Bridging the Sim-to-Real Gap in Reinforcement Learning-Based Industrial Dispatching through Execution Semantics
Pith reviewed 2026-06-29 12:01 UTC · model grok-4.3
The pith
A policy-neutral execution layer records divergences between policy intent and physical results to make industrial RL deployment mismatches observable and attributable.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed framework introduces a policy-neutral execution and measurement layer to mediate between scheduling policies and the industrial execution environment. The layer constructs decision-valid snapshots from asynchronous event streams, defines a standardized execution contract with explicit action admissibility, and records outcomes as divergences between policy intent, transactional outcomes, physical execution, and human intervention. This enables separation between decision semantics and execution behavior and makes deployment mismatch observable and structurally attributable. The framework turns execution uncertainty into supervisory data for evaluation and policy refinement.
What carries the argument
The policy-neutral execution and measurement layer, which constructs snapshots from event streams, defines an execution contract, and records typed divergences to separate decision semantics from execution behavior.
If this is right
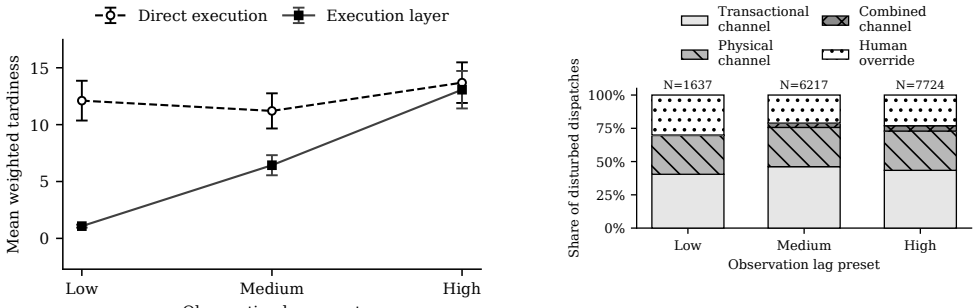
- Undifferentiated execution failures are transformed into structured, typed outcomes with full attribution coverage.
- Analytical benefits are obtained across all observation lag regimes.
- Operational benefits are strongest under low observation lag, where avoidable execution errors can be prevented before commitment.
- Execution uncertainty is converted into supervisory data usable for policy evaluation and refinement.
Where Pith is reading between the lines
- The same layer structure could support attribution in other asynchronous RL settings such as robotic control or network routing.
- Typed divergence data might enable automated detection of recurring mismatch patterns for targeted policy updates.
- Real-world use would require confirming that the added layer does not itself increase latency or create new attribution blind spots.
Load-bearing premise
A standardized policy-neutral execution contract can be defined and divergences between policy intent, transactional outcomes, physical execution, and human intervention can be recorded accurately without introducing new errors or latency.
What would settle it
A controlled industrial deployment in which recorded divergences are cross-checked against independent ground-truth logs of execution causes to verify whether attribution matches actual failure sources and covers all cases.
Figures
read the original abstract
Event-driven scheduling policies are increasingly deployed in industrial environments, where decisions are made under asynchronous and partially observed system states. As a result, decision states are not temporally consistent, action admissibility is not explicitly defined, and the origin of execution errors remains ambiguous. These issues limit both reliability and interpretability. To address this gap, a policy-neutral execution and measurement layer is proposed to mediate between scheduling policies and the industrial execution environment. The layer constructs decision-valid snapshots from asynchronous event streams, defines a standardized execution contract with explicit action admissibility, and records outcomes as divergences between policy intent, transactional outcomes, physical execution, and human intervention. This enables a separation between decision semantics and execution behavior and makes deployment mismatch observable and structurally attributable. The proposed framework is evaluated using a discrete-event simulation. The results show analytical benefits across all observation lag regimes, as undifferentiated execution failures are transformed into structured, typed outcomes with full attribution coverage. Operational benefits are strongest under low observation lag, where avoidable execution errors can be prevented before commitment. Overall, the layer turns execution uncertainty into supervisory data for evaluation and policy refinement.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a policy-neutral execution and measurement layer to mediate between event-driven RL scheduling policies and industrial execution environments. The layer builds decision-valid snapshots from asynchronous event streams, defines a standardized execution contract with explicit action admissibility, and records outcomes as divergences among policy intent, transactional results, physical execution, and human intervention. This separation is claimed to make deployment mismatches observable and structurally attributable. The framework is evaluated in a discrete-event simulation, where it converts undifferentiated execution failures into typed outcomes with full attribution coverage, yielding analytical benefits across observation lag regimes and operational benefits under low lag.
