G-DRAGON: Geospatial Reasoning and Dynamic Planning for Retrieval-Augmented Outdoor Navigation
Pith reviewed 2026-06-29 21:47 UTC · model grok-4.3
The pith
G-DRAGON maps natural-language commands to local OSM entities via lightweight LLM retrieval to support long-range outdoor robot navigation and last-mile search.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
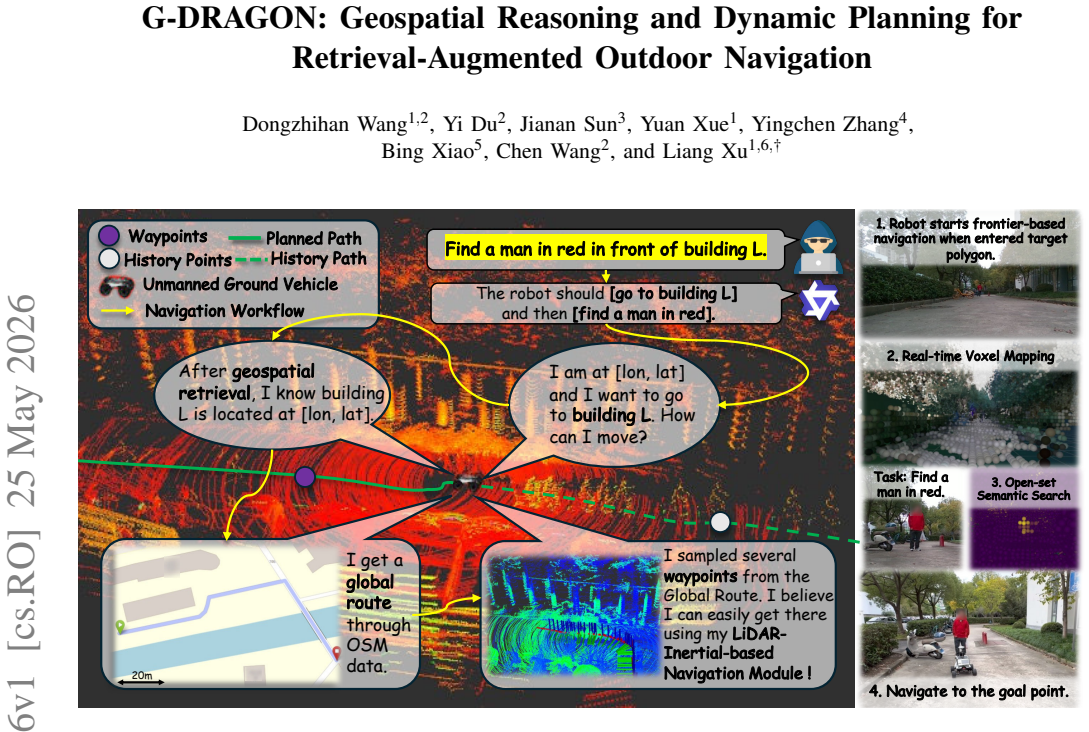
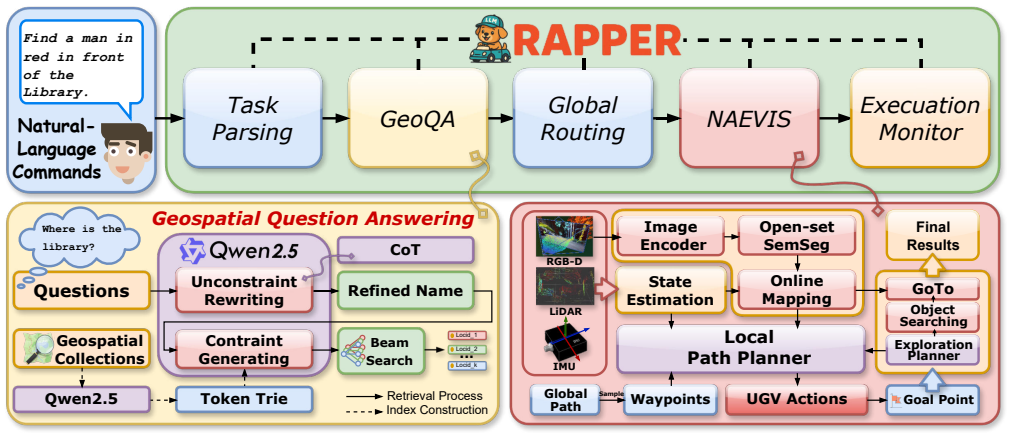
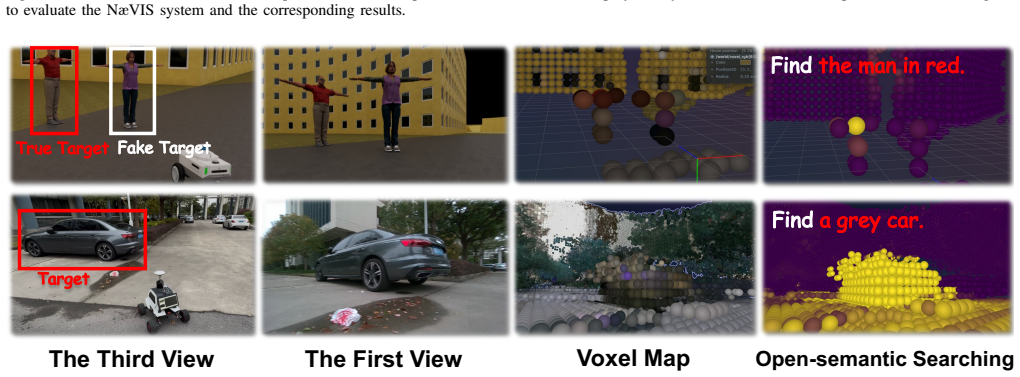
G-DRAGON maps natural-language commands to versioned, local OSM entities via generative retrieval based on lightweight LLM, yielding accurate coordinates for global route planning. A high-level planning module bridges global topological routes with the SLAM system, projecting geospatial waypoints into the robot's navigable frame. For the last mile, the framework transitions to frontier-based exploration and open-set semantic voxel mapping to localize open-vocabulary targets.
What carries the argument
Generative retrieval module using lightweight LLM to map commands to OSM entities and produce coordinates for global planning.
If this is right
- The framework outperforms state-of-the-art baselines in simulation.
