DepthPolyp: Pseudo-Depth Guided Lightweight Segmentation for Real-Time Colonoscopy
Pith reviewed 2026-05-20 18:15 UTC · model grok-4.3
The pith
Pseudo-depth guidance lets a tiny model segment polyps more accurately than models 20 times larger while running in real time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
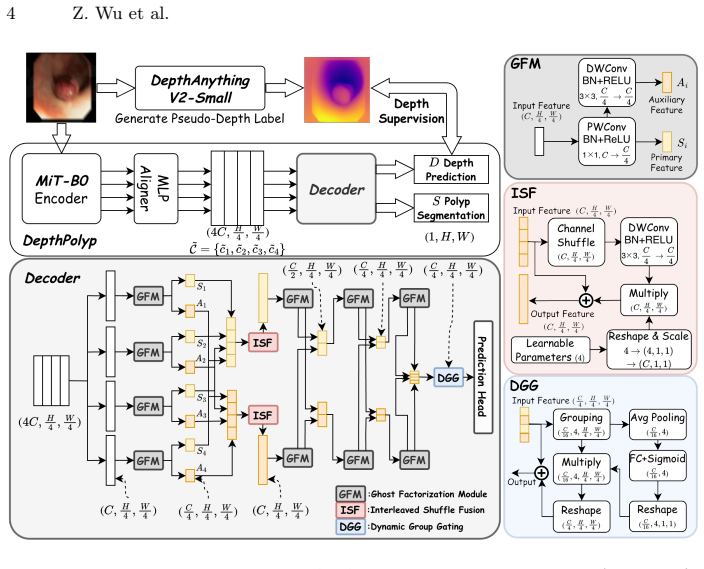
DepthPolyp performs pseudo-depth-guided multi-task learning inside an efficient backbone that uses hierarchical Ghost factorization, Interleaved Shuffle Fusion, and Dynamic Group Gating; when trained on degraded images it delivers stronger cross-dataset generalization than other lightweight networks and remains competitive with far larger models, reaching superior segmentation accuracy on PolypGen surgical videos at real-time speed and under 1 GMAC.
What carries the argument
Pseudo-depth guided multi-task learning that supplies an auxiliary depth map to steer feature extraction, implemented through hierarchical Ghost factorization for compact feature generation, Interleaved Shuffle Fusion for low-cost cross-scale mixing, and Dynamic Group Gating for adaptive per-group weighting.
If this is right
- Real-time polyp segmentation becomes feasible on standard clinical hardware without sacrificing accuracy in noisy conditions.
- Training on artificially degraded images transfers better to live surgical video than training on clean benchmarks alone.
- The same lightweight modules can be reused for other medical video tasks that must tolerate blur and reflections.
- Deployment in resource-limited clinics becomes practical because inference stays above 180 FPS on mobile devices.
Where Pith is reading between the lines
- The pseudo-depth auxiliary task could be added to segmentation pipelines for other endoscopic procedures such as bronchoscopy or gastroscopy.
- Similar efficient fusion and gating blocks might improve real-time object detection in other domains with unstable lighting, such as underwater or automotive vision.
- Combining the model with temporal tracking across video frames could further reduce false positives during rapid camera motion.
Load-bearing premise
That the pseudo-depth signal extracted from the same colonoscopy images will reliably help the network ignore motion blur, specular highlights, and lighting shifts that occur in actual clinical procedures.
What would settle it
A new collection of real surgical colonoscopy videos from different endoscopes or patient populations on which DepthPolyp no longer outperforms models many times larger or drops below real-time frame rates.
