Gaussian-Voxel Duet: A Dual-Scaffolding Hybrid Representation for Fast and Accurate Monocular Surface Reconstruction
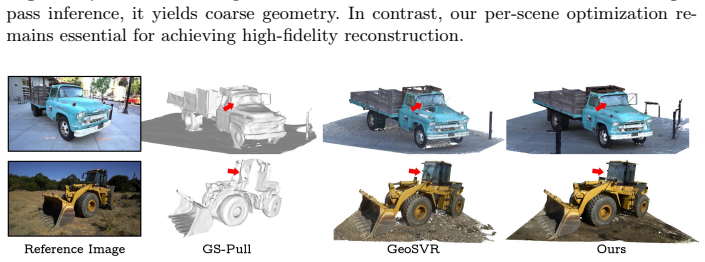
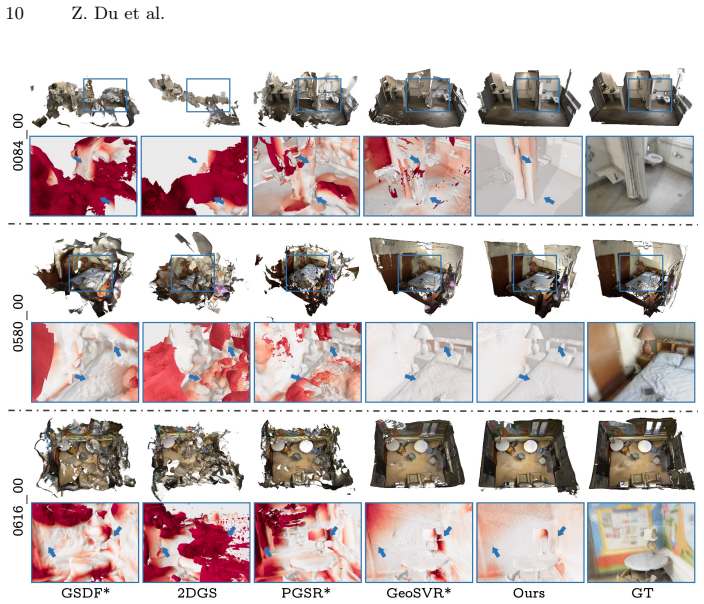
Pith reviewed 2026-06-29 18:26 UTC · model grok-4.3
The pith
Tethering 3D Gaussians to voxel SDF surfaces improves geometric accuracy and rendering efficiency in monocular reconstruction.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
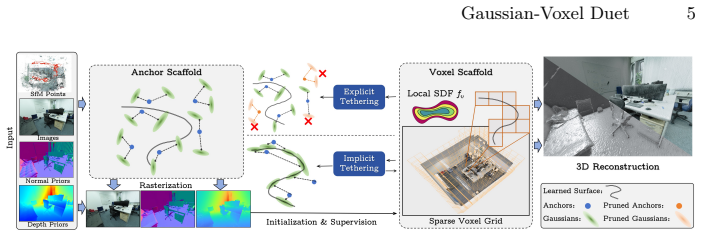
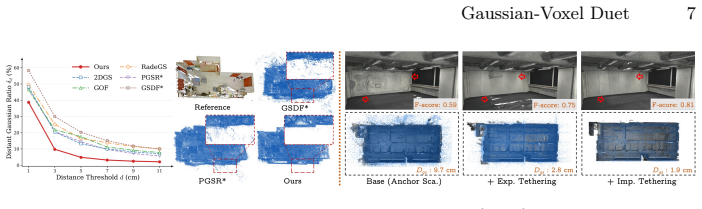
The authors establish that a dual-scaffolding approach, with Gaussians tethered to jointly optimized voxel SDFs, explicitly confines primitives to surfaces, thereby enhancing representation efficiency and reconstruction accuracy while preserving fast optimization and real-time rendering.
What carries the argument
The hybrid Gaussian-Voxel representation with implicit surface tethering loss, which pulls Gaussians closer to SDF-induced surfaces in a mutually regularized way.
