GOAL: Graph-based Objective-Aligned Diffusion Solvers for Dynamic Multi-Objective Optimization
Pith reviewed 2026-05-20 07:11 UTC · model grok-4.3
The pith
A conditioned diffusion model on heterogeneous graphs solves multi-objective scheduling problems with full feasibility and near-zero error across different constraint structures.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
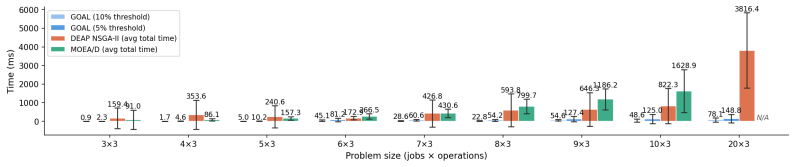
GOAL is a conditioned diffusion solver over relational graph representations that enables controllable decision generations by conditioning on human-specified objectives. It introduces a heterogeneous graph encoding in which distinct edge types, corresponding to different classes of constraints, define the message passing structure of the graph neural network, allowing information to propagate selectively. The approach generalizes across the Flow Shop Problem, Job Shop Scheduling Problem, and Flexible Job Shop Scheduling Problem without architectural modification. On these benchmarks for problem sizes up to 20 jobs and 60 operations, it reaches 100% solution feasibility and MAPE below 0.20%
What carries the argument
The heterogeneous graph encoding with distinct edge types for different constraint classes, which structures the message passing in the graph neural network to support selective information flow and objective-conditioned diffusion sampling.
If this is right
- Solutions can be generated controllably by specifying different objective priorities at inference time rather than retraining the model.
- The same trained model works on FSP, JSP, and FJSP despite their differing constraint structures.
- Inference runs up to 25 times faster than NSGA-II or MOEA/D while producing higher-quality solutions.
- All generated solutions satisfy every constraint by construction, eliminating post-processing repair steps.
Where Pith is reading between the lines
- The conditioning mechanism could support interactive optimization where a user adjusts objectives on the fly during a production run.
- Extending the edge-type ontology to include stochastic or time-varying constraints might allow handling of real-world uncertainty without redesigning the diffusion process.
- Because the graph structure is the only place problem-specific information enters, similar encodings could transfer the method to other domains such as vehicle routing or resource allocation.
Load-bearing premise
The heterogeneous graph encoding with distinct edge types for different constraint classes enables selective message passing that supports generalization across structurally distinct problem types without any architectural modification.
What would settle it
Applying the unchanged GOAL model to a scheduling problem with an additional constraint class not seen in FSP, JSP, or FJSP and observing either feasibility below 100% or MAPE above 0.20% on the objectives.
Figures


read the original abstract
Existing neural combinatorial optimization solvers frame solution search as imitation of optimal decisions, inherently limiting their utility to single-objective minimization and static constraints. We propose GOAL, a conditioned diffusion solver over relational graph representations that enables controllable decision generations by conditioning on human-specified objectives. We introduce a heterogeneous graph encoding in which distinct edge types, corresponding to different classes of constraints, define the message passing structure of the graph neural network, which allows information to propagate selectively according to the ontology of each constraint. GOAL is instantiated and evaluated on three canonical scheduling benchmarks of various constraint complexity: the Flow Shop Problem (FSP), the Job Shop Scheduling Problem (JSP), and the Flexible Job Shop Scheduling Problem (FJSP). Generalization is demonstrated across structurally distinct constraint regimes and problem types without architectural modification. On all three benchmarks, GOAL achieves 100% solution feasibility and near-zero MAPE (below 0.20%) on multiple objectives for problem sizes up to 20 jobs and 60 operations, outperforming NSGA-II and MOEA/D in both solution quality and inference speed by up to 25x.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes GOAL, a conditioned diffusion solver that operates over heterogeneous relational graph representations of scheduling problems. Distinct edge types corresponding to different constraint classes structure the message passing in the underlying GNN, allowing the model to be conditioned on human-specified objectives for controllable multi-objective solution generation. The approach is evaluated on FSP, JSP, and FJSP benchmarks and claims to achieve 100% solution feasibility together with MAPE below 0.20% on multiple objectives for instances up to 20 jobs and 60 operations, while generalizing across these structurally distinct problem types without architectural modification and delivering up to 25x inference speedup relative to NSGA-II and MOEA/D.
