RED: Adaptive Real-Time DAG Scheduling for Robotic Inference under Environmental Dynamics
Pith reviewed 2026-06-30 15:58 UTC · model grok-4.3
The pith
A deadline-aware scheduler for robotic multi-task inference adapts to environmental changes while preserving end-to-end timing guarantees.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
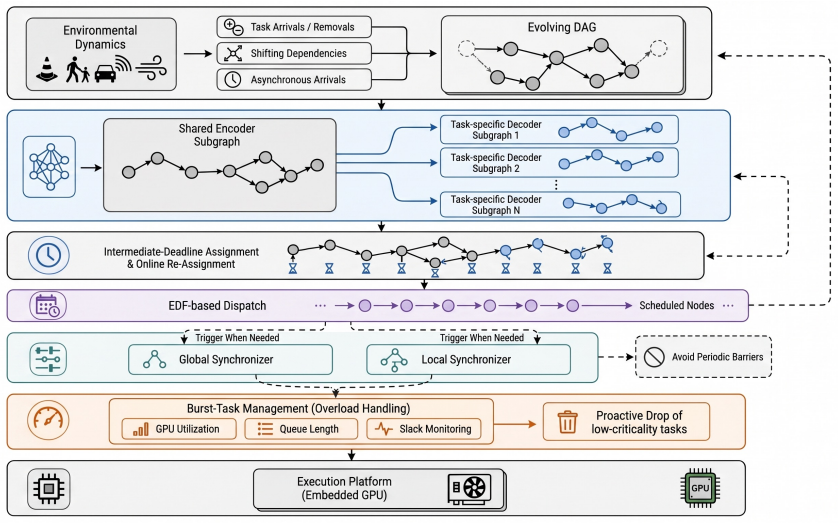
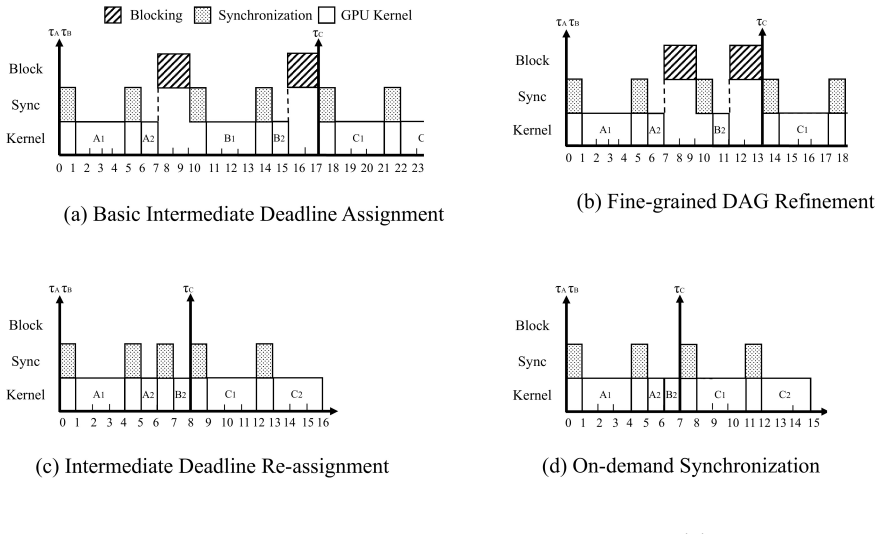
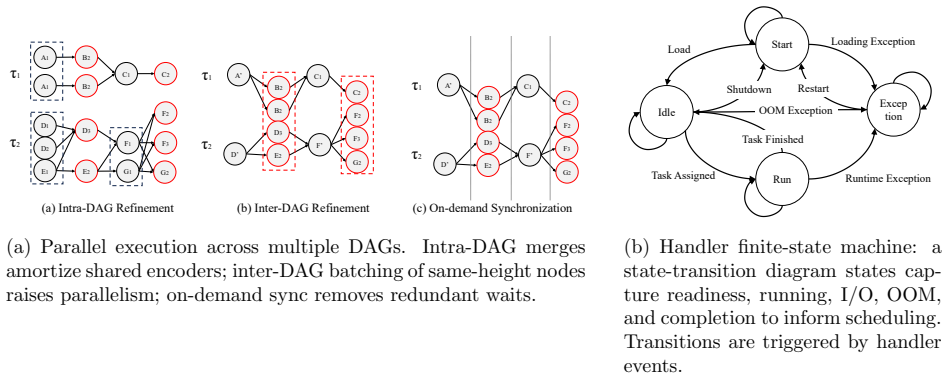
RED is a real-time scheduling framework for multi-task deep neural network workloads on resource-constrained robotic platforms that adapts to Robotic Environmental Dynamics while preserving end-to-end timing guarantees under modeling assumptions. The core is a deadline-aware scheduler that assigns intermediate sub-deadlines to accommodate evolving computation graphs and asynchronous inference induced by unpredictable conditions. The framework supports flexible deployment of MIMONet through workload refinement and graph-reconstruction that aligns the structure with schedulability requirements.
