HADT: A Heterogeneous Multi-Agent Differential Transformer for Autonomous Earth Observation Satellite Cluster
Pith reviewed 2026-06-28 22:39 UTC · model grok-4.3
The pith
A differential transformer enables satellite clusters to manage resources autonomously by treating scheduling as model-free reinforcement learning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
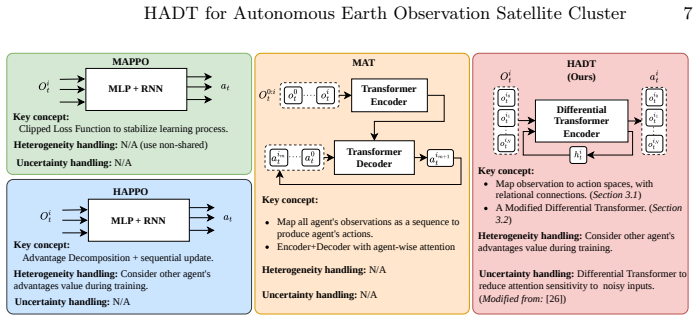
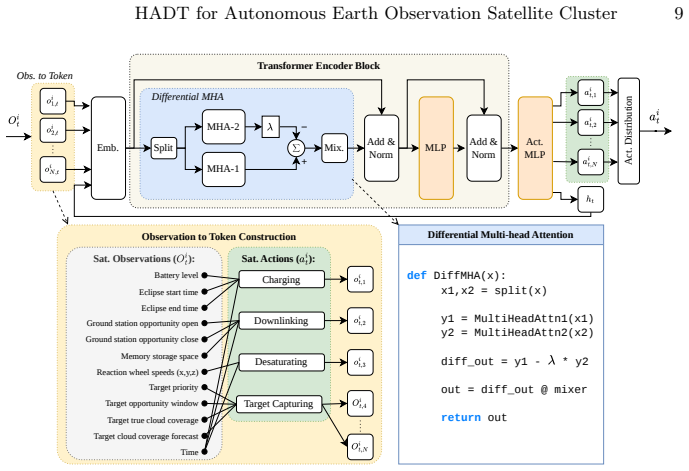
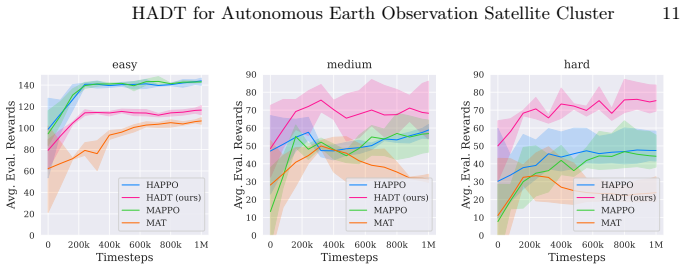
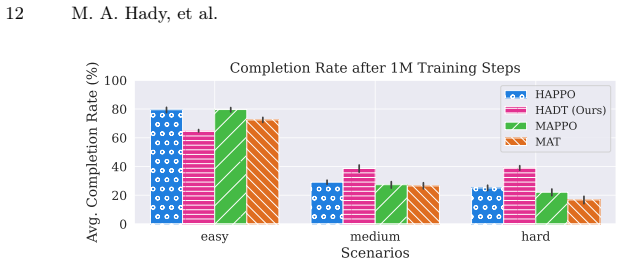
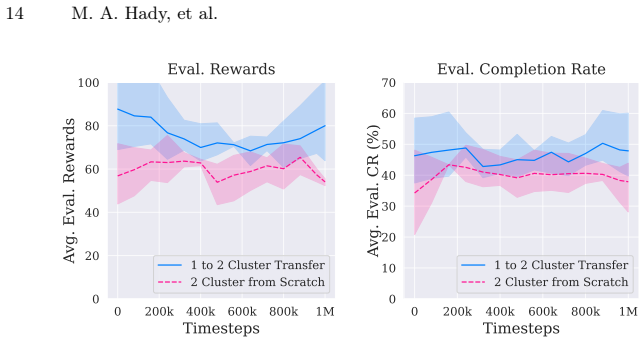
The authors claim that the Heterogeneous Multi-Agent Differential Transformer (HADT), equipped with relational observations-actions tokenization and a differential attention mechanism, produces superior autonomous resource management for heterogeneous Earth observation satellite clusters. Experimental results show significant performance gains over baselines along with strong adaptability and transferability across different numbers of satellites in the cluster.
