Pretrained Approximators for Low-Thrust Trajectory Cost and Reachability
Pith reviewed 2026-06-29 19:36 UTC · model grok-4.3
The pith
Neural networks accurately approximate low-thrust trajectory fuel costs and transfer times while generalizing across orbits via self-similar transforms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
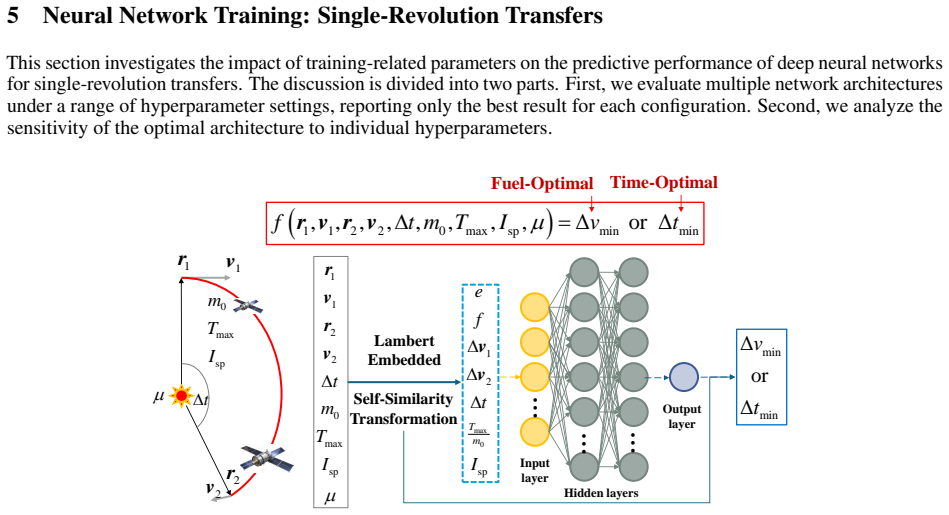
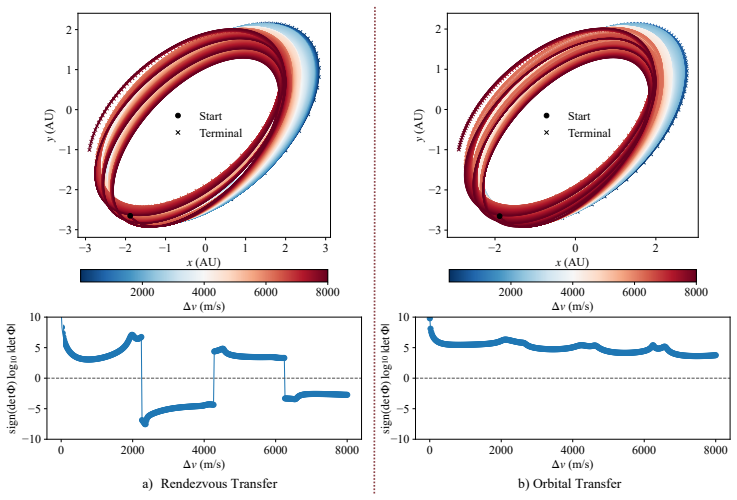
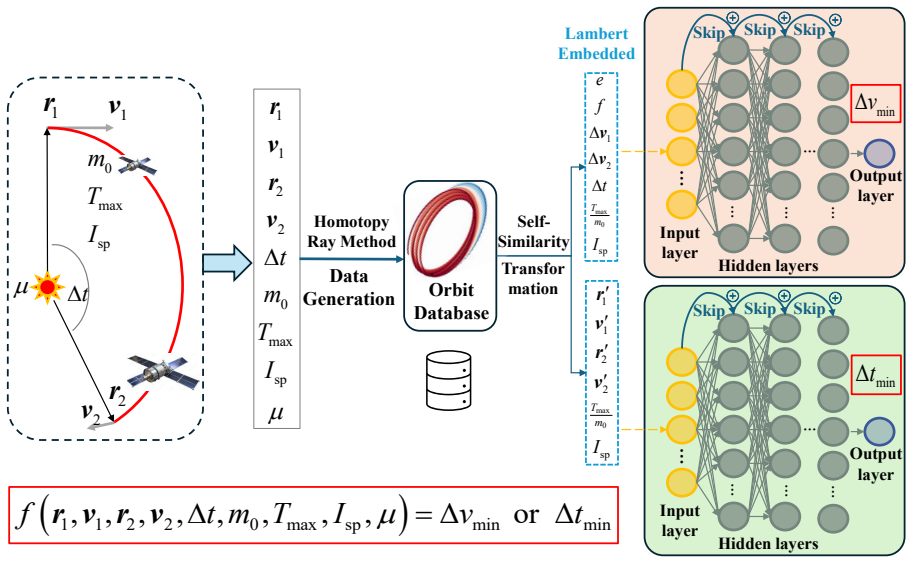
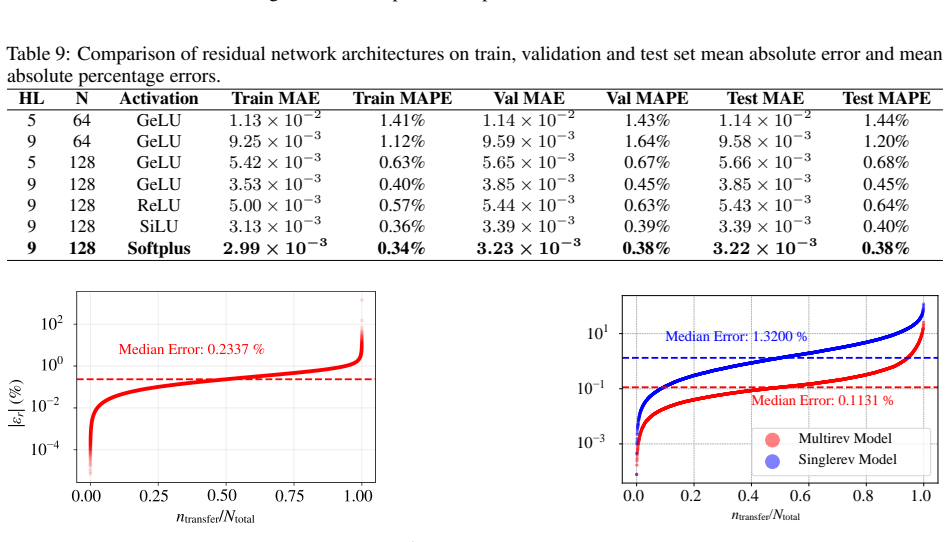
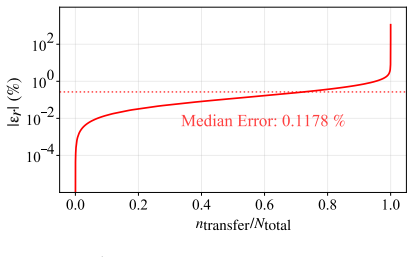
Low-thrust trajectory optimization follows a scaling law in which approximation accuracy for optimal fuel consumption and minimum transfer time rises linearly with the log of dataset size and model capacity; a self-similar transformation applied to homotopy-ray data enables the identical neural model to generalize to new semi-major axes, inclinations, and central bodies without retraining.
