RoboHitch: Learning Visual Affordance from Disordered Keypoints for Hitch Knots Tying
Pith reviewed 2026-06-30 13:27 UTC · model grok-4.3
The pith
Robots learn to tie hitch knots from unordered 3D points and camera images by predicting pick and place locations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
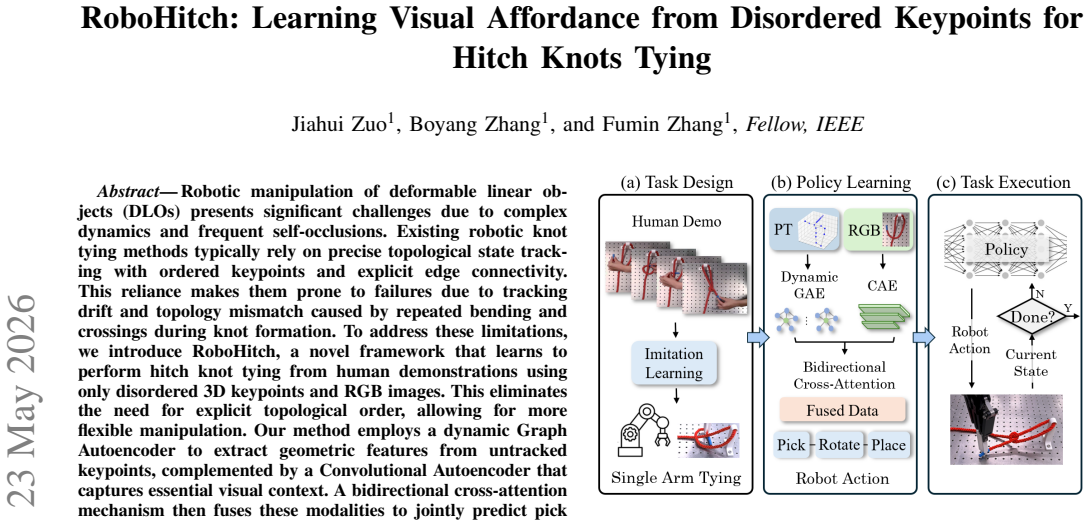
RoboHitch learns visual affordance for hitch knot tying from human demonstrations using only disordered 3D keypoints and RGB images. It employs a dynamic Graph Autoencoder to extract geometric features from untracked keypoints, a Convolutional Autoencoder to capture visual context, and bidirectional cross-attention to fuse the modalities for joint prediction of pick and place affordances, thereby enabling implicit reasoning about rope state without explicit topological order or tracking.
What carries the argument
Bidirectional cross-attention that fuses a dynamic Graph Autoencoder on disordered keypoints with a Convolutional Autoencoder on RGB images to predict pick and place affordances.
If this is right
- Hitch knots can be tied without maintaining ordered keypoint tracks or explicit edge connectivity.
- Self-occlusions during knot formation no longer cause topology mismatch failures.
- The same affordance predictor works across repeated bending and crossing sequences.
- Implicit state reasoning replaces the need for precise topological state tracking.
Where Pith is reading between the lines
- The same fusion approach could be tested on other knot types or deformable-object tasks such as coiling or threading.
- Removing the tracking step may allow simpler sensor setups in rope-manipulation systems.
- Collecting demonstrations on ropes of varying stiffness or thickness would reveal how far the implicit capture generalizes.
Load-bearing premise
Combining features from the graph autoencoder on unordered points and the convolutional autoencoder on images through cross-attention is enough to let the system figure out the rope configuration and choose correct actions without any explicit order or connectivity data.
What would settle it
Run the trained policy on a new rope configuration that produces self-occlusion patterns absent from the training demonstrations and record whether the robot consistently completes the hitch knot or fails at the same step across repeated trials.
