Motion-Enabled Tomography via Gaussian Mixture Models
Pith reviewed 2026-05-20 00:16 UTC · model grok-4.3
The pith
Gaussian mixture models with independent per-component motions enable reconstruction of moving objects in tomography by decoupling into two subproblems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
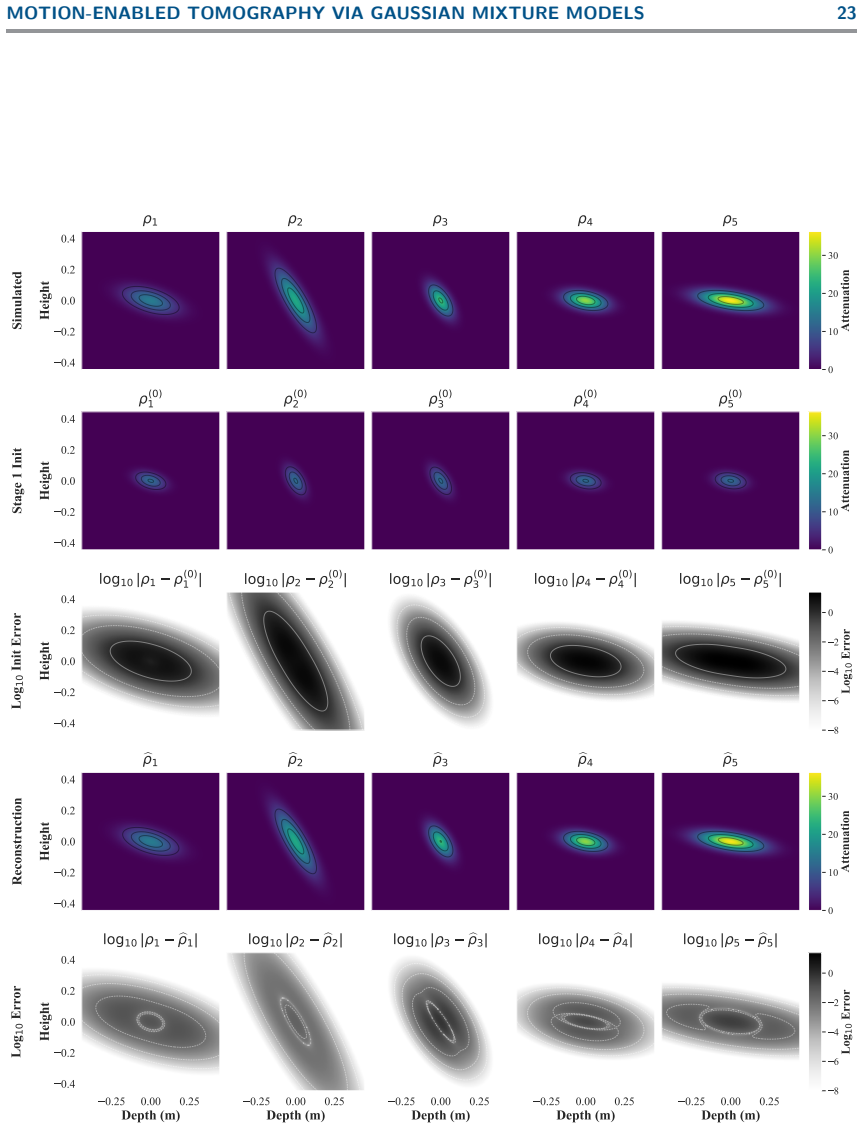
By representing the object as a collection of Gaussians each with independent motion parameters and using the closed form of the ray transform, the spatiotemporal tomography problem decouples into two sub-inverse problems. Solutions are then the minimizers of derived task-specific objective functions, resulting in an algorithm that applies to Euclidean spaces of arbitrary dimension and was demonstrated on a 2D case with five Gaussians on intersecting trajectories.
What carries the argument
The parametric spatiotemporal Gaussian mixture model with per-component angular velocity and projectile motion parameters, whose ray transform has a closed-form expression that enables the decoupling of the inverse problem.
If this is right
- The resulting algorithm applies to objects in Euclidean space of arbitrary dimension.
- Accurate reconstruction is achieved for a 5-Gaussian GMM with intersecting trajectories in 2D simulation.
- The method provides a foundation for further work with noisy data, 3D objects, and non-rigid body dynamics.
Where Pith is reading between the lines
- This technique may apply to medical imaging of moving tissues or industrial monitoring of rotating parts.
- Extensions could test the method on experimental data rather than simulations to assess robustness.
- Similar parametric approaches might address other inverse problems involving motion and projections.