What carries the argument
The deadline-aware scheduler assigning intermediate sub-deadlines to accommodate evolving computation graphs and asynchronous inference, combined with MIMONet workload refinement and graph-reconstruction procedure.
If this is right
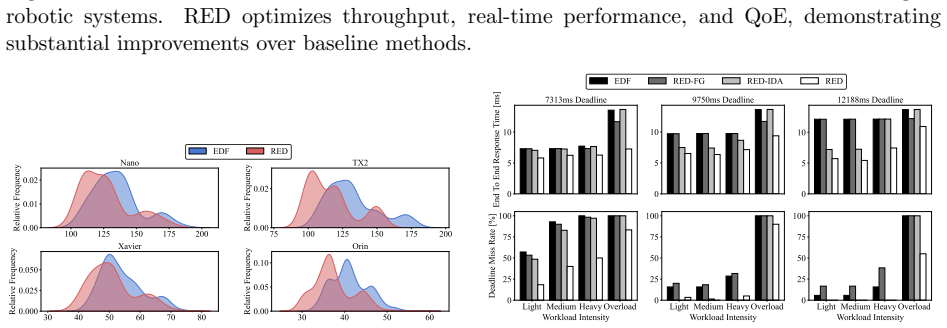
- Consistent gains in throughput over existing methods.
- Improved deadline satisfaction rates.
- Greater robustness to interference from environmental changes.
- Better adaptability while maintaining real-time performance.
- Lower runtime overhead on platforms like NVIDIA Jetson and Apple M-series.
Where Pith is reading between the lines
- Such adaptive scheduling could be applied to other embedded AI systems facing variable workloads, like autonomous vehicles or smart sensors.
- Hardware designers might optimize for shared-parameter networks like MIMONet to leverage these refinements.
- Further tests could explore scaling to multi-robot coordination scenarios with shared resources.
Load-bearing premise
The modeling assumptions hold such that the deadline-aware scheduler can preserve end-to-end timing guarantees even as computation graphs evolve and inference becomes asynchronous due to unpredictable conditions.
What would settle it
A test run on the evaluated platforms where, despite the modeling assumptions, the system misses end-to-end deadlines when the workload structure changes due to simulated environmental dynamics.
Figures

read the original abstract
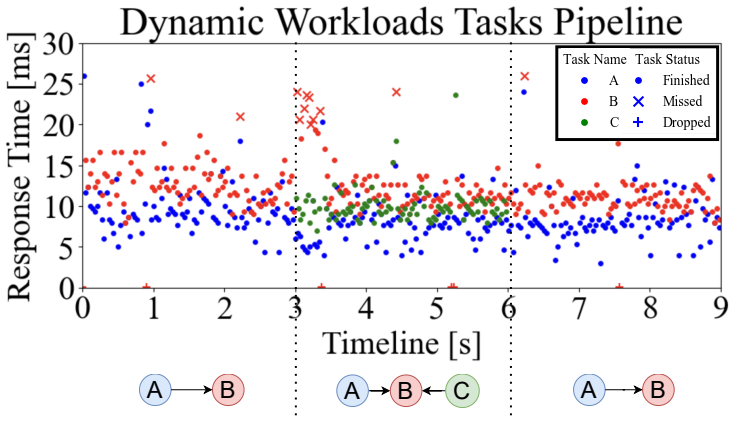
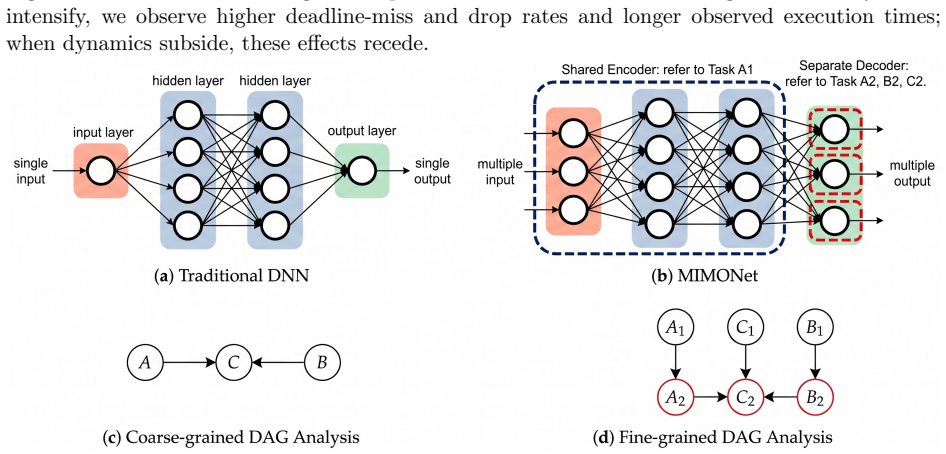
Robots deployed in dynamic environments must contend with environment-driven changes that reshape computation at runtime: new tasks may appear, precedence relations can shift, and overall workload structure evolves, all of which degrade performance, especially when multi-task inference is required under tight resource and real-time budgets. We present RED, a real-time scheduling framework for multi-task deep neural network workloads on resource-constrained robotic platforms that adapts to Robotic Environmental Dynamics (RED) while preserving end-to-end timing guarantees under modeling assumptions. The core of RED is a deadline-aware scheduler that assigns intermediate sub-deadlines, allowing it to accommodate evolving computation graphs and asynchronous inference induced by unpredictable conditions. The framework also supports flexible deployment of MIMONet (multi-input multi-output neural networks), commonly used in multi-tasking robots to alleviate memory pressure through weight sharing. RED explicitly leverages this shared-parameter property via a workload refinement and graph-reconstruction procedure that aligns MIMONet structure with schedulability requirements, improving compatibility and efficiency. We implement RED on NVIDIA Jetson family platforms and on an Apple M-series MacBook and evaluate it on navigation-oriented workloads representative of real robotic scenarios. Experiments show consistent gains over existing methods in throughput, deadline satisfaction, robustness to interference, adaptability, and runtime overhead.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents RED, a real-time scheduling framework for multi-task deep neural network workloads on resource-constrained robotic platforms. It adapts to Robotic Environmental Dynamics by accommodating evolving computation graphs and asynchronous inference via a deadline-aware scheduler that assigns intermediate sub-deadlines, while preserving end-to-end timing guarantees under modeling assumptions. The framework supports MIMONet deployment through workload refinement and graph reconstruction to align with schedulability needs, and is implemented on NVIDIA Jetson platforms and Apple M-series hardware with evaluations on navigation-oriented robotic workloads showing gains in throughput, deadline satisfaction, robustness to interference, adaptability, and runtime overhead.
Significance. If the modeling assumptions prove realistic for robotic scenarios and the experimental results are reproducible with appropriate statistical validation, the work could meaningfully advance adaptive real-time scheduling for dynamic multi-task inference in robotics, a practical area where existing methods often struggle with evolving DAGs and resource constraints.