Figures


read the original abstract
Accurate polyp segmentation in colonoscopy is essential for early colorectal cancer detection, yet real-world clinical environments pose persistent challenges such as motion blur, specular reflections, and illumination instability. Most existing methods are optimized on clean benchmark images and suffer noticeable performance degradation when deployed in authentic surgical scenarios. We propose DepthPolyp, a lightweight and robust segmentation framework based on pseudo-depth-guided multi-task learning and efficient feature modulation. The architecture combines hierarchical Ghost factorization for compact feature generation, Interleaved Shuffle Fusion for low-cost cross-scale interaction, and Dynamic Group Gating for adaptive group-wise feature weighting. Extensive experiments demonstrate that DepthPolyp achieves strong cross-dataset generalization when trained on degraded data and evaluated on both clean and noisy target domains, consistently outperforming lightweight baselines and remaining competitive with substantially larger models. In real surgical video evaluation on PolypGen, DepthPolyp achieves better segmentation performance than models up to $20\times$ larger while preserving real-time inference speed. With only 3.57M parameters and 0.86 GMACs, the proposed method runs at over 180 FPS on mobile devices, making it well suited for real-time deployment in resource-constrained clinical environments. Code and pretrained weights are available at: https://github.com/ReaganWu/DepthPolyp/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces DepthPolyp, a lightweight polyp segmentation network for colonoscopy that uses pseudo-depth as an auxiliary task in a multi-task learning setup. The architecture integrates hierarchical Ghost factorization for compact features, Interleaved Shuffle Fusion for cross-scale interaction, and Dynamic Group Gating for adaptive weighting. The central claims are that training on degraded data yields strong generalization to clean and noisy domains, outperforming lightweight baselines while remaining competitive with models up to 20× larger on PolypGen real surgical videos, all while achieving real-time inference (>180 FPS) with 3.57M parameters and 0.86 GMACs.
Significance. If the robustness claims hold, the work would be significant for enabling practical, real-time polyp segmentation in authentic clinical environments where motion blur, specular reflections, and illumination changes are common. The focus on efficiency and open-sourcing of code and weights supports potential deployment in resource-constrained settings and improves reproducibility.
major comments (2)
- [Experiments] Experiments section: The manuscript reports strong cross-dataset and PolypGen results after training on degraded data, yet provides no quantitative metrics (e.g., depth estimation error or correlation) for pseudo-depth map quality on degraded versus clean frames. Without this, it is impossible to verify that the pseudo-depth signal remains informative under motion blur and specular reflections, which is required for the multi-task robustness claim to hold.
- [Ablation studies] Ablation studies: No experiment isolates the pseudo-depth branch by comparing the full model against an ablated version without depth guidance. This omission makes it difficult to attribute the reported gains on noisy target domains specifically to the pseudo-depth component rather than the efficient modules or training strategy alone.
minor comments (1)
- [Abstract] Abstract: While parameter count, GMACs, and FPS are stated, key segmentation metrics (Dice, IoU) on the primary benchmarks are not summarized, reducing the abstract's utility for quick assessment of performance claims.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. We address each major comment below and outline the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Experiments] Experiments section: The manuscript reports strong cross-dataset and PolypGen results after training on degraded data, yet provides no quantitative metrics (e.g., depth estimation error or correlation) for pseudo-depth map quality on degraded versus clean frames. Without this, it is impossible to verify that the pseudo-depth signal remains informative under motion blur and specular reflections, which is required for the multi-task robustness claim to hold.
Authors: We agree that quantitative metrics on pseudo-depth map quality would help substantiate the robustness claim. The pseudo-depth is produced by a fixed pre-trained estimator applied to both clean and degraded inputs without further fine-tuning. While the original submission focused on end-task segmentation metrics, we acknowledge the gap. In the revision we will add a table reporting depth estimation error (MAE and RMSE) and correlation coefficients between pseudo-depth maps and available ground-truth depth on both clean and synthetically degraded frames, directly addressing whether the auxiliary signal remains informative under the targeted degradations. revision: yes
-
Referee: [Ablation studies] Ablation studies: No experiment isolates the pseudo-depth branch by comparing the full model against an ablated version without depth guidance. This omission makes it difficult to attribute the reported gains on noisy target domains specifically to the pseudo-depth component rather than the efficient modules or training strategy alone.