Load-bearing premise
The relative motion between the object and the sensing apparatus provides sufficient angular coverage, and the object can be accurately approximated by a GMM with each component having independent angular velocity and projectile motion parameters.
What would settle it
Running the algorithm on a simulated dataset where the object cannot be well approximated by a GMM or where angular coverage is insufficient, and observing whether the recovered parameters deviate significantly from the known ground truth.
Figures






read the original abstract
Recovering physical properties of objects in motion is a core task across scientific and industrial applications. When the relative motion between the object and the sensing apparatus provides sufficient angular coverage, Computerized Tomography offers a powerful means of reconstruction. For such scenarios, we propose a parametric spatiotemporal model applied to Gaussian Mixture Models (GMM), in which each constituent Gaussian is parameterized by its own angular velocity, projectile motion, and geometry. GMM are a suitable means of reconstruction because they (i) admit accurate approximations in object space and (ii) have a closed form expression under the ray transform; enabling efficient forward predictions and exact gradient computations in data space. By decoupling the reconstruction problem into two sub-inverse problems, we characterize solutions as minimizers of task-specific objective functions that are derived and solved by utilizing the properties of (ii). The resulting algorithm we provide is applicable to objects in Euclidean space of arbitrary dimension. We validate the method on a simulated 2D problem, achieving accurate reconstruction of a 5-Gaussian GMM with intersecting trajectories. This also provides a foundation for further experimentation in settings with noisy data, 3D objects, and non-rigid body dynamics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a parametric spatiotemporal model for tomography of moving objects based on Gaussian Mixture Models (GMMs), with each Gaussian component having independent parameters for angular velocity, projectile motion, and geometry. It decouples the inverse problem into two sub-problems whose solutions are characterized as minimizers of derived task-specific objective functions that exploit the closed-form ray transform of the moving GMM. The resulting algorithm is asserted to apply in Euclidean spaces of arbitrary dimension and is validated via a 2D simulation recovering a 5-Gaussian GMM with intersecting trajectories.
Significance. If the decoupling is shown to preserve critical points of the joint objective, the approach would provide an efficient, gradient-exact method for motion-enabled tomography that scales to higher dimensions by leveraging standard GMM properties under the ray transform. The 2D simulation offers a concrete demonstration, though quantitative error metrics are not detailed in the abstract.
major comments (1)
- Abstract: the central claim that decoupling the reconstruction into two sub-inverse problems yields independent minimizers of task-specific objectives is load-bearing for the method. Because each Gaussian's position at projection time depends nonlinearly on its own motion parameters, the data-fidelity term couples geometry and motion variables; the manuscript provides no explicit verification that the separate minimizers coincide with a stationary point of the original joint functional or that alternating minimization converges to the joint reconstruction.
minor comments (2)
- Abstract: the validation statement 'achieving accurate reconstruction' is not accompanied by quantitative error metrics, noise levels, number of projections, or comparison to a joint-optimization baseline.
- Abstract: the claim of applicability to arbitrary dimensions is stated but the only reported experiment is 2D; a brief outline of the 3D extension or scaling argument would clarify the generality.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive feedback on our manuscript. We address the major comment below and will revise the paper to strengthen the theoretical justification of the decoupling approach.
read point-by-point responses
-
Referee: Abstract: the central claim that decoupling the reconstruction into two sub-inverse problems yields independent minimizers of task-specific objectives is load-bearing for the method. Because each Gaussian's position at projection time depends nonlinearly on its own motion parameters, the data-fidelity term couples geometry and motion variables; the manuscript provides no explicit verification that the separate minimizers coincide with a stationary point of the original joint functional or that alternating minimization converges to the joint reconstruction.
