YASPS: A Symbolic Framework for Extensible, High-Performance IPC Simulation
Pith reviewed 2026-05-25 04:52 UTC · model grok-4.3
The pith
YASPS uses explicit JOIN and UNION relational operators in a differentiable program to support rapid IPC extensions while preserving competitive GPU performance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
YASPS makes the relational structure of IPC energies first-class by introducing JOIN and UNION operators into a differentiable intermediate representation; dedicated differentiation rules together with Jacobian reuse in the second-order procedure then enable automatic global sparsity derivation, block-sparse assembly, and JIT compilation of CUDA kernels, so that the same high-level description supports both rapid extensibility and competitive performance.
What carries the argument
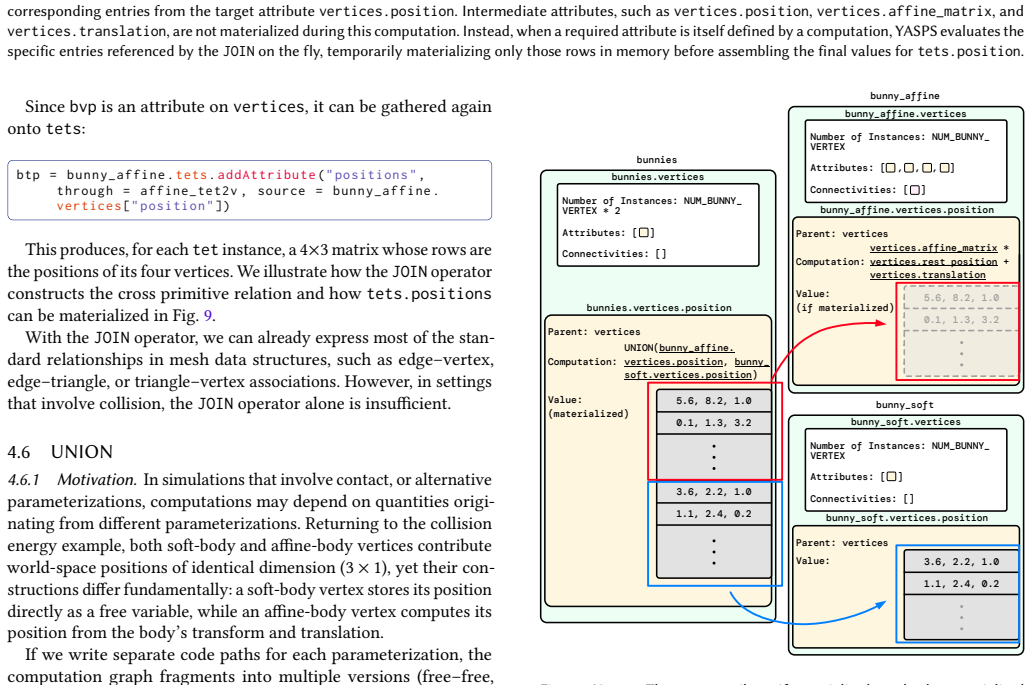
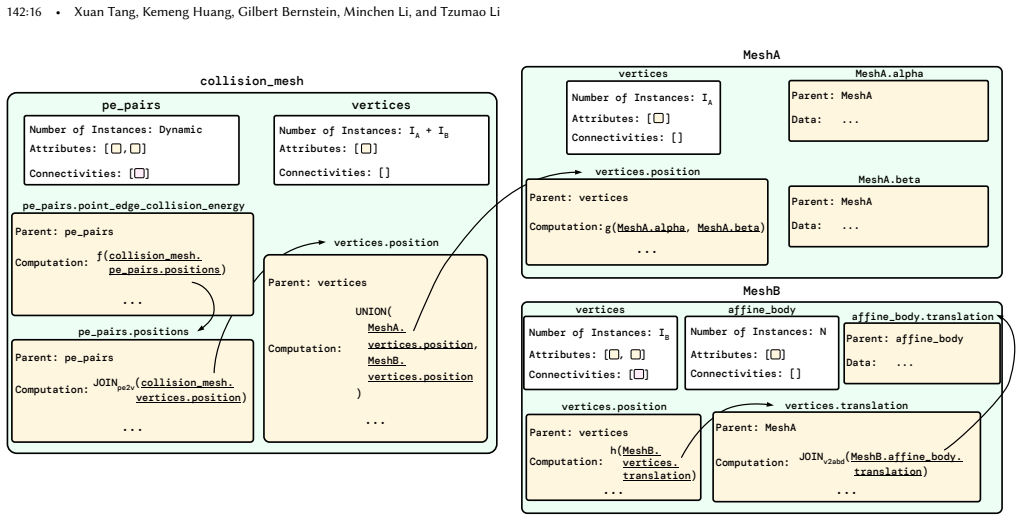
The JOIN and UNION first-class relational operators, which compose quantities across user-declared relations and represent alternative parameterizations, allowing symbolic differentiation, sparsity extraction, and structure-aware kernel generation.