What carries the argument
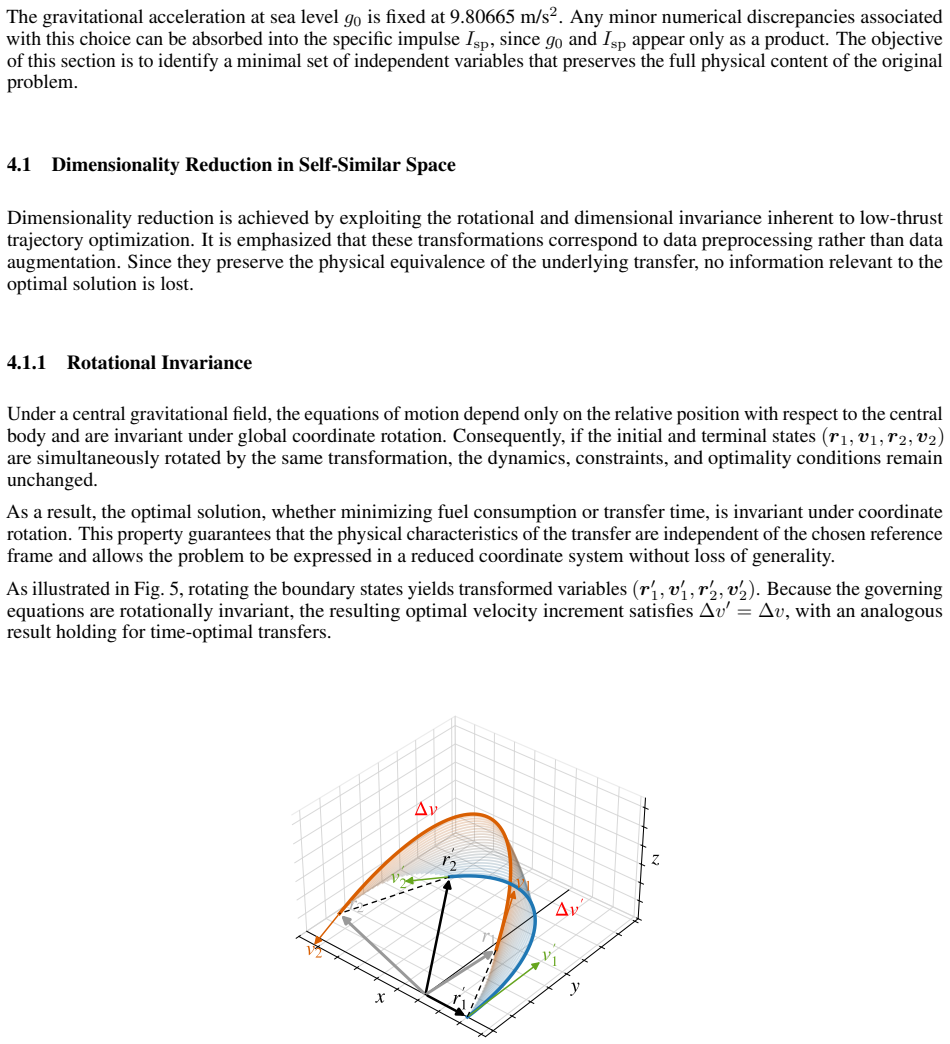
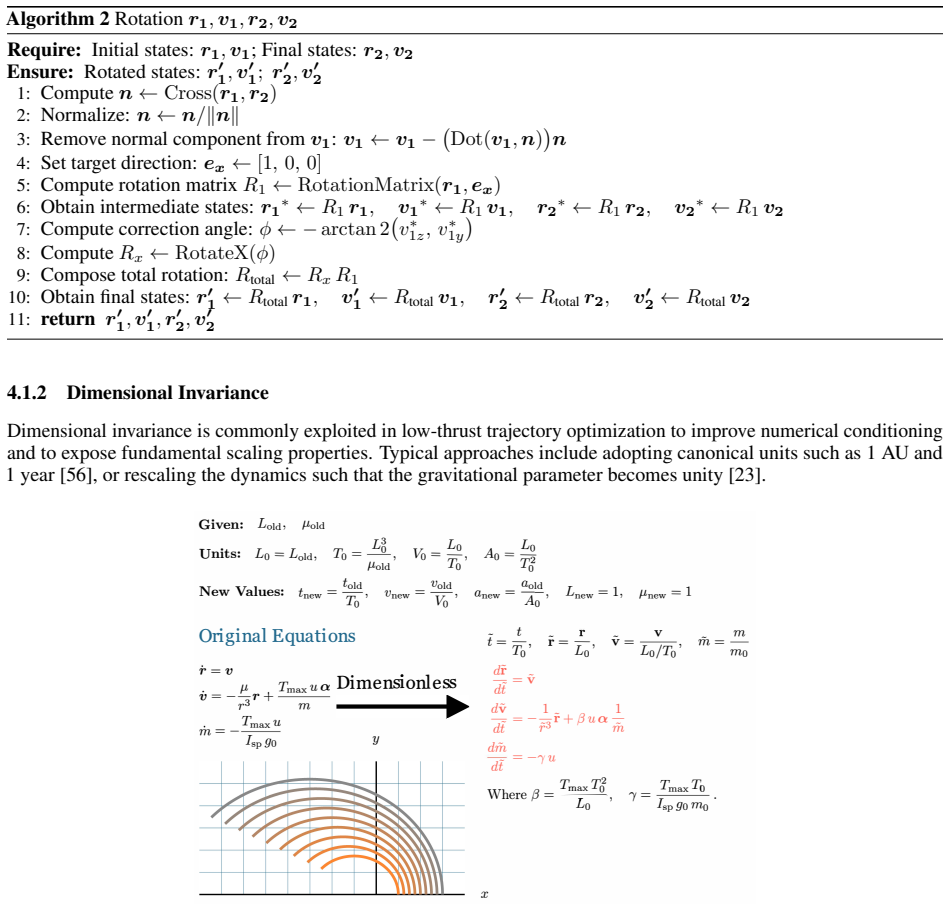
The self-similar transformation that normalizes the homotopy-ray dataset so a single network can generalize across varying semi-major axes, inclinations, and central bodies.