minor comments (2)
- [Abstract] Abstract: The acronym RED is overloaded, referring both to the proposed framework and to 'Robotic Environmental Dynamics'; this risks confusion and should be disambiguated in the title, abstract, and introduction.
- [Abstract] Abstract: Claims of 'consistent gains' and 'improving compatibility and efficiency' are stated without quantitative values, baselines, or metrics; the full manuscript should supply these details for evaluation.
Simulated Author's Rebuttal
We thank the referee for their review of our manuscript on RED. We appreciate the recognition of the framework's potential to advance adaptive real-time scheduling for dynamic multi-task inference in robotics. The recommendation is listed as uncertain, but no specific major comments are enumerated in the report. We therefore provide no point-by-point responses below and stand ready to address any additional points the referee may wish to raise.
Circularity Check
No significant circularity detected
full rationale
The abstract and description introduce RED as a scheduling framework using a deadline-aware scheduler for evolving DAGs and MIMONet refinement, with timing guarantees scoped explicitly to modeling assumptions. No equations, parameter fits, self-citations, or derivations are presented that reduce any claimed prediction or result to its inputs by construction. The framework is described at a high level without self-definitional loops or renamed known results. This matches the reader's assessment of no visible circularity signals, making the derivation self-contained against the supplied text.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Com- mongraph: Graph analytics on evolving data
Mahbod Afarin, Chao Gao, Shafiur Rahman, Nael Abu-Ghazaleh, and Rajiv Gupta. Com- mongraph: Graph analytics on evolving data. InProceedings of the 28th ACM International Conference on Architectural Support for Programming Languages and Operating Systems, Vol- ume 2, ASPLOS 2023, page 133–145, New York, NY, USA, 2023. Association for Computing Machinery
2023
-
[2]
Com- mongraph: Graph analytics on evolving data (abstract)
Mahbod Afarin, Chao Gao, Shafiur Rahman, Nael Abu-Ghazaleh, and Rajiv Gupta. Com- mongraph: Graph analytics on evolving data (abstract). InProceedings of the 2023 ACM Workshop on Highlights of Parallel Computing, HOPC ’23, page 1–2, New York, NY, USA,
2023
-
[3]
Association for Computing Machinery
-
[4]
Exact response-time bounds of periodic dag tasks under server-based global scheduling
Shareef Ahmed and James H Anderson. Exact response-time bounds of periodic dag tasks under server-based global scheduling. In2022 IEEE Real-Time Systems Symposium (RTSS), pages 447–459. IEEE, 2022
2022
-
[5]
The federated scheduling of systems of conditional sporadic dag tasks
Sanjoy Baruah. The federated scheduling of systems of conditional sporadic dag tasks. In 2015 International Conference on Embedded Software (EMSOFT), pages 1–10. IEEE, 2015
2015
-
[6]
Predjoule: A timing-predictable energy optimization framework for deep neural networks
Soroush Bateni, Husheng Zhou, Yuankun Zhu, and Cong Liu. Predjoule: A timing-predictable energy optimization framework for deep neural networks. In2018 IEEE Real-Time Systems Symposium (RTSS), pages 107–118. IEEE, 2018
2018
-
[7]
Response time analysis for prioritized dag task with mutually exclusive vertices
Ran Bi, Qingqiang He, Jinghao Sun, Zhenyu Sun, Zhishan Guo, Nan Guan, and Guozhen Tan. Response time analysis for prioritized dag task with mutually exclusive vertices. In 2022 IEEE Real-Time Systems Symposium (RTSS), pages 460–473. IEEE, 2022. 30
2022
-
[8]
Brandenburg
Tobias Blaß, Daniel Casini, Sergey Bozhko, and Bj¨ orn B. Brandenburg. A ROS 2 response- time analysis exploiting starvation freedom and execution-time variance. In42nd IEEE Real- Time Systems Symposium, RTSS 2021, Dortmund, Germany, December 7-10, 2021, pages 41–53. IEEE, 2021
2021
-
[9]
Brandenburg
Tobias Blaß, Arne Hamann, Ralph Lange, Dirk Ziegenbein, and Bj¨ orn B. Brandenburg. Automatic latency management for ROS 2: Benefits, challenges, and open problems. In 27th IEEE Real-Time and Embedded Technology and Applications Symposium, RTAS 2021, Nashville, TN, USA, May 18-21, 2021, pages 264–277. IEEE, 2021