Significance. If the execution contract can be implemented in real industrial settings without introducing latency or recording errors, the approach would supply structured supervisory data for policy refinement and improve interpretability of RL dispatching under partial observability. The conceptual distinction between decision semantics and execution behavior targets a known sim-to-real challenge in asynchronous industrial systems. The manuscript provides no machine-checked proofs or reproducible code, and the evaluation remains confined to simulation.
major comments (2)
- [Abstract] Abstract (evaluation paragraph): The central claim that the layer bridges the sim-to-real gap by making deployment mismatches observable and attributable in real environments is load-bearing, yet the evaluation occurs only inside a discrete-event simulator in which both policy decisions and execution semantics are generated by the same model. No physical hardware, sensor noise, or human interventions outside the modeled contract are present, so the results demonstrate only intra-sim attribution improvements and leave the assumption that a policy-neutral contract can be realized without new errors or latency untested.
- [Abstract] Abstract (layer description): The claim that divergences between policy intent, transactional outcomes, physical execution, and human intervention can be recorded accurately rests on the existence of a standardized, policy-neutral execution contract; the simulation does not introduce external physical divergences, so it cannot validate that the layer records such divergences without introducing new measurement artifacts in actual deployments.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting the scope of our evaluation. We respond point by point to the major comments below.
read point-by-point responses
-
Referee: [Abstract] Abstract (evaluation paragraph): The central claim that the layer bridges the sim-to-real gap by making deployment mismatches observable and attributable in real environments is load-bearing, yet the evaluation occurs only inside a discrete-event simulator in which both policy decisions and execution semantics are generated by the same model. No physical hardware, sensor noise, or human interventions outside the modeled contract are present, so the results demonstrate only intra-sim attribution improvements and leave the assumption that a policy-neutral contract can be realized without new errors or latency untested.
Authors: We agree that the evaluation is confined to discrete-event simulation and does not incorporate physical hardware, sensor noise, or unmodeled interventions. The manuscript's contribution centers on defining a policy-neutral execution layer whose attribution mechanisms can be validated internally before deployment; the simulation confirms that undifferentiated failures become typed, attributable outcomes. We acknowledge that demonstrating the contract can be realized in physical systems without introducing latency or recording errors requires separate empirical study, which lies outside the present scope. We will revise the abstract to qualify the bridging claim as a design objective supported by simulation evidence rather than a fully validated real-world outcome. revision: yes
-
Referee: [Abstract] Abstract (layer description): The claim that divergences between policy intent, transactional outcomes, physical execution, and human intervention can be recorded accurately rests on the existence of a standardized, policy-neutral execution contract; the simulation does not introduce external physical divergences, so it cannot validate that the layer records such divergences without introducing new measurement artifacts in actual deployments.
Authors: The simulation validates the layer's ability to apply the contract consistently and produce complete attribution within the modeled environment. Because the contract is defined to be policy-neutral and interface-based, it is intended to be realized by mapping to industrial control and logging systems; the simulation therefore tests the attribution logic that would apply to external divergences when they arise. We concur that the simulation cannot rule out new measurement artifacts in physical deployments. We will revise the abstract to separate the demonstrated internal consistency from the untested aspects of real-world measurement fidelity. revision: yes
Circularity Check
No circularity: conceptual framework with no equations, fitted parameters, or self-referential derivations
full rationale
The manuscript proposes a policy-neutral execution layer as a conceptual architecture for separating decision semantics from execution behavior in industrial dispatching. The central claim is that this layer makes deployment mismatches observable and attributable. Evaluation occurs entirely inside a discrete-event simulator, but the paper presents no mathematical derivations, predictions derived from fitted parameters, or first-principles results that reduce to their own inputs. No self-citations are invoked to justify uniqueness theorems or ansatzes. The load-bearing assumption (that a standardized execution contract can be realized without new errors in real environments) is stated but not derived from prior results within the paper; it remains an untested modeling choice rather than a circular reduction. This is a standard non-finding for a framework paper lacking quantitative self-referential structure.