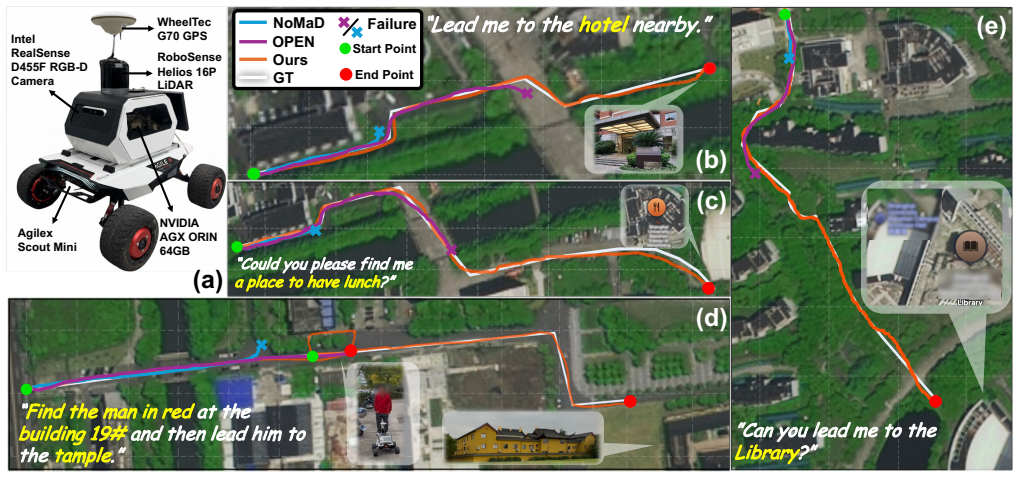
- Real UGV tests succeed on person-search missions with trajectories up to 500 m in unseen urban settings.
- The system avoids reliance on cloud-based large LLMs and their associated factual errors.
- Global topological planning connects directly to local SLAM while allowing seamless switch to frontier exploration.
Where Pith is reading between the lines
- The same retrieval pattern could be tested with map sources other than OSM.
- Local-only operation may lower communication costs and latency for fleets of robots.
- Versioned map handling suggests the method could adapt to slowly changing environments by refreshing entity data.
- Extending the open-vocabulary mapping step to additional sensor types could improve target recognition under varied lighting.
Load-bearing premise
The lightweight LLM produces accurate coordinates from language without factual hallucination and OSM entities supply enough geospatial detail for reliable long-range routes.
What would settle it
A real-world trial in which the lightweight LLM outputs incorrect coordinates for a command, resulting in the robot failing to reach the intended global route.