Authors: We thank the referee for highlighting this important point. In the manuscript we separate the variables into per-Gaussian geometric parameters and motion parameters, then exploit the linearity of the ray transform together with the closed-form expression for each moving Gaussian to obtain two task-specific objective functions that are minimized independently. The referee is correct that the current version does not contain an explicit proof that the resulting minimizers are stationary points of the joint functional, nor does it discuss convergence properties of any iterative scheme. Our procedure solves the two sub-problems sequentially rather than by alternating minimization; we will clarify this distinction in the revision. To address the concern directly, we will add a short subsection deriving the stationarity condition of the joint objective and showing that, under the independent per-component parameterization and sufficient angular coverage, setting the separate gradients to zero recovers the same critical points. This addition will be placed in the Methods section immediately after the derivation of the decoupled objectives. revision: yes
Circularity Check
No circularity: decoupling uses independent closed-form forward model
full rationale
The derivation characterizes solutions via minimizers of objectives built from the closed-form ray transform of each moving Gaussian component. This property of GMMs under the ray transform is a standard mathematical fact independent of the target reconstruction or any fitted parameters in the present work. The split into two sub-inverse problems is introduced as an algorithmic choice to exploit that closed form for separate geometry and motion estimation; it does not rename a fitted quantity as a prediction, invoke a self-citation uniqueness theorem, or smuggle an ansatz. Validation on simulated intersecting-trajectory data supplies an external check. The central claim therefore remains self-contained against the forward model rather than reducing to its own inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- number of Gaussians
axioms (2)
- domain assumption GMM admit accurate approximations in object space
- standard math Gaussians have a closed form expression under the ray transform
Reference graph
Works this paper leans on
-
[1]
Simulation of transmission electron microscope images of biological specimens , volume =
Hans Rullg. Simulation of transmission electron microscope images of biological specimens , volume =. 2011 , bdsk-url-1 =. doi:10.1111/j.1365-2818.2011.03497.x , journal =
-
[2]
Alfred K. Louis , doi =. Feature reconstruction in inverse problems , volume =. Inverse Problems , number =. 2011 , bdsk-url-1 =
work page 2011
-
[3]
A Survey of Multimodal Learning: Methods, Applications, and Future , volume =
Yuan Yuan and Zhaojian Li and Bin Zhao , doi =. A Survey of Multimodal Learning: Methods, Applications, and Future , volume =. ACM Computing Surveys , number =. 2025 , bdsk-url-1 =
work page 2025
-
[4]
A survey on multimodal large language models , volume =
Shukang Yin and Chaoyou Fu and Sirui Zhao and Ke Li and Xing Sun and Tong Xu and Enhong Chen , doi =. A survey on multimodal large language models , volume =. National Science Review , number =. 2024 , bdsk-url-1 =
work page 2024
-
[5]
Paul Pu Liang and Amir Zadeh and Louis-Philippe Morency , doi =. Foundations & Trends in Multimodal Machine Learning: Principles, Challenges, and Open Questions , volume =. ACM Computing Surveys , number =. 2024 , bdsk-url-1 =
work page 2024
-
[6]
Task adapted reconstruction for inverse problems , volume =
Jonas Adler and Sebastian Lunz and Olivier Verdier and Carola-Bibiane Sch. Task adapted reconstruction for inverse problems , volume =. 2022 , bdsk-url-1 =. doi:10.1088/1361-6420/ac28ec , journal =
- [7]
-
[8]
Zickert, Gustav and. Joint. Inverse Problems , volume=. 2022 , doi =
work page 2022
-
[9]
Rotations for N -Dimensional Graphics , author=. Graphics Gems. 1995 , doi =
work page 1995
-
[10]
Handbook of mathematical functions with formulas, graphs, and mathematical tables , author=. 1968 , publisher=
work page 1968
-
[11]
Knauer, Christian and L. The directed. Theoretical Computer Science , volume=. 2011 , doi =
work page 2011
-
[12]
IEEE transactions on pattern analysis and machine intelligence , volume=
An efficient algorithm for calculating the exact Hausdorff distance , author=. IEEE transactions on pattern analysis and machine intelligence , volume=. 2015 , doi =
work page 2015
-
[13]
Foundations of Computational Mathematics , volume=