2021
-
[10]
End to End Learning for Self-Driving Cars
Mariusz Bojarski, Davide Del Testa, Daniel Dworakowski, Bernhard Firner, Beat Flepp, Prasoon Goyal, Lawrence D Jackel, Mathew Monfort, Urs Muller, Jiakai Zhang, et al. End to end learning for self-driving cars.arXiv preprint arXiv:1604.07316, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[11]
Adaptive neural net- works for efficient inference
Tolga Bolukbasi, Joseph Wang, Ofer Dekel, and Venkatesh Saligrama. Adaptive neural net- works for efficient inference. InProceedings of ACM International Conference on Machine Learning, pages 527–536, New York, NY, USA, 2017. ACM
2017
-
[12]
Fully automatic and real-time microrobot detection and tracking based on ultrasound imaging using deep learning
Karim Botros, Mohammad Alkhatib, David Folio, and Antoine Ferreira. Fully automatic and real-time microrobot detection and tracking based on ultrasound imaging using deep learning. In2022 International Conference on Robotics and Automation (ICRA), pages 9763–9768. IEEE, 2022
2022
-
[13]
Alan Burns and Robert I. Davis. A survey of research into mixed criticality systems.ACM Computing Surveys, 50(6), 2017
2017
-
[14]
Comparative evaluation of the robustness of dag scheduling heuristics.Grid Computing: Achievements and Prospects, pages 73–84, 2008
Louis-Claude Canon, Emmanuel Jeannot, Rizos Sakellariou, and Wei Zheng. Comparative evaluation of the robustness of dag scheduling heuristics.Grid Computing: Achievements and Prospects, pages 73–84, 2008
2008
-
[15]
Multitask learning.Machine learning, 28(1):41–75, 1997
Rich Caruana. Multitask learning.Machine learning, 28(1):41–75, 1997
1997
-
[16]
Hanlin Chen, Simin Chen, Wenyu Li, Wei Yang, and Yiheng Feng. Impact analysis of inference time attack of perception sensors on autonomous vehicles.arXiv preprint arXiv:2505.03850, 2025
-
[17]
Precise response time analysis for multiple dag tasks with intra-task priority assignment
Nan Chen, Shuai Zhao, Ian Gray, Alan Burns, Siyuan Ji, and Wanli Chang. Precise response time analysis for multiple dag tasks with intra-task priority assignment. In2023 IEEE 29th Real-Time and Embedded Technology and Applications Symposium (RTAS), pages 174–184. IEEE, 2023
2023
-
[18]
Nmtsloth: understanding and testing efficiency degradation of neural machine translation systems
Simin Chen, Cong Liu, Mirazul Haque, Zihe Song, and Wei Yang. Nmtsloth: understanding and testing efficiency degradation of neural machine translation systems. InProceedings of the 30th ACM Joint European Software Engineering Conference and Symposium on the Foundations of Software Engineering, pages 1148–1160, 2022
2022
-
[19]
Simin Chen, Jinjun Peng, Yixin He, Junfeng Yang, and Baishakhi Ray. Your compiler is back- dooring your model: Understanding and exploiting compilation inconsistency vulnerabilities in deep learning compilers.arXiv preprint arXiv:2509.11173, 2025
-
[20]
Dycodeeval: Dynamic benchmarking of reasoning capabilities in code large language models under data contamination
Simin Chen, Pranav Pusarla, and Baishakhi Ray. Dycodeeval: Dynamic benchmarking of reasoning capabilities in code large language models under data contamination. InForty- second International Conference on Machine Learning. 31
-
[21]
Nicgslowdown: Evaluating the efficiency robustness of neural image caption generation models
Simin Chen, Zihe Song, Mirazul Haque, Cong Liu, and Wei Yang. Nicgslowdown: Evaluating the efficiency robustness of neural image caption generation models. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 15365–15374, 2022
2022
-
[22]
Dycl: Dynamic neural network compilation via program rewriting and graph optimization
Simin Chen, Shiyi Wei, Cong Liu, and Wei Yang. Dycl: Dynamic neural network compilation via program rewriting and graph optimization. InProceedings of the 32nd ACM SIGSOFT International Symposium on Software Testing and Analysis, pages 614–626, 2023
2023
-
[23]
Tan, and Haizhou Li
Yiming Chen, Simin Chen, Zexin Li, Wei Yang, Cong Liu, Robby T. Tan, and Haizhou Li. Dynamic transformers provide a false sense of efficiency. In Anna Rogers, Jordan L. Boyd-Graber, and Naoaki Okazaki, editors,Proceedings of the 61st Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), ACL 2023, Toronto, Canada, July 9-...
