Surface Constraint Policy for Learning Surface-Constrained and Dynamically Feasible Robot Skills
Pith reviewed 2026-06-28 21:51 UTC · model grok-4.3
The pith
Surface constraint policy encodes free-form surface geometry via Gaussian kernel to generate dynamically feasible robot actions from demonstrations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
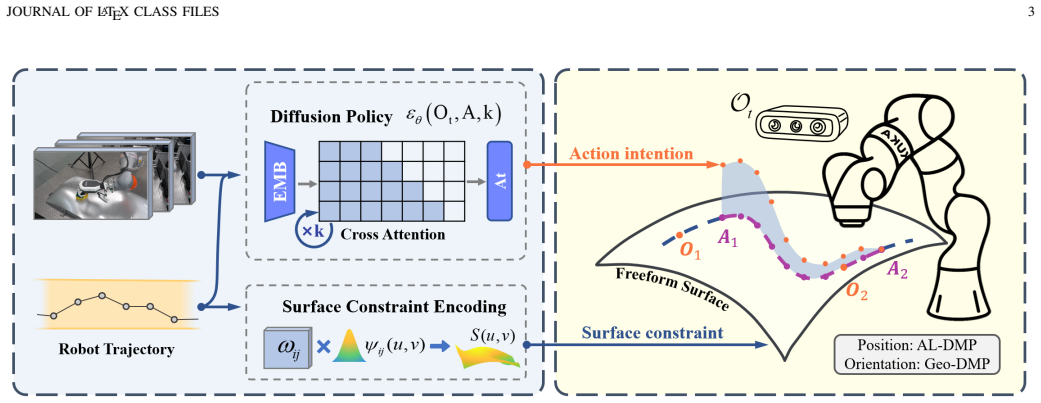
The surface constraint policy encodes surface geometry constraints with a two-dimensional weighted Gaussian kernel function derived from demonstrations, infers task-level action intentions from multimodal sensory inputs via a diffusion-based policy, and transforms those intentions into surface-constrained dynamic movement primitives through similarity-based action mapping, thereby generating structured surface geometric intent and dynamically admissible actions.
What carries the argument
The two-dimensional weighted Gaussian kernel function that encodes surface geometry constraints from demonstrations and supplies the constraint representation for subsequent diffusion inference and DMP mapping.
If this is right
- Robot actions achieve reliable alignment with arbitrary free-form surfaces while satisfying dynamic feasibility.
- Contact stability is maintained throughout execution of surface-constrained tasks.
- Task success rates exceed those of existing diffusion-based methods on the same surface manipulation problems.
- The approach applies across multiple distinct surface manipulation tasks without task-specific redesign.
Where Pith is reading between the lines
- The Gaussian-kernel encoding could be replaced by other low-dimensional surface representations if the kernel assumption fails on highly irregular geometries.
- Because the kernel is fit from demonstrations, performance may degrade when demonstration coverage is sparse on parts of the surface.
- Real-time visual feedback combined with the kernel could allow online adaptation when the target surface changes shape during execution.
Load-bearing premise
The surface geometry constraint can be sufficiently encoded by a two-dimensional weighted Gaussian kernel function derived from demonstrations, and that this encoding plus diffusion inference will reliably produce dynamically feasible actions that maintain stable contact.
What would settle it
On a surface manipulation benchmark, if SCP-generated trajectories produce lower success rates or lose stable contact more often than baseline diffusion policies, the claim of reliable surface alignment and dynamic feasibility would be falsified.