If this is right
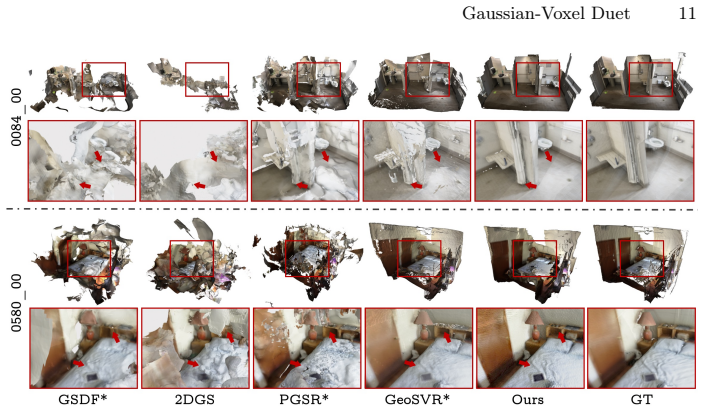
- State-of-the-art surface reconstruction quality on ScanNet++, ScanNetv2, and DeepBlending.
- Superior novel view synthesis against leading baselines.
- Fast training convergence maintained alongside real-time rendering.
- Improved representation efficiency through reduced superfluous primitives.
Where Pith is reading between the lines
- The tethering mechanism may extend to other implicit representations beyond SDFs for tighter geometry control.
- Scaling the sparse voxel scaffold could support larger outdoor environments without proportional increases in compute.
- The mutual regularization between Gaussians and voxels might reduce reliance on post-processing steps in reconstruction pipelines.
Load-bearing premise
That tethering Gaussians to voxel SDF surfaces via the implicit surface tethering loss will measurably improve geometry accuracy without introducing new optimization instabilities or requiring dataset-specific tuning that was not disclosed.
What would settle it
A comparison on ScanNet++ showing no gains in surface reconstruction metrics or the appearance of training instabilities would falsify the central claim.
Figures







read the original abstract
While 3D Gaussian Splatting has achieved remarkable success in photorealistic novel view synthesis, its pursuit of fast and high-fidelity 3D reconstruction has long been constrained by a trade-off between geometric accuracy and optimization efficiency. Methods specialized in image rendering converge quickly at the cost of imperfect geometry caused by superfluous primitives overfitting training views, while methods integrating neural signed-distance field (SDF) for better geometry incur prohibitive training costs. In this paper, we attempt to strike a better trade-off by tethering scaffold-anchored Gaussians to a jointly optimized sparse voxel scaffold. This hybrid Gaussian-Voxel representation explicitly confines anchored Gaussians to a narrow band around surfaces defined by voxelized SDFs, which effectively improves representation efficiency and condenses floating Gaussians without sacrificing geometry quality. An implicit surface tethering loss further pulls individual Gaussian primitives closer to SDF-induced surfaces in a mutually regularized manner for improved reconstruction accuracy. Extensive experiments on diverse real-world indoor scenes from ScanNet++, ScanNetv2, and DeepBlending datasets demonstrate that our method achieves state-of-the-art surface reconstruction quality as well as superior novel view synthesis against leading baselines, while maintaining fast training convergence and real-time rendering. Code will be available at https://github.com/duzh11/VoxelGS.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Gaussian-Voxel Duet, a hybrid dual-scaffolding representation that anchors 3D Gaussians to a jointly optimized sparse voxel SDF scaffold. An implicit surface tethering loss is proposed to confine Gaussians to narrow bands around SDF-defined surfaces, aiming to reduce floating primitives and improve geometric accuracy while preserving the fast convergence and real-time rendering of Gaussian Splatting. Extensive experiments on ScanNet++, ScanNetv2, and DeepBlending are reported to demonstrate state-of-the-art surface reconstruction quality and superior novel view synthesis compared to leading baselines.