Significance. If the reported performance and generalization results hold under rigorous controls, the work would represent a meaningful advance in neural combinatorial optimization by extending diffusion-based solvers to multi-objective, constraint-heterogeneous settings. The use of ontology-aware heterogeneous edges for selective message passing offers a concrete mechanism for incorporating problem structure that could improve feasibility and transfer across scheduling variants.
major comments (2)
- [Heterogeneous Graph Encoding] Heterogeneous Graph Encoding section: The central claim that distinct edge types for different constraint classes enable selective message passing that supports generalization across FSP, JSP, and FJSP without architectural changes is load-bearing for the reported 100% feasibility and cross-problem results. No ablation is presented that collapses the edge types into a single homogeneous relation while holding GNN architecture, diffusion conditioning, and training data fixed; without this comparison it remains unclear whether the performance arises from the claimed ontology-aware propagation or from overall model capacity.
- [Experimental results] Experimental results section: The manuscript reports 100% feasibility and MAPE below 0.20% together with 25x speedups, yet provides insufficient detail on the precise definitions and measurement procedures for feasibility and MAPE, the implementation of the NSGA-II and MOEA/D baselines, the number of independent runs, and any statistical testing. These omissions prevent verification that the quantitative claims are robustly supported by the data.
minor comments (2)
- [Abstract] The abstract would be strengthened by a single sentence summarizing the diffusion training objective or sampling procedure.
- [Method] Notation for the conditioning vector and edge-type embeddings should be introduced once and used consistently in all equations and figures.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback. We address each major comment below and indicate the revisions that will be incorporated to strengthen the manuscript.
read point-by-point responses
-
Referee: [Heterogeneous Graph Encoding] Heterogeneous Graph Encoding section: The central claim that distinct edge types for different constraint classes enable selective message passing that supports generalization across FSP, JSP, and FJSP without architectural changes is load-bearing for the reported 100% feasibility and cross-problem results. No ablation is presented that collapses the edge types into a single homogeneous relation while holding GNN architecture, diffusion conditioning, and training data fixed; without this comparison it remains unclear whether the performance arises from the claimed ontology-aware propagation or from overall model capacity.
Authors: We agree that an explicit ablation isolating the contribution of heterogeneous edge types would strengthen the central claim. In the revised manuscript we will add this ablation: all edge types will be collapsed into a single homogeneous relation while the GNN architecture, diffusion conditioning, and training data remain fixed. We will report the resulting feasibility, MAPE, and cross-problem generalization metrics to quantify the benefit of ontology-aware message passing. revision: yes
-
Referee: [Experimental results] Experimental results section: The manuscript reports 100% feasibility and MAPE below 0.20% together with 25x speedups, yet provides insufficient detail on the precise definitions and measurement procedures for feasibility and MAPE, the implementation of the NSGA-II and MOEA/D baselines, the number of independent runs, and any statistical testing. These omissions prevent verification that the quantitative claims are robustly supported by the data.
Authors: We acknowledge that additional experimental details are required for reproducibility and verification. In the revised manuscript we will expand the Experimental results section to specify: (i) exact definitions and procedures for feasibility (constraint satisfaction checks) and MAPE (mean absolute percentage error on each objective), (ii) full implementation details and hyper-parameters for the NSGA-II and MOEA/D baselines, (iii) the number of independent runs (five runs with distinct random seeds), and (iv) statistical significance tests (Wilcoxon rank-sum tests with p-values). These additions will substantiate the reported performance. revision: yes
Circularity Check