If this is right
- Adding new energies, primitive types, or parameterizations requires only front-end changes with minimal back-end modification.
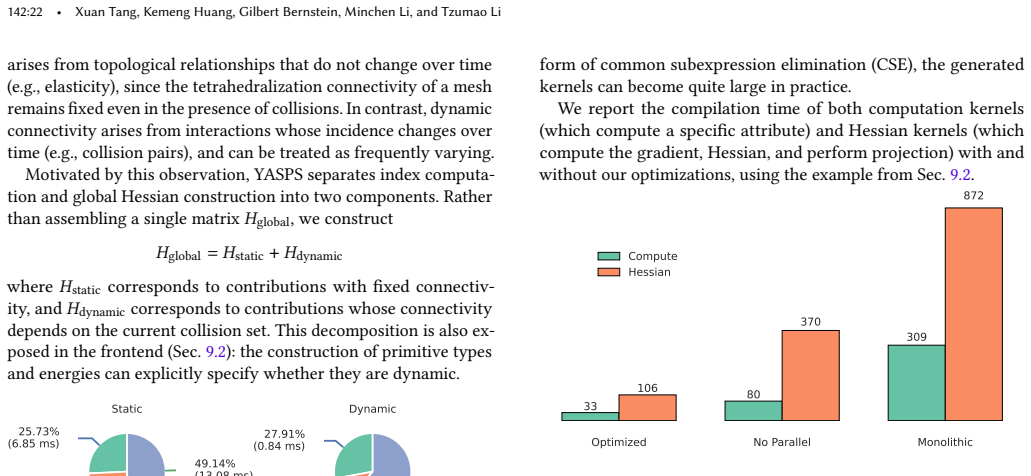
- Hessian compression derived from the relational description yields near 10x faster conjugate-gradient iterations.
- Global gradient and Hessian sparsity patterns and block layouts are derived automatically from the same relational program.
- The framework produces complete JIT-compiled CUDA kernels for energy evaluation, derivatives, assembly, and solving across mixed rigid-deformable and layered-contact examples.
Where Pith is reading between the lines
- The same relational representation could be applied to other energy-minimization simulators that currently rely on hand-specialized kernels.
- Automatic derivation of sparsity and block layout may reduce the engineering cost of porting new contact models to GPU.
- Reusing intermediate Jacobians across the second-order procedure could be generalized to additional higher-order quantities if needed.
Load-bearing premise
The overhead of the dedicated differentiation rules for JOIN and UNION plus the Jacobian-reusing second-order procedure stays low enough to remain competitive with hand-written specialized kernels.
What would settle it
A direct comparison in which, for an identical new energy or parameterization, the automatically generated YASPS kernels take more than a small constant factor longer per iteration than an equivalent hand-written CUDA implementation on the same hardware.