Figures

read the original abstract
Autonomous ground robots operating in large-scale outdoor environments require both robust long-range navigation and fine-grained ''last-mile'' exploration. Current advances in visual-language navigation (VLN) work well at short-range tasks, lacking geospatial grounding for long-distance missions. Some OpenStreetMap (OSM)-based methods relying on cloud-based Large Language Models (LLMs) are prone to factual hallucination and cannot conduct ''last-mile'' exploration based on human instruction. To address these challenges, we present G-DRAGON, a retrieval-augmented framework for outdoor, open-world navigation. This framework maps natural-language commands to versioned, local OSM entities via generative retrieval based on lightweight LLM, yielding accurate coordinates for global route planning. A high-level planning module bridges global topological routes with the SLAM system, projecting geospatial waypoints into the robot's navigable frame. For the ''last mile," the framework transitions to frontier-based exploration and open-set semantic voxel mapping to localize open-vocabulary targets. Experimental results in simulation demonstrate our framework outperforms state-of-the-art baselines. Furthermore, we validate the system in unseen real-world urban environments on an Unmanned Ground Vehicle (UGV), successfully completing person-search missions with trajectories of up to 500m.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces G-DRAGON, a retrieval-augmented framework for long-range outdoor navigation on ground robots. It maps natural-language instructions to versioned local OpenStreetMap (OSM) entities via generative retrieval with a lightweight LLM to obtain accurate coordinates for global topological route planning. A high-level planner projects these waypoints into the robot's local frame for integration with SLAM; for last-mile tasks the system switches to frontier-based exploration combined with open-set semantic voxel mapping. The central claims are that the framework outperforms state-of-the-art baselines in simulation and that it successfully completes person-search missions on an unseen real-world UGV with trajectories up to 500 m.
Significance. If the quantitative results and real-world validation hold, the work would offer a concrete route toward scalable geospatial grounding for open-world robot navigation, addressing hallucination risks in cloud LLM + OSM pipelines while retaining last-mile capability. The versioned local-OSM mechanism and the explicit global-to-local bridging are potentially reusable ideas for the VLN and outdoor robotics communities.
major comments (2)
- [Experimental Results] Experimental Results section: the abstract states outperformance over SOTA baselines and reports 500 m real-world trajectories, yet no quantitative metrics, error bars, baseline names, or statistical tests are supplied. This information is load-bearing for the central claim of superiority and must be provided with tables or figures before the result can be evaluated.
- [Methods] Methods (generative retrieval and versioned OSM): the claim that lightweight-LLM generative retrieval yields accurate OSM coordinates without factual hallucination rests on the versioned local-OSM mechanism, but the manuscript supplies no ablation, retrieval accuracy numbers, or failure-case analysis. This assumption is load-bearing for both the simulation and real-world claims.
minor comments (2)
- [Abstract] The abstract uses the phrase "outperforms state-of-the-art baselines" without naming the baselines; this should be expanded even in the abstract for clarity.
- [High-level Planning] Notation for the high-level planning module (projection of geospatial waypoints into the navigable frame) is introduced without an equation or diagram reference; a small schematic would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We agree that the current version of the manuscript requires additional quantitative detail and analysis to fully support the central claims, and we will revise accordingly.
read point-by-point responses
-
Referee: [Experimental Results] Experimental Results section: the abstract states outperformance over SOTA baselines and reports 500 m real-world trajectories, yet no quantitative metrics, error bars, baseline names, or statistical tests are supplied. This information is load-bearing for the central claim of superiority and must be provided with tables or figures before the result can be evaluated.
Authors: We agree that the Experimental Results section must supply the requested quantitative support. The revised manuscript will add tables and figures reporting all performance metrics (with error bars), explicit baseline names, and statistical tests for both simulation and real-world experiments. revision: yes
-
Referee: [Methods] Methods (generative retrieval and versioned OSM): the claim that lightweight-LLM generative retrieval yields accurate OSM coordinates without factual hallucination rests on the versioned local-OSM mechanism, but the manuscript supplies no ablation, retrieval accuracy numbers, or failure-case analysis. This assumption is load-bearing for both the simulation and real-world claims.