If this is right
- The same pretrained model predicts costs for both single- and multi-revolution transfers in asteroid flyby and rendezvous missions.
- Accuracy continues to rise with additional data and larger networks inside the explored regime.
- One model serves multiple mission classes and central bodies without retraining.
- Open release of models and datasets enables direct use in existing trajectory design pipelines.
Where Pith is reading between the lines
- Embedding these surrogates inside iterative optimizers would cut the cost of repeated trajectory evaluations by orders of magnitude.
- The scaling behavior suggests that further gains remain available simply by increasing compute rather than redesigning the architecture.
- Analogous surrogate-plus-scaling approaches could be tested on other optimal-control problems that currently rely on repeated expensive solves.
Load-bearing premise
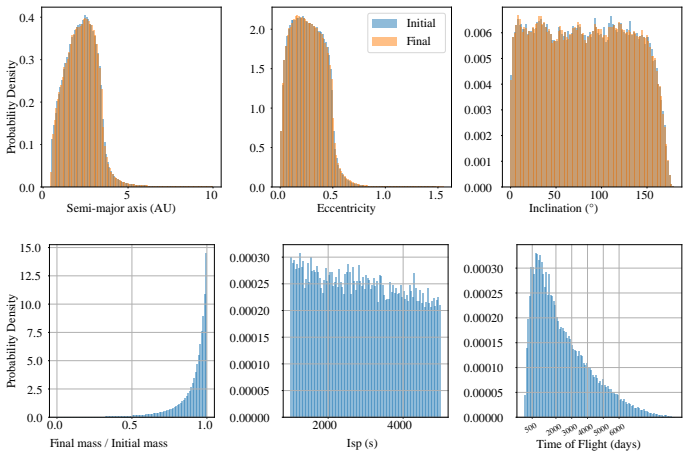
The homotopy-ray strategy produces training examples whose coverage is broad enough for the observed scaling law to continue and for generalization to hold on unseen orbital parameters and central bodies.
What would settle it
Measuring whether approximation error stops decreasing or begins to rise when the training set is enlarged by another factor of ten or when the model is tested on transfers around a central body absent from the training distribution.
Figures

read the original abstract
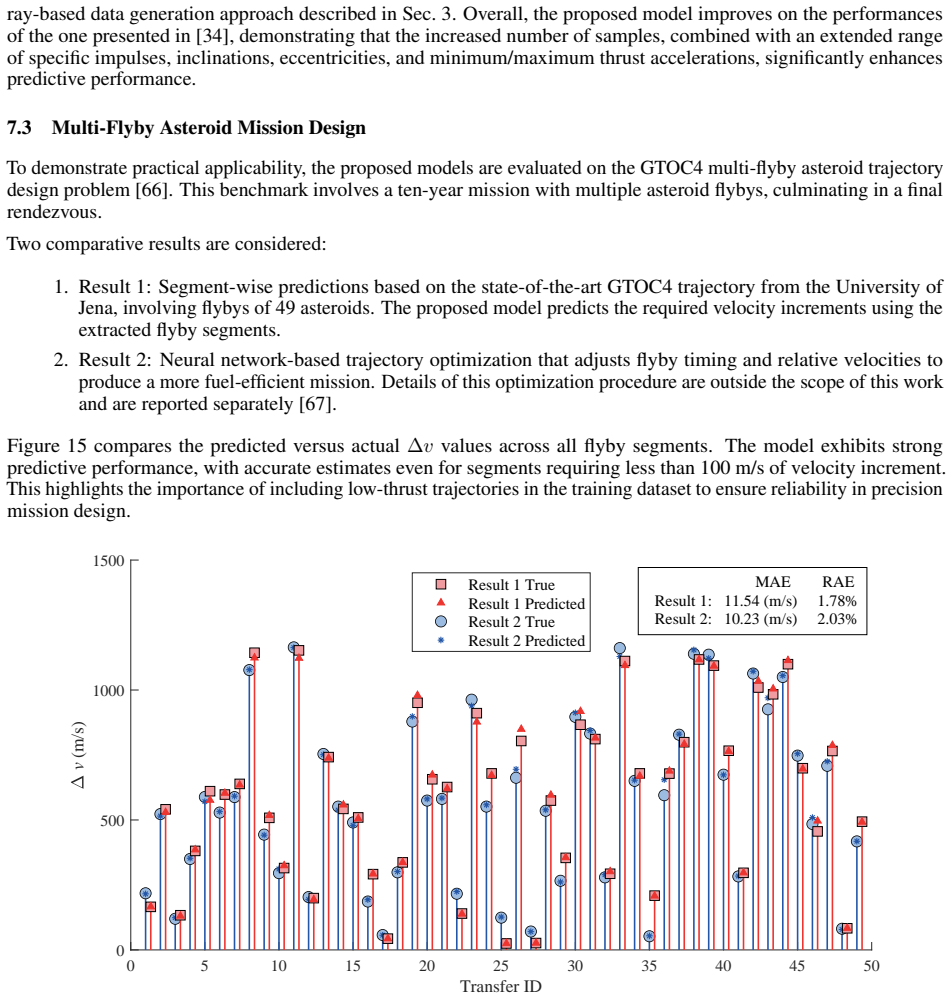
Low-thrust trajectory design relies heavily on repeated evaluations of fuel consumption and transfer feasibility, which require expensive optimal control solutions. In this work, we show these quantities can be accurately approximated by machine learning surrogates, enabling fast and scalable evaluation across a wide range of scenarios. By increasing both dataset size and model capacity, we observe that low-thrust trajectory optimization follows a scaling law, with performance improving linearly with the logarithm of training data and network parameters, and no evidence of saturation within the explored regime. Guided by this observation, we construct a large-scale dataset using the proposed homotopy-ray strategy tailored to mission design requirements. A key is the introduction of a self-similar transformation, which allows generalization across semi-major axes, inclinations, and central bodies avoiding retraining. As a result, the same neural approximator can be applied to diverse orbital environments and mission classes. The proposed models accurately predict optimal fuel consumption and minimum transfer time for single- and multi-revolution transfers. Their performance and generalization are demonstrated on a public dataset, a multi-asteroid flyby problem from the Global Trajectory Optimization Competition, and an asteroid rendezvous mission design. The models and datasets are released as open-source to support the space community.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that neural network surrogates can accurately approximate optimal fuel consumption and minimum transfer time for low-thrust single- and multi-revolution trajectories. A homotopy-ray dataset generation strategy combined with a self-similar transformation is introduced to enable generalization across semi-major axes, inclinations, and central bodies without retraining. The authors report an empirical scaling law in which approximation performance improves linearly with the logarithm of training set size and network parameters, with no saturation observed in the explored regime. Results are demonstrated on a public dataset, a GTOC multi-asteroid flyby problem, and an asteroid rendezvous mission, with models and datasets released as open source.