Figures
























read the original abstract
Incremental Potential Contact (IPC) enables robust, contact-rich simulation by casting elasticity and contact as a single energy minimization problem, but high-performance IPC pipelines are typically built from specialized kernels and assembly logic tied to fixed energies, primitive types, and parameterizations, making extensions costly and combinatorial. We present YASPS, a GPU-oriented framework that removes this extensibility bottleneck by making structure explicit in a differentiable intermediate representation. YASPS introduces two first-class relational operators: JOIN, which composes dependent quantities across user-declared relations (e.g., element-to-vertex connectivity), and UNION, which represents alternative parameterizations within a relation (e.g., mixing free vertices with affine-body or other parameterizations without fragmenting the program). Because JOIN and UNION are part of the symbolic program, YASPS differentiates through them using dedicated rules and an efficient second-order procedure that reuses intermediate Jacobians and reduces Hessian-projection cost. From the same relational description, YASPS derives the global gradient/Hessian sparsity and block layout, enabling structure-aware block-sparse storage and compression, and JIT-compiles CUDA kernels for evaluation, derivatives, assembly, and solving. Across IPC-style examples, including layered cloth-on-bunny, mixed rigid/deformable bunnies, and a caged deformation model, YASPS supports rapid front-end extensions with minimal back-end changes while achieving competitive end-to-end performance; its Hessian compression yields near 10x faster CG iterations in our benchmarks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces YASPS, a GPU-oriented symbolic framework for Incremental Potential Contact (IPC) simulation. It makes relational structure explicit via two first-class operators—JOIN (for composing dependent quantities across user-declared relations such as element-to-vertex connectivity) and UNION (for alternative parameterizations within a relation)—and supplies dedicated first-order differentiation rules together with an efficient second-order procedure that reuses intermediate Jacobians to reduce Hessian-projection cost. From the same relational description the framework derives global gradient/Hessian sparsity and block layout, enables structure-aware block-sparse storage and compression, and JIT-compiles CUDA kernels for evaluation, derivatives, assembly and solving. Across IPC-style examples the authors claim that YASPS supports rapid front-end extensions with minimal back-end changes while delivering competitive end-to-end performance, with Hessian compression yielding near 10× faster CG iterations.
Significance. If the performance claims hold, the work would meaningfully lower the engineering cost of extending high-performance IPC pipelines by decoupling relational structure from hand-written kernels while preserving efficiency through symbolic differentiation and structure-aware compilation. Such a framework could accelerate research on contact-rich simulation in graphics.
major comments (2)
- [Abstract] Abstract: the central claim that the dedicated first-order rules for JOIN/UNION together with the second-order Jacobian-reuse procedure produce end-to-end runtimes competitive with specialized kernels is load-bearing, yet the manuscript supplies no per-component timing breakdown (symbolic traversal cost, Jacobian-reuse savings, projection cost, assembly overhead) that would confirm the net overhead remains modest.
- [Abstract] Abstract: the reported “near 10× faster CG iterations” from Hessian compression is presented without a description of the compression algorithm, the baseline solver configuration, or the precise benchmark conditions, preventing assessment of whether the speedup is attributable to the relational representation or to other implementation choices.
minor comments (1)
- [Abstract] The abstract refers to “our benchmarks” without stating the hardware platform, problem sizes, or exact comparison baselines used for the end-to-end timing and CG measurements.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The two major comments correctly identify that the abstract's performance claims would benefit from additional supporting details to allow readers to fully assess the contributions. We address each point below and commit to revisions that strengthen the manuscript without altering its core claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the dedicated first-order rules for JOIN/UNION together with the second-order Jacobian-reuse procedure produce end-to-end runtimes competitive with specialized kernels is load-bearing, yet the manuscript supplies no per-component timing breakdown (symbolic traversal cost, Jacobian-reuse savings, projection cost, assembly overhead) that would confirm the net overhead remains modest.