No circularity: architecture and empirical claims are self-contained
full rationale
The paper introduces GOAL as a new conditioned diffusion solver using heterogeneous graph encodings for multi-objective scheduling. The abstract and described method present the heterogeneous edge types and selective message passing as an architectural choice enabling generalization across FSP/JSP/FJSP without modification, with performance (100% feasibility, <0.20% MAPE, 25x speedup) reported from benchmark evaluations rather than any derivation that reduces to fitted inputs or self-citations by construction. No equations, uniqueness theorems, or ansatzes are shown that equate the claimed results to prior fitted quantities or self-referential definitions. The central claims rest on empirical outcomes and the proposed ontology-aware GNN structure, which does not reduce to its own inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
heterogeneous graph encoding in which distinct edge types, corresponding to different classes of constraints, define the message passing structure of the graph neural network
-
IndisputableMonolith/Foundation/DimensionForcing.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
GOAL achieves 100% solution feasibility and near-zero MAPE ... outperforming NSGA-II and MOEA/D ... by up to 25×
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Embodied intelligence via learning and evolution
David Ha and Yujin Tang. Embodied intelligence via learning and evolution. InAdvances in Neural Information Processing Systems, 2023
work page 2023
-
[2]
Scott Reed et al. A generalist agent. InTransactions on Machine Learning Research, 2022
work page 2022
-
[3]
Champion-level drone racing using deep reinforcement learning
Elia Kaufmann et al. Champion-level drone racing using deep reinforcement learning. 2023. 10
work page 2023
-
[4]
Learning to walk in minutes using massively parallel deep reinforcement learning
Nikita Rudin, David Hoeller, Philipp Reist, and Marco Hutter. Learning to walk in minutes using massively parallel deep reinforcement learning. InConference on Robot Learning, 2022
work page 2022
-
[5]
Amazon. Amazon launches a new ai foundation model to power its robotic fleet and deploys its 1 millionth robot.https://www.aboutamazon.com/news/operations/ amazon-million-robots-ai-foundation-model, 2024. Accessed: 2025
work page 2024
-
[6]
Industry 4.0.Business and Information Systems Engineering, 6(4):239–242, 2014
Heiner Lasi, Peter Fettke, Hans-Georg Kemper, Thomas Feld, and Michael Hoffmann. Industry 4.0.Business and Information Systems Engineering, 6(4):239–242, 2014
work page 2014
-
[7]
Malte Brettel, Niklas Friederichsen, Michael Keller, and Marius Rosenberg. How virtual- ization, decentralization and network building change the manufacturing landscape.Interna- tional Journal of Mechanical, Aerospace, Industrial and Mechatronics Engineering, 8(1):37– 44, 2014
work page 2014
-
[8]
The surprising effectiveness of PPO in cooperative multi-agent games
Chao Yu, Akash Velu, Eugene Vinitsky, Jiaxuan Gao, Yu Wang, Alexandre Bayen, and Yi Wu. The surprising effectiveness of PPO in cooperative multi-agent games. InAdvances in Neural Information Processing Systems, 2022
work page 2022
-
[9]
Multi-agent deep reinforcement learning: A survey.Arti- ficial Intelligence Review, 55:895–943, 2022
Sven Gronauer and Klaus Diepold. Multi-agent deep reinforcement learning: A survey.Arti- ficial Intelligence Review, 55:895–943, 2022
work page 2022
-
[10]
Dynamic task allocation for multi-robot systems using graph neural networks
Shengchao Liu et al. Dynamic task allocation for multi-robot systems using graph neural networks. InAdvances in Neural Information Processing Systems, 2023
work page 2023
-
[11]
ScheduleNet: Learn to solve multi-agent scheduling problems with reinforcement learning
Junyoung Park, Sanjar Bakhtiyar, and Jinkyoo Park. ScheduleNet: Learn to solve multi-agent scheduling problems with reinforcement learning. InarXiv preprint arXiv:2106.03051, 2021
-
[12]
Andrea Corsini, Angelo Porrello, Simone Calderara, and Mauro Dell’Amico. Self-labeling the job shop scheduling problem.Advances in Neural Information Processing Systems, 37:105528–105551, 2024
work page 2024
-
[13]
Machine behaviour.Nature, 568(7753):477–486, 2019
Iyad Rahwan, Manuel Cebrian, Nick Obradovich, Josh Bongard, Daniel C Dennett, Joanna Doyle, Simon Driessche, Jeffrey Dyer, Ziv Epstein, Eduardo Graells-Garrido, et al. Machine behaviour.Nature, 568(7753):477–486, 2019