Authors: We acknowledge that the current manuscript lacks explicit ablations, retrieval accuracy metrics, and failure-case analysis for the generative retrieval and versioned OSM components. The revision will incorporate these elements, including quantitative retrieval accuracy figures and representative failure cases, to substantiate the hallucination-mitigation claims. revision: yes
Circularity Check
No significant circularity
full rationale
The paper describes an engineering framework for retrieval-augmented navigation that maps language commands to OSM entities via lightweight LLM generative retrieval, then bridges global routes to local frontier exploration. No equations, fitted parameters, or derivation steps appear in the provided text. All performance claims rest on external experimental outcomes (simulation outperformance and real-world 500 m UGV trajectories) rather than any quantity defined in terms of itself or justified solely by self-citation. The central mechanisms are presented as design choices with stated mitigations for hallucination, not as predictions forced by prior fits or uniqueness theorems.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Nomad: Goal masked diffusion policies for navigation and exploration,
A. Sridhar, D. Shah, C. Glossop, and S. Levine, “Nomad: Goal masked diffusion policies for navigation and exploration,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 63–70
2024
-
[2]
Vint: A foundation model for visual navigation,
D. Shah, A. Sridhar, N. Dashora, K. Stachowicz, K. Black, N. Hirose, and S. Levine, “Vint: A foundation model for visual navigation,” in Conference on Robot Learning, 2023, pp. 711–733
2023
-
[3]
Embodied navigation foundation model,
J. Zhang, A. Li, Y . Qi, M. Li, J. Liu, S. Wang, H. Liu, G. Zhou, Y . Wu, X. Li,et al., “Embodied navigation foundation model,”arXiv preprint arXiv:2509.12129, 2025
-
[4]
Navila: Legged robot vision-language- action model for navigation,
A.-C. Cheng, Y . Ji, Z. Yang, Z. Gongye, X. Zou, J. Kautz, E. Bıyık, H. Yin, S. Liu, and X. Wang, “Navila: Legged robot vision-language- action model for navigation,”arXiv preprint arXiv:2412.04453, 2024
-
[5]
Trackvla++: Unleashing reasoning and memory capabilities in vla models for embodied visual tracking,
J. Liu, Y . Qi, J. Zhang, M. Li, S. Wang, K. Wu, H. Ye, H. Zhang, Z. Chen, F. Zhong,et al., “Trackvla++: Unleashing reasoning and memory capabilities in vla models for embodied visual tracking,” arXiv preprint arXiv:2510.07134, 2025
-
[6]
Openbench: A new benchmark and baseline for semantic navigation in smart logistics,
J. Wang, D. Huo, Z. Xu, Y . Shi, Y . Yan, Y . Wang, C. Gao, Y . Qiao, and G. Zhou, “Openbench: A new benchmark and baseline for semantic navigation in smart logistics,”arXiv preprint arXiv:2502.09238, 2025
-
[7]
Transformer memory as a differentiable search index,
Y . Tay, V . Q. Tran, M. Dehghani, J. Ni, D. Bahri, H. Mehta, Z. Qin, K. Hui, Z. Zhao, J. Gupta, T. Schuster, W. W. Cohen, and D. Metzler, “Transformer memory as a differentiable search index,”
-
[8]
Available: https://arxiv.org/abs/2202.06991
[Online]. Available: https://arxiv.org/abs/2202.06991
-
[9]
Autoregressive entity retrieval,
N. D. Cao, G. Izacard, S. Riedel, and F. Petroni, “Autoregressive entity retrieval,” 2021. [Online]. Available: https://arxiv.org/abs/2010.00904
-
[10]
Lm-nav: Robotic navigation with large pre-trained models of language, vision, and action,
D. Shah, B. Osinski, B. Ichter, and S. Levine, “Lm-nav: Robotic navigation with large pre-trained models of language, vision, and action,” 2022. [Online]. Available: https://arxiv.org/abs/2207.04429
-
[11]
Viking: Vision-based kilometer-scale naviga- tion with geographic hints,
D. Shah and S. Levine, “Viking: Vision-based kilometer-scale naviga- tion with geographic hints,” inRobotics: Science and Systems XVIII, ser. RSS2022, 2022
2022
-
[12]
Sayplan: Grounding large language models using 3d scene graphs for scalable robot task planning,
K. Rana, J. Haviland, S. Garg, J. Abou-Chakra, I. Reid, and N. Suen- derhauf, “Sayplan: Grounding large language models using 3d scene graphs for scalable robot task planning,” inProceedings of The 7th Conference on Robot Learning, vol. 229, 2023, pp. 23–72
2023
-
[13]
H. Xu, Y . Hu, C. Gao, Z. Zhu, Y . Zhao, Y . Li, and Q. Yin, “Geonav: Empowering mllms with explicit geospatial reasoning abilities for language-goal aerial navigation,”arXiv preprint arXiv:2504.09587, 2025
-
[14]
Embodied-RAG: General non-parametric embodied memory for retrieval and generation,