Significance. If the results hold, the work meaningfully advances monocular 3D reconstruction by addressing the accuracy-efficiency trade-off between pure Gaussian Splatting and neural SDF methods. The tethering mechanism and hybrid representation provide a concrete, mutually regularized approach that maintains real-time capabilities; the planned code release supports reproducibility and potential adoption in the field.
minor comments (2)
- [Abstract] The abstract and introduction would benefit from explicit numerical comparisons (e.g., Chamfer distance or PSNR values) rather than qualitative statements of 'state-of-the-art' to allow immediate assessment of the magnitude of improvement.
- [Method] Notation for the implicit surface tethering loss could be clarified with an explicit equation reference in the main text to distinguish it from standard Gaussian and SDF terms.
Simulated Author's Rebuttal
We thank the referee for the positive assessment and recommendation to accept the paper. The recognition of the hybrid representation's ability to balance geometric accuracy and efficiency is appreciated.
Circularity Check
No significant circularity detected
full rationale
The paper introduces a hybrid Gaussian-voxel representation with an implicit surface tethering loss, building on established 3D Gaussian Splatting and SDF concepts. No equations, fitted parameters, or predictions are shown that reduce by construction to the inputs (e.g., no self-definitional tethering loss or self-citation load-bearing uniqueness claims). The central claims rest on experimental results on external datasets rather than internal redefinitions or renamed known results. The derivation chain is self-contained against external benchmarks with no load-bearing steps that collapse to tautology.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
IEEE Transactions on Visualization and Computer Graphics (TVCG) (2024)
Chen, D., Li, H., Ye, W., Wang, Y., Xie, W., Zhai, S., Wang, N., Liu, H., Bao, H., Zhang, G.: Pgsr: Planar-based gaussian splatting for efficient and high-fidelity sur- face reconstruction. IEEE Transactions on Visualization and Computer Graphics (TVCG) (2024)
2024
-
[2]
Neural Infor- mation Processing Systems (NeurIPS)37, 139725–139750 (2024)
Chen, H., Wei, F., Li, C., Huang, T., Wang, Y., Lee, G.H.: Vcr-gaus: View con- sistent depth-normal regularizer for gaussian surface reconstruction. Neural Infor- mation Processing Systems (NeurIPS)37, 139725–139750 (2024)
2024
-
[3]
In: Proceedings of the Asian Confer- ence on Computer Vision (ACCV)
Choi, J., Lee, Y., Lee, H., Kwon, H., Manocha, D.: Meshgs: Adaptive mesh-aligned gaussian splatting for high-quality rendering. In: Proceedings of the Asian Confer- ence on Computer Vision (ACCV). pp. 3310–3326 (2024)
2024
-
[4]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Dai,A.,Chang,A.X.,Savva,M.,Halber,M.,Funkhouser,T.,Nießner,M.:Scannet: Richly-annotated 3d reconstructions of indoor scenes. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 5828–5839 (2017)
2017
-
[5]
In: SIGGRAPH
Dai, P., Xu, J., Xie, W., Liu, X., Wang, H., Xu, W.: High-quality surface recon- struction using gaussian surfels. In: SIGGRAPH. pp. 1–11 (2024)
2024
-
[6]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Dong, W., Choy, C., Loop, C., Litany, O., Zhu, Y., Anandkumar, A.: Fast monocu- lar scene reconstruction with global-sparse local-dense grids. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 4263–4272 (2023)
2023
-
[7]
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)45(5), 5417–5435 (2022)