Authors: We concur that isolating the pseudo-depth auxiliary task is necessary to attribute gains specifically to multi-task depth guidance. The original ablations examined the Ghost factorization, Interleaved Shuffle Fusion, and Dynamic Group Gating modules, but did not include a direct comparison with and without the depth branch. We will add this ablation in the revised manuscript, training an otherwise identical model without the pseudo-depth loss and reporting segmentation performance on both clean and noisy target domains to quantify the contribution of the depth guidance to cross-domain robustness. revision: yes
Circularity Check
No circularity: empirical architecture with independent experimental validation
full rationale
The paper proposes an empirical neural architecture (DepthPolyp) combining pseudo-depth multi-task learning with named efficient modules (hierarchical Ghost factorization, Interleaved Shuffle Fusion, Dynamic Group Gating) and validates it via cross-dataset generalization tests and real-time FPS measurements on PolypGen. No mathematical derivation chain, uniqueness theorem, or prediction step is present; performance claims rest on direct empirical comparisons rather than any quantity that reduces to the model's own fitted parameters or self-citations by construction. The work is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Pseudo-depth estimation supplies useful structural supervision that improves segmentation robustness under motion blur, specular reflections, and illumination changes.
invented entities (1)
-
Pseudo-depth map
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Scientific Data10(1), 75 (2023)
Ali,S.,Jha,D.,Ghatwary,N.,Realdon,S.,Cannizzaro,R.,Salem,O.E.,Lamarque, D., Daul, C., Riegler, M.A., Anonsen, K.V., et al.: A multi-centre polyp detection and segmentation dataset for generalisability assessment. Scientific Data10(1), 75 (2023)
work page 2023
-
[2]
Bernal, J., Sánchez, F.J., Fernández-Esparrach, G., Gil, D., Rodríguez, C., Vilar- iño, F.: Wm-dova maps for accurate polyp highlighting in colonoscopy: Validation vs. saliency maps from physicians. Computerized medical imaging and graphics 43, 99–111 (2015)
work page 2015
-
[3]
Pattern Recognition45(9), 3166–3182 (2012)
Bernal, J., Sánchez, J., Vilarino, F.: Towards automatic polyp detection with a polyp appearance model. Pattern Recognition45(9), 3166–3182 (2012)
work page 2012
-
[4]
TransUNet: Transformers Make Strong Encoders for Medical Image Segmentation
Chen, J., Lu, Y., Yu, Q., Luo, X., Adeli, E., Wang, Y., Lu, L., Yuille, A.L., Zhou, Y.:Transunet:Transformersmakestrongencodersformedicalimagesegmentation. arXiv preprint arXiv:2102.04306 (2021)
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[5]
Medical Image Analysis97, 103241 (2024)
Dai, D., Dong, C., Yan, Q., Sun, Y., Zhang, C., Li, Z., Xu, S.: I2u-net: A dual-path u-net with rich information interaction for medical image segmentation. Medical Image Analysis97, 103241 (2024)
work page 2024
-
[6]
Dinh, B.D., Nguyen, T.T., Tran, T.T., Pham, V.T.: 1m parameters are enough? a lightweight cnn-based model for medical image segmentation. In: 2023 Asia Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC). pp. 1279–1284. IEEE (2023)
work page 2023
-
[7]
In: International confer- ence on medical image computing and computer-assisted intervention
Fan, D.P., Ji, G.P., Zhou, T., Chen, G., Fu, H., Shen, J., Shao, L.: Pranet: Par- allel reverse attention network for polyp segmentation. In: International confer- ence on medical image computing and computer-assisted intervention. pp. 263–273. Springer (2020)
work page 2020
-