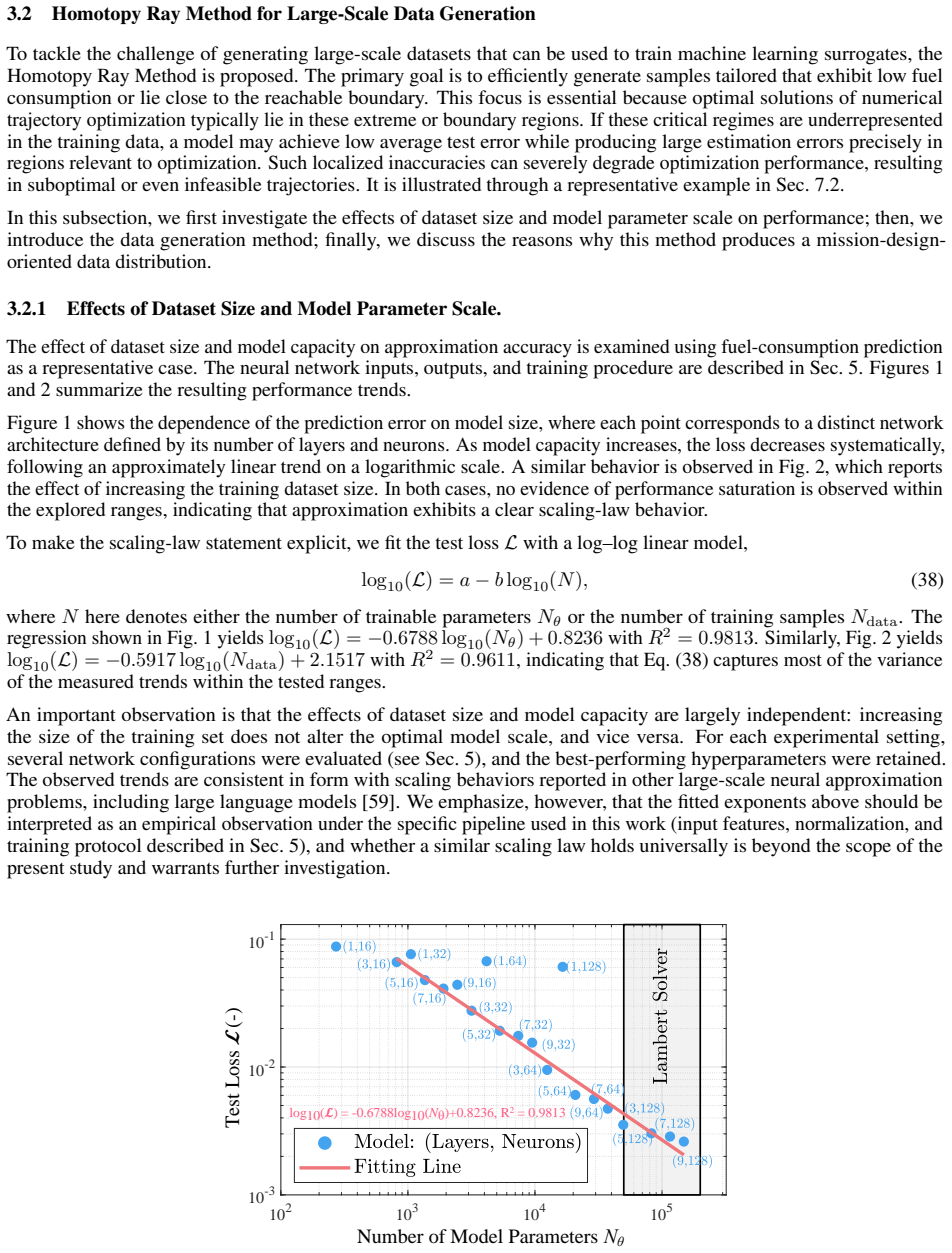
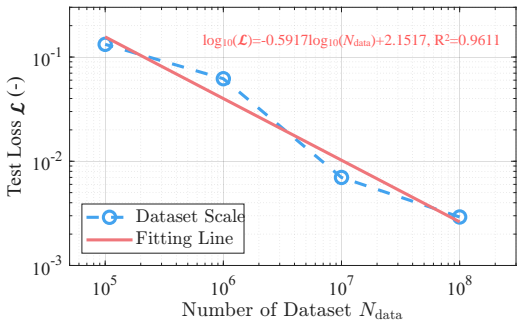
Significance. If the reported accuracy and scaling behavior prove robust, the work could enable substantially faster evaluation of low-thrust costs and reachability in mission design loops. The open-source release of models and datasets is a concrete strength that supports reproducibility and community follow-on work.
major comments (2)
- [Abstract] Abstract: the headline claim of linear scaling with log(training data) and log(network parameters) and the generalization claim both rest on the assumption that the homotopy-ray dataset plus self-similar mapping provides sufficient coverage; the abstract supplies no quantitative error distributions, validation splits, ablation on the sampling strategy, or coverage metrics (e.g., convex-hull volume or KS distances to test distributions) to substantiate this.
- [Results] The central empirical results are fits to a generated dataset; without reported validation splits or ablation studies on the homotopy-ray procedure, it is not possible to determine whether the observed scaling and zero-shot generalization to arbitrary inclinations and revolutions are load-bearing or artifacts of interpolation within the training distribution.