work page 2019
-
[14]
Coop- erative inverse reinforcement learning
Dylan Hadfield-Menell, Smitha Milli, Pieter Abbeel, Stuart Russell, and Anca Dragan. Coop- erative inverse reinforcement learning. InAdvances in Neural Information Processing Systems, volume 29, pages 3909–3917, 2016
work page 2016
-
[15]
Xingyu Li, Aydin Nassehi, Bogdan I. Epureanu, Jian Cao, S. Jack Hu, Lihui Wang, and Robert X. Gao. Generative manufacturing.Journal of Manufacturing Systems, 2026. Ac- cepted for publication, to appear
work page 2026
-
[16]
Evolutionary dynamic multi- objective optimisation: A survey.ACM Computing Surveys, 55(4):1–47, 2022
Shouyong Jiang, Juan Zou, Shengxiang Yang, and Xin Yao. Evolutionary dynamic multi- objective optimisation: A survey.ACM Computing Surveys, 55(4):1–47, 2022
work page 2022
-
[17]
Kalyanmoy Deb, Amrit Pratap, Sameer Agarwal, and T Meyarivan. A fast and elitist mul- tiobjective genetic algorithm: NSGA-II.IEEE Transactions on Evolutionary Computation, 6(2):182–197, 2002
work page 2002
-
[18]
Hui Li and Qingfu Zhang. Multiobjective optimization problems with complicated pareto sets, MOEA/D and NSGA-II.IEEE Transactions on Evolutionary Computation, 13(2):284–302, 2009
work page 2009
-
[19]
Michael L Pinedo.Scheduling: Theory, Algorithms, and Systems. Springer, 5th edition, 2016
work page 2016
-
[20]
Evolutionary optimization in dynamic environments.Kluwer Academic Pub- lishers, 2001
Jürgen Branke. Evolutionary optimization in dynamic environments.Kluwer Academic Pub- lishers, 2001
work page 2001
-
[21]
Paolo Brandimarte. Routing and scheduling in a flexible job shop by tabu search.Annals of Operations Research, 41(3):157–183, 1993. 11
work page 1993
-
[22]
Xinyi Hu, Jasper C.H. Lee, Jimmy H.M. Lee, and Peter J. Stuckey. Multi-stage pre- dict+optimize for (mixed integer) linear programs. InAdvances in Neural Information Pro- cessing Systems, volume 37, 2024
work page 2024
-
[23]
Veronique Sels, Nele Gheysen, and Mario Vanhoucke. A comparison of priority rules for the job shop scheduling problem under different flow time-and tardiness-related objective func- tions.International Journal of Production Research, 50(15):4255–4270, 2012
work page 2012
-
[24]
Jian Zhang, Guofu Ding, Yisheng Zou, Shengfeng Qin, and Jianlin Fu. Review of job shop scheduling research and its new perspectives under industry 4.0.Journal of intelligent manu- facturing, 30(4):1809–1830, 2019
work page 2019
-
[25]
Ching-Fang Liaw. An iterative improvement approach for the nonpreemptive open shop scheduling problem.European Journal of Operational Research, 111(3):509–517, 1998
work page 1998
-
[26]
Qingfu Zhang and Hui Li. MOEA/D: A multiobjective evolutionary algorithm based on de- composition.IEEE Transactions on Evolutionary Computation, 11(6):712–731, 2007
work page 2007
-
[27]
El-Ghazali Talbi.Metaheuristics: From Design to Implementation. John Wiley & Sons, 2009
work page 2009
-
[28]
Many-objective optimization: An engineering design perspective
Peter J Fleming, Robin C Purshouse, and Robert J Lygoe. Many-objective optimization: An engineering design perspective. InInternational Conference on Evolutionary Multi-Criterion Optimization, pages 14–32. Springer, 2005
work page 2005
-
[29]
Multi-task learning as multi-objective optimization
Ozan Sener and Vladlen Koltun. Multi-task learning as multi-objective optimization. InAd- vances in Neural Information Processing Systems, volume 31, 2018
work page 2018
-
[30]
Xi Lin, Hui-Ling Zhen, Zhenhua Li, Qingfu Zhang, and Sam Kwong. Pareto multi-task learn- ing. InAdvances in Neural Information Processing Systems, volume 32, 2019
work page 2019
-
[31]
Yoshua Bengio, Andrea Lodi, and Antoine Prouvost. Machine learning for combinatorial optimization: A methodological tour d’horizon.European Journal of Operational Research, 290(2):405–421, 2021
work page 2021
-
[32]
Learning to solve combinatorial optimization problems on real-world graphs in linear time
Dražen Vu ˇckovi´c et al. Learning to solve combinatorial optimization problems on real-world graphs in linear time. InAdvances in Neural Information Processing Systems, 2022
work page 2022
-
[33]
Wouter Kool, Herke van Hoof, and Max Welling. Attention, learn to solve routing problems! InInternational Conference on Learning Representations, 2019
work page 2019
-
[34]
Oriol Vinyals, Meire Fortunato, and Navdeep Jaitly. Pointer networks. InAdvances in Neural Information Processing Systems, volume 28, 2015
work page 2015
-
[35]