[8]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Han, K., Wang, Y., Tian, Q., Guo, J., Xu, C., Xu, C.: Ghostnet: More features from cheap operations. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 1580–1589 (2020)
work page 2020
-
[9]
Annals of internal medicine177(7), 919–928 (2024)
Hassan, C., Misawa, M., Rizkala, T., Mori, Y., Sultan, S., Facciorusso, A., An- tonelli, G., Spadaccini, M., Houwen, B.B., Rondonotti, E., et al.: Computer-aided diagnosis for leaving colorectal polyps in situ: a systematic review and meta- analysis. Annals of internal medicine177(7), 919–928 (2024)
work page 2024
-
[10]
Jain, A., Sinha, S., Mazumdar, S.: Comparative analysis of machine learning frame- worksforautomaticpolypcharacterization.BiomedicalSignalProcessingandCon- trol95, 106451 (2024) DepthPolyp15
work page 2024
-
[11]
In: International con- ference on multimedia modeling
Jha, D., Smedsrud, P.H., Riegler, M.A., Halvorsen, P., De Lange, T., Johansen, D., Johansen, H.D.: Kvasir-seg: A segmented polyp dataset. In: International con- ference on multimedia modeling. pp. 451–462. Springer (2019)
work page 2019
-
[12]
Journal of imaging8(6), 169 (2022)
Karmakar, R., Nooshabadi, S.: Mobile-polypnet: Lightweight colon polyp segmen- tation network for low-resource settings. Journal of imaging8(6), 169 (2022)
work page 2022
-
[13]
In: Proceedings of the IEEE conference on computer vision and pattern recognition
Kendall, A., Gal, Y., Cipolla, R.: Multi-task learning using uncertainty to weigh losses for scene geometry and semantics. In: Proceedings of the IEEE conference on computer vision and pattern recognition. pp. 7482–7491 (2018)
work page 2018
-
[14]
Expert Systems with Applications 295, 128835 (2026)
Li, J., Xu, Q., He, X., Liu, Z., Zhang, D., Wang, R., Qu, R., Qiu, G.: Cfformer: Cross cnn-transformer channel attention and spatial feature fusion for improved segmentation of heterogeneous medical images. Expert Systems with Applications 295, 128835 (2026)
work page 2026
-
[15]
Depth Anything 3: Recovering the Visual Space from Any Views
Lin, H., Chen, S., Liew, J.H., Chen, D.Y., Li, Z., Shi, G., Feng, J., Kang, B.: Depth anything 3: Recovering the visual space from any views. arXiv preprint arXiv:2511.10647 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[16]
Visual Intelligence3(1), 1 (2025)
Mei, J., Zhou, T., Huang, K., Zhang, Y., Zhou, Y., Wu, Y., Fu, H.: A survey on deep learning for polyp segmentation: Techniques, challenges and future trends. Visual Intelligence3(1), 1 (2025)
work page 2025
-
[17]
In: European Conference on Com- puter Vision
Phuong, T.N., Duy, V.N., Sakaino, H.: Bbd-polyp: Weakly supervised polyp seg- mentation via bounding box and depth map. In: European Conference on Com- puter Vision. pp. 392–408. Springer (2024)
work page 2024
-
[18]
In: International Conference on Medical image computing and computer-assisted intervention
Ronneberger, O., Fischer, P., Brox, T.: U-net: Convolutional networks for biomedi- cal image segmentation. In: International Conference on Medical image computing and computer-assisted intervention. pp. 234–241. Springer (2015)
work page 2015
-
[19]
In: International conference on medical image computing and computer-assisted intervention
Sun, J., Darbehani, F., Zaidi, M., Wang, B.: Saunet: Shape attentive u-net for interpretable medical image segmentation. In: International conference on medical image computing and computer-assisted intervention. pp. 797–806. Springer (2020)
work page 2020
-
[20]
In: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Taghavi, P., Langari, R., Pandey, G.: Swinmtl: A shared architecture for simultane- ous depth estimation and semantic segmentation from monocular camera images. In: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 4957–4964. IEEE (2024)