Simulated Author's Rebuttal
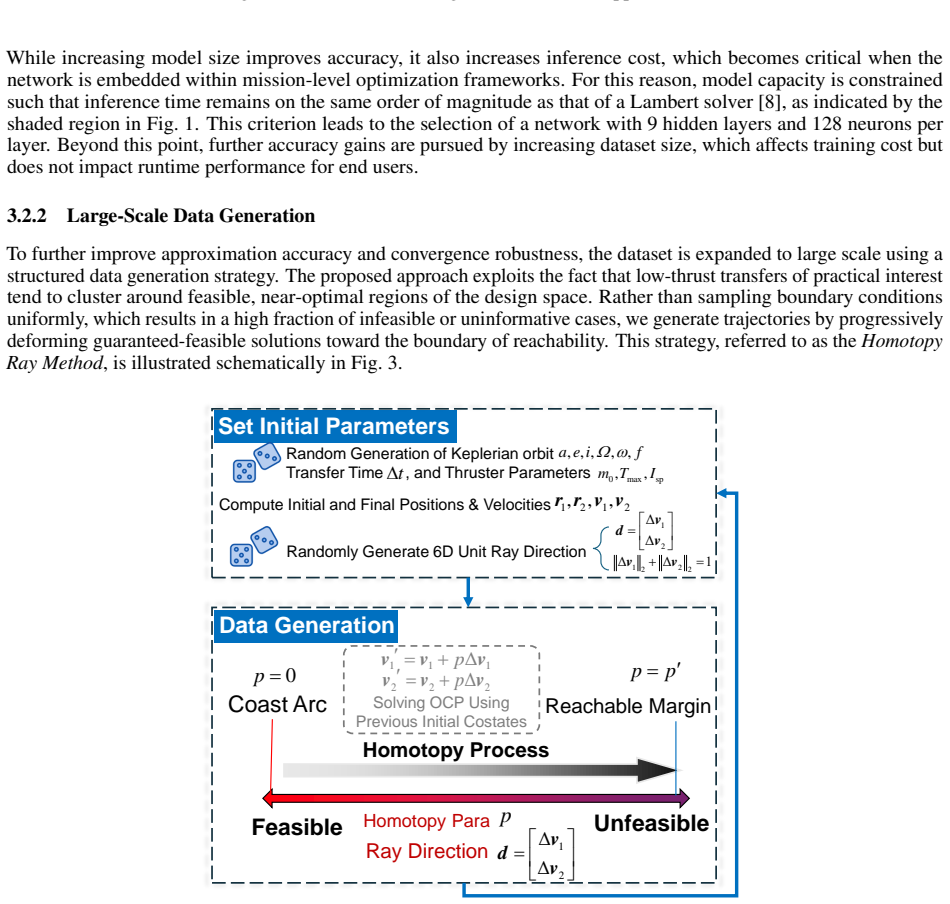
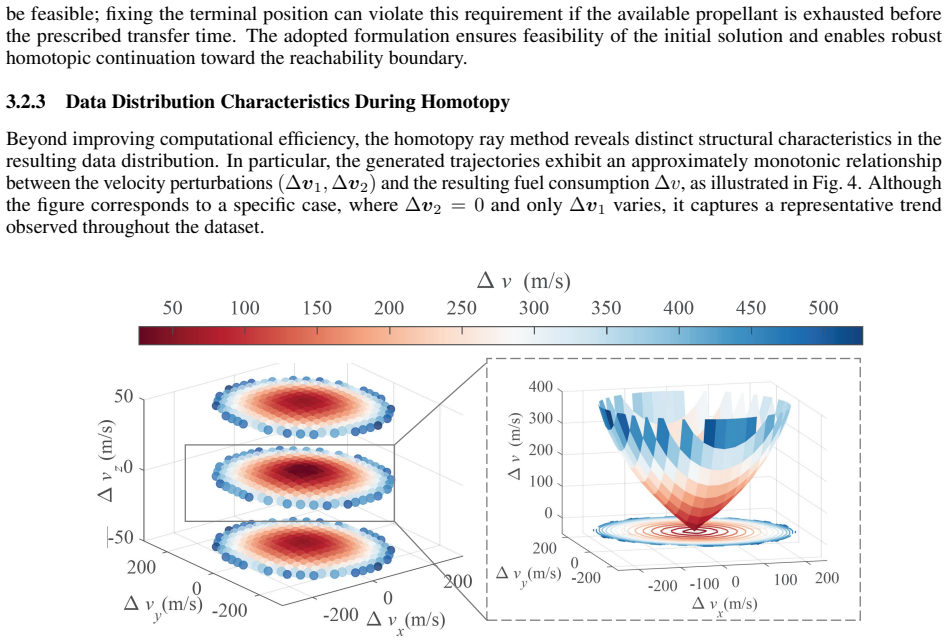
We thank the referee for the detailed review and constructive feedback on the abstract and empirical validation. We agree that additional quantitative details on validation, coverage, and ablations would strengthen the presentation of the scaling law and generalization claims. We will revise the manuscript accordingly while maintaining that the self-similar transformation and out-of-distribution tests on GTOC and rendezvous missions provide substantive support beyond pure interpolation.
read point-by-point responses
-
Referee: [Abstract] Abstract: the headline claim of linear scaling with log(training data) and log(network parameters) and the generalization claim both rest on the assumption that the homotopy-ray dataset plus self-similar mapping provides sufficient coverage; the abstract supplies no quantitative error distributions, validation splits, ablation on the sampling strategy, or coverage metrics (e.g., convex-hull volume or KS distances to test distributions) to substantiate this.
Authors: We acknowledge the abstract is concise and omits these specifics. The full paper reports mean relative errors below 1% on held-out test points from the public dataset, plus successful zero-shot application to GTOC multi-asteroid and rendezvous cases with different inclinations and revolution counts. We will revise the abstract to include key quantitative error statistics, mention the train/test split used for scaling experiments, and note that coverage is ensured by the homotopy-ray sampling density and self-similar normalization. Revision will be made. revision: yes
-
Referee: [Results] The central empirical results are fits to a generated dataset; without reported validation splits or ablation studies on the homotopy-ray procedure, it is not possible to determine whether the observed scaling and zero-shot generalization to arbitrary inclinations and revolutions are load-bearing or artifacts of interpolation within the training distribution.