Figures
read the original abstract
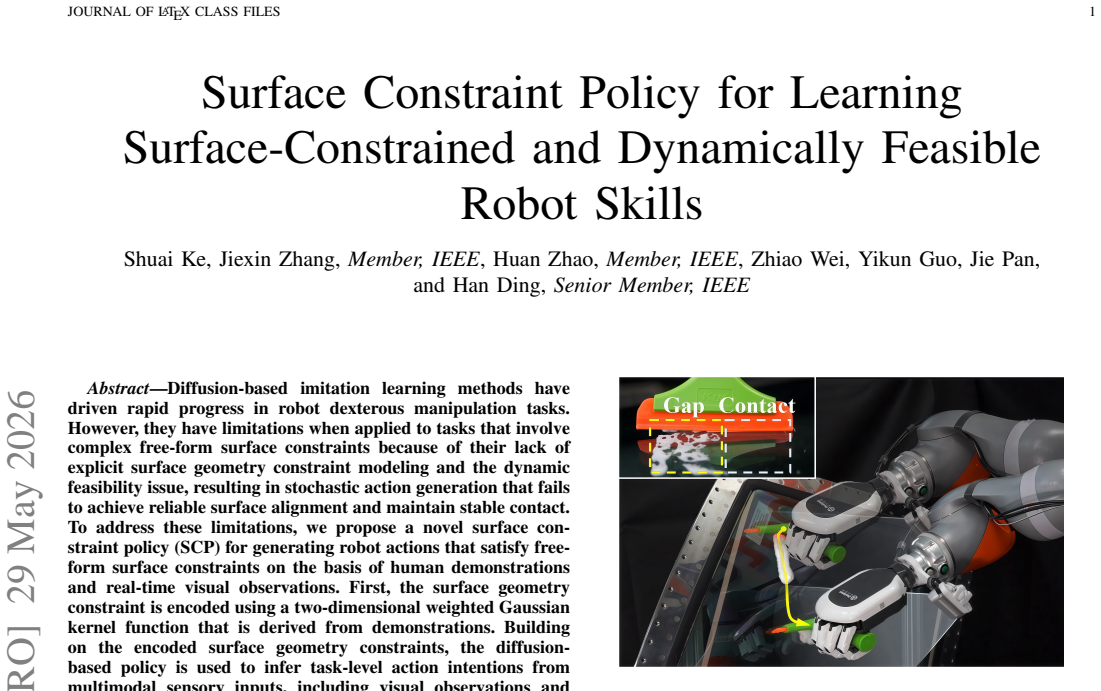
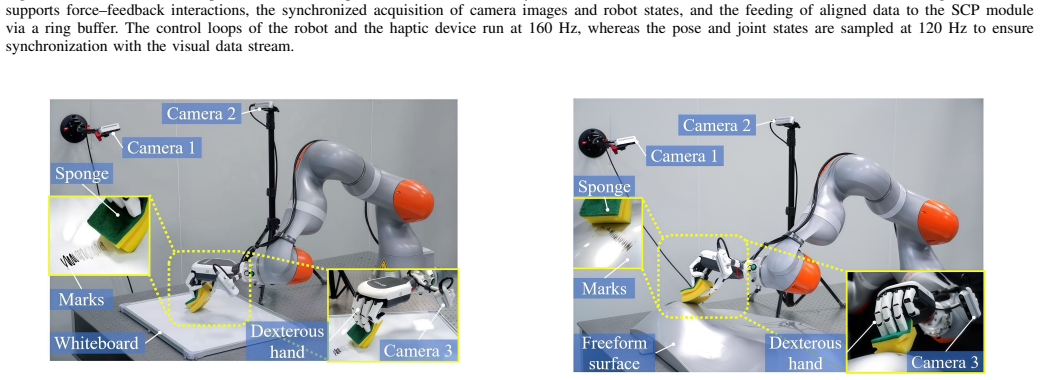
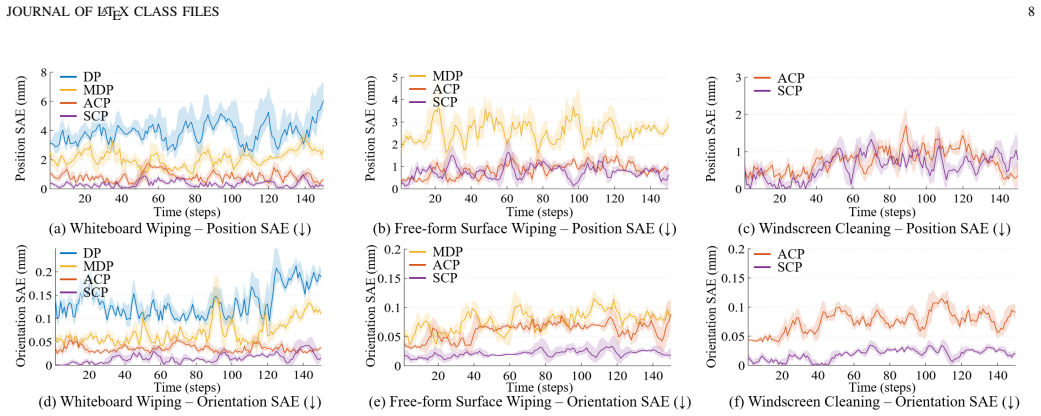
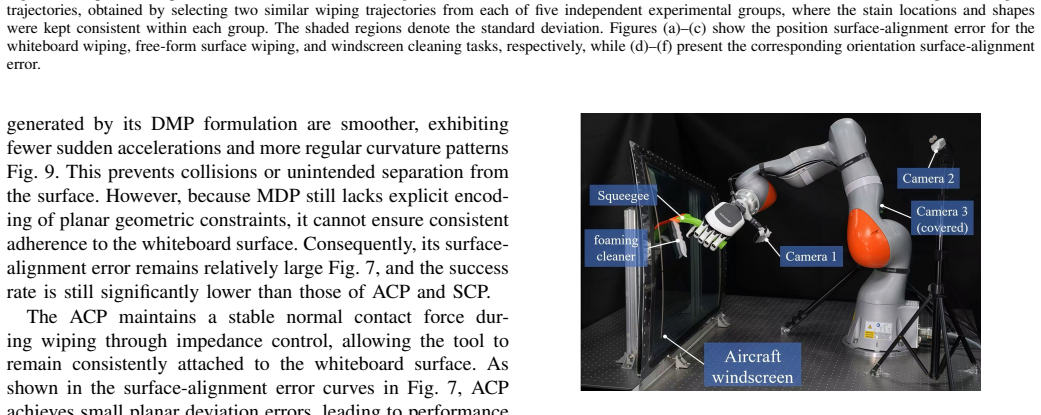
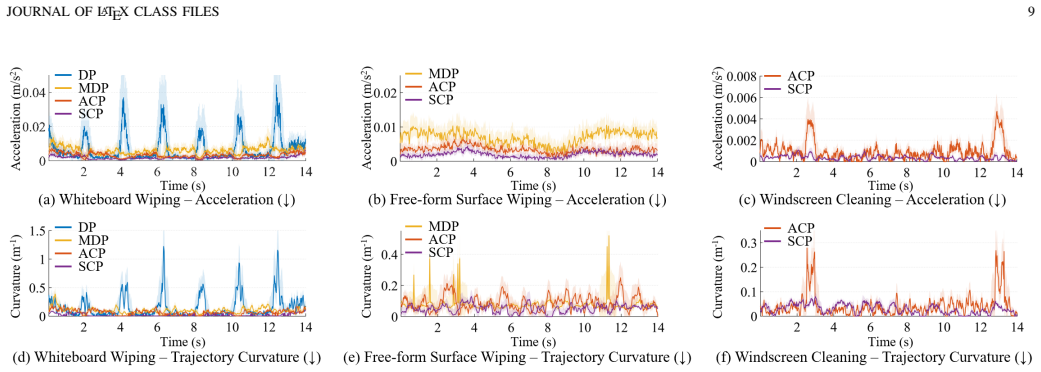
Diffusion-based imitation learning methods have driven rapid progress in robot dexterous manipulation tasks. However, they have limitations when applied to tasks that involve complex free-form surface constraints because of their lack of explicit surface geometry constraint modeling and the dynamic feasibility issue, resulting in stochastic action generation that fails to achieve reliable surface alignment and maintain stable contact. To address these limitations, we propose a novel surface constraint policy (SCP) for generating robot actions that satisfy free-form surface constraints on the basis of human demonstrations and real-time visual observations. First, the surface geometry constraint is encoded using a two-dimensional weighted Gaussian kernel function that is derived from demonstrations. Building on the encoded surface geometry constraints, the diffusion-based policy is used to infer task-level action intentions from multimodal sensory inputs, including visual observations and robot state feedback. These intentions are further transformed into surface-constrained dynamic movement primitives (DMPs) through a similarity-based action mapping method, thereby enabling smooth and compliant motion execution. The SCP achieves generation of structured surface geometric intent and dynamically admissible actions. The proposed method is validated on multiple surface manipulation tasks and compared with existing techniques. The experimental results demonstrate superior task success rates and contact stability under surface constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the Surface Constraint Policy (SCP) for learning surface-constrained and dynamically feasible robot skills. It encodes surface geometry constraints using a two-dimensional weighted