What carries the argument
The HADT architecture, which tokenizes relational observations and actions from heterogeneous agents and applies differential attention within a multi-agent reinforcement learning setup for satellite scheduling.
If this is right
- Significant performance improvements over available baselines in autonomous Earth observation mission resource management.
- Strong adaptability and transferability when the number of satellites in the cluster varies.
- Real-time decision-making with minimal interaction with ground operators.
- Effective coordination of heterogeneous satellites including both optical and SAR types.
Where Pith is reading between the lines
- The differential attention component may transfer to other multi-agent reinforcement learning settings that involve mixed sensor types or uncertain dynamics.
- The approach could reduce dependence on high-fidelity physical simulations when planning operations for other autonomous systems such as drone fleets or robotic teams.
- Explicit tests introducing specific orbital uncertainties such as drag variations or communication delays would clarify the limits of transferability.
Load-bearing premise
Reformulating satellite resource management as a model-free sequential decision process will produce adaptive real-time policies that remain effective when the underlying dynamics are unavailable, overly complex, or inaccurate due to space environment uncertainties.
What would settle it
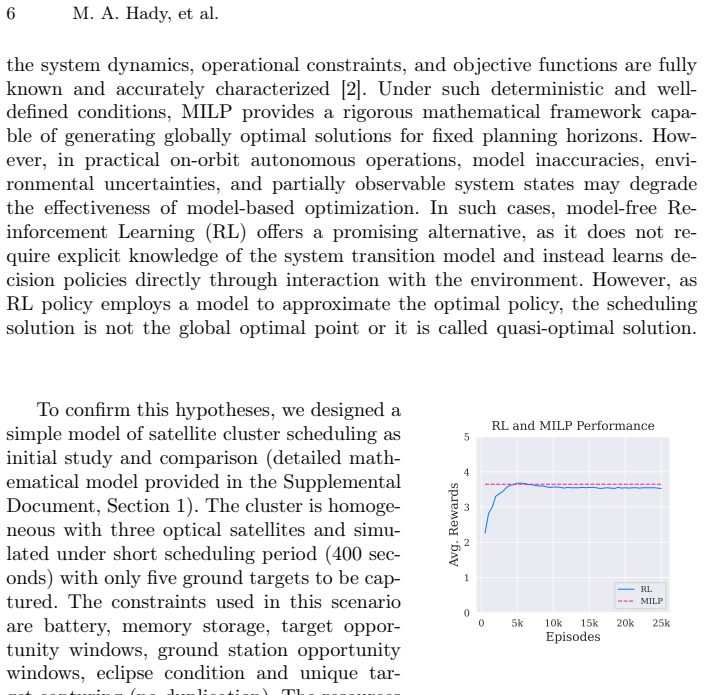
A controlled test in which an accurate model of satellite dynamics is provided and HADT is compared directly against a traditional optimization solver to determine whether the model-free approach still yields performance gains or falls behind.