Approximations of shape metrics and application to shape warping and empirical shape statistics , author=. Foundations of Computational Mathematics , volume=. 2005 , doi =
work page 2005
-
[14]
Surveys in Geophysics , volume=
Toward the scientific interpretation of geophysical well logs: Typical misunderstandings and countermeasures , author=. Surveys in Geophysics , volume=. 2023 , doi =
work page 2023
-
[15]
Enhanced Lithology Classification Using an Interpretable
Sun, Youzhuang and Pang, Shanchen and Li, Hengxiao and Qiao, Sibo and Zhang, Yongan , journal=. Enhanced Lithology Classification Using an Interpretable. 2025 , doi =
work page 2025
-
[16]
doi:10.2118/PW0558 , publisher =
PetroWiki , title =. doi:10.2118/PW0558 , publisher =
-
[17]
Pattern Recognition Letters , volume =
Fischer, Andreas and Riesen, Kaspar and Bunke, Horst , title =. Pattern Recognition Letters , volume =. 2017 , pages =
work page 2017
-
[18]
Breakthroughs in statistics: Methodology and distribution , volume =
Robust estimation of a location parameter , author=. Breakthroughs in statistics: Methodology and distribution , volume =. 1992 , doi=
work page 1992
- [19]
- [20]
-
[21]
Lawson, Charles L. and Hanson, Richard J. , year=. Solving least squares problems , doi =
-
[22]
Numerical optimization , author=. 2006 , edition =. doi:10.1007/978-0-387-40065-5 , publisher=
-
[23]
Yamada, Tetsushi and Di Santo, Simone and Bondabou, Karim and Prashant, Ajeet and Di Daniel, Andrea and Su, Laura and Francois, Matthias and Ouaaba, Khalid and Lockyer, Daniel and Prioul, Romain , journal =. 2024 , doi =
work page 2024
- [24]
-
[25]
SPE Annual Technical Conference and Exhibition , pages=
Image processing and machine learning applied to lithology identification, classification and quantification of thin section cutting samples , author=. SPE Annual Technical Conference and Exhibition , pages=. 2019 , doi =
work page 2019
-
[26]
Sadeghnejad, Saeid and Enzmann, Frieder and Kersten, Michael , title =. Applied Geochemistry , year =
-
[27]
Industrial Applications of Digital Rock Technology , journal =
Berg, Carl Fredrik and Lopez, Olivier and Berland, H. Industrial Applications of Digital Rock Technology , journal =. 2017 , volume =
work page 2017
-
[28]
Digital Rock Physics Benchmarks---Part I: Imaging and Segmentation , journal =
Andr. Digital Rock Physics Benchmarks---Part I: Imaging and Segmentation , journal =. 2013 , volume =
work page 2013
-
[29]
Digital Rock Physics Benchmarks---Part II: Computing Effective Properties , journal =
Andr. Digital Rock Physics Benchmarks---Part II: Computing Effective Properties , journal =. 2013 , volume =
work page 2013
-
[30]
Madonna, Claudio and Almqvist, Bjarne S. G. and Saenger, Erik H. , title =. Geophysical Journal International , year =
-
[31]
Lenormand, Roland and Egermann, Patrick and Bouillot, Jean , title =. Proceedings of the 3rd EAGE North African/Mediterranean Petroleum and Geosciences Conference and Exhibition , year =
-
[32]
Journal of Petroleum Technology , year =
Rassenfoss, Stephen , title =. Journal of Petroleum Technology , year =
-
[33]
Rock Mechanics and Rock Engineering , year =
Cong, Richao and Yang, Ruiyue and Li, Gensheng and Huang, Zhongwei and Gong, Yanjin and Jing, Meiyang and Lu, Meiquan , title =. Rock Mechanics and Rock Engineering , year =
-
[34]
Construction and Building Materials , year =
Chung, Sang-Yeop and Kim, Ji-Su and Stephan, Dietmar and Han, Tong-Seok , title =. Construction and Building Materials , year =
-
[35]
Sanchez, Dario Ferreira and Simionovici, Alexandre S. and Lemelle, Laurence and Cuartero, Vera and Mathon, Olivier and Pascarelli, Sakura and Bonnin, Anne and Shapiro, Russell and Konhauser, Kurt and Grolimund, Daniel and Bleuet, Pierre , title =. Scientific Reports , year =
- [36]
-
[37]
X-ray Imaging for Homeland Security , booktitle =
Zentai, G. X-ray Imaging for Homeland Security , booktitle =
- [38]
- [39]
-
[40]
Giudiceandrea, Fabio and Katsevich, Alexander and Ursella, Enrico , title =. SIAM News , date =
-
[41]
Digital Transformation of Industry , publisher =
Stark, Joseph , title =. Digital Transformation of Industry , publisher =
-
[42]
Couceiro, Jo. Industrial. 22nd International Nondestructive Testing and Evaluation of Wood Symposium , location =
-
[43]
Microtec CT Log Scanner
-
[44]
and Smith, John Rogers , title =
Rahmani, Reza and Ferrell, Ray E. and Smith, John Rogers , title =. SPE Reservoir Evaluation & Engineering , year =
-
[45]
Mudde, R. F. and Alles, J. and van der Hagen, T. H. J. J. , title =. Measurement Science and Technology , year =
-
[46]