work page 2024
-
[21]
In: 2024 IEEE International Symposium on Biomedical Imaging (ISBI)
Tang, F., Ding, J., Quan, Q., Wang, L., Ning, C., Zhou, S.K.: Cmunext: An efficient medical image segmentation network based on large kernel and skip fusion. In: 2024 IEEE International Symposium on Biomedical Imaging (ISBI). pp. 1–5. IEEE (2024)
work page 2024
-
[22]
In: International confer- ence on medical image computing and computer-assisted intervention
Valanarasu, J.M.J., Oza, P., Hacihaliloglu, I., Patel, V.M.: Medical transformer: Gated axial-attention for medical image segmentation. In: International confer- ence on medical image computing and computer-assisted intervention. pp. 36–46. Springer (2021)
work page 2021
-
[23]
In: International conference on medical image computing and computer-assisted intervention
Valanarasu, J.M.J., Patel, V.M.: Unext: Mlp-based rapid medical image segmen- tation network. In: International conference on medical image computing and computer-assisted intervention. pp. 23–33. Springer (2022)
work page 2022
-
[24]
IEEE Signal Processing Letters32, 3062–3066 (2025)
Wang, P., Zhang, Z., Gao, G., Zhang, Y., Zheng, Z.: Agentpolyp: Accurate polyp segmentation via image enhancement agent. IEEE Signal Processing Letters32, 3062–3066 (2025)
work page 2025
-
[25]
Wu, Z., Ou, W., Tan, P.S., Yang, J., Fang, W., Wang, Z., Phan, R.C.W.: En- docaver: Handling fog, blur and glare in endoscopic images via joint deblurring- segmentation. In: ICASSP 2026 - 2026 IEEE International Conference on Acous- tics, Speech and Signal Processing (ICASSP). pp. 6981–6985 (2026)
work page 2026
-
[26]
Computers in Biology and Medicine183, 109223 (2024)
Wu, Z., Wu, Q., Fang, W., Ou, W., Wang, Q., Zhang, L., Chen, C., Wang, Z., Li, H.: Harmonizing unets: Attention fusion module in cascaded-unets for low-quality oct image fluid segmentation. Computers in Biology and Medicine183, 109223 (2024)
work page 2024
-
[27]
IEEE Transactions on Cybernetics54(9), 5040–5053 (2024) 16 Z
Xiao, B., Hu, J., Li, W., Pun, C.M., Bi, X.: Ctnet: Contrastive transformer net- work for polyp segmentation. IEEE Transactions on Cybernetics54(9), 5040–5053 (2024) 16 Z. Wu et al
work page 2024
-
[28]
Advances in neural information processing systems34, 12077–12090 (2021)
Xie, E., Wang, W., Yu, Z., Anandkumar, A., Alvarez, J.M., Luo, P.: Segformer: Simple and efficient design for semantic segmentation with transformers. Advances in neural information processing systems34, 12077–12090 (2021)
work page 2021
-
[29]
Yang, L., Kang, B., Huang, Z., Zhao, Z., Xu, X., Feng, J., Zhao, H.: Depth anything v2. arXiv:2406.09414 (2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[30]
Pattern Recognition154, 110554 (2024)
Yu, Z., Zhao, L., Liao, T., Zhang, X., Chen, G., Xiao, G.: A novel non-pretrained deep supervision network for polyp segmentation. Pattern Recognition154, 110554 (2024)
work page 2024
-
[31]
IEEE Signal Processing Letters (2024)
Zheng, Z., Wu, C., Jin, Y., Jia, X.: Polyp-dam: Polyp segmentation via depth anything model. IEEE Signal Processing Letters (2024)
work page 2024
-
[32]
Information Fusion108, 102392 (2024)
Zhou, W., Cai, Y., Dong, X., Qiang, F., Qiu, W.: Adrnet-s*: Asymmetric depth registration network via contrastive knowledge distillation for rgb-d mirror seg- mentation. Information Fusion108, 102392 (2024)
work page 2024
-
[33]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Zhu, S., Brazil, G., Liu, X.: The edge of depth: Explicit constraints between seg- mentation and depth. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 13116–13125 (2020)
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.