2023
-
[24]
Yiming Chen, Xianghu Yue, Xiaoxue Gao, Chen Zhang, Luis Fernando D’Haro, Robby T Tan, and Haizhou Li. Beyond single-audio: Advancing multi-audio processing in audio large language models.arXiv preprint arXiv:2409.18680, 2024
-
[25]
VoiceBench: Benchmarking LLM-Based Voice Assistants
Yiming Chen, Xianghu Yue, Chen Zhang, Xiaoxue Gao, Robby T Tan, and Haizhou Li. Voicebench: Benchmarking llm-based voice assistants.arXiv preprint arXiv:2410.17196, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[26]
Yiming Chen, Chen Zhang, Danqing Luo, Luis Fernando D’Haro, Robby T Tan, and Haizhou Li. Unveiling the achilles’ heel of nlg evaluators: A unified adversarial framework driven by large language models.arXiv preprint arXiv:2405.14646, 2024
-
[27]
Yiming Chen, Yan Zhang, Chen Zhang, Grandee Lee, Ran Cheng, and Haizhou Li. Revisiting self-training for few-shot learning of language model.arXiv preprint arXiv:2110.01256, 2021
-
[28]
Picas: New design of priority-driven chain-aware scheduling for ROS2
Hyunjong Choi, Yecheng Xiang, and Hyoseung Kim. Picas: New design of priority-driven chain-aware scheduling for ROS2. In27th IEEE Real-Time and Embedded Technology and Applications Symposium, RTAS 2021, Nashville, TN, USA, May 18-21, 2021, pages 251–263. IEEE, 2021
2021
-
[29]
Compressing neural networks using the variational information bottleneck
Bin Dai, Chen Zhu, Baining Guo, and David Wipf. Compressing neural networks using the variational information bottleneck. InInternational Conference on Machine Learning, pages 1135–1144. PMLR, 2018
2018
-
[30]
Imagenet: A large- scale hierarchical image database
Jia Deng, Wei Dong, Richard Socher, Li-Jia Li, Kai Li, and Li Fei-Fei. Imagenet: A large- scale hierarchical image database. In2009 IEEE conference on computer vision and pattern recognition, pages 248–255. Ieee, 2009
2009
-
[31]
Nestdnn: Resource-aware multi-tenant on-device deep learning for continuous mobile vision
Biyi Fang, Xiao Zeng, and Mi Zhang. Nestdnn: Resource-aware multi-tenant on-device deep learning for continuous mobile vision. InProceedings of ACM Annual International Conference on Mobile Computing and Networking, pages 115–127, 2018
2018
-
[32]
Llmeffichecker: Understanding and testing efficiency degradation of large language models.ACM Transactions on Software Engineering and Methodology, 33(7):1–38, 2024
Xiaoning Feng, Xiaohong Han, Simin Chen, and Wei Yang. Llmeffichecker: Understanding and testing efficiency degradation of large language models.ACM Transactions on Software Engineering and Methodology, 33(7):1–38, 2024. 32
2024
-
[33]
Mega evolving graph accelerator
Chao Gao, Mahbod Afarin, Shafiur Rahman, Nael Abu-Ghazaleh, and Rajiv Gupta. Mega evolving graph accelerator. InProceedings of the 56th Annual IEEE/ACM International Symposium on Microarchitecture, MICRO ’23, page 310–323, New York, NY, USA, 2023. Association for Computing Machinery
2023
-
[34]
Chao Gao and Sai Qian Zhang. Dlora: Distributed parameter-efficient fine-tuning solution for large language model.arXiv preprint arXiv:2404.05182, 2024
-
[35]
Are we ready for autonomous driving? the kitti vision benchmark suite
Andreas Geiger, Philip Lenz, and Raquel Urtasun. Are we ready for autonomous driving? the kitti vision benchmark suite. In2012 IEEE conference on computer vision and pattern recognition, pages 3354–3361. IEEE, 2012
2012
-
[36]
Enabling low-cost secure computing on untrusted in-memory architectures
Sahar Ghoflsaz Ghinani, Jingyao Zhang, and Elaheh Sadredini. Enabling low-cost secure computing on untrusted in-memory architectures
-
[37]
D3: a dynamic deadline-driven approach for building autonomous vehicles
Ionel Gog, Sukrit Kalra, Peter Schafhalter, Joseph E Gonzalez, and Ion Stoica. D3: a dynamic deadline-driven approach for building autonomous vehicles. InProceedings of the Seventeenth European Conference on Computer Systems, pages 453–471, 2022