Gaussian kernel function derived from demonstrations. A diffusion-based policy infers task-level action intentions from multimodal sensory inputs, which are then mapped to surface-constrained dynamic movement primitives (DMPs) using a similarity-based method. The method is validated on multiple surface manipulation tasks, claiming superior task success rates and contact stability under surface constraints compared to existing techniques.
Significance. If the results hold with rigorous quantitative support, this work could contribute to imitation learning for contact-rich robotics tasks by providing an explicit mechanism for free-form surface constraints and dynamic feasibility. The pipeline logically connects kernel-based encoding, diffusion inference, and DMP mapping, which addresses stated limitations in current diffusion methods.
major comments (2)
- Abstract: The abstract asserts experimental superiority in task success rates and contact stability but supplies no quantitative details, baselines, error bars, or exclusion criteria, so the data cannot be assessed for support of the central claim.
- Method (surface geometry constraint encoding and similarity mapping): The Gaussian kernel parameters and similarity mapping are derived from the same demonstrations used to train the policy; without full clarification on separation or cross-validation, it is unclear whether any quantity reduces to a fitted value by construction.
minor comments (2)
- Abstract: Consider adding a brief statement on the number of tasks, evaluation metrics, or comparison methods to strengthen the summary of results.
- Notation and figures: Ensure the weighted Gaussian kernel definition and its parameters are consistently notated and visualized across sections describing the encoding step.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comments point by point below, indicating revisions where appropriate.
read point-by-point responses
-