Figures






read the original abstract
Robotic manipulation of deformable linear objects (DLOs) presents significant challenges due to complex dynamics and frequent self-occlusions. Existing robotic knot tying methods typically rely on precise topological state tracking with ordered keypoints and explicit edge connectivity. This reliance makes them prone to failures due to tracking drift and topology mismatch caused by repeated bending and crossings during knot formation.To address these limitations, we introduce RoboHitch, a novel framework that learns to perform hitch knot tying from human demonstrations using only disordered 3D keypoints and RGB images. This eliminates the need for explicit topological order, allowing for more flexible manipulation. Our method employs a dynamic Graph Autoencoder to extract geometric features from untracked keypoints, complemented by a Convolutional Autoencoder that captures essential visual context. A bidirectional cross-attention mechanism then fuses these modalities to jointly predict pick and place affordances, facilitating implicit reasoning about the rope's state and enabling knot tying under occlusion.Real-world experiments demonstrate the effectiveness and generalizability of our approach, successfully completing hitch knots in scenarios with self-occlusions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces RoboHitch, a framework for robotic hitch knot tying on deformable linear objects that operates from unordered 3D keypoints and RGB images. It extracts geometric features via a dynamic Graph Autoencoder, visual features via a Convolutional Autoencoder, fuses them with bidirectional cross-attention, and predicts pick/place affordances. The central claim is that this pipeline enables reliable knot tying under self-occlusion without explicit topological ordering or tracking, as demonstrated by real-world experiments.
Significance. If the experimental validation is rigorous, the work would be significant for DLO manipulation because it removes the requirement for ordered keypoints and explicit edge connectivity, a common source of tracking drift in knot-tying pipelines. The implicit-state approach via multimodal fusion could generalize to other occlusion-heavy deformable tasks.
major comments (2)
- [Abstract] Abstract: the assertion that 'real-world experiments demonstrate the effectiveness and generalizability' is unsupported by any quantitative results, success rates, trial counts, baselines, or error analysis, which is load-bearing for the central claim of reliable performance under self-occlusion.
- [Method] Method description: the claim that bidirectional cross-attention on the two autoencoder streams is 'sufficient to implicitly capture rope state' lacks supporting ablation studies or analysis showing that the fusion recovers the necessary ordering information; without this, the architecture's sufficiency for the stated task remains an untested assumption.
minor comments (1)
- Notation for the dynamic Graph Autoencoder and the cross-attention layers should be defined explicitly with equations or pseudocode to allow reproduction.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight opportunities to strengthen the presentation of quantitative evidence and the justification for our architectural design choices. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that 'real-world experiments demonstrate the effectiveness and generalizability' is unsupported by any quantitative results, success rates, trial counts, baselines, or error analysis, which is load-bearing for the central claim of reliable performance under self-occlusion.
Authors: We agree that the abstract would benefit from explicit quantitative support to substantiate the claim. While the full manuscript details the real-world experiments (including trial counts and success rates under occlusion) in the experimental evaluation section, the abstract itself remains high-level. We will revise the abstract to concisely incorporate key quantitative metrics from those experiments. revision: yes
-
Referee: [Method] Method description: the claim that bidirectional cross-attention on the two autoencoder streams is 'sufficient to implicitly capture rope state' lacks supporting ablation studies or analysis showing that the fusion recovers the necessary ordering information; without this, the architecture's sufficiency for the stated task remains an untested assumption.