Authors: We agree that isolating the costs of symbolic traversal, Jacobian reuse, Hessian projection, and assembly would make the competitiveness claim more transparent. The current manuscript reports aggregate end-to-end timings and overall speedups relative to hand-written baselines, but does not decompose the symbolic overheads. In the revised version we will add a dedicated timing table (likely in Section 5 or a new subsection) that breaks down these components across the reported benchmarks, allowing readers to verify that the net overhead of the relational representation remains modest. revision: yes
-
Referee: [Abstract] Abstract: the reported “near 10× faster CG iterations” from Hessian compression is presented without a description of the compression algorithm, the baseline solver configuration, or the precise benchmark conditions, preventing assessment of whether the speedup is attributable to the relational representation or to other implementation choices.
Authors: The referee is right that the abstract alone does not supply enough context for the 10× CG claim. The manuscript body (Section 4.3) describes the block-sparse compression derived from the relational structure and compares against an uncompressed block-sparse CG baseline on the same scenes; however, these details are not summarized in the abstract. We will revise the abstract to briefly indicate the compression method, the baseline (uncompressed block-sparse CG with identical solver tolerances), and the benchmark conditions (specific IPC examples and iteration counts), while keeping the abstract concise. This change will make the attribution to the relational representation clearer. revision: yes
Circularity Check
No circularity; framework presented as implementation technique without self-referential derivations
full rationale
The paper introduces a GPU-oriented symbolic framework using relational operators JOIN and UNION, dedicated differentiation rules, Jacobian reuse for second-order derivatives, and structure-aware Hessian compression. No equations, fitted parameters, or predictions are shown that reduce to their own inputs by construction. Performance claims rest on benchmark results rather than any derivation chain that loops back to fitted quantities or self-citations. The work is self-contained as an engineering contribution with no load-bearing self-citation or ansatz smuggling identified in the provided text.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Teseo Schneider and Jérémie Dumas and Xifeng Gao and Denis Zorin and Daniele Panozzo , title =
-
[2]
and Lin, Huancheng and Komura, Taku , year=
Huang, Kemeng and Chitalu, Floyd M. and Lin, Huancheng and Komura, Taku , year=. GIPC: Fast and Stable Gauss-Newton Optimization of IPC Barrier Energy , volume=. ACM Transactions on Graphics , publisher=. doi:10.1145/3643028 , number=
-
[3]
Huang, Kemeng and Lu, Xinyu and Lin, Huancheng and Komura, Taku and Li, Minchen , title =. 2025 , publisher =. doi:10.1145/3735126 , journal =
-
[4]
Fernández-Fernández, José Antonio and Lange, Ralph and Laible, Stefan and Arras, Kai O. and Bender, Jan , booktitle=. STARK: A Unified Framework for Strongly Coupled Simulation of Rigid and Deformable Bodies with Frictional Contact , year=
-
[5]
SymX: Energy-based Simulation from Symbolic Expressions , year =
Fern\'. SymX: Energy-based Simulation from Symbolic Expressions , year =. ACM Trans. Graph. , month = oct, articleno =. doi:10.1145/3764928 , abstract =
-
[6]
Herholz, Philipp and Stuyck, Tuur and Kavan, Ladislav , title =. ACM Trans. Graph. , month = nov, articleno =. 2024 , issue_date =. doi:10.1145/3687986 , abstract =
-
[7]
Schmidt, P. and Born, J. and Bommes, D. and Campen, M. and Kobbelt, L. , title =. Computer Graphics Forum , volume =. doi:https://doi.org/10.1111/cgf.14607 , url =. https://onlinelibrary.wiley.com/doi/pdf/10.1111/cgf.14607 , abstract =
-
[8]