Figures
read the original abstract
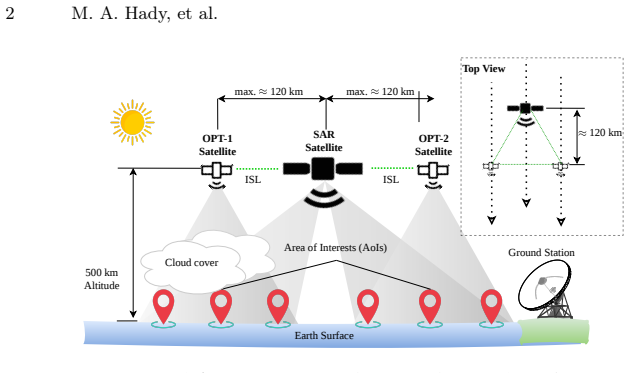
This work addresses the problem of autonomous resource management in heterogeneous satellite cluster conducting Earth Observation (EO) missions including optical and Synthetic Aperture Radar (SAR) satellites. In autonomous operation mode, satellites are equipped with intelligent capabilities enabling real-time decision-making based on the latest conditions, while requiring minimal interaction with ground operators. Traditional scheduling approaches typically rely on mathematical models to represent satellite mission and resource management. Then, this problem is solved by using optimization algorithms. However, such solutions become less effective when the underlying models are not available, over complex, and inaccurate due to dynamic changes and uncertainties inherent in the space mission environment. A promising alternative is to reformulate the problem as a sequential decision-making process and apply model-free reinforcement learning techniques to enable adaptive and real-time resource management. To this end, we propose a novel transformer-based architecture tailored for heterogeneous satellite cluster autonomous EO Mission with relational observations-actions tokenization and differential attention mechanism. Our experimental results demonstrate significant performance improvements compared to the available baselines. Moreover, the proposed architecture exhibits strong adaptability and transferability with respect to varying numbers of satellite clusters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes HADT, a heterogeneous multi-agent differential transformer for autonomous resource management in Earth Observation satellite clusters. It reformulates satellite scheduling as a model-free sequential decision process solved via reinforcement learning, introducing relational observations-actions tokenization and a differential attention mechanism to handle agent heterogeneity. The authors claim significant performance gains over baselines and strong adaptability/transferability to varying numbers of satellites in the cluster.
Significance. If the performance and transferability results hold under rigorous evaluation, the work would advance multi-agent RL applications to uncertain, high-stakes domains such as space systems by demonstrating scalable handling of heterogeneous agents without explicit dynamics models. The differential attention component could generalize beyond satellites if shown to support variable cardinalities natively.
major comments (1)
- [Abstract] Abstract: the central claim that the architecture 'exhibits strong adaptability and transferability with respect to varying numbers of satellite clusters' is load-bearing for the contribution, yet the abstract provides no indication of the scaling mechanism (e.g., set-based processing, explicit masking, or padding). If the relational tokenization or differential attention uses fixed-dimensional inputs or positional encodings tied to a maximum cluster size, transfer to unseen cardinalities would require retraining or architectural modification, directly undermining the transferability result.
minor comments (1)
- [Abstract] The abstract would benefit from a one-sentence description of the underlying RL algorithm (e.g., actor-critic variant) and the observation/action spaces to allow readers to assess the tokenization claim immediately.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. We address the single major comment below and have made revisions to strengthen the description of the architecture's scaling properties.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the architecture 'exhibits strong adaptability and transferability with respect to varying numbers of satellite clusters' is load-bearing for the contribution, yet the abstract provides no indication of the scaling mechanism (e.g., set-based processing, explicit masking, or padding). If the relational tokenization or differential attention uses fixed-dimensional inputs or positional encodings tied to a maximum cluster size, transfer to unseen cardinalities would require retraining or architectural modification, directly undermining the transferability result.
Authors: We agree that the abstract should explicitly indicate the scaling mechanism supporting the transferability claim. The full manuscript (Section 3.2 and 3.3) describes that relational observations-actions tokenization encodes inputs as unordered sets of variable cardinality, while the differential attention mechanism computes attention weights over these sets without fixed-dimensional embeddings or positional encodings anchored to a maximum cluster size. This design permits native handling of different numbers of agents via set aggregation and attention, enabling zero-shot transfer to unseen cardinalities. We have revised the abstract to include a concise clause noting the set-based relational tokenization and differential attention for variable cluster sizes. We also added a brief clarification sentence in the abstract and will expand the related-work discussion of set transformers in the revision. revision: yes
Circularity Check
No circularity: architecture proposal and experimental claims are independent of self-referential reductions.