Authors: The bidirectional cross-attention is intended to enable implicit learning of correspondences and state information by allowing each modality to attend to the other, without requiring explicit ordering or topology. The real-world knot-tying results under self-occlusion provide empirical support for the overall pipeline's effectiveness. We acknowledge that dedicated ablation studies isolating the fusion module were not present in the original submission. We will add a targeted discussion or limited analysis of the cross-attention contribution in the revised manuscript to address this point. revision: partial
Circularity Check
No significant circularity; method is supervised learning without derivations
full rationale
The paper describes a supervised learning pipeline trained on human demonstrations for affordance prediction. No equations, derivations, or parameter-fitting steps are presented that reduce predictions to inputs by construction. The central claim rests on real-world experimental validation rather than any self-referential mathematical structure. No self-citations or uniqueness theorems are invoked in a load-bearing way within the provided text.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A review of learning-based dynamics models for robotic manipulation,
B. Ai, S. Tian, H. Shi, Y . Wang, T. Pfaff, C. Tan, H. I. Christensen, H. Su, J. Wu, and Y . Li, “A review of learning-based dynamics models for robotic manipulation,”Science Robotics, vol. 10, no. 106, p. eadt1497, 2025
2025
-
[2]
Point set registration: Coherent point drift,
A. Myronenko and X. Song, “Point set registration: Coherent point drift,”IEEE transactions on pattern analysis and machine intelligence, vol. 32, no. 12, pp. 2262–2275, 2010
2010
-
[3]
Track deformable objects from point clouds with structure preserved registration,
T. Tang and M. Tomizuka, “Track deformable objects from point clouds with structure preserved registration,”The International Journal of Robotics Research, vol. 41, no. 6, pp. 599–614, 2022
2022
-
[4]
Trackdlo: Tracking deformable linear objects under occlusion with motion coherence,
J. Xiang, H. Dinkel, H. Zhao, N. Gao, B. Coltin, T. Smith, and T. Bretl, “Trackdlo: Tracking deformable linear objects under occlusion with motion coherence,”IEEE Robotics and Automation Letters, vol. 8, no. 10, pp. 6179–6186, 2023
2023
-
[5]
Fastdlo: Fast deformable linear objects instance segmentation,
A. Caporali, K. Galassi, R. Zanella, and G. Palli, “Fastdlo: Fast deformable linear objects instance segmentation,”IEEE robotics and automation letters, vol. 7, no. 4, pp. 9075–9082, 2022
2022
-
[6]
Deformable one-dimensional object detection for routing and manipulation,
A. Keipour, M. Bandari, and S. Schaal, “Deformable one-dimensional object detection for routing and manipulation,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4329–4336, 2022
2022
-
[7]
Knotdlo: Toward interpretable knot tying,
H. Dinkel, R. Navaratna, J. Xiang, B. Coltin, T. Smith, and T. Bretl, “Knotdlo: Toward interpretable knot tying,”arXiv preprint arXiv:2506.22176, 2025
-
[8]
A framework for manipulating deformable linear objects by coherent point drift,
T. Tang, C. Wang, and M. Tomizuka, “A framework for manipulating deformable linear objects by coherent point drift,”IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 3426–3433, 2018
2018
-
[9]
In-air knotting of rope using dual-arm robot based on deep learning,
K. Suzuki, M. Kanamura, Y . Suga, H. Mori, and T. Ogata, “In-air knotting of rope using dual-arm robot based on deep learning,” in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 6724–6731, IEEE, 2021
2021
-
[10]
Combining self-supervised learning and imitation for vision-based rope manipulation,
A. Nair, D. Chen, P. Agrawal, P. Isola, P. Abbeel, J. Malik, and S. Levine, “Combining self-supervised learning and imitation for vision-based rope manipulation,” pp. 2146–2153, 2017
2017
-
[11]
W. Peng, J. Lv, Y . Zeng, H. Chen, S. Zhao, J. Sun, C. Lu, and L. Shao, “Tiebot: Learning to knot a tie from visual demonstration through a real-to-sim-to-real approach,”arXiv preprint arXiv:2407.03245, 2024
-
[12]
V . O. Manturov,Knot theory. CRC press, 2018
2018
-
[13]
Learning topological motion primitives for knot planning,
M. Yan, G. Li, Y . Zhu, and J. Bohg, “Learning topological motion primitives for knot planning,” in2020 IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS), pp. 9457–9464, 2020
2020
-
[14]
Shape control of deformable linear objects with offline and online learning of local linear deformation models,