Referee: Abstract: The abstract asserts experimental superiority in task success rates and contact stability but supplies no quantitative details, baselines, error bars, or exclusion criteria, so the data cannot be assessed for support of the central claim.
Authors: We agree that the abstract would benefit from quantitative support. In the revised manuscript we will expand the abstract to report key success rates (with standard deviations), the specific baselines compared, and the main experimental conditions and exclusion criteria. revision: yes
-
Referee: Method (surface geometry constraint encoding and similarity mapping): The Gaussian kernel parameters and similarity mapping are derived from the same demonstrations used to train the policy; without full clarification on separation or cross-validation, it is unclear whether any quantity reduces to a fitted value by construction.
Authors: The two-dimensional weighted Gaussian kernel is computed once from the demonstration trajectories solely to encode the fixed surface geometry; it is not updated during policy training. The diffusion policy learns to map multimodal observations to task-level intentions, after which the similarity-based mapping projects those intentions onto the pre-computed kernel. To eliminate ambiguity we will add an explicit paragraph in Section 3 clarifying this separation, the exact computation of kernel parameters, and any cross-validation or held-out splits used for policy training. revision: yes
Circularity Check
No significant circularity detected
full rationale
The provided abstract and description outline a standard imitation learning pipeline: encoding surface geometry via a 2D weighted Gaussian kernel from demonstrations, using diffusion to infer actions from multimodal inputs, and mapping to constrained DMPs via similarity. No equations, self-citations, or steps are shown that reduce any claimed prediction or result to its inputs by construction. The method is presented as empirically validated on tasks with external benchmarks, keeping the derivation self-contained and non-circular.