Axiom & Free-Parameter Ledger
invented entities (1)
-
policy-neutral execution and measurement layer
no independent evidence
Reference graph
Works this paper leans on
-
[1]
A survey of dynamic scheduling in manufacturing systems,
D. Ouelhadj and S. Petrovic, “A survey of dynamic scheduling in manufacturing systems,”Journal of Scheduling, vol. 12, no. 4, pp. 417– 431, Aug. 2009, doi: 10.1007/s10951-008-0090-8
-
[2]
A literature review of reinforcement learn- ing methods applied to job-shop scheduling problems,
X. Zhang and G.-Y . Zhu, “A literature review of reinforcement learn- ing methods applied to job-shop scheduling problems,”Computers & Operations Research, vol. 175, Art. no. 106929, Mar. 2025, doi: 10.1016/j.cor.2024.106929
-
[3]
Graph neural networks for job shop scheduling problems: A survey,
I. G. Smitet al., “Graph neural networks for job shop scheduling problems: A survey,”Computers & Operations Research, vol. 176, Art. no. 106914, Apr. 2025, doi: 10.1016/j.cor.2024.106914
-
[4]
Offline reinforcement learning for learning to dispatch for job shop scheduling,
J. van Remmerden, Z. Bukhsh, and Y . Zhang, “Offline reinforcement learning for learning to dispatch for job shop scheduling,”Machine Learning, vol. 114, no. 8, Mar. 2025, doi: 10.1007/s10994-025-06826-w
-
[5]
Scalable Production Scheduling: Linear Complexity via Unified Homogeneous Graphs
J. Hoss, M. Link, and N. Klarmann, “Scalable production scheduling: Linear complexity via unified homogeneous graphs,”arXiv preprint arXiv:2604.23841, Apr. 2026, doi: 10.48550/arXiv.2604.23841
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2604.23841 2026
-
[6]
P. St ¨ockermannet al., “Reinforcement learning based dispatching solu- tions in semiconductor manufacturing: A literature review on validation and deployment,”Production & Manufacturing Research, vol. 13, no. 1, Art. no. 2582472, 2025, doi: 10.1080/21693277.2025.2582472
-
[7]
Challenges of real- world reinforcement learning,
G. Dulac-Arnold, D. Mankowitz, and T. Hester, “Challenges of real- world reinforcement learning,”Machine Learning, vol. 110, pp. 2419– 2468, Sep. 2021, doi: 10.1007/s10994-021-05961-4
-
[8]
Dynamic scheduling for flexible job shop with new job insertions by deep reinforcement learning,
S. Luo, “Dynamic scheduling for flexible job shop with new job insertions by deep reinforcement learning,”Applied Soft Computing, vol. 91, Art. no. 106208, Jun. 2020, doi: 10.1016/j.asoc.2020.106208
-
[9]
Designing an adaptive and deep learning based control framework for modular production systems,
M. Panzer and N. Gronau, “Designing an adaptive and deep learning based control framework for modular production systems,”Journal of Intelligent Manufacturing, vol. 35, no. 8, pp. 4113–4136, Dec. 2024, doi: 10.1007/s10845-023-02249-3
-
[10]
Action robust reinforcement learn- ing and applications in continuous control,
C. Tessler, Y . Efroni, and S. Mannor, “Action robust reinforcement learn- ing and applications in continuous control,” inInternational Conference on Machine Learning, 2019, pp. 6215–6224
2019
-
[11]
A production scheduling frame- work for reinforcement learning under real-world constraints,
J. Hoss, F. Schelling, and N. Klarmann, “A production scheduling frame- work for reinforcement learning under real-world constraints,” inProc. 2025 IEEE 21st Int. Conf. Automation Science and Engineering (CASE), 2025, pp. 1736–1743, doi: 10.1109/CASE58245.2025.11163982
-
[12]
https://doi.org/10.1109/SSCI47803.2020.9308468, https://doi.org/10.1109/SSCI47803.2020.9308468
W. Zhao, J. P. Queralta, and T. Westerlund, “Sim-to-real transfer in deep reinforcement learning for robotics: A survey,” inProc. 2020 IEEE Symposium Series on Computational Intelligence (SSCI), Dec. 2020, pp. 737–744, doi: 10.1109/SSCI47803.2020.9308468
-
[13]
DeepREM: Deep-learning- based radio environment map estimation from sparse measurements,
H. Xu, W. Yu, D. Griffith, and N. Golmie, “A survey on In- dustrial Internet of Things: A cyber-physical systems perspective,” IEEE Access, vol. 6, pp. 78238–78259, Dec. 2018, doi: 10.1109/AC- CESS.2018.2884906
work page doi:10.1109/ac- 2018
-
[14]
E. M. Martinez, P. Ponce, I. Macias, and A. Molina, “Automation pyramid as constructor for a complete digital twin, case study: A didactic manufacturing system,”Sensors, vol. 21, no. 14, Art. no. 4656, Jul. 2021, doi: 10.3390/s21144656
-
[15]
Digital twins in Industry 5.0,
Z. Lv, “Digital twins in Industry 5.0,”Research, vol. 6, Art. no. 0071, Mar. 2023, doi: 10.34133/research.0071
-
[16]
Edge computing in Industrial Internet of Things: Architecture, advances and challenges,
T. Qiu, N. Chen, K. Li, D. Qiao, Z. Fu, and W. Si, “Edge computing in Industrial Internet of Things: Architecture, advances and challenges,” IEEE Communications Surveys & Tutorials, vol. 22, no. 4, pp. 2462– 2488, Jul. 2020, doi: 10.1109/COMST.2020.3009103
-
[17]
C. Destouet, H. Tlahig, B. Bettayeb, and B. Mazari, “Flexible job shop scheduling problem under Industry 5.0: A survey on human reintegration, environmental consideration and resilience improvement,” Journal of Manufacturing Systems, vol. 67, pp. 155–173, Apr. 2023, doi: 10.1016/j.jmsy.2023.01.004
-
[18]
Scherfke and O
S. Scherfke and O. V olkmer,SimPy: Discrete Event Simulation for Python, version 4.1.1, [Online]. Available: https://simpy.readthedocs.io/
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.