Authors: The results are generated via the homotopy-ray procedure, but the paper already demonstrates generalization on two external mission scenarios (GTOC flyby and asteroid rendezvous) whose inclination and revolution distributions differ from the training set. The self-similar transformation is derived from orbital mechanics and enables the observed zero-shot behavior. We agree that explicit validation splits (e.g., 80/20) and ablations on ray density and homotopy parameters were not reported and will add them in revision. We maintain the scaling law and generalization are not artifacts, as performance continues to improve with scale and transfers to dissimilar problems succeed. revision: partial
Circularity Check
No circularity: empirical ML fits on generated data with independent test evaluation
full rationale
The paper generates a dataset via homotopy-ray sampling plus self-similar transform, trains neural approximators, and reports empirical accuracy plus log-linear scaling on held-out public datasets, GTOC instances, and asteroid rendezvous cases. No equation, prediction, or central claim reduces to a fitted parameter or self-citation by construction; the reported performance is measured against external benchmarks rather than being forced by the training procedure itself. Self-citation, if present, is not load-bearing for the scaling or generalization results.
Axiom & Free-Parameter Ledger
free parameters (1)
- neural network weights and biases
axioms (1)
- domain assumption The self-similar transformation maps the optimal-control problem identically across different semi-major axes, inclinations, and central bodies.
Reference graph
Works this paper leans on
-
[1]
M. D. Rayman, P. A. Chadbourne, J. S. Culwell, S. N. Williams, Mission design for deep space 1: A low-thrust technology validation mission, Acta Astronautica 45 (4) (1999) 381–388. doi:10.1016/S0094-5765(99) 00157-5
-
[2]
J. Kawaguchi, A. Fujiwara, T. Uesugi, Hayabusa—Its technology and science accomplishment summary and Hayabusa-2, Acta Astronautica 62 (10) (2008) 639–647.doi:10.1016/j.actaastro.2008.01.028. 30
-
[3]
J. Benkhoff, J. van Casteren, H. Hayakawa, M. Fujimoto, H. Laakso, M. Novara, P. Ferri, H. R. Middleton, R. Ziethe, BepiColombo—Comprehensive exploration of Mercury: Mission overview and science goals, Planetary and Space Science 58 (1) (2010) 2–20.doi:10.1016/j.pss.2009.09.020
-
[4]
D. Y . Oh, S. Collins, T. Drain, W. Hart, T. Imken, K. Larson, D. Marsh, D. Muthulingam, J. S. Snyder, D. Trofimov, Development of the Psyche mission for NASA’s discovery program, in: 36th International Electric Propulsion Conference, Vienna, Austria, 2019, iEPC-2019-192
2019
-
[5]
Zhang, N
Z. Zhang, N. Zhang, X. Guo, D. Wu, X. Xie, J. Yang, F. Jiang, H. Baoyin, Sustainable Asteroid Mining: On the design of GTOC12 problem and summary of results, Astrodynamics 9 (1) (2025) 3–17. doi:10.1007/ s42064-024-0199-3
2025
-
[6]
Z. Zhang, N. Zhang, Z. Chen, F. Jiang, H. Baoyin, J. Li, Global Trajectory Optimization of Multispacecraft Successive Rendezvous Using Multitree Search, Journal of Guidance, Control, and Dynamics 47 (3) (2024) 503–517.doi:10.2514/1.G007764
-
[7]
T. N. Edelbaum, Propulsion requirements for controllable satellites, ARS Journal 31 (8) (1961) 1079–1089. doi:10.2514/8.5723
-
[8]
Izzo, Revisiting Lambert’s problem, Celestial Mechanics and Dynamical Astronomy 121 (1) (2015) 1–15
D. Izzo, Revisiting Lambert’s problem, Celestial Mechanics and Dynamical Astronomy 121 (1) (2015) 1–15. doi:10.1007/s10569-014-9587-y
-
[9]
R. M. Woollands, A. Bani Younes, J. L. Junkins, New solutions for the perturbed lambert problem using regularization and picard iteration, Journal of Guidance, Control, and Dynamics 38 (9) (2015) 1548–1562. doi:10.2514/1.G001028
-
[10]
R. P. Russell, Complete Lambert Solver Including Second-Order Sensitivities, Journal of Guidance, Control, and Dynamics 45 (2) (2022) 196–212.doi:10.2514/1.G006089
-
[11]
B. J. Wall, B. A. Conway, Shape-Based Approach to Low-Thrust Rendezvous Trajectory Design, Journal of Guidance, Control, and Dynamics 32 (1) (2009) 95–101.doi:10.2514/1.36848
-
[12]
D. Wu, T. Zhang, Y . Zhong, F. Jiang, J. Li, Analytical shaping method for low-thrust rendezvous trajectory using cubic spline functions, Acta Astronautica 193 (2022) 511–520.doi:10.1016/j.actaastro.2022.01.019
-
[13]
P. Gurfil, Analysis of J2-perturbed motion using mean non-osculating orbital elements, Celestial Mechanics and Dynamical Astronomy 90 (3) (2004) 289–306.doi:10.1007/s10569-004-0890-x
-
[14]
L. Casalino, Approximate optimization of low-thrust transfers between low-eccentricity close orbits, Journal of Guidance, Control, and Dynamics 37 (3) (2014) 1003–1008.doi:10.2514/1.62046
-
[15]
D. Hennes, D. Izzo, D. Landau, Fast approximators for optimal low-thrust hops between main belt asteroids, in: 2016 IEEE Symposium Series on Computational Intelligence (SSCI), IEEE, Athens, Greece, 2016, pp. 1–7. doi:10.1109/SSCI.2016.7850107
-
[16]
H. Shen, L. Casalino, Simple ∆V approximation for optimization of debris-to-debris transfers, Journal of Spacecraft and Rockets 58 (2) (2021) 575–580.doi:10.2514/1.A34831
-
[17]
A. Petropoulos, D. Grebow, D. Jones, G. Lantoine, A. Nicholas, J. Roa, J. Senent, J. Stuart, N. Arora, T. Pavlak, T. Lam, T. McElrath, R. Roncoli, D. Garza, N. Bradley, D. Landau, Z. Tarzi, F. Laipert, E. Bonfiglio, M. Wallace, J. Sims, GTOC9: Results from the Jet Propulsion Laboratory (team JPL), Acta Futura 11 (2018) 25–35. doi: 10.5281/zenodo.1139152