Axiom & Free-Parameter Ledger
free parameters (2)
- Gaussian kernel weights and bandwidths
- Similarity mapping thresholds
axioms (2)
- domain assumption Demonstrations sufficiently cover the free-form surface constraints for kernel encoding.
- domain assumption Diffusion model outputs can be mapped to dynamically admissible DMPs without violating feasibility.
Reference graph
Works this paper leans on
-
[1]
Dynamic motion primitives-based trajectory learning for physical human–robot interaction force control[J]
Xing X, Maqsood K, Zeng C, et al. Dynamic motion primitives-based trajectory learning for physical human–robot interaction force control[J]. IEEE Transactions on Industrial Informatics, 2023, 20(2): 1675-1686
2023
-
[2]
Behavior cloning-based robot active object detection with automatically generated data and revision method[J]
Liu S, Tian G, Shao X, et al. Behavior cloning-based robot active object detection with automatically generated data and revision method[J]. IEEE Transactions on Robotics, 2022, 39(1): 665-680
2022
-
[3]
Efficient insertion control for precision assembly based on demonstration learning and reinforcement learning[J]
Ma Y , Xu D, Qin F. Efficient insertion control for precision assembly based on demonstration learning and reinforcement learning[J]. IEEE Transactions on Industrial Informatics, 2020, 17(7): 4492-4502
2020
-
[4]
Unsupervised human activity recogni- tion learning for disassembly tasks[J]
Zhang X, Yi D, Behdad S, et al. Unsupervised human activity recogni- tion learning for disassembly tasks[J]. IEEE Transactions on Industrial Informatics, 2023, 20(1): 785-794
2023
-
[5]
A survey of inverse reinforcement learning[J]
Adams S, Cody T, Beling P A. A survey of inverse reinforcement learning[J]. Artificial Intelligence Review, 2022, 55(6): 4307-4346
2022
-
[6]
Learning variable impedance control via inverse reinforcement learning for force-related tasks[J]
Zhang X, Sun L, Kuang Z, et al. Learning variable impedance control via inverse reinforcement learning for force-related tasks[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 2225-2232
2021
-
[7]
Deep generative models in robotics: A survey on learning from multimodal demonstrations[J]
Urain J, Mandlekar A, Du Y , et al. Deep generative models in robotics: A survey on learning from multimodal demonstrations[J]. arXiv preprint arXiv:2408.04380, 2024
-
[8]
Learning multimodal behaviors from scratch with diffusion policy gradient[J]
Li S, Krohn R, Chen T, et al. Learning multimodal behaviors from scratch with diffusion policy gradient[J]. Advances in Neural Information Processing Systems, 2024, 37: 38456-38479
2024
-
[9]
On the Passive Virtual Viscous Element Injection Method for Elastic Joint Robots[J]
Zhang J, Hou T, Ding Y , et al. On the Passive Virtual Viscous Element Injection Method for Elastic Joint Robots[J]. IEEE Transactions on Robotics, 2025
2025
-
[10]
Generative adversarial network: An overview of theory and applications[J]
Aggarwal A, Mittal M, Battineni G. Generative adversarial network: An overview of theory and applications[J]. International Journal of Information Management Data Insights, 2021, 1(1): 100004
2021
-
[11]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
Zhao T Z, Kumar V , Levine S, et al. Learning fine-grained bimanual ma- nipulation with low-cost hardware[J]. arXiv preprint arXiv:2304.13705, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[12]