Dong, W., Lao, Y., Kaess, M., Koltun, V.: Ash: A modern framework for paral- lel spatial hashing in 3d perception. IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)45(5), 5417–5435 (2022)
2022
-
[8]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Fridovich-Keil, S., Yu, A., Tancik, M., Chen, Q., Recht, B., Kanazawa, A.: Plenox- els: Radiance fields without neural networks. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 5501–5510 (2022)
2022
-
[9]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Guédon, A., Lepetit, V.: Sugar: Surface-aligned gaussian splatting for efficient 3d mesh reconstruction and high-quality mesh rendering. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 5354–5363 (2024)
2024
-
[10]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Guo, H., Peng, S., Lin, H., Wang, Q., Zhang, G., Bao, H., Zhou, X.: Neural 3d scene reconstruction with the manhattan-world assumption. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 5511–5520 (2022)
2022
-
[11]
ACM Transactions on Graphics (TOG)37(6), 1–15 (2018)
Hedman, P., Philip, J., Price, T., Frahm, J.M., Drettakis, G., Brostow, G.: Deep blending for free-viewpoint image-based rendering. ACM Transactions on Graphics (TOG)37(6), 1–15 (2018)
2018
-
[12]
In: SIGGRAPH
Huang, B., Yu, Z., Chen, A., Geiger, A., Gao, S.: 2d gaussian splatting for geo- metrically accurate radiance fields. In: SIGGRAPH. pp. 1–11 (2024) 16 Z. Du et al
2024
-
[13]
IEEE Robotics and Automation Letters8(10), 6787–6794 (2023)
Jiang, C., Zhang, H., Liu, P., Yu, Z., Cheng, H., Zhou, B., Shen, S.: H2-mapping: Real-time dense mapping using hierarchical hybrid representation. IEEE Robotics and Automation Letters8(10), 6787–6794 (2023)
2023
-
[14]
ACM Transactions on Graphics (TOG)42(4), 139–1 (2023)
Kerbl, B., Kopanas, G., Leimkühler, T., Drettakis, G.: 3d gaussian splatting for real-time radiance field rendering. ACM Transactions on Graphics (TOG)42(4), 139–1 (2023)
2023
-
[15]
arXiv preprint arXiv:2509.18090 (2025)
Li, J., Zhang, J., Zhang, Y., Bai, X., Zheng, J., Yu, X., Gu, L.: Geosvr: Tam- ing sparse voxels for geometrically accurate surface reconstruction. arXiv preprint arXiv:2509.18090 (2025)
-
[16]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Li, Z., Müller, T., Evans, A., Taylor, R.H., Unberath, M., Liu, M.Y., Lin, C.H.: Neuralangelo: High-fidelity neural surface reconstruction. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 8456–8465 (2023)
2023
-
[17]
Liu, J., Wan, Y., Wang, B., Zheng, C., Lin, J., Zhang, F.: Gs-sdf: Lidar-augmented gaussian splatting and neural sdf for geometrically consistent rendering and recon- struction. arXiv preprint arXiv:2503.10170 (2025)
-
[18]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Lu, T., Yu, M., Xu, L., Xiangli, Y., Wang, L., Lin, D., Dai, B.: Scaffold-gs: Struc- tured 3d gaussians for view-adaptive rendering. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 20654–20664 (2024)
2024
-
[19]
ACM Transac- tions on Graphics (TOG)43(6), 1–12 (2024)
Lyu, X., Sun, Y.T., Huang, Y.H., Wu, X., Yang, Z., Chen, Y., Pang, J., Qi, X.: 3dgsr: Implicit surface reconstruction with 3d gaussian splatting. ACM Transac- tions on Graphics (TOG)43(6), 1–12 (2024)
2024
-
[20]
In: Eu- ropean Conference on Computer Vision (ECCV)
Mildenhall, B., Srinivasan, P.P., Tancik, M., Barron, J.T., Ramamoorthi, R., Ng, R.: Nerf: Representing scenes as neural radiance fields for view synthesis. In: Eu- ropean Conference on Computer Vision (ECCV). pp. 405–421. Springer (2020)
2020
-
[21]
ACM Transactions on Graphics (TOG)41(4), 1– 15 (2022)