Reinforce- ment learning for solving the vehicle routing problem
Mohammadreza Nazari, Afshin Oroojlooy, Lawrence Snyder, and Martin Takác. Reinforce- ment learning for solving the vehicle routing problem. InAdvances in Neural Information Processing Systems, volume 31, 2018
work page 2018
-
[36]
arXiv preprint arXiv:1906.01227 , year=
Chaitanya K Joshi, Thomas Laurent, and Xavier Bresson. An efficient graph convolutional network technique for the travelling salesman problem. InarXiv preprint arXiv:1906.01227, 2019
-
[37]
Zhiqing Sun and Yiming Yang. Difusco: Graph-based diffusion solvers for combinatorial optimization.Advances in neural information processing systems, 36:3706–3731, 2023
work page 2023
-
[38]
Expensive multi-objective bayesian optimization based on diffusion models
Bingdong Li, Zixiang Di, Yongfan Lu, Hong Qian, Feng Wang, Peng Yang, Ke Tang, and Aimin Zhou. Expensive multi-objective bayesian optimization based on diffusion models. In Proceedings of the AAAI Conference on Artificial Intelligence, volume 39, pages 27063–27071, 2025
work page 2025
-
[39]
Feng Wang, Jinsong Xie, Aimin Zhou, and Ke Tang. A new prediction strategy for dynamic multi-objective optimization using diffusion model.IEEE Transactions on Evolutionary Com- putation, 2025. 12
work page 2025
-
[40]
Chenyang Li, Gary G Yen, and Zhenan He. Diffusion learning-guided evolution for large- scale dynamic multi-objective optimization.IEEE Transactions on Evolutionary Computation, 2026
work page 2026
-
[41]
Jan Karel Lenstra and Alexander H. G. Rinnooy Kan.Complexity of Scheduling under Prece- dence Constraints, volume 26. INFORMS, 1977
work page 1977
-
[42]
Michael R Garey, David S Johnson, and Ravi Sethi. The complexity of flowshop and jobshop scheduling.Mathematics of Operations Research, 1(2):117–129, 1976
work page 1976
-
[43]
Springer, Berlin, Heidelberg, 2nd edition, 2005
Matthias Ehrgott.Multicriteria Optimization. Springer, Berlin, Heidelberg, 2nd edition, 2005
work page 2005
-
[44]
Thibaut Lust and Jacques Teghem. The multiobjective traveling salesman problem: A survey and a new approach.Advances in Multi-Objective Nature Inspired Computing, pages 119–141, 2010
work page 2010
-
[45]
George A Miller. The magical number seven, plus or minus two: Some limits on our capacity for processing information.Psychological Review, 63(2):81–97, 1956
work page 1956
-
[46]
SMAC3: A versatile bayesian optimization pack- age for hyperparameter optimization
Marius Lindauer, Katharina Eggensperger, Matthias Feurer, André Biedenkapp, Difan Deng, Carolin Sass, Ed Bergman, and Frank Hutter. SMAC3: A versatile bayesian optimization pack- age for hyperparameter optimization. InJournal of Machine Learning Research, volume 23, pages 1–9, 2022
work page 2022
-
[47]
Andrzej P Wierzbicki. The use of reference objectives in multiobjective optimization.Multiple Criteria Decision Making Theory and Application, pages 468–486, 1980
work page 1980
-
[48]
Foundation models for decision making: Problems, methods, and opportunities, 2023
Sherry Yang, Ofir Nachum, Yilun Du, Jason Wei, Pieter Abbeel, and Dale Schuurmans. Foun- dation models for decision making: Problems, methods, and opportunities. InarXiv preprint arXiv:2303.04129, 2023
-
[49]
Llms can schedule.arXiv preprint arXiv:2408.06993, 2024
Henrik Abgaryan, Ararat Harutyunyan, and Tristan Cazenave. Llms can schedule.arXiv preprint arXiv:2408.06993, 2024
-
[50]
Fei Yu, Liang Gao, Xinyu Li, Chao Lu, and Qihao Liu. Automated scheduling heuristic gen- eration and evaluation via large language model.IEEE Transactions on Evolutionary Compu- tation, 2026
work page 2026
-
[51]
˙Ibrahim O˘guz Çetinkaya, ˙I Esra Büyüktahtakın, Parshin Shojaee, and Chandan K Reddy. Dis- covering heuristics with large language models (llms) for mixed-integer programs: Single- machine scheduling.Computers & Operations Research, page 107325, 2025
work page 2025
-
[52]
Yidan Wang, Jiayin Wang, and Zhiwei Chu. Multi-agent large language models as evolutionary optimizers for scheduling optimization.Computers & Industrial Engineering, 206:111197, 2025
work page 2025
-
[53]
Language models are few-shot learn- ers
Tom B Brown, Benjamin Mann, Nick Ryder, Melanie Subbiah, Jared D Kaplan, Prafulla Dhariwal, Arvind Neelakantan, Pranav Shyam, Girish Sastry, Amanda Askell, Sandhini Agar- wal, Ariel Herbert-V oss, Gretchen Krueger, Tom Henighan, Rewon Child, Aditya Ramesh, Daniel M Ziegler, Jeffrey Wu, Clemens Winter, Christopher Hesse, Mark Chen, Eric Sigler, Mateusz Lit...