Diffusion policy: Visuomotor policy learning via action diffusion[J]
Chi C, Xu Z, Feng S, et al. Diffusion policy: Visuomotor policy learning via action diffusion[J]. The International Journal of Robotics Research, 2023: 02783649241273668
2023
-
[13]
Learning diffusion policies from demonstrations for compliant contact-rich manipulation[J]
Aburub M, Beltran-Hernandez C C, Kamijo T, et al. Learning diffusion policies from demonstrations for compliant contact-rich manipulation[J]. arXiv preprint arXiv:2410.19235, 2024
-
[14]
PoseDiffusion: A coarse-to-fine frame- work for unseen object 6-DoF pose estimation[J]
Zhou J, Zhu Q, Wang Y , et al. PoseDiffusion: A coarse-to-fine frame- work for unseen object 6-DoF pose estimation[J]. IEEE Transactions on Industrial Informatics, 2024, 20(9): 11127-11138
2024
-
[15]
Movement primitive diffusion: Learning gentle robotic manipulation of deformable objects[J]
Scheikl P M, Schreiber N, Haas C, et al. Movement primitive diffusion: Learning gentle robotic manipulation of deformable objects[J]. IEEE Robotics and Automation Letters, 2024
2024
-
[16]
RDT-1B: a Diffusion Foundation Model for Bimanual Manipulation
Liu S, Wu L, Li B, et al. Rdt-1b: a diffusion foundation model for bimanual manipulation[J]. arXiv preprint arXiv:2410.07864, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[17]
3D Diffusion Policy: Generalizable Visuomotor Policy Learning via Simple 3D Representations
Ze Y , Zhang G, Zhang K, et al. 3d diffusion policy[J]. arXiv e-prints, 2024: arXiv:2403.03954
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[18]
Human Robot Pouring Skill Transfer in Material Synthesis Using Vision-Based DMPs[J]
Yu X, Liu H, He W, et al. Human Robot Pouring Skill Transfer in Material Synthesis Using Vision-Based DMPs[J]. IEEE Transactions on Industrial Informatics, 2025
2025
-
[19]
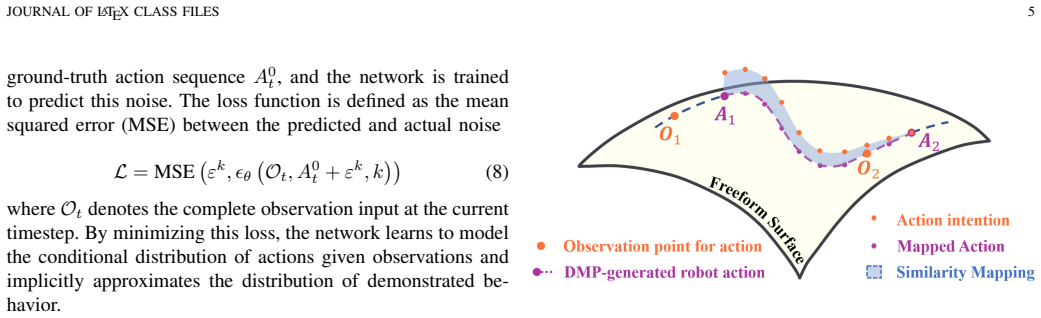
Liu Y , Kang D, Ha S. Learning a High-quality Robotic Wiping Policy Using Systematic Reward Analysis and Visual-Language Model Based Curriculum[J]. arXiv preprint arXiv:2502.12599, 2025
-
[20]
Wang Y , Chen C, Hong Y , et al. PI2-BDMPs in Combination With Con- tact Force Model: A Robotic Polishing Skill Learning and Generalization Approach[J]. IEEE/ASME Transactions on Mechatronics, 2025, 30(2): 978-988. DOI:10.1109/TMECH.2025.3547829
-
[21]
An overview of systems and techniques for autonomous robotic ultrasound acquisitions[J]
Li K, Xu Y , Meng M Q H. An overview of systems and techniques for autonomous robotic ultrasound acquisitions[J]. IEEE Transactions on Medical Robotics and Bionics, 2021, 3(2): 510-524
2021
-
[22]
Robotic arm based automatic ultrasound scan- ning for three-dimensional imaging[J]
Huang Q, Lan J, Li X. Robotic arm based automatic ultrasound scan- ning for three-dimensional imaging[J]. IEEE Transactions on Industrial Informatics, 2018, 15(2): 1173-1182
2018
-
[23]
Skill learning and action recognition by arc-length dynamic movement primitives[J]
Ga ˇspar T, Nemec B, Morimoto J, et al. Skill learning and action recognition by arc-length dynamic movement primitives[J]. Robotics and autonomous systems, 2018, 100: 225-235
2018
-
[24]
Phase-independent Dynamic Move- ment Primitives with applications to human-robot co-manipulation and time optimal planning[J]