Graas, A. B. and Wagner, E. C. and van Leeuwen, T. and van Ommen, J. R. and Batenburg, K. J. and Lucka, F. and Portela, L. M. , title =. Powder Technology , year =
-
[47]
10th International Conference on Scale Space and Variational Methods in Computer Vision (
Bi-level optimization and implicit differentiation as a framework for optimal experimental design in tomography , author=. 10th International Conference on Scale Space and Variational Methods in Computer Vision (. 2025 , doi =
work page 2025
-
[48]
Chen, Muyuan and Schmid, Michael F. and Chiu, Wah , title =. Nature Methods , year =
-
[49]
Learning residue level protein dynamics with multiscale Gaussians
Learning residue level protein dynamics with multiscale. 2025 , bdsk-url-1 =. doi:10.48550/arXiv.2509.01038 , eprint =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2509.01038 2025
-
[50]
doi:10.48550/arXiv.2509.25075 , eprint =
2025 , bdsk-url-1 =. doi:10.48550/arXiv.2509.25075 , eprint =
-
[51]
CryoSplat: Gaussian Splatting for Cryo-EM Homogeneous Reconstruction
2025 , bdsk-url-1 =. doi:10.48550/arXiv.2508.04929 , eprint =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2508.04929 2025
- [52]
-
[53]
2026 , bdsk-url-1 =. doi:10.48550/arXiv.2604.04693 , eprint =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2604.04693 2026
-
[54]
Stauffer, Chris and Grimson, W. Eric L. , title =. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) , year =
-
[55]
Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) , year =
Zhao, Bingchen and Wen, Xin and Han, Kai , title =. Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) , year =
-
[56]
European Conference on Computer Vision (ECCV) , year =
Huang, Yuanhui and Zheng, Wenzhao and Zhang, Yunpeng and Zhou, Jie and Lu, Jiwen , title =. European Conference on Computer Vision (ECCV) , year =
-
[57]
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) , year =
Pfaff, Patrick and Plagemann, Christian and Burgard, Wolfram , title =. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) , year =
-
[58]
Field and Service Robotics , publisher =
Tabib, Wennie and Michael, Nathan , title =. Field and Service Robotics , publisher =. 2021 , pages =
work page 2021
-
[59]
doi:10.48550/arXiv.2307.00071 , eprint =
2023 , bdsk-url-1 =. doi:10.48550/arXiv.2307.00071 , eprint =
-
[60]
Persistent Object. 2025 , bdsk-url-1 =. doi:10.48550/arXiv.2503.01452 , eprint =
-
[61]
Halacheva, Anna-Maria and Zaech, Jan-Nico and Wang, Xi and Paudel, Danda Pani and Van Gool, Luc , title =. arXiv preprint , year =. 2507.00886 , doi =
-
[62]
Physically Embodied. 2024 , bdsk-url-1 =. doi:10.48550/arXiv.2406.03855 , eprint =
-
[63]
doi:10.48550/arXiv.2410.12262 , eprint =
2024 , bdsk-url-1 =. doi:10.48550/arXiv.2410.12262 , eprint =
-
[64]
ACM Transactions on Graphics , year =
Zhang, Yifan and Liu, Wei and Wang, Peng and Zhang, Jun , title =. ACM Transactions on Graphics , year =
-
[65]
IEEE Transactions on Visualization and Computer Graphics , year =
Wu, Tong and Chen, Zhiqin and Liu, Yebin , title =. IEEE Transactions on Visualization and Computer Graphics , year =
-
[66]
3D Gaussian Splatting for Real-Time Radiance Field Rendering , journal =
Kerbl, Bernhard and Kopanas, Georgios and Leimk. 3D Gaussian Splatting for Real-Time Radiance Field Rendering , journal =. 2023 , volume =
work page 2023
-
[67]
ACM Transactions on Graphics , year =
Xu, Yida and Hu, Shoukang and Wang, Yue and Liu, Yebin , title =. ACM Transactions on Graphics , year =
-
[68]
ACM Transactions on Graphics , year =
Wang, Shiqing and Liu, Lingjie and Xu, Zexiang and Yu, Jingyi , title =. ACM Transactions on Graphics , year =
-
[69]
Computer Graphics Forum , year =
Bouaziz, Abdelaziz and Laga, Hamid and Wannous, Hazem and Sohel, Ferdous , title =. Computer Graphics Forum , year =
-
[70]
doi:10.48550/arXiv.2210.00379 , eprint =
2026 , bdsk-url-1 =. doi:10.48550/arXiv.2210.00379 , eprint =
work page internal anchor Pith review doi:10.48550/arxiv.2210.00379 2026
-
[71]
IEEE Transactions on Visualization and Computer Graphics , note =
Mingyuan Yao and Yukang Huo and Yang Ran and Qingbin Tian and Ruifeng Wang and Haihua Wang , title =. IEEE Transactions on Visualization and Computer Graphics , note =. doi:10.1109/TVCG.2026.3677182 , year =
-
[72]
Model selection and multimodel inference: a practical information-theoretic approach , author=. 2002 , publisher=
work page 2002
-
[73]
IEEE signal processing magazine , volume=
Model-order selection: a review of information criterion rules , author=. IEEE signal processing magazine , volume=. 2004 , publisher=
work page 2004
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.