Müller,T.,Evans,A.,Schied,C.,Keller,A.:Instantneuralgraphicsprimitiveswith a multiresolution hash encoding. ACM Transactions on Graphics (TOG)41(4), 1– 15 (2022)
2022
-
[22]
In: European Conference on Computer Vision (ECCV)
Murez, Z., Van As, T., Bartolozzi, J., Sinha, A., Badrinarayanan, V., Rabinovich, A.: Atlas: End-to-end 3d scene reconstruction from posed images. In: European Conference on Computer Vision (ECCV). pp. 414–431. Springer (2020)
2020
-
[23]
In: International Conference on Com- puter Vision (ICCV)
Oechsle, M., Peng, S., Geiger, A.: Unisurf: Unifying neural implicit surfaces and radiance fields for multi-view reconstruction. In: International Conference on Com- puter Vision (ICCV). pp. 5589–5599 (2021)
2021
-
[24]
Ren, K., Jiang, L., Lu, T., Yu, M., Xu, L., Ni, Z., Dai, B.: Octree-gs: Towards consistentreal-timerenderingwithlod-structured3dgaussians.IEEETransactions on Pattern Analysis and Machine Intelligence (TPAMI) (2025)
2025
-
[25]
In: IEEE Conference on Com- puter Vision and Pattern Recognition (CVPR)
Ruan, C., Wang, Y., Guan, T., Zhang, B., Ju, L.: Indoorgs: Geometric cues guided gaussian splatting for indoor scene reconstruction. In: IEEE Conference on Com- puter Vision and Pattern Recognition (CVPR). pp. 844–853 (2025)
2025
-
[26]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Sun, C., Choe, J., Loop, C., Ma, W.C., Wang, Y.C.F.: Sparse voxels rasterization: Real-time high-fidelity radiance field rendering. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 16187–16196 (2025)
2025
-
[27]
In: Pro- ceedings of the IEEE Workshop on Applications of Computer Vision (WACV)
Turkulainen, M., Ren, X., Melekhov, I., Seiskari, O., Rahtu, E., Kannala, J.: Dn- splatter: Depth and normal priors for gaussian splatting and meshing. In: Pro- ceedings of the IEEE Workshop on Applications of Computer Vision (WACV). pp. 2421–2431. IEEE (2025)
2025
-
[28]
In: European Conference on Computer Vision (ECCV)
Wang, J., Wang, P., Long, X., Theobalt, C., Komura, T., Liu, L., Wang, W.: Neuris: Neural reconstruction of indoor scenes using normal priors. In: European Conference on Computer Vision (ECCV). pp. 139–155. Springer (2022) Gaussian-Voxel Duet 17
2022
-
[29]
Neural Information Processing Systems (NeurIPS)34, 27171–27183 (2021)
Wang, P., Liu, L., Liu, Y., Theobalt, C., Komura, T., Wang, W.: Neus: Learning neural implicit surfaces by volume rendering for multi-view reconstruction. Neural Information Processing Systems (NeurIPS)34, 27171–27183 (2021)
2021
-
[30]
Neural Information Processing Systems (NeurIPS)37, 103168–103197 (2024)
Wang, Y., Huang, D., Ye, W., Zhang, G., Ouyang, W., He, T.: Neurodin: A two- stage framework for high-fidelity neural surface reconstruction. Neural Information Processing Systems (NeurIPS)37, 103168–103197 (2024)
2024
-
[31]
In: IEEE International Conference on Robotics and Automation (ICRA)
Xiang, H., Li, X., Cheng, K., Lai, X., Zhang, W., Liao, Z., Zeng, L., Liu, X.: Gaus- sianroom: Improving 3d gaussian splatting with sdf guidance and monocular cues for indoor scene reconstruction. In: IEEE International Conference on Robotics and Automation (ICRA). pp. 2686–2693. IEEE (2025)
2025
-
[32]
arXiv preprint arXiv:2411.15723 (2024)
Xu, B., Hu, J., Li, J., He, Y.: Gsurf: 3d reconstruction via signed distance fields with direct gaussian supervision. arXiv preprint arXiv:2411.15723 (2024)
-
[33]
Neural Information Processing Systems (NeurIPS)34, 4805–4815 (2021)
Yariv, L., Gu, J., Kasten, Y., Lipman, Y.: Volume rendering of neural implicit surfaces. Neural Information Processing Systems (NeurIPS)34, 4805–4815 (2021)