Braglia G, Tebaldi D, Biagiotti L. Phase-independent Dynamic Move- ment Primitives with applications to human-robot co-manipulation and time optimal planning[J]. Robotics and Autonomous Systems, 2025: 105120
2025
-
[25]
Robotic Grinding Skills Learning Based on Geodesic Length Dynamic Motion Primitives[J]
Ke S, Zhao H, Li X, et al. Robotic Grinding Skills Learning Based on Geodesic Length Dynamic Motion Primitives[J]. arXiv preprint arXiv:2504.17216, 2025
-
[26]
Synthesizing diverse and physically stable grasps with arbitrary hand structures using differentiable force closure estimator[J]
Liu T, Liu Z, Jiao Z, et al. Synthesizing diverse and physically stable grasps with arbitrary hand structures using differentiable force closure estimator[J]. IEEE Robotics and Automation Letters, 2021, 7(1): 470- 477
2021
-
[27]
Physics-informed diffusion models[J]
Bastek J H, Sun W C, Kochmann D M. Physics-informed diffusion models[J]. arXiv preprint arXiv:2403.14404, 2024
-
[28]
Aligning optimization trajectories with diffusion models for constrained design generation[J]
Giannone G, Srivastava A, Winther O, et al. Aligning optimization trajectories with diffusion models for constrained design generation[J]. Advances in Neural Information Processing Systems, 2023, 36: 51830- 51861. JOURNAL OF LATEX CLASS FILES 11
2023
-
[29]
Constrained synthesis with pro- jected diffusion models[J]
Christopher J K, Baek S, Fioretto N. Constrained synthesis with pro- jected diffusion models[J]. Advances in Neural Information Processing Systems, 2024, 37: 89307-89333
2024
-
[30]
Universal Manipulation Interface: In-The-Wild Robot Teaching Without In-The-Wild Robots
Chi C, Xu Z, Pan C, et al. Universal manipulation interface: In- the-wild robot teaching without in-the-wild robots[J]. arXiv preprint arXiv:2402.10329, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[31]
Adaptive Compliance Policy: Learning Approximate Compliance for Diffusion Guided Control[J]
Hou Y , Liu Z, Chi C, et al. Adaptive Compliance Policy: Learning Approximate Compliance for Diffusion Guided Control[J]. arXiv preprint arXiv:2410.09309, 2024
-
[32]
DDAT: Diffusion Policies Enforcing Dynamically Admissible Robot Trajectories[J]
Bouvier J B, Ryu K, Nagpal K, et al. DDAT: Diffusion Policies Enforcing Dynamically Admissible Robot Trajectories[J]. arXiv preprint arXiv:2502.15043, 2025
-
[33]
Shi X, Jin J. FRMD: Fast Robot Motion Diffusion with Consistency- Distilled Movement Primitives for Smooth Action Generation[J]. arXiv preprint arXiv:2503.02048, 2025
-
[34]
Prodmp: A unified perspective on dynamic and probabilistic movement primitives[J]
Li G, Jin Z, V olpp M, et al. Prodmp: A unified perspective on dynamic and probabilistic movement primitives[J]. IEEE Robotics and Automation Letters, 2023, 8(4): 2325-2332
2023
-
[35]
Denoising diffusion probabilistic models[J]
Ho J, Jain A, Abbeel P. Denoising diffusion probabilistic models[J]. Advances in neural information processing systems, 2020, 33: 6840-6851. Shuai Kereceived the B.E. degree from the School of Automation, China University of Geosciences, Wuhan, China, in 2023. He is pursuing a Ph.D. in mechanical engineering at Huazhong University of Science and Technolog...
2020
-
[36]
His research interests include robotics, mul- tiaxis machining, and control engineering. Dr. Ding was elected a Member of the Chinese Academy of Sciences, in 2013
2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.