-
[18]
Z. Zhang, N. Zhang, X. Guo, D. Wu, X. Xie, J. Li, J. Yang, S. Chen, F. Jiang, H. Baoyin, H. Li, H. Zheng, X. Duan, GTOC 11: Results from Tsinghua University and Shanghai Institute of Satellite Engineering, Acta Astronautica 202 (2023) 819–828.doi:10.1016/j.actaastro.2022.06.028
-
[19]
J. Park, I. W. Sandberg, Universal Approximation Using Radial-Basis-Function Networks, Neural Computation 3 (2) (1991) 246–257.doi:10.1162/neco.1991.3.2.246
-
[20]
N. Harl, K. Rajagopal, S. N. Balakrishnan, Neural Network Based Modified State Observer for Orbit Uncertainty Estimation, Journal of Guidance, Control, and Dynamics 36 (4) (2013) 1194–1209.doi:10.2514/1.55711
-
[21]
Wilson, M
C. Wilson, M. Vasile, Generation and classification of critical points in uncertain N-body problems via machine learning, in: 75th International Astronautical Congress (IAC 2024), Milan, Italy, 2024, pp. IAC–24–C1.9.8
2024
-
[22]
L. Federici, A. Scorsoglio, L. Ghilardi, A. D’Ambrosio, B. Benedikter, A. Zavoli, R. Furfaro, Image-Based Meta-Reinforcement Learning for Autonomous Guidance of an Asteroid Impactor, Journal of Guidance, Control, and Dynamics 45 (11) (2022) 2013–2028.doi:10.2514/1.G006832
-
[23]
D. Izzo, E. Öztürk, Real-Time Guidance for Low-Thrust Transfers Using Deep Neural Networks, Journal of Guidance, Control, and Dynamics 44 (2) (2021) 315–327.doi:10.2514/1.G005254. 31
-
[24]
D. Izzo, S. Origer, Neural representation of a time optimal, constant acceleration rendezvous, Acta Astronautica 204 (2023) 510–517.doi:10.1016/j.actaastro.2022.08.045
-
[25]
M. Pugliatti, A. Scorsoglio, R. Furfaro, F. Topputo, Onboard State Estimation Around Didymos With Recurrent Neural Networks and Segmentation Maps, IEEE Transactions on Aerospace and Electronic Systems 60 (3) (2024) 2542–2554.doi:10.1109/TAES.2023.3288506
-
[26]
G. Acciarini, A. G. Baydin, D. Izzo, Closing the gap between sgp4 and high-precision propagation via differentiable programming, Acta Astronautica 226 (2025) 694–701.doi:10.1016/j.actaastro.2024.10.063
-
[27]
D. Izzo, E. Blazquez, R. Ferede, S. Origer, C. D. Wagter, G. C. H. E. de Croon, Optimality principles in spacecraft neural guidance and control, Science Robotics 9 (91) (2024) 6421.doi:10.1126/scirobotics.adi6421
-
[28]
Y . Zhu, Y . Luo, Fast Evaluation of Low-Thrust Transfers via Multilayer Perceptions, Journal of Guidance, Control, and Dynamics 42 (12) (2019) 2627–2637.doi:10.2514/1.G004080
-
[29]
A. Mereta, D. Izzo, A. Wittig, Machine learning of optimal low-thrust transfers between near-earth objects, in: F. J. Martínez de Pisón, R. Urraca, H. Quintián, E. Corchado (Eds.), Hybrid Artificial Intelligent Systems, Springer International Publishing, Cham, 2017, pp. 543–553.doi:10.1007/978-3-319-59650-1_46
-
[30]
H. Li, S. Chen, D. Izzo, H. Baoyin, Deep networks as approximators of optimal low-thrust and multi-impulse cost in multitarget missions, Acta Astronautica 166 (2020) 469–481.doi:10.1016/j.actaastro.2019.09.023
-
[31]
R. Xie, A. G. Dempster, An on-line deep learning framework for low-thrust trajectory optimisation, Aerospace Science and Technology 118 (2021) 107002.doi:10.1016/j.ast.2021.107002
-
[32]
X. Guo, D. Ren, D. Wu, F. Jiang, DNN estimation of low-thrust transfer time: Focusing on fast transfers in multi-asteroid rendezvous missions, Acta Astronautica 204 (2023) 518–530. doi:10.1016/j.actaastro. 2022.09.006
-
[33]
A. H. Mughal, P. Chadalavada, A. Munir, A. Dutta, M. A. Qureshi, Design of deep neural networks for transfer time prediction of spacecraft electric orbit-raising, Intelligent Systems with Applications 15 (2022) 200092. doi:10.1016/j.iswa.2022.200092
-
[34]
G. Acciarini, L. Beauregard, D. Izzo, Computing low-thrust transfers in the asteroid belt, a comparison between astrodynamical manipulations and a machine learning approach, in: 29th International Symposium on Space Flight Dynamics (ISSFD 2024), Darmstadt, Germany, 2024.doi:10.48550/arXiv.2405.18918
-
[35]
Y . Song, S. Gong, Solar-sail trajectory design for multiple near-earth asteroid exploration based on deep neural networks, Aerospace Science and Technology 91 (2019) 28–40.doi:10.1016/j.ast.2019.04.056
-
[36]
A. Huang, S. Wu, Neural network-based approximation model for perturbed orbit rendezvous, Mathematics 10 (14).doi:10.3390/math10142489
-
[38]
C. Sánchez-Sánchez, D. Izzo, D. Hennes, Learning the optimal state-feedback using deep networks, in: 2016 IEEE Symposium Series on Computational Intelligence (SSCI), 2016, pp. 1–8. doi:10.1109/SSCI.2016.7850105
- [39]
-
[40]
L. Cheng, Z. Wang, Y . Song, F. Jiang, Real-time optimal control for irregular asteroid landings using deep neural networks, Acta Astronautica 170 (2020) 66–79.doi:10.1016/j.actaastro.2019.11.039
-
[41]
L. Cheng, Z. Wang, F. Jiang, C. Zhou, Real-time optimal control for spacecraft orbit transfer via multiscale deep neural networks, IEEE Transactions on Aerospace and Electronic Systems 55 (5) (2018) 2436–2450. doi:10.1109/TAES.2018.2889571
-
[42]
E. Gaglio, R. Bevilacqua, Machine learning-based quasi-optimal feedback control for a propellantless re-entry, Acta Astronautica 228 (2025) 274–284.doi:10.1016/j.actaastro.2024.11.047
-
[43]