full rationale
The paper proposes a novel transformer architecture (HADT) with relational tokenization and differential attention for multi-agent satellite scheduling, then reports experimental improvements and transferability to varying cluster sizes. No equations, fitted parameters, or self-citations are presented in the abstract or described claims that reduce any result to its own inputs by construction. The central claims rest on empirical evaluation against baselines rather than a derivation chain that collapses to definitions or prior self-work. This is the standard non-circular case for an applied ML architecture paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Agile earth observation satellite scheduling over 20 years: Formulations, methods, and future directions,
X. Wang, G. Wu, L. Xing, and W. Pedrycz, “Agile earth observation satellite scheduling over 20 years: Formulations, methods, and future directions,” IEEE Systems Journal, vol. 15, no. 3, pp. 3881–3892, 2020
2020
-
[2]
A mixed integer linear program- ming model for multi-satellite scheduling,
X. Chen, G. Reinelt, G. Dai, and A. Spitz, “A mixed integer linear program- ming model for multi-satellite scheduling,”European Journal of Operational Research, vol. 275, no. 2, pp. 694–707, 2019
2019
-
[3]
Optimal target sequencing in the agile earth-observing satellite scheduling problem using learned dynamics,
M. Stephenson and H. Schaub, “Optimal target sequencing in the agile earth-observing satellite scheduling problem using learned dynamics,” in The AAS/AIAA Astrodynamics Specialist Conference, Big Sky, MT, USA, pp. 13–17, 2023
2023
-
[4]
Dense points aggregation for efficient and collaborative earth-imaging task planning,
Y. Pan, P. Wang, X. Hui, and J. Li, “Dense points aggregation for efficient and collaborative earth-imaging task planning,” inProceedings of the 2022 5th ACAI, ACAI ’22, (New York, NY, USA), Association for Computing Machinery, 2023
2022
-
[5]
Mission planning for distributed multiple agile earth observing satellites by attention-based deep reinforce- ment learning method,
P. Li, H. Wang, Y. Zhang, and R. Pan, “Mission planning for distributed multiple agile earth observing satellites by attention-based deep reinforce- ment learning method,”Advances in Space Research, 2024
2024
-
[6]
Objective task matching strategy for multi-satellite imaging mission planning in complex heterogeneous scenar- ios,
X. Yang, M. Hu, and G. Huang, “Objective task matching strategy for multi-satellite imaging mission planning in complex heterogeneous scenar- ios,” MICML ’23, (New York, NY, USA), p. 96–101, ACM, 2024
2024
-
[7]
Applying autonomy to dis- tributed satellite systems: Trends, challenges, and future prospects,
C. Araguz, E. Bou-Balust, and E. Alarcón, “Applying autonomy to dis- tributed satellite systems: Trends, challenges, and future prospects,”Sys- tems Engineering, vol. 21, no. 5, pp. 401–416, 2018
2018
-
[8]
Task allocation strategies for cooperative task planning of multi-autonomous satellite constellation,
F. Yao, J. Li, Y. Chen, X. Chu, and B. Zhao, “Task allocation strategies for cooperative task planning of multi-autonomous satellite constellation,” Advances in space research, vol. 63, no. 2, pp. 1073–1084, 2019
2019
-
[9]
Novasar-s low cost spaceborne sar payload design, development and deployment of a new benchmark in spaceborne radar,
M. Cohen, A. Larkins, P. L. Semedo, and G. Burbidge, “Novasar-s low cost spaceborne sar payload design, development and deployment of a new benchmark in spaceborne radar,” in2017 IEEE Radar Conference (Radar- Conf), pp. 0903–0907, IEEE, 2017
2017
-
[10]
Optisar-net: A cross-domain ship detec- tion method for multi-source remote sensing data,
J. Dong, J. Feng, and X. Tang, “Optisar-net: A cross-domain ship detec- tion method for multi-source remote sensing data,”IEEE Transactions on Geoscience and Remote Sensing, 2024
2024
-
[11]
Spacecraft formation flying orbital control for earth observation mission,
A. Alzubairi, A. Tameem, and B. Kada, “Spacecraft formation flying orbital control for earth observation mission,”Scientific African, vol. 26, p. e02391, 2024
2024
-
[12]
Optimal surveillance schedul- ing for multiple sar-eo satellite train constellation,
