Tiago P. and Saska, Martin , month = sep, year =. 2020. doi:10.1109/ICUAS48674.2020.9213967 , abstract =
-
[79]
Quan, Quan , year =. Introduction to. doi:10.1007/978-981-10-3382-7 , file =
-
[80]
Quaternions,
Dam, Erik B and Koch, Martin and Lillholm, Martin , file =. Quaternions,
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.