2021
-
[34]
ACM Trans- actions on Graphics (TOG)43(6), 1–18 (2024)
Ye, C., Qiu, L., Gu, X., Zuo, Q., Wu, Y., Dong, Z., Bo, L., Xiu, Y., Han, X.: Sta- blenormal: Reducing diffusion variance for stable and sharp normal. ACM Trans- actions on Graphics (TOG)43(6), 1–18 (2024)
2024
-
[35]
In: International Conference on Computer Vision (ICCV)
Yeshwanth, C., Liu, Y.C., Nießner, M., Dai, A.: Scannet++: A high-fidelity dataset of 3d indoor scenes. In: International Conference on Computer Vision (ICCV). pp. 12–22 (2023)
2023
-
[36]
In: International Conference on Computer Vision (ICCV)
Yin, W., Zhang, C., Chen, H., Cai, Z., Yu, G., Wang, K., Chen, X., Shen, C.: Met- ric3d: Towards zero-shot metric 3d prediction from a single image. In: International Conference on Computer Vision (ICCV). pp. 9043–9053 (2023)
2023
-
[37]
In: International Conference on Computer Vision (ICCV)
Yu, A., Li, R., Tancik, M., Li, H., Ng, R., Kanazawa, A.: Plenoctrees for real- time rendering of neural radiance fields. In: International Conference on Computer Vision (ICCV). pp. 5752–5761 (2021)
2021
-
[38]
Neural Information Processing Sys- tems (NeurIPS)37, 129507–129530 (2024)
Yu, M., Lu, T., Xu, L., Jiang, L., Xiangli, Y., Dai, B.: Gsdf: 3dgs meets sdf for improved neural rendering and reconstruction. Neural Information Processing Sys- tems (NeurIPS)37, 129507–129530 (2024)
2024
-
[39]
Neural Information Processing Systems (NeurIPS)35, 25018–25032 (2022)
Yu, Z., Peng, S., Niemeyer, M., Sattler, T., Geiger, A.: Monosdf: Exploring monoc- ular geometric cues for neural implicit surface reconstruction. Neural Information Processing Systems (NeurIPS)35, 25018–25032 (2022)
2022
-
[40]
ACM Transactions on Graphics (TOG)43(6), 1–13 (2024)
Yu, Z., Sattler, T., Geiger, A.: Gaussian opacity fields: Efficient adaptive surface reconstruction in unbounded scenes. ACM Transactions on Graphics (TOG)43(6), 1–13 (2024)
2024
-
[41]
RaDe-GS: Rasterizing depth in Gaussian splatting.ACM Transactions on Graphics, 2026
Zhang, B., Fang, C., Shrestha, R., Liang, Y., Long, X., Tan, P.: Rade-gs: Raster- izing depth in gaussian splatting. arXiv preprint arXiv:2406.01467 (2024)
-
[42]
arXiv preprint arXiv:2010.07492 (2020)
Zhang, K., Riegler, G., Snavely, N., Koltun, V.: Nerf++: Analyzing and improving neural radiance fields. arXiv preprint arXiv:2010.07492 (2020)
-
[43]
Neural Information Processing Sys- tems (NeurIPS)37, 101856–101879 (2024)
Zhang, W., Liu, Y.S., Han, Z.: Neural signed distance function inference through splatting 3d gaussians pulled on zero-level set. Neural Information Processing Sys- tems (NeurIPS)37, 101856–101879 (2024)
2024
-
[44]
arXiv preprint arXiv:2510.25129 (2025)
Zhang, X., Bao, C., Chen, Y., Zhai, H., Dong, Y., Bao, H., Cui, Z., Zhang, G.: Atlasgs: Atlanta-world guided surface reconstruction with implicit structured gaus- sians. arXiv preprint arXiv:2510.25129 (2025)
-
[45]
arXiv preprint arXiv:2411.16392 (2024)
Zhang, Z., Huang, B., Jiang, H., Zhou, L., Xiang, X., Shen, S.: Quadratic gaus- sian splatting for efficient and detailed surface reconstruction. arXiv preprint arXiv:2411.16392 (2024)
-
[46]
Zhu, Z.L., Yang, J., Wang, B.: Gaussian splatting with discretized sdf for re- lightable assets. In: International Conference on Computer Vision (ICCV). pp. 25155–25164 (2025) Gaussian-Voxel Duet 1 Supplementary Material for Gaussian-Voxel Duet A Overview This supplementary material is organized as follows: (1) Sec. B provides addi- tional implementation ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.