S. J. Kim, M. Kim, C.-H. Kim, and H. Choi, “Optimal surveillance schedul- ing for multiple sar-eo satellite train constellation,” inAIAA AVIATION FORUM AND ASCEND 2024, p. 4851, 2024
2024
-
[13]
Single-agent reinforce- ment learning for scalable earth-observing satellite constellation opera- tions,
A. Herrmann, M. A. Stephenson, and H. Schaub, “Single-agent reinforce- ment learning for scalable earth-observing satellite constellation opera- tions,”Journal of Spacecraft and Rockets, vol. 61, no. 1, pp. 114–132, 2024. HADT for Autonomous Earth Observation Satellite Cluster 17
2024
-
[14]
Bsk-rl: Modular, high-fidelity reinforce- ment learning environments for spacecraft tasking,
M. A. Stephenson and H. Schaub, “Bsk-rl: Modular, high-fidelity reinforce- ment learning environments for spacecraft tasking,” in75th International Astronautical Congress, Milan, Italy, IAF, 2024
2024
-
[15]
Adynamicandcollaborative spectrum sharing strategy based on multi-agent drl in satellite-terrestrial converged networks,
C.Tang,Y.Chen,G.Chen,L.Du,andH.Liu,“Adynamicandcollaborative spectrum sharing strategy based on multi-agent drl in satellite-terrestrial converged networks,”IEEE Transactions on Vehicular Technology, 2024
2024
-
[16]
Reinforcement learning for multi-satellite agile earth observing scheduling under various communica- tion assumptions,
A. Herrmann, M. Stephenson, and H. Schaub, “Reinforcement learning for multi-satellite agile earth observing scheduling under various communica- tion assumptions,” inAAS Rocky Mountain GN&C Conference, 2023
2023
-
[17]
Reinforcement learning for earth-observing satelliteautonomywithevent-basedtaskintervals,
M. Stephenson and H. Schaub, “Reinforcement learning for earth-observing satelliteautonomywithevent-basedtaskintervals,” inAAS Rocky Mountain GN&C Conference, Breckenridge, CO, 2024
2024
-
[18]
A survey on multi-agent reinforcement learning and its application,
Z. Ning and L. Xie, “A survey on multi-agent reinforcement learning and its application,”Journal of Automation and Intelligence, 2024
2024
-
[19]
Multi-agent reinforcement learning for resources allocation optimization: a survey,
M. A. Hady, S. Hu, M. Pratama, Z. Cao, and R. Kowalczyk, “Multi-agent reinforcement learning for resources allocation optimization: a survey,”Ar- tificial Intelligence Review, vol. 58, no. 11, p. 354, 2025
2025
-
[20]
The surprising effectiveness of ppo in cooperative multi-agent games,
C. Yu, A. Velu, E. Vinitsky, J. Gao, Y. Wang, A. Bayen, and Y. Wu, “The surprising effectiveness of ppo in cooperative multi-agent games,”Advances in Neur-IPS, vol. 35, pp. 24611–24624, 2022
2022
-
[21]
Heterogeneous- agent reinforcement learning,
Y. Zhong, J. G. Kuba, X. Feng, S. Hu, J. Ji, and Y. Yang, “Heterogeneous- agent reinforcement learning,”JMLR, vol. 25, pp. 1–67, 2024
2024
-
[22]
Using en- hanced simulation environments to accelerate reinforcement learning for long-durationsatelliteautonomy,
M. Stephenson, L. Mantovani, S. Phillips, and H. Schaub, “Using en- hanced simulation environments to accelerate reinforcement learning for long-durationsatelliteautonomy,” inAIAA SCITECH 2024 Forum,p.0990, 2024
2024
-
[23]
Proximal Policy Optimization Algorithms
a. Schulman, et., “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[24]
Multi- agent reinforcement learning is a sequence modeling problem,
M. Wen, J. Kuba, R. Lin, W. Zhang, Y. Wen, J. Wang, and Y. Yang, “Multi- agent reinforcement learning is a sequence modeling problem,”Advances in Neural Information Processing Systems, vol. 35, pp. 16509–16521, 2022
2022
-
[25]
Updet: Universal multi-agent rein- forcement learning via policy decoupling with transformers,
S. Hu, F. Zhu, X. Chang, and X. Liang, “Updet: Universal multi-agent rein- forcement learning via policy decoupling with transformers,”arXiv preprint arXiv:2101.08001, 2021
-
[26]
Differential transformer.arXiv preprint arXiv:2410.05258, 2024
T. Ye, L. Dong, Y. Xia, Y. Sun, Y. Zhu, G. Huang, and F. Wei, “Differential transformer,”arXiv preprint arXiv:2410.05258, 2024
-
[27]
Attention is all you need,
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention is all you need,”Advances in neural information processing systems, vol. 30, 2017
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.