Yu, Chang and Xu, Yi and Kuang, Ye and Hu, Yuanming and Liu, Tiantian , title =. ACM Trans. Graph. , month = nov, articleno =. 2022 , issue_date =. doi:10.1145/3550454.3555430 , abstract =
-
[9]
DiffTaichi: Differentiable Programming for Physical Simulation , author=. 2020 , eprint=
work page 2020
-
[10]
PyTorch: An Imperative Style, High-Performance Deep Learning Library , author=. 2019 , eprint=
work page 2019
-
[11]
Bernstein, Gilbert Louis and Shah, Chinmayee and Lemire, Crystal and Devito, Zachary and Fisher, Matthew and Levis, Philip and Hanrahan, Pat , title =. 2016 , pages =
work page 2016
-
[12]
ACM Transactions on Graphics (TOG) , volume=
Simit: A language for physical simulation , author=. ACM Transactions on Graphics (TOG) , volume=. 2016 , publisher=
work page 2016
-
[13]
Li, Minchen and Ferguson, Zachary and Schneider, Teseo and Langlois, Timothy and Zorin, Denis and Panozzo, Daniele and Jiang, Chenfanfu and Kaufman, Danny M. , title =. ACM Trans. Graph. , month = aug, articleno =. 2020 , issue_date =. doi:10.1145/3386569.3392425 , abstract =
-
[14]
Affine Body Dynamics: Fast, Stable & Intersection-free Simulation of Stiff Materials , author=. 2022 , eprint=
work page 2022
-
[15]
ACM Transactions on Graphics (TOG) , volume=
Codimensional incremental potential contact , author=. ACM Transactions on Graphics (TOG) , volume=. 2021 , publisher=
work page 2021
-
[16]
ACM Transactions on Graphics , volume=
Intersection-free rigid body dynamics , author=. ACM Transactions on Graphics , volume=
-
[17]
ACM Transactions on Graphics (TOG) , volume=
A unified newton barrier method for multibody dynamics , author=. ACM Transactions on Graphics (TOG) , volume=. 2022 , publisher=
work page 2022
-
[18]
Hybrid continuum--discrete simulation of granular impact dynamics , author=. Acta Geotechnica , volume=. 2022 , publisher=
work page 2022
-
[19]
ACM SIGGRAPH 2024 Conference Papers , pages=
A dynamic duo of finite elements and material points , author=. ACM SIGGRAPH 2024 Conference Papers , pages=
work page 2024
-
[20]
Computer Methods in Applied Mechanics and Engineering , volume=
BFEMP: Interpenetration-free MPM--FEM coupling with barrier contact , author=. Computer Methods in Applied Mechanics and Engineering , volume=. 2022 , publisher=
work page 2022
-
[21]
ACM Transactions on Graphics (TOG) , volume=
A contact proxy splitting method for Lagrangian solid-fluid coupling , author=. ACM Transactions on Graphics (TOG) , volume=. 2023 , publisher=
work page 2023
-
[22]
Baraff, David and Witkin, Andrew , title =. 1998 , isbn =. doi:10.1145/280814.280821 , booktitle =
-
[23]
Numerical algorithms: methods for computer vision, machine learning, and graphics , author=. 2015 , publisher=
work page 2015
-
[24]
ACM Transactions on Graphics (TOG) , volume=
A GPU-based multilevel additive schwarz preconditioner for cloth and deformable body simulation , author=. ACM Transactions on Graphics (TOG) , volume=. 2022 , publisher=
work page 2022
-
[25]
Surface-Filling Curve Flows via Implicit Medial Axes , year =
Noma, Yuta and Sell\'. Surface-Filling Curve Flows via Implicit Medial Axes , year =. ACM Trans. Graph. , month = jul, articleno =. doi:10.1145/3658158 , abstract =
- [26]
-
[27]
Logg, Anders and Mardal, Kent-Andre and Wells, Garth N. , journal =. Automated solution of differential equations by the. 2012 , pages =
work page 2012
-
[28]
ACM Transactions on Mathematical Software , volume =
Unified Form Language: A domain-specific language for weak formulations of partial differential equations , author =. ACM Transactions on Mathematical Software , volume =. 2014 , pages =
work page 2014
-
[29]
Warp: A High-Performance Python Framework for GPU Simulation and Graphics , author =. 2022 , note =
work page 2022
-
[30]
Herholz, Philipp and Tang, Xuan and Schneider, Teseo and Kamil, Shoaib and Panozzo, Daniele and Sorkine-Hornung, Olga , title =. ACM Trans. Graph. , month = may, articleno =. 2022 , issue_date =. doi:10.1145/3520484 , abstract =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.