2022
-
[38]
Pylot: A modular platform for exploring latency-accuracy tradeoffs in autonomous vehicles
Ionel Gog, Sukrit Kalra, Peter Schafhalter, Matthew A Wright, Joseph E Gonzalez, and Ion Stoica. Pylot: A modular platform for exploring latency-accuracy tradeoffs in autonomous vehicles. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 8806–8813. IEEE, 2021
2021
-
[39]
Ronald L. Graham. Bounds on multiprocessing timing anomalies.SIAM journal on Applied Mathematics, 17(2):416–429, 1969
1969
-
[40]
Parameter-Efficient Fine-Tuning for Large Models: A Comprehensive Survey
Zeyu Han, Chao Gao, Jinyang Liu, Sai Qian Zhang, et al. Parameter-efficient fine-tuning for large models: A comprehensive survey.arXiv preprint arXiv:2403.14608, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[41]
Bounding the response time of dag tasks using long paths
Qingqiang He, Nan Guan, Mingsong Lv, Xu Jiang, and Wanli Chang. Bounding the response time of dag tasks using long paths. In2022 IEEE Real-Time Systems Symposium (RTSS), pages 474–486. IEEE, 2022
2022
-
[42]
Sihong He, Shuo Han, and Fei Miao. Robust electric vehicle balancing of autonomous mobility-on-demand system: A multi-agent reinforcement learning approach.arXiv preprint arXiv:2307.16228, 2023
-
[43]
Robust multi-agent reinforcement learning with state uncertainty.Transactions on Machine Learning Research, 2023
Sihong He, Songyang Han, Sanbao Su, Shuo Han, Shaofeng Zou, and Fei Miao. Robust multi-agent reinforcement learning with state uncertainty.Transactions on Machine Learning Research, 2023
2023
-
[44]
Sihong He, Yue Wang, Shuo Han, Shaofeng Zou, and Fei Miao. A robust and constrained multi-agent reinforcement learning framework for electric vehicle amod systems.arXiv preprint arXiv:2209.08230, 2022
-
[45]
On-device deep multi-task inference via multi-task zipping.IEEE Transactions on Mobile Computing, pages 1–1, 2021
Xiaoxi He, Xu Wang, Zimu Zhou, Jiahang Wu, Zheng Yang, and Lothar Thiele. On-device deep multi-task inference via multi-task zipping.IEEE Transactions on Mobile Computing, pages 1–1, 2021
2021
-
[46]
Multi-task zipping via layer-wise neuron sharing
Xiaoxi He, Zimu Zhou, and Lothar Thiele. Multi-task zipping via layer-wise neuron sharing. InAdvances in Neural Information Processing Systems, pages 6019–6029, 2018. 33
2018
-
[47]
Ros2 real-time classification and detection.https://github.com/ NVIDIA-AI-IOT/ros2_torch_trt, 2020
NVIDIA AI IOT. Ros2 real-time classification and detection.https://github.com/ NVIDIA-AI-IOT/ros2_torch_trt, 2020
2020
-
[48]
Pccl: Energy-efficient llm training with power-aware collective communication
Ziyang Jia, Laxmi N Bhuyan, and Daniel Wong. Pccl: Energy-efficient llm training with power-aware collective communication. In2024 IEEE 42nd International Conference on Computer Design (ICCD), pages 84–91. IEEE, 2024
2024
-
[49]
Fine-grained warm water cooling for improving datacenter economy
Weixiang Jiang, Ziyang Jia, Sirui Feng, Fangming Liu, and Hai Jin. Fine-grained warm water cooling for improving datacenter economy. InProceedings of the 46th International Symposium on Computer Architecture, pages 474–486, 2019
2019
-
[50]
Real-time scheduling of parallel tasks with tight deadlines.Journal of Systems Architecture, 108:101742, 2020
Xu Jiang, Nan Guan, Xiang Long, Yue Tang, and Qingqiang He. Real-time scheduling of parallel tasks with tight deadlines.Journal of Systems Architecture, 108:101742, 2020
2020
-
[51]
Semi-federated scheduling of parallel real- time tasks on multiprocessors
Xu Jiang, Nan Guan, Xiang Long, and Wang Yi. Semi-federated scheduling of parallel real- time tasks on multiprocessors. In2017 IEEE Real-Time Systems Symposium (RTSS), pages 80–91. IEEE, 2017
2017
-
[52]
Real-time scheduling and analysis of processing chains on multi-threaded executor in ROS 2