D. Tailor, D. Izzo, Learning the optimal state-feedback via supervised imitation learning, Astrodynamics 3 (4) (2019) 361–374.doi:10.1007/s42064-019-0054-0
-
[44]
L. Federici, B. Benedikter, A. Zavoli, Deep learning techniques for autonomous spacecraft guidance during proximity operations, Journal of Spacecraft and Rockets 58 (6) (2021) 1774–1785.doi:10.2514/1.A35076
-
[45]
B. Gaudet, R. Linares, R. Furfaro, Deep reinforcement learning for six degree-of-freedom planetary landing, Advances in Space Research 65 (7) (2020) 1723–1741.doi:10.1016/j.asr.2019.12.030. 32
-
[46]
B. Gaudet, R. Linares, R. Furfaro, Adaptive guidance and integrated navigation with reinforcement meta-learning, Acta Astronautica 169 (2020) 180–190.doi:10.1016/j.actaastro.2020.01.007
-
[47]
A. Evans, R. Armellin, H. Holt, L. Pirovano, Fuel-optimal guidance using costate supervised learning with local refinement, Acta Astronautica 228 (2025) 17–29.doi:10.1016/j.actaastro.2024.11.031
-
[48]
H. Holt, R. Armellin, Reinforcement learning enhanced lqr and control lyapunov functions for spacecraft proximity operations, IEEE Transactions on Robotics 41 (2025) 5117–5129.doi:10.1109/TRO.2025.3600160
-
[49]
H. Holt, N. Baresi, R. Armellin, Reinforced lyapunov controllers for low-thrust lunar transfers, Astrodynamics 8 (4) (2024) 633–656.doi:10.1007/s42064-024-0212-x
-
[50]
Z. Sun, Z. Zhang, L. Cheng, D. Wu, S. Gong, Guaranteed safety and stability neural guidance for asteroid landing under collision avoidance constraints, Aerospace Science and Technology (2025) 110758doi:10.1016/j.ast. 2025.110758
-
[51]
D. Izzo, S. Origer, G. Acciarini, F. Biscani, High-order expansion of neural ordinary differential equation flows, Science Advances 11 (51) (2025) eady1348.doi:10.1126/sciadv.ady1348
-
[52]
M. J. H. Walker, B. Ireland, J. Owens, A set modified equinoctial orbit elements, Celestial mechanics 36 (4) (1985) 409–419.doi:10.1007/BF01227493
-
[53]
J. L. Junkins, E. Taheri, Exploration of Alternative State Vector Choices for Low-Thrust Trajectory Optimization, Journal of Guidance, Control, and Dynamics 42 (1) (2019) 47–64.doi:10.2514/1.G003686
-
[54]
Y . Gao, C. Kluever, Low-Thrust Interplanetary Orbit Transfers Using Hybrid Trajectory Optimization Method with Multiple Shooting, in: AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Guidance, Navigation, and Control and Co-located Conferences, American Institute of Aeronautics and Astronautics, 2004. doi: 10.2514/6.2004-5088
-
[55]
R. Bertrand, R. Epenoy, New smoothing techniques for solving bang–bang optimal control problems—numerical results and statistical interpretation, Optimal Control Applications and Methods 23 (4) (2002) 171–197. doi: 10.1002/oca.709
-
[56]
F. Jiang, H. Baoyin, J. Li, Practical Techniques for Low-Thrust Trajectory Optimization with Homotopic Approach, Journal of Guidance, Control, and Dynamics 35 (1) (2012) 245–258.doi:10.2514/1.52476
-
[57]
J. J. Moré, B. S. Garbow, K. E. Hillstrom, User guide for MINPACK-1, Tech. rep., Argonne National Lab., IL (USA) (Aug. 1980).doi:10.2172/6997568
-
[58]
W. S. Levine, The Control Systems Handbook: Control System Advanced Methods, Second Edition, CRC Press, United States, 2018
2018
-
[59]
Scaling Laws for Neural Language Models
J. Kaplan, S. McCandlish, T. Henighan, T. B. Brown, B. Chess, R. Child, S. Gray, A. Radford, J. Wu, D. Amodei, Scaling laws for neural language models, arXiv preprintdoi:10.48550/arXiv.2001.08361
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2001.08361 2001
-
[60]
Loshchilov, F
I. Loshchilov, F. Hutter, Decoupled Weight Decay Regularization, in: International Conference on Learning Representations, New Orleans, LA, USA, 2019
2019
-
[61]
R. Llugsi, S. E. Yacoubi, A. Fontaine, P. Lupera, Comparison between Adam, AdaMax and Adam W optimizers to implement a Weather Forecast based on Neural Networks for the Andean city of Quito, in: 2021 IEEE Fifth Ecuador Technical Chapters Meeting (ETCM), 2021, pp. 1–6.doi:10.1109/ETCM53643.2021.9590681
-
[62]
L. N. Smith, N. Topin, Super-convergence: Very fast training of neural networks using large learning rates, in: Artificial Intelligence and Machine Learning for Multi-Domain Operations Applications, V ol. 11006, SPIE, 2019, pp. 369–386.doi:10.1117/12.2520589
-
[63]
E. Taheri, J. L. Junkins, How Many Impulses Redux, The Journal of the Astronautical Sciences 67 (2) (2020) 257–334.doi:10.1007/s40295-019-00203-1
-
[64]
X. Guo, D. Wu, F. Jiang, Minimum-Time Rendezvous via Simplified Initial Costate Normalization and Auxiliary Orbital Transfer, Journal of Guidance, Control, and Dynamics 46 (8) (2023) 1627–1636. doi:10.2514/1. G007268
work page doi:10.2514/1 2023
-
[65]
K. He, X. Zhang, S. Ren, J. Sun, Deep residual learning for image recognition, in: 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), IEEE, IEEE Computer Society, Las Vegas, NV , USA, 2016, pp. 770–778.doi:10.1109/CVPR.2016.90
-
[66]
I. S. Grigoriev, M. P. Zapletin, Choosing promising sequences of asteroids, Automation and Remote Control 74 (8) (2013) 1284–1296.doi:10.1134/S0005117913080055
-
[67]
Z. Zhang, X. Guo, D. Wu, H. Baoyin, J. Li, F. Topputo, Global optimality in multi-flyby asteroid trajectory optimization: Theory and application techniques, Journal of Guidance, Control, and Dynamics Online (2026) 1–16.doi:10.2514/1.G009335. 33
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.