M. Yu, H. Zhong, and X. Li, “Shape control of deformable linear objects with offline and online learning of local linear deformation models,” in2022 International Conference on Robotics and Automa- tion (ICRA), pp. 1337–1343, 2022
2022
-
[15]
Global model learning for large deformation control of elastic deformable linear objects: An efficient and adaptive approach,
M. Yu, K. Lv, H. Zhong, S. Song, and X. Li, “Global model learning for large deformation control of elastic deformable linear objects: An efficient and adaptive approach,”IEEE Transactions on Robotics, vol. 39, no. 1, pp. 417–436, 2023
2023
-
[16]
Ariadne+: Deep learning–based augmented framework for the instance segmentation of wires,
A. Caporali, R. Zanella, D. D. Greogrio, and G. Palli, “Ariadne+: Deep learning–based augmented framework for the instance segmentation of wires,”IEEE Transactions on Industrial Informatics, vol. 18, no. 12, pp. 8607–8617, 2022
2022
-
[17]
Tracking partially- occluded deformable objects while enforcing geometric constraints,
Y . Wang, D. McConachie, and D. Berenson, “Tracking partially- occluded deformable objects while enforcing geometric constraints,” in2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 14199–14205, 2021
2021
-
[18]
Dlo-splatting: Tracking deformable linear objects using 3d gaussian splatting,
H. Dinkel, M. B ¨usching, A. Longhini, B. Coltin, T. Smith, D. Kragic, M. Bj¨orkman, and T. Bretl, “Dlo-splatting: Tracking deformable linear objects using 3d gaussian splatting,”arXiv preprint arXiv:2505.08644, 2025
-
[19]
Knot planning from observation,
T. Morita, J. Takamatsu, K. Ogawara, H. Kimura, and K. Ikeuchi, “Knot planning from observation,” in2003 IEEE International Con- ference on Robotics and Automation (Cat. No.03CH37422), vol. 3, pp. 3887–3892 vol.3, 2003
2003
-
[20]
Dynamic high-speed knotting of a rope by a manipulator,
Y . Yamakawa, A. Namiki, and M. Ishikawa, “Dynamic high-speed knotting of a rope by a manipulator,”International Journal of Ad- vanced Robotic Systems, vol. 10, no. 10, p. 361, 2013
2013
-
[21]
In-air knotting of rope by a dual-arm multi-finger robot,
S. Kudoh, T. Gomi, R. Katano, T. Tomizawa, and T. Suehiro, “In-air knotting of rope by a dual-arm multi-finger robot,” in2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 6202–6207, IEEE, 2015
2015
-
[22]
Study on tying of a deformable band-shaped object by a dual arm robot,
A. Seo, M. Takizawa, S. Kudoh, and T. Suehiro, “Study on tying of a deformable band-shaped object by a dual arm robot,” in2019 IEEE/SICE International Symposium on System Integration (SII), pp. 79–84, IEEE, 2019
2019
-
[23]
Dbscan revisited, revisited: why and how you should (still) use dbscan,
E. Schubert, J. Sander, M. Ester, H. P. Kriegel, and X. Xu, “Dbscan revisited, revisited: why and how you should (still) use dbscan,”ACM Transactions on Database Systems (TODS), vol. 42, no. 3, pp. 1–21, 2017
2017
-
[24]
Offline-online learning of deformation model for cable manipulation with graph neural networks,
C. Wang, Y . Zhang, X. Zhang, Z. Wu, X. Zhu, S. Jin, T. Tang, and M. Tomizuka, “Offline-online learning of deformation model for cable manipulation with graph neural networks,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5544–5551, 2022
2022
-
[25]
CaRoBio: 3d cable routing with a bio-inspired gripper fingernail,
J. Zuo, B. Zhang, and F. Zhang, “CaRoBio: 3d cable routing with a bio-inspired gripper fingernail,”arXiv, 2025
2025
-
[26]
Mediapipe hands: On-device real-time hand tracking,
F. Zhang, V . Bazarevsky, A. Vakunov, A. Tkachenka, G. Sung, C.-L. Chang, and M. Grundmann, “Mediapipe hands: On-device real-time hand tracking,”arXiv preprint arXiv:2006.10214, 2020
-
[27]
A survey of robot learning from demonstration,
B. D. Argall, S. Chernova, M. Veloso, and B. Browning, “A survey of robot learning from demonstration,”Robotics and autonomous systems, vol. 57, no. 5, pp. 469–483, 2009
2009
-
[28]
Learning rope manipulation policies using dense object descriptors trained on synthetic depth data,
P. Sundaresan, J. Grannen, B. Thananjeyan, A. Balakrishna, M. Laskey, K. Stone, J. E. Gonzalez, and K. Goldberg, “Learning rope manipulation policies using dense object descriptors trained on synthetic depth data,” in2020 IEEE International Conference on Robotics and Automation (ICRA), pp. 9411–9418, 2020
2020
-
[29]
Zero-shot visual imitation,
D. Pathak, P. Mahmoudieh, G. Luo, P. Agrawal, D. Chen, F. Shentu, E. Shelhamer, J. Malik, A. A. Efros, and T. Darrell, “Zero-shot visual imitation,” in2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), pp. 2131–21313, 2018
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.