Xu Jiang, Dong Ji, Nan Guan, Ruoxiang Li, Yue Tang, and Yi Wang. Real-time scheduling and analysis of processing chains on multi-threaded executor in ROS 2. InIEEE Real-Time Systems Symposium, RTSS 2022, Houston, TX, USA, December 5-8, 2022, pages 27–39. IEEE, 2022
2022
-
[53]
Rt-mot: Confidence-aware real-time scheduling framework for multi-object tracking tasks
Donghwa Kang, Seunghoon Lee, Hoon Sung Chwa, Seung-Hwan Bae, Chang Mook Kang, Jinkyu Lee, and Hyeongboo Baek. Rt-mot: Confidence-aware real-time scheduling framework for multi-object tracking tasks. In2022 IEEE Real-Time Systems Symposium (RTSS), pages 318–330. IEEE, 2022
2022
-
[54]
Rt-swap: Addressing gpu memory bottlenecks for real-time multi-dnn inference
Woosung Kang, Jinkyu Lee, Youngmoon Lee, Sangeun Oh, Kilho Lee, and Hoon Sung Chwa. Rt-swap: Addressing gpu memory bottlenecks for real-time multi-dnn inference. In2024 IEEE 30th Real-Time and Embedded Technology and Applications Symposium (RTAS), pages 373–385. IEEE Computer Society, 2024
2024
-
[55]
Lalarand: Flexible layer-by-layer cpu/gpu scheduling for real-time dnn tasks
Woosung Kang, Kilho Lee, Jinkyu Lee, Insik Shin, and Hoon Sung Chwa. Lalarand: Flexible layer-by-layer cpu/gpu scheduling for real-time dnn tasks. In2021 IEEE Real-Time Systems Symposium (RTSS), pages 329–341. IEEE, 2021
2021
-
[56]
Hyoukjun Kwon, Krishnakumar Nair, Jamin Seo, Jason Yik, Debabrata Mohapatra, Dongyuan Zhan, Jinook Song, Peter Capak, Peizhao Zhang, Peter Vajda, et al. Xrbench: An extended reality (xr) machine learning benchmark suite for the metaverse.arXiv preprint arXiv:2211.08675, 2022
-
[57]
Towards safe, realistic testbed for robotic systems with human interaction
Bhoram Lee, Jonathan Brookshire, Rhys Yahata, and Supun Samarasekera. Towards safe, realistic testbed for robotic systems with human interaction. In2022 International Conference on Robotics and Automation (ICRA), pages 11280–11287. IEEE, 2022
2022
-
[58]
Fast and scalable in-memory deep multitask learning via neural weight virtualization
Seulki Lee and Shahriar Nirjon. Fast and scalable in-memory deep multitask learning via neural weight virtualization. InProceedings of ACM Annual International Conference on Mobile Systems, Applications, and Services, pages 175–190, 2020
2020
-
[59]
Outstanding paper award: Analysis of global edf for parallel tasks
Jing Li, Kunal Agrawal, Chenyang Lu, and Christopher Gill. Outstanding paper award: Analysis of global edf for parallel tasks. In2013 25th Euromicro Conference on Real-Time Systems, pages 3–13. IEEE, 2013. 34
2013
-
[60]
Analysis of federated and global scheduling for parallel real-time tasks
Jing Li, Jian Jia Chen, Kunal Agrawal, Chenyang Lu, Chris Gill, and Abusayeed Saiful- lah. Analysis of federated and global scheduling for parallel real-time tasks. In2014 26th Euromicro Conference on Real-Time Systems, pages 85–96. IEEE, 2014
2014
-
[61]
Worst- case time disparity analysis of message synchronization in ROS
Ruoxiang Li, Nan Guan, Xu Jiang, Zhishan Guo, Zheng Dong, and Mingsong Lv. Worst- case time disparity analysis of message synchronization in ROS. InIEEE Real-Time Systems Symposium, RTSS 2022, Houston, TX, USA, December 5-8, 2022, pages 40–52. IEEE, 2022
2022
-
[62]
Yufei Li, Yu Fu, Yue Dong, and Cong Liu. Mace: A hybrid llm serving system with colocated slo-aware continuous retraining alignment.arXiv preprint arXiv:2510.03283, 2025
-
[63]
White-box multi-objective adversarial attack on dialogue generation
Yufei Li, Zexin Li, Yingfan Gao, and Cong Liu. White-box multi-objective adversarial attack on dialogue generation. In Anna Rogers, Jordan L. Boyd-Graber, and Naoaki Okazaki, edi- tors,Proceedings of the 61st Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), ACL 2023, Toronto, Canada, July 9-14, 2023, pages 1778–1792...