work page 1901
-
[54]
LLaMA: Open and Efficient Foundation Language Models
Hugo Touvron, Thibaut Lavril, Gautier Izacard, Xavier Martinet, Marie-Anne Lachaux, Tim- othée Lacroix, Baptiste Rozière, Naman Goyal, Eric Hambro, Faisal Azhar, et al. LLaMA: Open and efficient foundation language models. InarXiv preprint arXiv:2302.13971, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[55]
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Lukasz Kaiser, and Illia Polosukhin. Attention is all you need. InAdvances in Neural Infor- mation Processing Systems, volume 30, 2017. 13
work page 2017
-
[56]
Generative manu- facturing systems.SSRN Electron
Xingyu Li, A Nassehi, H Yang, F Tao, J Sutherland, L Wang, and R Gao. Generative manu- facturing systems.SSRN Electron. J, 2025
work page 2025
-
[57]
Efficient active search for combinato- rial optimization problems
André Hottung, Yeong-Dae Kwon, and Kevin Murphy. Efficient active search for combinato- rial optimization problems. InInternational Conference on Learning Representations, 2022
work page 2022
-
[58]
Denoising diffusion probabilistic models
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising diffusion probabilistic models. In Advances in Neural Information Processing Systems, volume 33, pages 6840–6851, 2020
work page 2020
-
[59]
Struc- tured denoising diffusion models in discrete state-spaces
Jacob Austin, Daniel D Johnson, Jonathan Ho, Daniel Tarlow, and Rianne van den Berg. Struc- tured denoising diffusion models in discrete state-spaces. InAdvances in Neural Information Processing Systems, volume 34, 2021
work page 2021
-
[60]
Score-based generative modeling through stochastic differential equations
Yang Song, Jascha Sohl-Dickstein, Diederik P Kingma, Abhishek Kumar, Stefano Ermon, and Ben Poole. Score-based generative modeling through stochastic differential equations. In International Conference on Learning Representations, 2021
work page 2021
-
[61]
Diffusion models for black-box optimization
Siddarth Krishnamoorthy, Satvik Mehul Mashkaria, and Aditya Grover. Diffusion models for black-box optimization. InInternational Conference on Machine Learning, pages 17842– 17857. PMLR, 2023
work page 2023
-
[62]
Ruihuai Liang, Bo Yang, Zhiwen Yu, Bin Guo, Xuelin Cao, Mérouane Debbah, H Vincent Poor, and Chau Yuen. Diffsg: A generative solver for network optimization with diffusion model.arXiv preprint arXiv:2408.06701, 2024
-
[63]
Diffusion model for data-driven black-box optimization.arXiv preprint arXiv:2403.13219, 2024
Zihao Li, Hui Yuan, Kaixuan Huang, Chengzhuo Ni, Yinyu Ye, Minshuo Chen, and Mengdi Wang. Diffusion model for data-driven black-box optimization.arXiv preprint arXiv:2403.13219, 2024
-
[64]
Dongxia Wu, Nikki Lijing Kuang, Ruijia Niu, Yi-An Ma, and Rose Yu. Diff-bbo: Diffusion- based inverse modeling for black-box optimization.arXiv preprint arXiv:2407.00610, 2024
-
[65]
Yang Li, Jinpei Guo, Runzhong Wang, Hongyuan Zha, and Junchi Yan. Fast t2t: Optimization consistency speeds up diffusion-based training-to-testing solving for combinatorial optimiza- tion.Advances in Neural Information Processing Systems, 37:30179–30206, 2024
work page 2024
-
[66]
A large manu- facturing decision model for human-centric decision-making.CIRP Annals, 2025
Xingyu Li, Aydin Nassehi, S Jack Hu, Byung Gun Joung, and Robert X Gao. A large manu- facturing decision model for human-centric decision-making.CIRP Annals, 2025
work page 2025
-
[67]
Comboptnet: Fit the right np-hard problem by learning integer programming constraints