Q. Xie, S. Y . Min, P. Ji, Y . Yang, T. Zhang, K. Xu, A. Bajaj, R. Salakhutdinov, M. Johnson-Roberson, and Y . Bisk, “Embodied- rag: General non-parametric embodied memory for retrieval and generation,”arXiv preprint arXiv:2409.18313, 2024
-
[15]
A frontier-based approach for autonomous exploration,
B. Yamauchi, “A frontier-based approach for autonomous exploration,” inProceedings 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation, 1997, pp. 146–151
1997
-
[16]
Sg-nav: Online 3d scene graph prompting for llm-based zero-shot object navigation,
H. Yin, X. Xu, Z. Wu, J. Zhou, and J. Lu, “Sg-nav: Online 3d scene graph prompting for llm-based zero-shot object navigation,”arXiv preprint arXiv:2410.08189, 2024
-
[17]
Apex- nav: An adaptive exploration strategy for zero-shot object navigation with target-centric semantic fusion,
M. Zhang, Y . Du, C. Wu, J. Zhou, Z. Qi, J. Ma, and B. Zhou, “Apex- nav: An adaptive exploration strategy for zero-shot object navigation with target-centric semantic fusion,” 2025
2025
-
[18]
Chain-of-Thought Prompting Elicits Reasoning in Large Language Models
J. Wei, X. Wang,et al., “Chain-of-thought prompting elicits reasoning in large language models,” 2023. [Online]. Available: https://arxiv.org/abs/2201.11903
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[19]
PICARD: Parsing in- crementally for constrained auto-regressive decoding from language models,
T. Scholak, N. Schucher, and D. Bahdanau, “PICARD: Parsing in- crementally for constrained auto-regressive decoding from language models,” inProceedings of the 2021 Conference on Empirical Methods in Natural Language Processing, 2021, pp. 9895–9901
2021
-
[20]
Btgenbot: Behavior tree generation for robotic tasks with lightweight llms,
R. A. Izzo, G. Bardaro, and M. Matteucci, “Btgenbot: Behavior tree generation for robotic tasks with lightweight llms,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
2024
-
[21]
Real-time routing with openstreetmap data,
D. Luxen and C. Vetter, “Real-time routing with openstreetmap data,” inProceedings of the 19th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, 2011, pp. 513–516
2011
-
[22]
ProgPrompt: Generating Situated Robot Task Plans using Large Language Models
I. Singh, V . Blukis, A. Mousavian, A. Goyal, D. Xu, J. Tremblay, D. Fox, J. Thomason, and A. Garg, “Progprompt: Generating situated robot task plans using large language models,” 2022. [Online]. Available: https://arxiv.org/abs/2209.11302
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[23]
Super odometry: Imu-centric lidar-visual-inertial estimator for challenging environments,
S. Zhao, H. Zhang, P. Wang, L. Nogueira, and S. Scherer, “Super odometry: Imu-centric lidar-visual-inertial estimator for challenging environments,” in2021 IEEE/RSJ International Conference on Intel- ligent Robots and Systems (IROS), 2021, pp. 8729–8736
2021
-
[24]
Fast-lio2: Fast direct lidar-inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “Fast-lio2: Fast direct lidar-inertial odometry,” 2021. [Online]. Available: https://arxiv.org/abs/2107.06829
-
[26]
Far planner: Fast, attemptable route planner using dynamic visibility update,
F. Yang, C. Cao, H. Zhu, J. Oh, and J. Zhang, “Far planner: Fast, attemptable route planner using dynamic visibility update,” 2022. [Online]. Available: https://arxiv.org/abs/2504.06994
-
[27]
Representation granularity enables time-efficient autonomous exploration in large, complex worlds,
C. Cao, H. Zhu, Z. Ren, H. Choset, and J. Zhang, “Representation granularity enables time-efficient autonomous exploration in large, complex worlds,”Science Robotics, vol. 8, p. eadf0970, 2023
2023
-
[28]
Raven: Resilient aerial navigation via open-set semantic memory and behavior adaptation,
S. Kim, O. Alama, D. Kurdydyk, J. Keller, N. Keetha, W. Wang, Y . Bisk, and S. Scherer, “Raven: Resilient aerial navigation via open-set semantic memory and behavior adaptation,”arXiv preprint arXiv:2509.23563, 2025
-
[29]
On Evaluation of Embodied Navigation Agents
P. Anderson, A. Chang,et al., “On evaluation of embodied navigation agents,” 2018. [Online]. Available: https://arxiv.org/abs/1807.06757
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[30]
The probabilistic relevance frame- work: Bm25 and beyond,
S. Robertson and H. Zaragoza, “The probabilistic relevance frame- work: Bm25 and beyond,”Foundations and Trends® in Information Retrieval, vol. 3, pp. 333–389, 2009
2009
-
[31]
Dense passage retrieval for open-domain question answering,
V . Karpukhin, B. O ˘guz, S. Min, P. Lewis, L. Wu, S. Edunov, D. Chen, and W. tau Yih, “Dense passage retrieval for open-domain question answering,” 2020
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.