2023
-
[64]
Rt-lm: Uncertainty-aware resource management for real-time inference of language models
Yufei Li, Zexin Li, Wei Yang, and Cong Liu. Rt-lm: Uncertainty-aware resource management for real-time inference of language models. In2023 IEEE Real-Time Systems Symposium (RTSS), pages 158–171. IEEE, 2023
2023
-
[65]
Yufei Li, Zexin Li, Yinglun Zhu, and Cong Liu. Lemix: Unified scheduling for llm training and inference on multi-gpu systems.arXiv preprint arXiv:2507.21276, 2025
-
[66]
Genie: Smart ros-based caching for connected autonomous robots.arXiv preprint arXiv:2402.19410, 2024
Zexin Li, Soroush Bateni, and Cong Liu. Genie: Smart ros-based caching for connected autonomous robots.arXiv preprint arXiv:2402.19410, 2024
-
[67]
Mi- monet: Multi-input multi-output on-device deep learning.arXiv preprint arXiv:2307.11962, 2023
Zexin Li, Xiaoxi He, Yufei Li, Shahab Nikkhoo, Wei Yang, Lothar Thiele, and Cong Liu. Mi- monet: Multi-input multi-output on-device deep learning.arXiv preprint arXiv:2307.11962, 2023
-
[68]
RED: A systematic real-time scheduling approach for robotic environmental dynamics
Zexin Li, Tao Ren, Xiaoxi He, and Cong Liu. RED: A systematic real-time scheduling approach for robotic environmental dynamics. In2023 IEEE Real-Time Systems Symposium (RTSS), pages 210–223. IEEE, 2023
2023
-
[69]
r 3: On-device real-time deep reinforcement learning for autonomous robotics
Zexin Li, Aritra Samanta, Yufei Li, Andrea Soltoggio, Hyoseung Kim, and Cong Liu. r 3: On-device real-time deep reinforcement learning for autonomous robotics. In2023 IEEE Real-Time Systems Symposium (RTSS), pages 131–144. IEEE, 2023
2023
-
[70]
Efficient algorithms for task mapping on heterogeneous cpu/gpu platforms for fast completion time.Journal of Systems Architecture, 114:101936, 2021
Zexin Li, Yuqun Zhang, Ao Ding, Husheng Zhou, and Cong Liu. Efficient algorithms for task mapping on heterogeneous cpu/gpu platforms for fast completion time.Journal of Systems Architecture, 114:101936, 2021
2021
-
[71]
Prentice Hall PTR, 2000
Jane WSW Liu.Real-time systems. Prentice Hall PTR, 2000
2000
-
[72]
Pullarao Maddu, Wayne Doherty, Ganesh Sistu, Isabelle Leang, Michal Uricar, Sumanth Chennupati, Hazem Rashed, Jonathan Horgan, Ciaran Hughes, and Senthil Yogamani. Fisheyemultinet: Real-time multi-task learning architecture for surround-view automated parking system.arXiv preprint arXiv:1912.11066, 2019
-
[73]
Deepeye: Resource efficient local execution of multiple deep vision models us- ing wearable commodity hardware
Akhil Mathur, Nicholas D Lane, Sourav Bhattacharya, Aidan Boran, Claudio Forlivesi, and Fahim Kawsar. Deepeye: Resource efficient local execution of multiple deep vision models us- ing wearable commodity hardware. InProceedings of ACM Annual International Conference on Mobile Systems, Applications, and Services, pages 68–81, 2017. 35
2017
-
[74]
Response-time analysis of conditional dag tasks in multiprocessor sys- tems
Alessandra Melani, Marko Bertogna, Vincenzo Bonifaci, Alberto Marchetti-Spaccamela, and Giorgio C Buttazzo. Response-time analysis of conditional dag tasks in multiprocessor sys- tems. In2015 27th Euromicro Conference on Real-Time Systems, pages 211–221. IEEE, 2015
2015
-
[75]
Pimbot: Policy and incentive manipulation for multi-robot reinforcement learning in social dilemmas
Shahab Nikkhoo, Zexin Li, Aritra Samanta, Yufei Li, and Cong Liu. Pimbot: Policy and incentive manipulation for multi-robot reinforcement learning in social dilemmas. In2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5630–
-
[76]
Duckiebot (db-j).https://get.duckietown.com/products/duckiebot-db21, 2022
NVIDIA. Duckiebot (db-j).https://get.duckietown.com/products/duckiebot-db21, 2022
2022
-
[77]
Sparkfun jetbot ai kit.https://www.sparkfun.com/products/18486, 2022
NVIDIA. Sparkfun jetbot ai kit.https://www.sparkfun.com/products/18486, 2022
2022
-
[78]
Waveshare jetbot ai kit.https://www.amazon.com/ Waveshare-JetBot-AI-Kit-Accessories/dp/B07V8JL4TF/, 2022
NVIDIA. Waveshare jetbot ai kit.https://www.amazon.com/ Waveshare-JetBot-AI-Kit-Accessories/dp/B07V8JL4TF/, 2022
2022
-
[79]
Virtual to Real Reinforcement Learning for Autonomous Driving
Xinlei Pan, Yurong You, Ziyan Wang, and Cewu Lu. Virtual to real reinforcement learning for autonomous driving.arXiv preprint arXiv:1704.03952, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[80]
A framework for real-time service-oriented architecture
Mark Panahi, Weiran Nie, and Kwei-Jay Lin. A framework for real-time service-oriented architecture. In2009 IEEE Conference on Commerce and Enterprise Computing, pages 460–
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.