Anselm Paulus, Michal Rolínek, Vít Musil, Brandon Amos, and Georg Martius. Comboptnet: Fit the right np-hard problem by learning integer programming constraints. InInternational Conference on Machine Learning, pages 8443–8453. PMLR, 2021
work page 2021
-
[68]
DC3: A learning method for optimization with hard constraints
Priya L Donti, David Rolnick, and J Zico Kolter. DC3: A learning method for optimization with hard constraints. InInternational Conference on Learning Representations, 2021
work page 2021
-
[69]
Learning to dispatch for job shop scheduling via deep reinforcement learning
Cong Zhang, Wen Song, Zhiguang Cao, Jie Zhang, Puay Siew Tan, and Chi Xu. Learning to dispatch for job shop scheduling via deep reinforcement learning. InAdvances in Neural Information Processing Systems, 2020
work page 2020
-
[70]
Learning to delegate for large-scale vehicle routing
Sirui Li, Zhongxia Yan, and Cathy Wu. Learning to delegate for large-scale vehicle routing. InAdvances in Neural Information Processing Systems, volume 34, 2021
work page 2021
-
[71]
Learning the pareto front with hypernetworks
Aviv Navon, Aviv Shamsian, Ethan Fetaya, and Gal Chechik. Learning the pareto front with hypernetworks. InInternational Conference on Learning Representations, 2021
work page 2021
-
[72]
Classifier-Free Diffusion Guidance
Jonathan Ho and Tim Salimans. Classifier-free diffusion guidance.arXiv preprint arXiv:2207.12598, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[73]
Multilayer feedforward networks are universal approximators.Neural Networks, 2(5):359–366, 1989
Kurt Hornik, Maxwell Stinchcombe, and Halbert White. Multilayer feedforward networks are universal approximators.Neural Networks, 2(5):359–366, 1989
work page 1989
-
[74]
Modeling relational data with graph convolutional networks
Michael Schlichtkrull, Thomas N Kipf, Peter Bloem, Rianne van den Berg, Ivan Titov, and Max Welling. Modeling relational data with graph convolutional networks. InEuropean Se- mantic Web Conference, pages 593–607, 2018. 14
work page 2018
-
[75]
Relational inductive biases, deep learning, and graph networks
Peter W. Battaglia et al. Relational inductive biases, deep learning, and graph networks.arXiv preprint arXiv:1806.01261, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[76]
Hamilton, Rex Ying, and Jure Leskovec
William L. Hamilton, Rex Ying, and Jure Leskovec. Inductive representation learning on large graphs. InAdvances in Neural Information Processing Systems, 2017
work page 2017
-
[77]
Diffusion models beat GANs on image synthesis
Prafulla Dhariwal and Alexander Nichol. Diffusion models beat GANs on image synthesis. In Advances in Neural Information Processing Systems, volume 34, pages 8780–8794, 2021
work page 2021
-
[78]
FiLM: Visual reasoning with a general conditioning layer
Ethan Perez, Florian Strub, Harm de Vries, Vincent Dumoulin, and Aaron Courville. FiLM: Visual reasoning with a general conditioning layer. InProceedings of the AAAI Conference on Artificial Intelligence, volume 32, 2018
work page 2018
-
[79]
Gaussian Error Linear Units (GELUs)
Dan Hendrycks and Kevin Gimpel. Gaussian error linear units (GELUs).arXiv preprint arXiv:1606.08415, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[80]
Schütt, Andreas Mayr, Michael Gastegger, and Philipp Marquetand
Justin Gilmer, Kristof T. Schütt, Andreas Mayr, Michael Gastegger, and Philipp Marquetand. Neural message passing for quantum chemistry. InInternational Conference on Machine Learning, 2017
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.